雷达介绍资料汇总(19页)
雷达的知识简介

雷达的知识简介雷达是一种利用射频信号进行探测和测量的技术,广泛应用于军事、航空、气象、地质勘探、交通等领域。
雷达的原理是利用电磁波在空间中传播时的反射和散射现象,通过测量这些反射和散射信号的特性来获取目标的位置、速度、形状等信息。
雷达系统由发射器、接收器和信号处理器组成。
发射器产生一束高频电磁波并发射出去,这些电磁波会在目标上反射或散射,一部分被接收器接收到。
接收器将接收到的信号转化为电信号,并经过放大、滤波等处理后传送给信号处理器。
信号处理器对接收到的信号进行分析和处理,通过计算目标与雷达之间的距离、速度等参数来获取目标的相关信息。
雷达的工作原理是基于电磁波在空间中的传播和反射规律。
当雷达发射出的电磁波遇到目标物体时,部分能量会被反射回来,这部分反射信号称为回波。
根据回波的时间延迟和幅度等特征,雷达可以判断目标物体的位置、距离和速度等信息。
雷达系统中的发射器通常采用高频振荡器和功率放大器组成,能够产生高频电磁波。
这些电磁波的频率通常在几百兆赫兹到几十吉赫兹之间,具有较长的波长。
发射器将电磁波发射出去后,通过天线辐射到空间中。
接收器一般由天线、低噪声放大器、混频器等组成。
天线用于接收回波信号,并将其转化为电信号。
低噪声放大器用于放大接收到的微弱信号,以提高信号的可靠性和灵敏度。
混频器用于将接收到的高频信号与本地振荡器产生的信号进行混频,得到中频信号。
信号处理器是雷达系统中的核心部分,它通过对接收到的信号进行采样、滤波、放大、解调等处理,提取出目标的信息。
信号处理器利用雷达系统中的数学算法和信号处理技术,通过对回波信号的特征进行分析和处理,可以获取目标的位置、距离、速度、形状等信息。
雷达系统的性能取决于发射器的功率、接收器的灵敏度、天线的方向性和信号处理器的算法等因素。
发射器功率的大小决定了雷达的最大探测距离和目标的探测能力。
接收器的灵敏度决定了雷达对微弱回波信号的接收能力。
天线的方向性决定了雷达的目标定位精度和目标的方位角测量能力。
雷达知识点总结
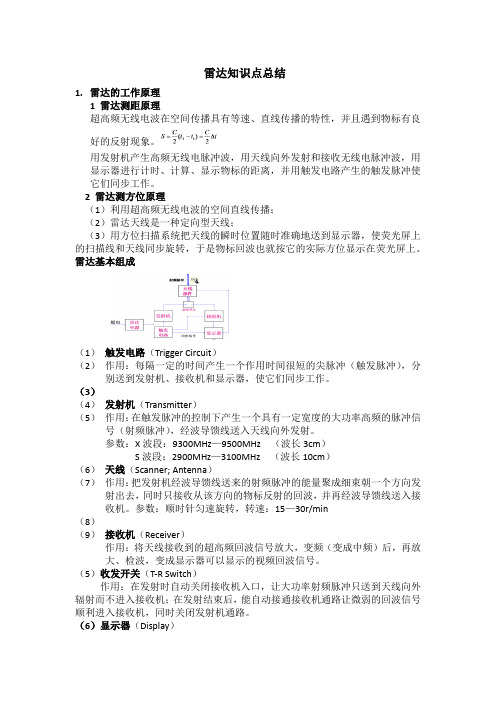
雷达知识点总结1.雷达的工作原理1 雷达测距原理超高频无线电波在空间传播具有等速、直线传播的特性,并且遇到物标有良好的反射现象。
用发射机产生高频无线电脉冲波,用天线向外发射和接收无线电脉冲波,用显示器进行计时、计算、显示物标的距离,并用触发电路产生的触发脉冲使它们同步工作。
2 雷达测方位原理(1)利用超高频无线电波的空间直线传播;(2)雷达天线是一种定向型天线;(3)用方位扫描系统把天线的瞬时位置随时准确地送到显示器,使荧光屏上的扫描线和天线同步旋转,于是物标回波也就按它的实际方位显示在荧光屏上。
雷达基本组成(1)触发电路(Trigger Circuit)(2)作用:每隔一定的时间产生一个作用时间很短的尖脉冲(触发脉冲),分别送到发射机、接收机和显示器,使它们同步工作。
(3)(4)发射机(Transmitter)(5)作用:在触发脉冲的控制下产生一个具有一定宽度的大功率高频的脉冲信号(射频脉冲),经波导馈线送入天线向外发射。
参数:X波段:9300MHz—9500MHz (波长3cm)S波段:2900MHz—3100MHz (波长10cm)(6)天线(Scanner; Antenna)(7)作用:把发射机经波导馈线送来的射频脉冲的能量聚成细束朝一个方向发射出去,同时只接收从该方向的物标反射的回波,并再经波导馈线送入接收机。
参数:顺时针匀速旋转,转速:15—30r/min(8)(9)接收机(Receiver)作用:将天线接收到的超高频回波信号放大,变频(变成中频)后,再放大、检波,变成显示器可以显示的视频回波信号。
(5)收发开关(T-R Switch)作用:在发射时自动关闭接收机入口,让大功率射频脉冲只送到天线向外辐射而不进入接收机;在发射结束后,能自动接通接收机通路让微弱的回波信号顺利进入接收机,同时关闭发射机通路。
(6)显示器(Display)作用:传统的PPI显示器在触发脉冲的控制下产生一条径向的距离扫描线,用来计时、计算物标回波的距离,同时这条扫描线由方位扫描系统带动天线同步旋转。
雷达的知识点总结

雷达的知识点总结一、雷达的工作原理雷达的工作原理是利用发射器发射一定频率的无线电波,当这些电波遇到目标物时,一部分电波被目标物所反射,接收器捕捉这些被反射的电波,并通过信号处理,确定目标物的距离、方向和速度信息。
雷达工作的基本原理包括发射、接收和信号处理三个步骤。
1. 发射:雷达发射器产生并发射一定频率的无线电波,这些电波称为RCS(雷达交会截面)。
2. 接收:当RCS遇到目标物时,一部分电波被目标物所反射,接收器接收并捕捉这些被反射的电波。
3. 信号处理:接收到的被反射的电波通过信号处理系统进行处理,根据信号的时间延迟、频率偏移和振幅变化等信息,确定目标物的距离、方向和速度。
二、雷达的分类根据不同的工作原理和应用领域,雷达可以分为不同的分类。
1. 按工作频率分类:雷达可以根据工作频率的不同分为X波段雷达、K波段雷达、S波段雷达等,不同频率的雷达适用于不同的应用领域。
2. 按工作方式分类:雷达可以根据工作方式的不同分为连续波雷达和脉冲雷达,连续波雷达适用于测距,脉冲雷达适用于测速和目标分辨。
3. 按应用领域分类:雷达可以根据应用领域的不同分为军用雷达、民用雷达、航空雷达、舰船雷达等。
三、雷达的应用领域雷达技术在军事、民用航空、舰船航行、天气预报和科学研究等领域都有重要的应用价值。
1. 军事领域:雷达在军事领域具有重要的作用,可以用于目标探测、追踪和导航,对于战争中的空中防御和攻击具有重要的战术意义。
2. 民用航空:雷达在民用航空领域用于飞行导航、空中交通管制和飞行安全监测,对于航空运输的安全与效率具有重要的作用。
3. 舰船航行:雷达在舰船航行中用于目标探测、导航和防御,对于海上安全和航行效率起到关键的作用。
4. 天气预报:气象雷达用于对大气中的降水、风暴和气旋等气象现象进行探测和监测,对于天气预报和自然灾害预警具有重要的作用。
5. 科学研究:雷达技术也被广泛应用于科学研究领域,例如地球科学领域的地形测绘和地壳运动监测等。
各种类型雷达描述讲解

各种类型雷达描述讲解雷达是一种利用电磁波进行探测、测量和判断目标存在及其位置、运动状态等信息的仪器。
根据其工作原理、用途和性能等不同,雷达可以分为多种类型。
下面将对各种类型的雷达进行详细讲解。
1. 相控阵雷达(Phased Array Radar)相控阵雷达是一种通过控制大量天线单元的相位和振幅,从而改变发射和接收波束方向或形状的雷达系统。
相对于传统雷达,相控阵雷达具有较高的目标探测率、方位精度和抗干扰能力。
它广泛应用于天气雷达、航空管制雷达和军事雷达等领域。
2. 同步脉冲雷达(Synchronous Pulse Radar)同步脉冲雷达是一种雷达系统,它利用脉冲信号与回波信号的同步关系来测量目标的距离。
该雷达系统具有较好的测距精度,适用于测量目标与雷达的距离较远的应用场景,如航天、航空和海洋导航等。
3. 连续波雷达(Continuous Wave Radar)连续波雷达以连续的电磁波信号进行发射与接收,通过测量回波信号与发射信号的频率差异来计算目标的相对速度。
连续波雷达主要应用于测速雷达、防撞雷达以及距离测量等领域。
4. 天气雷达(Weather Radar)天气雷达是一种特殊类型的雷达系统,用于监测大气中的天气现象,如降雨、雷暴和风暴等。
它可以通过测量回波的强度和频率分析,得出天气的类型、强度和运动情况等。
天气雷达在天气预报、气象监测和空中交通控制等领域起到重要作用。
5. 合成孔径雷达(Synthetic Aperture Radar,SAR)合成孔径雷达是利用航天器或飞机在运动中合成一个长虚拟天线孔径,从而产生高分辨率的雷达图像。
它主要用于地面目标检测和监测,如地质勘探、地表变形监测和林业资源观测等。
合成孔径雷达能够克服大气、云层和深度研究等问题,以获取高精度的地表信息。
6. 目标识别雷达(Target Recognition Radar)目标识别雷达是一种能够识别雷达回波中的目标特征,并据此判断目标的类型、形状和材料等信息的雷达系统。
雷达的知识简介
雷达的知识简介雷达是一种利用无线电波进行探测和测量的技术。
它可以通过发射电磁波并接收其反射来探测目标的位置、速度和其他特征。
雷达广泛应用于军事、航空、航海、气象和科学研究等领域。
雷达的工作原理是利用电磁波的特性,通过发射器产生的高频电磁波向周围空间传播。
当这些电磁波遇到物体时,会发生反射、散射和折射等现象。
接收器接收到反射回来的电磁波,并通过信号处理和分析,可以确定目标的位置、距离和速度等参数。
雷达的基本组成部分包括发射器、接收器、天线和信号处理系统。
发射器产生高频电磁波,并将其通过天线发射出去。
接收器接收到反射回来的电磁波,并将其转化为电信号。
天线用于发射和接收电磁波。
信号处理系统对接收到的电信号进行处理和分析,得出目标的相关信息。
雷达的应用十分广泛。
在军事领域,雷达可以用于侦察和监视敌方目标,帮助决策者做出正确的决策。
在航空和航海领域,雷达可以用于导航和防撞系统,提高航行安全性。
在气象预报中,雷达可以用于探测降水、风暴和气象现象,提供准确的天气预报。
在科学研究中,雷达可以用于探测和研究地壳的变化、大气层的结构和太空中的天体等。
雷达技术的发展也带来了许多创新和突破。
例如,通过多普勒雷达可以测量目标的速度,实现对运动目标的跟踪和监测。
通过合成孔径雷达可以提高图像的分辨率,实现对地面目标的高清观测。
此外,还有雷达干涉技术、相控阵技术等,不断推动着雷达技术的发展。
然而,雷达技术也存在一些局限性。
例如,由于电磁波的传播特性,雷达在大气层中的传播会受到影响,导致信号衰减和多径效应。
此外,雷达对目标的探测范围和分辨率也有一定限制,尤其在复杂的环境中。
雷达是一种重要的无线电技术,具有广泛的应用领域和深远的影响。
随着科技的进步和创新的推动,雷达技术将继续发展,为各个领域带来更多的创新和突破。
雷达介绍

A A<0.25; B>0.25 B<0.5; C>0.5
D E<3.0; F>3.0 G<6.0; H>6.0 I<10.0; J>10.0
J J<20.0; K>20.0
K L<60.0; M>60.0
42
五、雷达的分类
频带
HF VHF, UHF
UHF, L S, C
X, Ku, K
Ku, K, Ka
17
三、雷达的发展历史
捷克“塔马拉”雷达系统(被动雷达)
分析空中商用电台、电视的频率和信号特征及其他信号的 波动状态来侦测隐形飞机。
18
四、雷达的应用
1、远程预警雷达
弹道导弹防御, 探测洲际导弹, 和绕地球的卫星 420-450兆赫(UHF) 探测距离4800~5550km 高32m,2000个阵元
2)不适合大面积搜索 3) 制作精度高,可靠性不高
应用:目标探测和监视 、火控和跟踪 、导引头和导弹末制导 、
外层空间
37
四、雷达的应用
16、激光雷达 优点:◆频率高(比微波高3~4个数量级)。多普勒频率高,对抗电子干扰、
反隐身,高精度测距(cm)◆能量高度集中,无副瓣
缺点: ◆激光的大气传输效应(大气悬浮粒子对于光能的吸收和散射)限制了
近地应用时的作用距离 ◆极窄的波束使得对于运动目标的搜索和捕获比较困难, 通常需要靠其他手段来引导。
应用:飞行器空间交会测量 ,目标精密跟踪,瞄准,直升机防撞告警 ,化学
战剂和局部风场测量 ,水下目标探测 (蓝绿激光0.5um可探测深达百米的目标)
38
五、雷达的分类 ➢按安装位置分
关于雷达的资料四年级
关于雷达的资料四年级
雷达是一种利用电磁波进行探测和测量的仪器,其名称来源于英文“RAdio Detection And Ranging”的缩写。
雷达的发明和发展,极大地促进了人类的科学技术进步,应用范围也越来越广泛。
雷达有许多种类,其中最常见的就是气象雷达和军用雷达。
气象雷达主要用于天气预报和气象学研究,可以探测降水、云层、风暴等天气现象,为人们提供重要的气象信息。
而军用雷达多用于军事侦察、导航、目标跟踪和武器引导等方面,是现代战争中不可或缺的武器。
雷达的工作原理是利用电磁波的反射和回波来探测目标的位置和属性。
雷达发射器会向目标发射电磁波,当这些电磁波遇到目标时,会发生反射和散射,一部分电磁波会返回雷达接收器,在接收器中产生回波信号。
通过测量回波信号的时间延迟和频率变化,就可以确定目标的距离、速度和方向。
雷达在日常生活中也有很多应用,比如汽车雷达、船舶雷达和航空雷达等。
汽车雷达可以帮助司机及时发现前方障碍物,避免交通事故的发生。
船舶雷达可以帮助船长在海上航行时,及时探测障碍物和其他船只,确保船只安全。
航空雷达则可以帮助飞行员及时发现空中障碍物和其他航空器,确保航班安全。
除了以上应用,雷达还有许多其他的应用,比如雷达测速仪、雷达
图像成像系统等。
雷达的应用范围越来越广泛,其在现代工业、军事、交通、通信等领域中,发挥着越来越重要的作用。
雷达是一种十分重要的仪器,其广泛应用,为人们的生产和生活带来了很多便利。
未来,随着科技的不断进步,雷达的应用和发展也将更加广泛和深入。
雷达基础知识
分分层层
积积累累
判判定定
输出
雷达检测
• 发现概率
– 有目标存在,检测器判定有目标,这种事件发生的概率,用Pd 表 示。
• 虚警概率
– 没有目标只有噪声存在,检测器也判定有目标,这种错误事件发生 的概率,用PN 表示。
N
∑tk
PN
=
k =1 N
∑ Tk
k =1
雷达检测
• 发现概率Pd与虚警概率PN和信噪比的关系
内容提要
• 雷达是什么 • 雷达的特点和功能 • 雷达的基本工作原理 • 基本单元 • 雷达波段 • 雷达的分类 • 雷达检测
什么是雷达
• 雷达是利用目标对电磁波的反射、应答或 自身的辐射以发现目标的多种电子设备所 构成的一个整体。
– 一次雷达
• 利用目标电磁波的反射而发现目标的雷达 • 一次雷达是使用得最多的一种雷达
• 常用警戒雷达的作用距离约为500km。 •对洲际导弹的预警雷达,作用距离要求达到
5000km。
– 能够测量目标的距离和方位,测量的精度要 求不高。
雷达的分类
• 指挥引导雷达
– 引导飞机去执行任务。 – 要求雷达能精确地测量目标的距离、方位和高
度,并能进行必要的引导计算。 – 作用距离比警戒雷达要短一些,一般在200-
– 二次雷达
• 通过对询问信号的应答而发现目标的雷达
– 被动雷达
• 利用目标自身的电磁辐射来发现目标的雷达
雷达的特点和功能
• 特点
– 作用距离远 – 受气象条件的影响不很大
• 功能
– 发现目标 – 测量目标的座标和运动参数 – 识别目标的类型 – 对目标进行跟踪
雷达的基本工作原理
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
概述介绍2100型多扫描气象雷达在气象信息的处理和提炼方法上有革命性的突破,多扫描气象雷达是一种全自动雷达,它可以在不需要飞行员输入扫描角度和进行增益设置的情况下,不管在什么时候,不管飞机的姿态如何,对所有范围内重要的气象信息进行无杂波的显示。
当多扫描气象雷达工作在自动模式的时候,每个飞行员将会获得一般只有有经验的雷达操作员才能获得的气象信息,而飞行员只需进行简单的标准化航空公司飞行员培训。
多扫描气象雷达有效的减少了飞行员的工作负担,并增强了天气的探测能力,增加了机组及旅客的安全性。
多扫描雷达工作的关键在于雷达对雷雨底部反射部分的探测,然后通过先进的数字信号处理技术对地面杂波进行抑制。
为了对短、中、长距离范围内的气象进行更好的探测,多扫描气象雷达也集成了多雷达扫描功能,对扫描角度进行预设。
因此,在不同的飞行阶段,不同的探测距离,它的气象探测结果都十分出色。
真320海里探测和功能是多扫描气象雷达众多新特征中的两个。
多扫描气象雷达因为使用先进的运算法则来消除地面杂波,这使它能够跨越雷达视野的限制,为飞行员提供真正意义上的320海里气象资料。
功能使机组人员能够躲开雷雨顶部渗透,这是如今导致飞机颠簸的主要原因之一。
功能将那些对飞机造成威胁的任何雷雨信息保持在雷达显示屏上,直到它不在对飞机造成威胁为止。
系统描述重要的运行特点全自动工作:多扫描气象雷达设计工作在全自动模式,飞行员只需输入探测范围,而不需要输入扫描角度和进行增益设置。
理想的无杂波显示:第三代地面杂波抑制算法能减少约98%的地面杂波,这使它能理想的无杂波显示有威胁的气象信息。
在不同探测范围和飞行高度情况下良好的气象探测能力:多扫描气象雷达将从不同扫描角度获得的气象数据储存在存储器中,当飞行员选择了所要求的显示范围,不同角度的扫描信息将会从存储器中取出并一起显示。
通过多角度的扫描,可以获得近距离和远距离的气象信息,这使得不管飞机的姿态如何,不管何种探测范围,显示屏上所呈现的都是一幅最优化的气象图。
决策气象:多扫描气象雷达能够提供真正意义上的320海里决策气象信息。
:包括以下功能:传统的加减增益控制:多扫描气象雷达允许机组人员在人工或自动工作模式的时候进行增加或减小增益。
基于温度的增益控制:在高海拔的巡航高度,由于低的雷雨雷达反射率,将会基于温度对雷雨增益进行补偿。
路径衰减补偿和警报():对距飞机80海里范围内的干扰性气象造成的衰减进行补偿,当补偿超过限制,一个黄色的杆将显示以提醒飞行员注意雷达阴影区。
:功能减少了在高海拔巡航高度时疏漏雷雨顶部渗漏的可能性。
多扫描气象雷达向下扫描波束的信息和它的信息存储能力将发挥作用,可以防止在飞机完全穿越有威胁的雷雨区之前,雷雨区图象在显示屏上消失。
海洋气候反射率补偿:多扫描气象雷达能对海洋雷雨反射率的减小进行增益补偿,以便在飞机飞越海洋时提供更精准的气象信息。
全面的低高度气象:在低高度时,多角度扫描的应用使雷达能够通过对飞机飞行路径的扫描来防止闯入拱形雷雨紊流区,能探测出飞机下方正在行成的雷雨,并能看到更大范围内的气象情况。
风切变探测:在起飞和着陆阶段,自动的风切变探测能力将起作用。
地图:地图模式能够探测出主要的地理特征,如城市,湖面,海岸线等。
全范围全模式下的同步显示更新:在自动模式下,机长和副驾驶的显示更新是同步进行的,即使他们选择了不同的显示距离和不同的工作模式。
工作原理雷雨的反射率了解多扫描气象雷达如何工作的关键在于了解雷雨的反射率。
一般来说,雷雨的反射率被划分成三个部分(见图3—1)。
图3—1 雷雨反射级别雷雨的下三分之一由于温度在冰点之上,所以全部由小雨滴组成,这部分是雷雨中对雷达波能量反射最强的部分。
中间部分由过度冷却的水和冰晶组成,由于冰晶是不良的雷达波反射体,所以这部分的反射率开始减小了。
雷雨的上部完全由冰晶组成,所以在雷达上几乎不可见。
另外,正在形成的雷雨在其上部可能会形成拱形的紊流波。
图3—2显示的是一个真实的雷雨。
图3—3显示的是随着扫描俯仰角度的增加相应得到它的一些雷达图。
在实际的人工操作中,通常是在能观察到最多的雷雨反射回波的角度和接收到最少地面杂波的角度之间选择一个折衷的扫描角度。
图3—2 雷雨图3—3 雷雨和在不同扫描俯仰角度时它相应的雷达图理想的雷达波束了解了雷雨的反射率和扫描角度对它的影响,我们可以设想一下探测天气的理想雷达波束的特性。
理想的雷达波束能够直接探测到飞机下方区域,探测出正在形成的雷雨,并且波束能沿地球表面的曲率延伸到雷达波传播的最远距离(图3—4)。
这样,理想的雷达波束能在任何时候显示出飞机到320海里外所有的重要气象信息。
图3—4 理想的雷达波束多扫描对理想雷达波的仿效多扫描雷达通过获取来自不同扫描角度的信息并将其合并进整个气象图中来仿效出理想的雷达波束。
的专利—地面杂波抑制算法被用来消除地面杂波,这使得飞行机组人员能看到0—320海里范围内所有的重要气象目标,而不受地面杂波的干扰(图3—5)。
图3—5 多扫描雷达对理想波束的模拟多扫描雷达的工作程序图3—6显示多扫描雷达的工作程序。
两个不同扫描角度的扫描数据被采集,并对飞机前方不同区域的回波信息进行优化。
一般来说,多扫描气象雷达通过自动调整波束的扫描角度和增益,上部扫描波束探测的是中间区域的气象信息,而下部波束探测的是较近和较远距离的气象信息(图3—7)。
这些信息被存在一个临时的数据库中,当机长或副驾驶选择了一个距离,计算机就回取出相应部分的数据信息,并对其进行合并和杂波抑制。
这样没,不管机组选择了哪个距离,都能得到最优的气象图。
图3—6 多扫描雷达工作程序图3—7 多扫描雷达上下波束的扫描更新速度除风切变模式外,多扫描气象雷达在其它所以模式下完整的进行一次数据处理的总时间是8秒,而在风切变模式下,多扫描和风切变总的处理周期为11.2秒。
因此,在一个数据处理周期内,所观察到的天气情况不会发生明显的改变,改变的只是天气和飞机的相对位置关系。
为此,多扫描气象雷达通过调整(图3—8)和旋转(图3—9)所存储的数据图片来补偿飞机的运动。
这样,多扫描气象雷达在除风切变以外的所以工作模式下每4秒对雷达显示进行一次更新,而在风切变模式下的更新速度为5.5秒。
这种工作方式的一个值得注意的地方在于雷达天线的扫描不再与显示器的扫描相关联,这使得它可以在不妨碍对飞行员进行气象显示的情况下,让天线自由地完成多扫描功能。
图3—8 多扫描雷达对飞机运动进行的图像更新图3—9 多扫描雷达对航向改变进行的图像更新自动增益多扫描气象雷达工作在自动模式时,它能根据大气温度曲线使用不同的增益,以此来对不同时间,地理位置,海拔高度的影响进行补偿,从而在所有飞行阶段都能得到最优化的气象目标回波图。
增益的调整适应了飞机的飞行环境,并在多数情况下提供了最优化的气象图。
总结因为多扫描气象雷达通过角度的设置对飞机前方的气象目标进行探测,并能在有地面杂波的扫描角度所得的回波信息中筛选出重要的气象信息,所以它能基本无杂波的显示0—320海里范围内对飞机有影响的所有气象信息(图3—10)。
而且它的整个工作过程是全自动的,这使得飞行员只需关注对恶劣天气的躲避,而不用操心气象目标的探测和分析。
多扫描气象雷达用产生大量地面杂波的扫描角度来探测雷雨的反射部分,图3—10显示在地面杂波抑制关闭状态下的雷达图,气象目标都被大量的地面杂波所遮蔽了。
图3—10 多扫描雷达在地面杂波抑制()功能关闭时的显示图3—11演示的是在地面杂波抑制功能起作用时的雷达图(从0到160海里范围)。
完全无地面杂波的干扰,只有那些重要的气象目标是可见的。
值得注意的是雷达的扫描角度不在需要在减小地面回波的角度和能观察到最好气象目标回波的角度中折衷了。
图3—11多扫描雷达在地面杂波抑制()功能打开时的显示多扫描气象雷达的控制面板空客的多扫描气象雷达的控制面板是一个双系统、单功能的控制面板。
“双系统”是由于雷达系统可能包含有一套或两套发射/接收机,这是由飞机的构型决定的。
“单功能”意味着在模式、增益及扫描角度设置方面,机长和副驾驶都是相同的。
图4—1 空客飞机的双系统、单功能的控制面板显示指示空客的显示指示自动工作是空客飞机的标准工作模式,因此,当自动多扫描功能被选择后,上是没有指示的。
在人工模式下,将在上显示在扫描俯仰角度代码的旁边。
图4—5上面一幅图显示在自动模式下工作的状态。
因为负1.5度俯仰角代码前没有指示。
的显示是由于它的增益是某个位置的增益,而不是(经过校准的)增益。
下面那幅图显示在人工模式下工作的状态,因为显示在正2度俯仰角度代码的前方。
(经过校准的)增益被选择了,因为指示没有出现。
注意:当气象雷达在(自动)模式出现故障时,显示扫描俯仰角度的区域会显示15、15.5或者16的指示,并伴随有相应的故障信息显示(如:或)。
将雷达转换到(人工)模式并按照雷达的标准操作程序进行操作。
图4—5 空客自动和人工工作模式指示如果自动功能故障,(气象情况)在机组人员来取消自动功能以前,将无气象情况显示,并有显示(图4—6)。
图4—6 空客自动功能故障指示俯仰角度指示不管是波音还是空客的飞机,在自动工作模式,上显示的扫描俯仰角度是上下波束角度的平均值。
例如,在起飞阶段,上下扫描波束的角度相差4度,下面的波束角度为3度,而上面的波束角度为7度,所显示的扫描角度为5度。
随着飞机的爬升,两波束间的角度差越来越小,当达到地面以上10000英尺或更高时,上下波束角度差会维持在2度左右。
注意:由于显示系统的指示为整数,所以在机长和副驾驶的(导航显示)上显示的值可能会有区别,这是由于显示系统的舍入差别造成的。
多扫描雷达自动工作模式多扫描气象雷达被设计成全自动工作模式,只要选择了自动功能和所要求的探测范围,自动模式开始工作。
一旦进入自动模式,雷达回调整扫描角度和增益,以便在任何距离和飞行条件下都能提供最优的气象图。
常规控制电源(开/关)空客:当(系统)开关被选到1或2,雷达就上电了。
当开关打到位时,系统断电。
注意:对空客飞机来说,不管飞机的构型是单收发机还是双收发机,都用一个双系统控制面板。
对单收发机来说,开关的2位置是无效的。
图4—10 空客的控制面板自动工作模式()空客:当开关打到位时,机长和副驾驶位都会工作在自动模式(图4—11)。
当开关打到位时,机长和副驾驶位都会工作在人工模式,具体的控制操作会在人工操作部分描述。
图4—11 空客(人工/自动模式)控制自动模式刚开始被选择时,雷达会首先对飞机的飞行路线进行一次扫描。
这将确保飞行机组人员能马上看到飞机前方的气象情况。
然后雷达会以一个相对低的扫描角度进行一次第二次扫描。
地面杂波抑制算法会从第二次扫描开始发挥作用,并在第十五次扫描开始之前(16秒)完成全部的初始化程序。