KEBA系统配置说明
keba操作手册
keba操作手册【KEBA操作手册】第一章:KEBA基础知识1.1 KEBA简介KEBA是一种先进的工业自动化控制系统,广泛应用于各种领域,如机器人控制、数控系统、智能制造等。
本章将介绍KEBA的基本概念及特点。
1.2 KEBA系统架构KEBA系统由硬件和软件两部分组成。
硬件包括控制器、人机界面和外部设备;软件包括操作系统、编程语言和应用软件。
本节将详细介绍KEBA系统的架构和各个部分的功能。
1.3 KEBA编程语言KEBA提供了多种编程语言来编写控制程序,如KEBA标准程序语言和KEBA快速编程语言。
本节将介绍这些编程语言的特点和用法。
第二章:KEBA控制器操作2.1 KEBA控制器介绍KEBA控制器是KEBA系统的核心部件,负责控制外部设备和执行控制程序。
本节将介绍KEBA控制器的基本功能和操作方法。
2.2 KEBA控制器设置设置KEBA控制器的参数是使用KEBA系统的第一步,本节将介绍如何进行控制器的设置和参数调整。
2.3 KEBA控制器连接KEBA控制器通常需要与外部设备进行连接,本节将介绍KEBA控制器与各类外部设备的连接方法和注意事项。
第三章:KEBA人机界面操作3.1 KEBA人机界面介绍KEBA人机界面是用户与KEBA系统进行交互的重要工具,本章节将介绍KEBA人机界面的基本功能和操作方式。
3.2 KEBA人机界面设置设置KEBA人机界面的参数可以满足用户的个性化需求,本节将介绍如何进行人机界面的设置和参数调整。
3.3 KEBA人机界面操作KEBA人机界面提供了丰富的操作功能,如程序调试、数据监测等,本节将详细介绍人机界面的操作方法和技巧。
第四章:KEBA程序编写和调试4.1 KEBA程序编写基础KEBA程序是控制系统的核心部分,本节将介绍KEBA程序编写的基本原则和方法。
4.2 KEBA程序调试技巧调试是KEBA系统开发过程中的重要环节,本节将介绍一些常用的KEBA程序调试技巧和注意事项。
KEBA机械手操作说明书(新版本)

操作说明机械手操作说明KEBA机械手0界面简介KeTop是KEBA公司专门为工业机械手手持终端提供的硬件解决方案,该手持终端运行KEBA公司自主研发的人机界面软件TeachView。
该人机界面具有易操作、人性化,符合人机工程学。
TeachView登录界面图左侧的灯与按钮分别为状态与配置管理部分,而右侧按钮为机械手动作操作按钮,底部的按钮则是调节部分。
除了上述三部分,还有急停按钮、USB接口、手动/自动开关。
左侧4个灯表示了系统运行状态。
系统正常启动为RUN灯亮,绿色。
发生错误Error灯会亮,红色。
机械手上电时Motion灯亮,绿色。
左侧7个图标,分别为自定义界面、配置管理、变量管理、项目管理、程序管理、坐标显示、信息报告管理。
右侧机械手动作操作部分,通过按“+”与“-”按键可以在编程或者点动时调节机械手的坐标位置,点击“2nd”按键可以翻到下一页(附加轴页)。
Start和Stop按钮与程序运行和停止有关。
底部F1、F2、Rob、F/B、Jog为闲置未定义按钮,Mot按钮用于机械手上电或下电,Step用于切换程序进入单步模式还是连续模式。
V+和V-用于调节机械手运动速度。
在主界面顶部,有一个状态栏,它包含了机械手的操作模式、状态、坐标、运动调节速度、程序名称、程序状态及执行模式、急停开关的状态、用户等级等有关机械手系统状态方面的信息。
1用户设置数据设置1.1数据设置在该界面用户可以设置机械手零点位置、零点允许误差以及最大位置。
零点允许误差主要用于零点的工作区域设置。
当用户设置的最大位置小于系统默认的最大位置时,该最大位置有效,否则系统使用默认最大位置。
操作数据1.2操作数据在该界面用户可以设置点动速度,回零点操作以及回参操作。
2配置管理维护2.1维护以下简要介绍一下维护界面底部的配置按钮:设置界面设置界面主要完成用户的登入、登出和系统设置。
登录界面可以选择要登录的用户,以及是否具有写权限和控制权。
KEBA机器人培训资料操作说明
KEBA机器人培训资料操作说明
一.KEBA机器人培训资料
1.培训大纲
参训者可以根据KEBA机器人培训大纲来学习。
培训大纲设计有助于提高培训效果,让参训者掌握KEBA机器人技术。
大纲主要分为以下几部分:
•K EBA机器人系统概述:介绍KEBA机器人系统的组成、功能、优点及应用场景。
•K EBA机器人控制技术:讲解KEBA机器人的控制技术,包括软件设计、硬件设计、系统调试和维护等。
•K EBA机器人编程:学习KEBA机器人编程语言,如KEBA-Wedo、KEBA-VSDK等,以及如何编写KEBA机器人程序。
•K EBA机器人应用:介绍KEBA机器人的应用场景,包括控制系统的设计、机械结构及电气结构等。
2.培训内容
参训者可以根据KEBA机器人培训大纲,完成KEBA机器人培训的学习和实践。
培训内容包括:
•K EBA机器人系统概述:介绍KEBA机器人系统的组成、功能、优点及应用场景。
•K EBA机器人控制技术:了解KEBA机器人的控制技术,包括硬件结构、控制系统设计、编程语言及系统调试等。
•K EBA机器人编程:学习KEBA机器人编程语言,如KEBA-Wedo及KEBA-VSDK等,了解如何编写KEBA机器人程序。
•K EBA机器人应用:介绍KEBA机器人的应用场景。
KEBA中文说明书

目录第一章操作显示面板 (1)第二章操作按键 (2)2.1 功能按键 (2)2.2 数字/字母按键 (2)2.3 方向按键 (3)2.4 运行模式按键 (4)2.5 动作按键 (4)2.6 紧急停止开关及其它电气开关 (5)第三章面板显示及操作页面 (6)3.1 面板画面显示 (6)3.1.1 状态栏 (6)3.1.2 画面主菜单 (7)3.2 功能操作页面 (8)3.2.1 启动页面 (8)3.2.2 主监视页面 (9)3.3 开/合模设定页 (11)3.3.1运动参数页面 (12)3.3.2 调模页面 (13)3.3.3 润滑页面 (14)3.4 顶针、吹风设定页 (15)3.4.1运动参数 (16)3.5 中子设定页 (18)3.5.1 设置模式 (19)3.5.2 时间设定 (20)3.5.3 斜率调整 (20)3.6注射、保压设定页 (21)3.6.1运动参数 (21)3.6.2注射辅助 (23)3.7 熔胶和松退页面 (23)3.7.1运动参数 (23)3.8 射台运动和清料页面 (26)3.8.1 运动参数 (27)3.9 温度页面 (28)3.9.1 加热设定页面 (29)3.10 登录/注销页面 (30)3.11 模具数据页面 (31)3.12 温度数据”页面 (32)3.13 “机器数据”页面 (32)3.14 “生产管理”页面 (33)3.15 IO监控画面 (34)3.16 生产过程数据(PDP)画面 (35)3.17 质量监控(SPC)画面 (36)3.18 “浏览”页面 (37)3.19 “历史信息”页面 (38)3.20 “注射曲线图”页面 (39)3.21 校准页面 (40)3.21.1压力校正 (40)3.21.2 流量校正 (41)3.22 设定显示 (42)3.23 软件版本 (42)第四章整机运行操作 (43)4.1 手动操作 (43)4.2 半自动操作 (43)4.3全自动操作 (43)第一章操作显示面板操作面板提供操作者与机器间的沟通介面。
电气培训KEBA
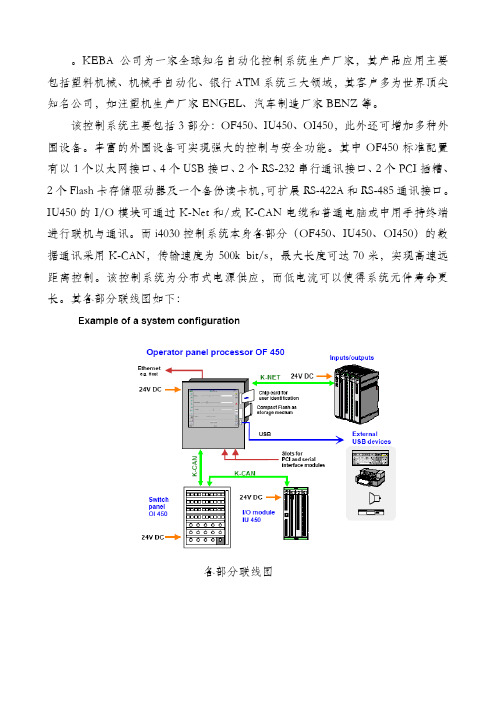
KEBA公司为一家全球知名自动化控制系统生产厂家,其产品应用主要包括塑料机械、机械手自动化、银行ATM系统三大领域,其客户多为世界顶尖知名公司,如注塑机生产厂家ENGEL、汽车制造厂家BENZ等。
该控制系统主要包括3部分:OF450、IU450、OI450,此外还可增加多种外围设备。
丰富的外围设备可实现强大的控制与安全功能。
其中OF450标准配置有以1个以太网接口、4个USB接口、2个RS-232串行通讯接口、2个PCI插糟、2个Flash卡存储驱动器及一个备份读卡机,可扩展RS-422A和RS-485通讯接口。
IU450的I/O模块可通过K-Net和/或K-CAN电缆和普通电脑或中用手持终端进行联机与通讯。
而i4030控制系统本身各部分(OF450、IU450、OI450)的数据通讯采用K-CAN,传输速度为500k bit/s,最大长度可达70米,实现高速远距离控制。
该控制系统为分布式电源供应,而低电流可以使得系统元件寿命更长。
其各部分联线图如下:各部分联线图一、i4030高端注塑机专用控制系统OF450操作面板OF 450是整个控制系统的中心,是基于PC技术的。
12.1”全真彩触摸屏控制屏(65535色TFT),INTEL赛扬400处理器,融入嵌入式奔腾技术,内存128 MB SDRAM。
①本控制系统可以进行计算机的模拟工作,系统所有控制数据储存于背面Flash卡中,应用起来非常方便,而正面Flash卡可作备份,使得储存资料更加安全,并支持使用能识别身份的智能卡,避免无权限的人进行非法操作。
②强大灵活的接口功能,有接鼠标与键盘的USB接口,使得操作更为简便外,并方便地实现与外界的通讯及交换数据。
使用另一USB接口能将系统显示画面和存储的数据资料利用打印机进行打印输出或用CD-ROM、DVD等硬体作为系统和程序进行存储及备份,使数据保持更加安全。
③通过硬件媒介(如K-CAN或K-NET)可与普通计算机及其他控制系统组成工业控制网络,可以实现金字塔式的管理,达到数据共享及远程集中监控,经由ETHERNET可以联到INTERNET,把文件及数据资料在网络上发布,使在世界各地的用户都能实现数据共享,实现了对注塑机的远程控制与诊断。
Keba控制器DM272模块说明书
DM 272/A
Record of Revision
Record of Revision
Version V1.00 V1.01 V1.02 V1.03
Date 11-2006 07-2007 10-2007 06-2008
V1.31
09-2009
3 Description of the module............................................................................................. 12 3.1 Front view.............................................................................................................. 12 3.2 Accessories........................................................................................................... 13 3.2.1 Connector strip....................................................................................... 13
4 Connections and wiring................................................................................................. 14 4.1 Power supply......................................................................................................... 14 4.2 Digital inputs.......................................................................................................... 14 4.2.1 Example for connecting.......................................................................... 15 4.2.2 Connection diagram............................................................................... 16 4.2.3 Status display......................................................................................... 16 4.3 Interrupt inputs...................................................................................................... 16 4.3.1 Example for connecting.......................................................................... 17 4.3.2 Connection diagram............................................................................... 17 4.4 Digital outputs....................................................................................................... 18 4.4.1 Example for connecting.......................................................................... 18 4.4.2 Connection diagram............................................................................... 19 4.5 Status display........................................................................................................ 19 4.6 EMC and wiring guidelines.................................................................................... 19
KEBA机器人培训资料 操作说明
KEBA机器人操作说明0界面简介KeTop是KEBA公司专门为工业机器人手持终端提供的硬件解决方案,该手持终端运行KEBA公司自主研发的人机界面软件TeachView。
该人机界面具有易操作、人性化,符合人机工程学。
TeachView登录界面图左侧的灯与按钮分别为状态与配置管理部分,而右侧按钮为机器人动作操作按钮,底部的按钮则是调节部分。
除了上述三部分,还有急停按钮、USB接口、手动/自动开关。
左侧4个灯表示了系统运行状态。
系统正常启动为RUN灯亮,绿色。
发生错误Error灯会亮,红色。
机器人上电时Motion灯亮,绿色。
左侧7个图标,分别为自定义界面、配置管理、变量管理、项目管理、程序管理、坐标显示、信息报告管理。
右侧机器人动作操作部分,通过按“+”与“-”按键可以在编程或者点动时调节机器人的坐标位置,点击“2nd”按键可以翻到下一页(附加轴页)。
Start和Stop按钮与程序运行和停止有关。
底部F1、F2、Rob、F/B为闲置未定义按钮,Mot按钮用于机器人上电或下电,Jog用于切换机器人坐标系(轴坐标系、世界坐标系、工具手坐标系),Step用于切换程序进入单步模式还是连续模式。
V+和V-用于调节机器人运动速度。
在主界面顶部,有一个状态栏,它包含了机器人的操作模式、机器人状态及名称、坐标系、运动调节速度、项目程序名称、程序状态及执行模式、急停开关的状态、使用者等级等有关机器人系统状态方面的信息。
1配置管理1.1维护以下简要介绍一下维护界面底部的配置按钮:设置界面设置界面主要完成用户的登入、登出和系统设置。
登录界面可以选择要登录的用户,以及是否具有写权限和控制权。
系统设置包括界面语言选择以及日期、时间的设置,如下图。
用户界面用户为当前连接的使用者,包括其IP地址,等级以及是否有写入权限,如下图。
管理界面只有登录用户为管理员用户时才可以打开管理界面,可以管理用户组,对他们创建、编辑及删除等操作,如下图所示:版本界面版本界面显示控制器、手持设备和工具使用的版本信息。
KEBA控制器
2 系统内部功能及参数设定 ................................................................................................................ 38
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
How to start
一、制作CF卡
1、准备好CF卡和CF卡读卡器,将CF插入读卡器,然后连接计算机。
2、打开KEBA安装光盘软件的目录,找到如下文件双
击打开,出现如下画面,窗口底部的左边是软件的安装窗口链接和KEBA的技术文档链接:
3、单击Installation,在新弹出的窗口中继续点击左下角的Expert Installation,此时会弹出如下的一个窗口:
4、选择KeControl Flash前的Install按钮,打开CF卡安装程序。
5、点击下一步后会提示安装路径(默认会识别出插入的CF卡的盘符,如果有多个移动存储设备,请确认盘符),确认无误后,单击下一步,并确认可以格式化。
6、在新页面中可以填入控制器的名称、IP地址、子网掩码和网关。
建议除了控制器名称外,其他不做更改,直接下一步。
7、等待安装完成后,可以将此安装程序关闭。
二、安装示教器程序
1、回到之前的安装程序列表窗口,点击KeMotion TeachView前的Install按钮
2、在弹出的安装窗口中点击下一步,进入安装选项。
3、选择第一个Standard,并继续
4、同样的,选择安装盘符。
5、根据具体情况,选择示教器的类型,选择完成后点击下一步。
6、确认安装
7、完成后可点击finish,完成CF卡上的安装,并可以退出安装程序、推出CF 卡,将其插入控制器。
三、打开KeStudio程序并写入控制器(以模板程序为例)
首先如果是计算机和控制器直连的话,请设置计算机的以太网卡的IP和控制器在同一网段(控制器的IP设置在第一步,制作CF卡的时候已经填过)
1、打开KeStudio V2.3
2、左上角点击File—New from template
3、在弹出的对话框中找到模板程序的路径(例如:C:\Kemro\KeStudio V2.3\Projects\KeMotion\Samples_KeMotion_r4000_r5000_02.50b\RC\ArtarmTX60 L)并选择一个模板程序打开。
4、打开过程中会提示该模板程序为只读,确认后继续。
打开后,请在其他路径另存为一个新的程序。
5、另存为完成之后不需对程序进行更改,按下图所示,选择自己的PLC并激活为当前的PLC
6、PLC激活后,当前PLC会变成黄色底色(如:),并且右边会显示一些信息和状态
7、此时就可以正常将程序写入控制器了,选择菜单栏Online—Login,系统会自
动编译,编译通过之后就会弹出对话框,确认写入。
8、程序写入成功后请运行
四、关于示教器的连接
1、控制器成功运行了之后,可以打开示教器的仿真软件,来进行模拟仿真
2、第一次打开TeachView的时候可能需要手动添加控制器的IP,添加成功后就能正常显示当前控制器的名字并可以继续了,如图
3、下图是进入后的初始画面
4、首先点击扳手图标,选择service,并在新的页面中以管理员权限登录,(密码:pass)
5、在获得管理员权限之后就可以进行后续的一系列操作了。
具体操作内容及介绍请参考PDF文档——《KEBA机器人操作说明》
四、利用Scope程序来查看机器人的运动
1、打开KeStudio Scope程序
2、在打开的scope程序中连接控制器,然后点击“start record”按钮开始记录机器人的数据
3、在左下角的Sampler Info窗口中选择监控记录的数据
4、打开模板程序的机器人模型。
在弹出的对话框中找到与写入控制器的模板程序相对应的机器人模型的路径
(例如:
C:\Kemro\KeStudioV2.3\Projects\KeMotion\Samples_KeMotion_r4000_r5000_02.50b\RC\Artar mTX60L\Scope)并打开。
5、在如下的窗口中可以对视角进行缩放、旋转、移动,将机器人放在一个教容易观察其运动的视角
6、此时,scope软件就可以同示教器仿真软件一起来连调了。
具体操作和介绍请参考PDF 文档《KEBA机器人操作手册》。