空间定位几种常用的空间定位技术共79页
三维空间测向定位技术
角得到, : 即 NB= ( Y, 。 z, )
2
口2 I乜2 l
+ 2 + 2 b =1 z -
其中:
() 1 上/
z一 - C S ・sn9・c 2 s nO・sn2 O ̄ i os - i i
.
= - C S ・s n9・sn ̄ snO ・c s O ̄ i i l i - oA Z= C S O  ̄・c os
p o e t fr d rwa e ta s tig i h p c n zmu h o a g tt c u t to s Th e s q a e r p ry o a a v r n mitn n t e s a e a d a i t ftr e o s o tsa in . ela ts u r
( , 为 Ⅳ 点 的经 纬 度 。
设 NB 的 向量 为 ( Y, , z, ) MN 的单 位 向 量 为
( q r ( 1 3 b 中 Ⅳ 点 的 单 位 法 线 向量 ) 则 p, ,) 见 . ( ) ,
一 —
( - esn  ̄ 1 0 1 2— Z )/ i 2‘
MN 和 NB所 在平 面 的一 个垂 直 向量 为 :
( 北 不平 行 ) 将 曲面 投 影 到 二 维平 面 后 不 可 能 消 正 , 除所 有点 的 正北偏 差 ; 一方 面 , 另 投影 变换 会造 成 不
空间定位-几种常用的空间定位技术
混合定位技术的组成
全球定位系统(GPS)
无线局球的 优点。
利用无线信号覆盖范围内的网络接入点(AP) 进行定位,适用于室内环境。
蓝牙(Bluetooth)
包括一个主控站、一个数据注入站 和若干监测站。
用户部分
包括GPS接收机和数据处理软件等。
GPS的优缺点
优点
覆盖全球、实时性强、定位精度 高、抗干扰能力强等。
缺点
受环境影响较大,如建筑物、山 体等遮挡物可能影响信号接收; 同时需要一定的时间进行初始化 ,不能实现快速定位。
02
惯性导航系统
惯性导航系统的工作原理
THANKS FOR WATCHING
感谢您的观看
惯性导航系统通过测量载体在运动过程中的加速度和角速度,经过积分运算得到速 度、位置和姿态信息。
载体运动过程中,加速度计测量载体的线加速度,陀螺仪测量载体的角速度,通过 积分运算得到速度和位置信息。
惯性导航系统不需要外部信号源,可以在任何环境下独立工作,因此具有较高的自 主性。
惯性导航系统的组成
惯性测量单元
其他辅助定位技术
通过蓝牙信号传输进行定位,适用于短距 离、小范围的定位需求。
如惯性传感器、磁场传感器等,用于辅助 和补充其他定位技术,提高定位精度和稳 定性。
混合定位技术的优缺点
优点
混合定位技术结合了多种定位技术的优点,提高了定位精度 和可靠性,同时可以满足不同场景下的定位需求。
缺点
混合定位系统实现较为复杂,需要处理不同定位技术的数据 融合和互补问题;同时,不同定位技术的覆盖范围和精度可 能存在差异,需要合理配置和优化。
展馆四要素——定位、内容、空间、运营
展馆四要素——定位、内容、空间、运营归根究底,把一个展馆回归到原点,我之前提过一个《展馆的三元词》理论,即定位、内容与空间。
从现状发展的轨迹来说,可能还要再增加一个词:运营。
构成“展馆四要素”:定位、内容、空间、运营。
所有的展馆进行高度总结与归纳之后,要解决的其实就这四个问题。
因此,我的策划逻辑就是从这四个角度展开的。
老习惯,先上一张全图,然后再细说。
(看不清直接微信我yeqiu4766314要大图)1定位没有一个展馆是孤立存在的,许多策划一上手就开始做内容是不对的。
展馆有其建立与存在的必要性和必然性,其实一个项目的成败,绝大多数取决于这个阶段。
因此,在这个阶段,我要重点说明的是解决定位问题的思考维度。
01地块的维度我有个习惯,不馆做什么项目,都要把地块情况摸得通透,在大部分情况下,策划与设计是分不开的,因此从一开始就要考虑设计展开的便利,如果闭门造车,会给设计带来很大的不便。
结构如下:《主题展馆,方向比努力更重要》地块考虑的维度包括展馆的位置、交通、周边业态、面积、层高、楼层高、朝向、光环境、楼板厚度、柱间距、消防、配套设施等内容。
位置、交通、朝向、面积、配套设施、周边业态等条件决定了策划内容和未来展馆运营时的策略制定。
位置在哪个城市?在哪个区位?在哪个地块?在哪个层面?在哪个城市?每个城市都拥有独一无二的历史和文化,对这个城市历史和文化的了解,有助于对展馆内容的理解,特别是针对一些历史类的博物馆、规划馆。
而即使不是此类展馆,城市的独特景观或文化亦可赋予展馆不同的韵味和视觉设计。
在哪个区位?是新城市区还是老城区?政府对它的定位是文化名城还是工业新城?在哪个地块?是商业地块?公益地块?农业地块?居住地块?在哪个层面?是地下空间?地面空间?在地面空间的几楼?交通区位交通怎样?地段交通怎样?周边路况如何?有无停车场?……这些问题直接关系到对观众的交通引导、现场的导流、出入口的设计等内容。
周边业态周边业态可分为泛周边业态和近周边业态。
常用坐标系之间的关系与转换
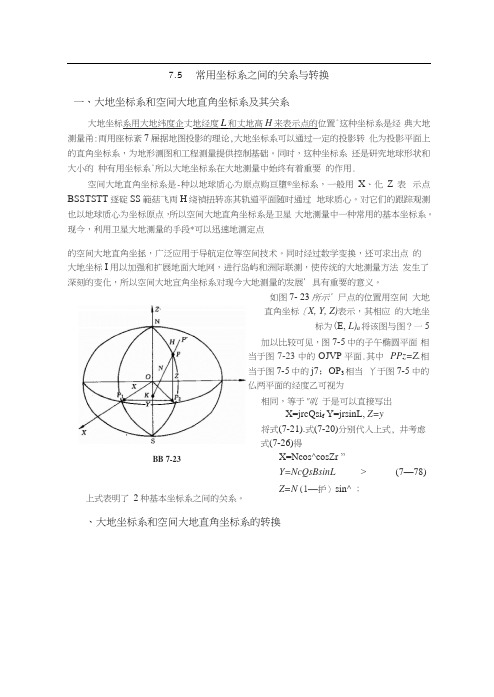
7.5 常用坐标系之间的关系与转换一、大地坐标系和空间大地直角坐标系及其关系大地坐标系用大地纬度企丈地经度L 和丈地髙H 来表示点的位置°这种坐标系是经 典大地测量甬:両用座标紊7屜据地图投影的理论,大地坐标系可以通过一定的投影转 化为投影平面上的直角坐标系,为地形测图和工程测量提供控制基础。
同时,这种坐标系 还是研究地球形状和大小的 种有用坐标系°所以大地坐标系在大地测量中始终有着重要 的作用.空间大地直角坐标系是-种以地球质心为原点购亘墮®坐标系,一般用X 、化Z 表 示点BSSTSTT 逐碇SS 範菇飞両H 绕禎扭转冻其轨道平面随时通过 地球质心。
对它们的跟踪观测也以地球质心为坐标原点,所以空间大地直角坐标系是卫星 大地测量中一种常用的基本坐标系。
现今,利用卫星大地测量的手段*可以迅速地测定点的空间大地直角坐拯,广泛应用于导航定位等空间技术。
同时经过数学变换,还可求岀点 的大地坐标I 用以加强和扩展地面大地网,进行岛屿和洲际联测,使传统的大地测量方法 发生了深刻的变化,所以空间大地宜角坐标系对现今大地测量的发展’具有重要的意义。
、大地坐标系和空间大地直角坐标系的转换如图7- 23所示’尸点的位置用空间 大地直角坐标〔X, Y, Z)表示,其相应 的大地坐标为(E, L)a 将该图与图?一5上式表明了 2种基本坐标系之间的关系。
加以比较可见,图7-5中的子午椭圆平面 相当于图7-23中的OJVP 平面.其中 PPz=Z.相当于图7-5中的j7;OP 3相当 丫于图7-5中的仏两平面的经度乙可视为相同,等于"叽 于是可以直接写岀X=jrcQsi f Y=jrsinL, Z=y将式(7-21).式(7-20)分别代入上式, 井考虑式(7-26)得X=Ncos^cosZr ”Y =NcQsBsinL > (7—78)Z=N (1—护〉sin^ ;BB 7-231.由大地坐标求空间大地直角坐标当已知椭球面上任一点P 的大地坐标(B, L)时,可以按式(7-78)直接求该点的 空间大地直角坐标(X, Y, Z)。
空间定位几何基础原理
这样的情况下,通过一些转换就使这个非线性方程的求解问题被转化为解 一个线性方程组的问题,那么 就是这个方程的决定性算子,称之为三维空间
3
的定位算子 。
3
x1 x2 8det x1 x3 x x 1 4
3
y1 y2 y1 y3 y1 y4
z1 z2 z1 z3 z1 z4
即,一定存在 k1 , k2 , k3 ,使得下列关系成立:
k1 PP 1 2 k2 PP 1 3 k3 PP 1 4 0
不失一般性,首先假定 k1 0 。在这种情况下, P 1P 2 可以被写为 P 1P 3 和P 1P 4 的线性结合。也就是说向量 P 1P 2 ,P 1P 3 和P 1P 4 是在一个平面上。因此 P1, P2, P3 和 P4 四个节点在同一个平面上。 这样证明了定理 1 的必要性。 通过了充分性和必要性的证明,定理 1 得到了证明。
p1 P1
P3 p3
p2 P2 p O p4 P4
图 2 参考点共面 Fig 2 Reference nodes on a plane
证明:
1.充分性:如果这四个节点中的任意两个是相同的,那么能够推导出定(i 1, 2,3, 4) 四个节点是不同的节点。如果
定理 1 的充分性得到了证明。
3 2.必要性:首先假定定位算子 0 ,那么这里一定存在 k1 , k2 , k3 ,这
样:
k1 ( x2 x1 , y2 y1 , z2 z1 ) k2 ( x3 x1 , y3 y1 , z3 z1 ) k3 ( x4 x1 , y4 y1 , z4 z1 ) 0
空间定位的几何基础
GPS基本知识

第一章1 .GPS卫星定位技术的发展概况:答:卫星定位技术是利用人造地球卫星进行点位测量的技术。
20世纪50年代末期,美国开始研制用多普勒卫星定位技术进行测速,定位的卫星导航系统,叫做子午卫星导航系统(NNSS)。
多普勒定位具有经济快速,精度均匀,不受时间和天气的限制等优点。
以此同时前苏联也开始建立了一个卫星导航系统,叫做CICADA。
由于发展的需要美国于1973年研制新建了GPS系统。
该系统是以卫星为基础的无线电导航系统,具有全能性,全球性,全天性,联系性和实时性的导航,定位和定时的功能。
能为用户提供精密的三维坐标,速度和时间。
GPS计划经历了方案论证,系统论证,生产试验三个阶段。
整个系统分为卫星星座,地面控制和监测站,用户设备三大部分。
再后来的30多年中全球又建立了GLONASS全球定位系统(俄罗斯),伽利略(GALILEO)全球定位系统(欧盟);北斗导航定位系统(中国)。
不久的将来,它们将共同组成全球导航卫星系统GNSS,到那时全球导航卫星将有一百多颗,定位精度和定位速度都将大大提高。
2.GPS系统组成:GPS系统包括三大部分:空间部分——GPS卫星星座;地面控制部分——地面监控系统;用户设备部分——GPS信号接收机。
GPS由21颗工作卫星和3颗在轨备用卫星组成卫星星座,记做(21+3)GPS星座。
24颗卫星均匀分布在6个轨道平面内,轨道倾角为55°,各个轨道平面之间相距60°,即轨道的升交点赤经各相差60°。
GPS卫星的核心部件是高精度的时钟,导航电文存储器,双频发射和接收机以及微处理机。
GPS工作卫星的地面监控系统包括1个主控站,3个注入站和5个监测站。
卫星上的各种设备是否正常工作,以及卫星是否一直沿着预定轨道运行,都要由地面设备进行监测和控制。
地面监测系统另一重要作用是保持各颗卫星处于同一时间标准——GPS时间系统。
这就需要地面站监测各颗卫星时间,求出钟差,然后由地面注入站发给卫星,卫星再由导航电文发给用户设备。
技能认证机械工程制图考试(习题卷20)
技能认证机械工程制图考试(习题卷20)第1部分:单项选择题,共41题,每题只有一个正确答案,多选或少选均不得分。
1.[单选题]在孔或轴的基本尺寸后面,注出偏差值,这种标注形式用于( )零件图上。
A)成批生产B)单件或小批量生产C)生产批量不定答案:B解析:2.[单选题]不可见轮廓线采用( )来绘制。
A)粗实线B)虚线C)细实线答案:B解析:3.[单选题]任意三角形的尺寸标注需要使用的命令为( )A)线性标注B)快速标注C)对齐标注答案:C解析:4.[单选题]创建10行、20列边长为50的矩形用哪种方法最合理A)复制B)偏移C)阵列答案:C解析:5.[单选题]三投影体系的构成中,“三线”指:OX,OY和______。
A)OTB)OZC)OH答案:B解析:6.[单选题]机械制图中图面上采用的单位是( )A)厘米B)分米C)毫米D)米答案:C解析:样中把比值化成( )的形式。
A)角度B)1:nC)分数D)线形答案:B解析:8.[单选题]定位尺寸通常以图形的定位线,中心线或某-轮廓线作为标注尺寸的起点,这个起点叫做A)尺寸基准B)尺寸数字C)尺寸符号D)尺寸号码答案:A解析:9.[单选题]对同一表面,但有不同粗糙度要求时,须用( )画出其分界线,并注出相应的表面粗糙度代号和尺寸。
A)粗实线B)细实线C)点画线D)虚线答案:B解析:10.[单选题]当零件的大部分表面具有相同的粗糙度要求时,可将代号统一注写在图样的右上角,代号前加()二字。
A)其余B)其它C)所有D)不加任何字样答案:A解析:11.[单选题]如果需要改变标题栏的方位时,必须将其旋转至图纸的______。
A)右上角B)右下角C)左上角D)左下角答案:A解析:12.[单选题]用于确定平面图形中某一形状大小的尺寸称为A)定位尺寸B)定形尺寸C)长度尺寸D)高度尺寸答案:B解析:13.[单选题]螺纹有五个基本要素,它们是A)牙型、直径、螺距、旋向和旋合长度C)牙型、直径、螺距、导程和线数D)牙型、直径、螺距、线数和旋合长度答案:D解析:14.[单选题]表面粗糙度是( )误差A)宏观几何形状B)微观几何形状C)宏观相对位置D)微观相对位置答案:B解析:15.[单选题]左视图反映了物体的什么方位A)上下B)左右C)上下前后D)前后左右答案:C解析:16.[单选题]。
空间定位几何基础原理
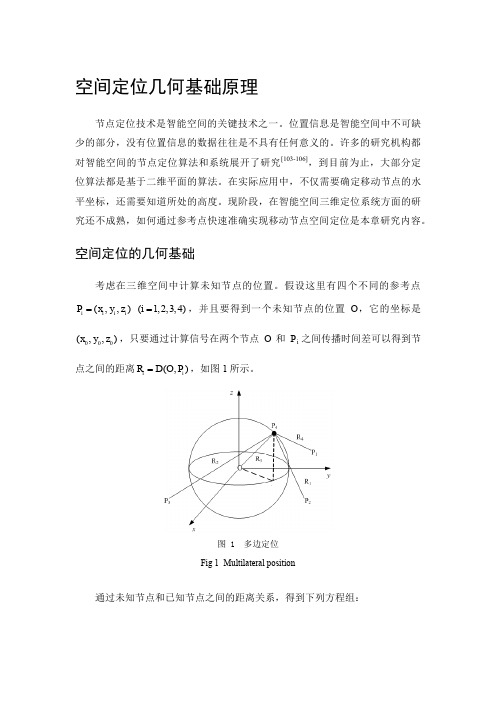
节点定位技术是智能空间的关键技术之一。位置信息是智能空间中不可缺 少的部分,没有位置信息的数据往往是不具有任何意义的。许多的研究机构都 对智能空间的节点定位算法和系统展开了研究 [103-106] ,到目前为止,大部分定 位算法都是基于二维平面的算法。在实际应用中,不仅需要确定移动节点的水 平坐标,还需要知道所处的高度。现阶段,在智能空间三维定位系统方面的研 究还不成熟,如何通过参考点快速准确实现移动节点空间定位是本章研究内容。
即,一定存在 k1 , k2 , k3 ,使得下列关系成立:
k1 PP 1 2 k2 PP 1 3 k3 PP 1 4 0
不失一般性,首先假定 k1 0 。在这种情况下, P 1P 2 可以被写为 P 1P 3 和P 1P 4 的线性结合。也就是说向量 P 1P 2 ,P 1P 3 和P 1P 4 是在一个平面上。因此 P1, P2, P3 和 P4 四个节点在同一个平面上。 这样证明了定理 1 的必要性。 通过了充分性和必要性的证明,定理 1 得到了证明。
经过对方程组(2)近一步的计算可以得到如下方程组:
(2)
2( x1 x2 ) x 2( y1 y2 ) y 2( z1 z2 ) z 1 2( x1 x3 ) x 2( y1 y3 ) y 2( z1 z3 ) z 2 2( x x ) x 2( y y ) y 2( z z ) z 1 4 1 4 3 1 4
空间定位的几何基础
考虑在三维空间中计算未知节点的位置。假设这里有四个不同的参考点
P i ( xi , yi , zi ) (i 1, 2,3, 4) ,并且要得到一个未知节点的位置 O ,它的坐标是 ( x0 , y0 , z0 ) ,只要通过计算信号在两个节点 O 和 Pi 之间传播时间差可以得到节
森林经营规划_南京林业大学中国大学mooc课后章节答案期末考试题库2023年
森林经营规划_南京林业大学中国大学mooc课后章节答案期末考试题库2023年1.森林成熟与农作物及蔬菜等的成熟一样,具有明显性。
参考答案:错误2.轮伐期越长,相应的经营措施就多;相反就少。
参考答案:正确3.在我国,林业分工论首先由我国原林业部()老部长为首的一批专家提出,并形成一套系统的林业经营理论体系。
参考答案:雍文涛4.森林经营单位在申请森林认证之前,不一定要进行自我评估。
参考答案:错误5.世界上最早出现的卫星导航定位系统是()。
参考答案:美国GPS6.遥感技术由()等构成要素组成。
参考答案:传感器_遥感对象_信息传播媒介7.在美国,()被称为20世纪“三大航天工程” 。
参考答案:GPS全球卫星定位技术_“阿波罗”飞船登月_航天飞机升空8.与地理位置有关的信息称为地理信息,地理信息仅图形数据,不包括属性数据。
参考答案:错误9.获取信息快,更新周期短,具有动态监测功能,是遥感的突出特点。
参考答案:正确10.()是一个由计算机软件、硬件、方法库和专业人员组成的,可实现空间数据采集、管理、操作、分析和可视化,以而解决复杂的规划和管理问题的计算机化的系统。
参考答案:地理信息系统11.在林业遥感应用中,()与纹理信息结合,可以识别树种、进行树种空间分布制图。
参考答案:高光谱12.邬建国将景观生态学的核心概念总结为:1、格局—过程—尺度;2、空间异质性和缀块性;3、生态学干扰;4、缀块—廊道——基底模式。
参考答案:正确13.景观生态学起源于中欧,1939年德国地植物学家特罗尔(Carl Troll)在“航空象片制图和生态学的土地研究”一文中,首次提出景观生态学概念。
参考答案:正确14.根据第八次森林资源清查结果,建国以来,我国森林覆盖率翻了()倍。
参考答案:215.根据第八次森林资源清查结果,我国森林面积在世界排名()参考答案:第五16.检查法,顾名思义,通过定期重复调查来检查森林结构、蓄积和生长量的变化。
CORS相关定位技术
浅谈CORS相关定位技术陈允约摘要:作为卫星定位技术、计算机网络技术、数字通讯技术等高新科技多方位、深度结晶的产物,CORS系统已成为城市GPS应用的热点之一,它在城市测量中的作用也越来越重要。
本文主要讨论的CORS系统的相关定位技术,并对网络RTK技术作重点阐述。
关键词:CORS;网络RTK;VRS1 绪论1.1 引言GPS技术是一种空间定位技术,它的发展过程包括定位精度逐渐提高、应用范围逐渐广泛和服务系统逐渐完善,具有标准定位服务(SPS)、精密定位服务(PPS)、实时动态定位技术(RTK)、精密单点定位技术(PPP)等多种应用形式。
其中,CORS连续运行参考站系统作为GPS发展的一个重要方向,是一个集GPS技术、计算机技术和网路技术于一身,可以作为一个区域的能满足多层次、多用途的空间数据基础设施。
CORS系统的定义CORS是网络技术与GNSS(Global Navigation Satellite System)定位技术、现代大地测量、地球动力学交叉融合的产物,并组合成网络,是一种提供移动定位、动态连续的空间参考框架和地球动力学参数等服务的信息系统;是动态地、快速地、高精度地获取空间数据和地理特征的现代信息基础设施。
该系统通过建立覆盖一定区域的一个或多个固定的连续运行的GNSS参考站,利用计算机网络技术,实时或准实时地根据用户需求提供准确的、多样的数据,包括不同类型的GNSS观测值(载波相位、伪距等),对流层、电离层等各种GNSS误差改正数、状态信息以及授时等其他用户需要的信息。
1.3CORS系统的组成典型的CORS系统是一个分布式网络系统,通常由五个子系统组成:连续运行参考站子系统(Reference Station Sub System, RSS);系统控制与数据处理中心(System Monitor and Control Center, SMC);数据通讯子系统(Data Communication Sub-System, DCS);)用户服务中心(User Servings Sub-System,USS);用户应用子系统(User Application Sub-System,UAS)。