交流异步电动机转速闭环控制系统设计
双闭环三相异步电机调压调速系统实验报告

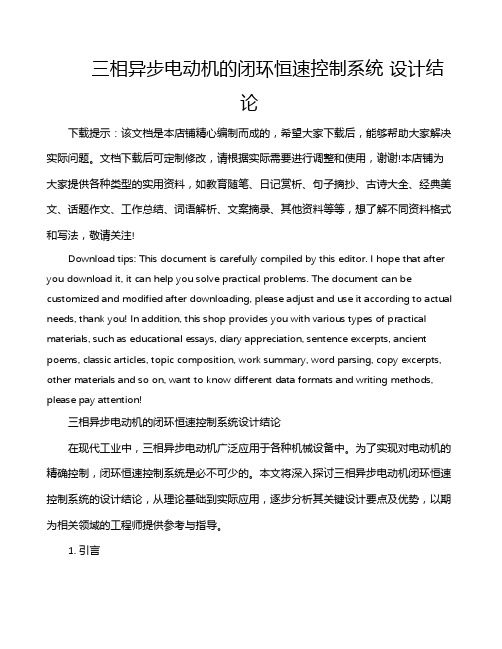
“运动控制系统”专题实验r2 r2+Rs1 r2+Rs2 r2+Rs3sm sm1 sm2 s Tem图6-1整个调速系统采用了速度,电流两个反馈控制环。
这里的速度环作用基本上与直流调速系统相同而电流环的作用则有所不同。
在稳定运行情况下,电流环对电网振动仍有较大的抗扰作用,但在起动过程中电流环仅起限制最大电流的作用,不会出现最佳起动的恒流特性,也不可能是恒转矩起动。
异步电机调压调速系统结构简单,采用双闭环系统时静差率较小,且比较容易实现正,反转,反接和能耗制动。
但在恒转矩负载下不能长时间低速运行,因低速运行时转差功率全部消耗在转子电阻中,使转子过热。
2.双闭环异步电机调压调速系统的机械特性。
转子变电阻时的机械特性:3.三相异步电机的调速方法三种类型:转差功率消耗型:调压、变电阻等调速方式,转速越低,转差功率消耗越大。
转差功率馈送型:控制绕线转子异步电机的转子电压,利用转差功率可实现调节转速的目的。
如串级调速。
转差功率不变型:转差功率很小,而且不随转速变换,如改变磁极对数调速,变频调速。
1)定子调压调速当负载转矩一定时,随着电机定子电压的降低,主磁通减少,转子感应电势减少,转(2)空载电压为200V时n/(r/min) 1281 1223 1184 1107 1045I G/A 0.10 0.11 0.12 0.13 0.13U G/V 182 179 176 166 157 M/(N·m) 0.2265 0.2458 0.2636 0.2814 0.28312.闭环系统静特性n/(r/min) 1420 1415 1418 1415 1416 1412I G/A 0.11 0.14 0.16 0.19 0.21 0.26U G/V 203 200 201 200 200 199 M/(N·m) 0.2394 0.2795 0.3080 0.3777 0.3496 0.4482 静特性曲线:与开环机械特性比较,闭环静特性比开环机械特性硬得多,且随着电压降低,开环特性越来越软。
异步电动机调速系统设计毕业设计论文完整版
题目:异步电动机调速系统设计
系 别:电气与电子工程系 专 业:电气工程及其自动化 姓 名:孙树鑫 学 号:1214040103 指导教师:王明杰
平顶山工学院
2008 年 05 月 23 日
异步电动机调速系统设计
异步电动机调速系统设计
摘要..........................................................................................................................................5
3 矢量控制系统原理..............................................................................................................27 3.1 控制系统原理图............................................................................................................27 3.2 转子磁链计算................................................................................................................29 3.2.1 转子磁链分析.............................................................................................................29 3.2.2 转子磁链计算.............................................................................................................30
三相异步电动机的闭环恒速控制系统 设计结论
三相异步电动机的闭环恒速控制系统设计结论下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!本店铺为大家提供各种类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you! In addition, this shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!三相异步电动机的闭环恒速控制系统设计结论在现代工业中,三相异步电动机广泛应用于各种机械设备中。
三相异步电动机双速可逆变频调速PLC控制
三相异步电动机双速可逆变频调速PLC控制异步电动机变频调速所要求的变频电源几乎都采用静止式变频器。
利用变频器进行调速控制时,只需改变变频器内部逆变电路换流器件的开关顺序,即可以达到对输出进行换相的目的,很容易实现电动机的正、反转切换。
本文介绍了PLC在三相交流异步电动机变频调速系统方面的设计,说明了系统的控制策略和工作原理,探讨三相异步电动机双速可逆变频调速PLC控制。
1、PLC在三相交流异步电动机变频调速系统设计三相交流异步电动机变频调速系统,以可编程序控制器PLC 作为核心控制部件,通过速度传感器将电动机的转速信号传给PLC, PLC经过控制规律的运算后,给出控制信号,改变电动机输入电压的频率,来调节电动机的转速,从而构成了一个闭环的速度控制系统。
如图1 所示。
2、三相异步电动变频器电路连接的要点2.1变频器前面一定要加接触器输入侧接触器的作用。
一般说来,在断路器和变频器之间,应该有接触器。
a. 可通过按钮开关方便地控制变频器的通电与断电。
b. 发生故障时可自动切断变频器电源,如:变频器自身发生故障,报警输出端子动作时,可使接触器KM迅速断电,从而使变频器立即脱离电源。
另外,当控制系统中有其他故障信号时,也可迅速切断变频器电源。
2.2变频器与电动机之间是否接输出接触器并不要求和工频进行切换时,变频器与电动机接触器,则有可能在变频器的输出频率较高的致变频器跳闸。
a. 当一台变频器只控制一台电动机,且并不要求和工频进行切换时,变频器与电动机之间不要接输出接触器。
因为如果接入了输出接触器,则有可能在变频器的输出频率较高的情况下启动电动机,产生较大的启动电流,导致变频器跳闸。
b. 必须接输出接触器的情况有两种:当一台变频器接多台电动机时,每台电动机必须要有单独控制的接触器。
另外,在变频和工频需要切换的情况下,当电动机接至工频电源时,必须切断和变频器之间的联系。
通用变频器,一般都是采用交、直、交的方式组成,利用普通的电网电源运行的交流拖动系统,为了实现电动机的正、反转切换,必须利用触器等装置对电源进行换相切换。
(完整word版)《交流调速系统》课后习题答案
《交流调速系统》课后习题答案第 5 章 闭环控制的异步电动机变压调速系统5-1 异步电动机从定子传入转子的电磁功率m P 中,有一部分是与转差成正比的转差功率s P ,根据对s P 处理方式的不同,可把交流调速系统分成哪几类?并举例说明。
答:从能量转换的角度上看,转差功率是否增大,是消耗掉还是得到回收,是评价调速系统 效率高低的标志。
从这点出发,可以把异步电机的调速系统分成三类 。
1)转差功率消耗型调速系统:这种类型的全部转差功率都转换成热能消耗在转子回路中,降电压调速、转差离合器调速、转子串电阻调速都属于这一类。
在三类异步电机调速系统中,这类系统的效率最低,而且越到低速时效率越低,它是以增加转差功率的消耗来换取转速的降低的(恒转矩负载时)。
可是这类系统结构简单,设备成本最低,所以还有一定的应用价值。
2)转差功率馈送型调速系统:在这类系统中,除转子铜损外,大部分转差功率在转子侧通 过变流装置馈出或馈入,转速越低,能馈送的功率越多,绕线电机串级调速或双馈电机调速属于这一类。
无论是馈出还是馈入的转差功率,扣除变流装置本身的损耗后,最终都转化成 有用的功率,因此这类系统的效率较高,但要增加一些设备。
3)转差功率不变型调速系统:在这类系统中,转差功率只有转子铜损,而且无论转速高低,转差功率基本不变,因此效率更高,变极对数调速、变压变频调速属于此类。
其中变极对数 调速是有级的,应用场合有限。
只有变压变频调速应用最广,可以构成高动态性能的交流调速系统,取代直流调速;但在定子电路中须配备与电动机容量相当的变压变频器,相比之下,设备成本最高。
5-2 有一台三相四极异步电动机,其额定容量为5.5kW ,频率为50Hz ,在某一情况下运行,自定子方面输入的功率为6.32kW ,定子铜损耗为341W ,转子铜损耗为237.5W ,铁心损耗为167.5W ,机械损耗为45W ,附加损耗为29W ,试绘出该电动机的功率流程图,注明各项功率或损耗的值,并计算在这一运行情况下该电动机的效率、转差率和转速。
交流异步电动机矢量控制调速系统设计

目录摘要I1绪论11.1交流调速技术概况11。
2异步电动机矢量控制原理22矢量控制理论42.1矢量控制42.2异步电机的动态数学模型52.3坐标变换73矢量控制系统硬件设计93。
1矢量控制结构框图93.2矢量控制系统的电流闭环控制方式思想9 3。
3各个子系统模块103.4矢量控制的异步电动机调速系统模块124 SIMULINK仿真134.1MATLAB/S IMULINK概述134。
2仿真参数134。
3仿真结果145总结16参考文献17摘要异步电机的物理模型之所以复杂,关键在于各个磁通间的耦合。
本设计把异步电动机模型解耦成有磁链和转速分别控制的简单模型,就可以模拟直流电动机的控制模型来控制交流电动机。
综合矩阵变换的控制策略及异步电动机转子磁场定向理论,采用计算机仿真方法分别建立了矩阵变换仿真模型以及基于矩阵变换的异步电动机矢量控制系统仿真模型,对矩阵变换的控制原理、输入、输出性能以及矢量控制系统的优质的抗扰能力及四象限运行特性进行分析验证,展现了该新型交流调速系统的广阔发展前景,并针对基于矩阵变换的异步电动机矢量控制系统的特点,着重对矢量控制单元进行了软件设计。
直接矢量控制就是一种优越的交流电机控制方式,它模拟直流电机的控制方式使得交流电机也能取得与直流电机相媲美的控制效果.本文研究了矢量控制系统中磁链调节器的设计方法。
并用MATLAB最终得到了仿真结果。
关键词:坐标变换;矢量控制;MATLAB/simulink1绪论1.1交流调速技术概况工农业生产、交通运输、国防军事以及日常生活中广泛应用着电机传动,其中很多机械有调速要求,如车辆、电梯、机床及造纸机械等,而风机、水泵等为了减少损耗,节约电能也需要调速。
过去由于直流调速系统调速方法简单、转矩易于控制,比较容易得到良好的动态特性,因此高性能的传动系统都采用直流电机,直流调速系统在变速传动领域中占统治地位。
但是直流电机的机械接触式换向器结构复杂、制造成本高、运行中容易产生火花、需要经常的维护检修,使得直流传动系统的运营成本很高,特别是由于换向问题的存在,直流电机无法做成高速大容量的机组,如目前3000转/分左右的高速直流电机最大容量只有400千瓦左右,低速的也只能做到几千千瓦,远远不能适应现代生产向高速大容量化发展的要求.交流电机高效调速方法的典型是变频调速,它既适用于异步电机,也适用于同步电机.交流电机采用变频调速不但能实现无极调速,而且根据负载的特性不同,通过适当调节电压和频率之间的关系,可使电机始终运行在高效区,并保证良好的动态特性。
基于交流电动机动态模型的直接矢量控制系统的仿真与设计
基于交流电动机动态模型的直接矢量控制系统的仿真与设计姓名:班级:电气三班学号:专业:电气工程及其自动化1.引言异步电机的动态数学模型是一个高阶、非线性、强耦合的多变量系统,通过坐标变换,可以使之降阶并化简,但并没有改变其非线性、多变量的本质。
需要高动态性能的异步电机调速系统必须在其动态模型的基础上进行分析和设计,但要完成这一任务并非易事。
经过人们的多年的潜心研究和实践,有几种控制方案已经获得了成功的应用,目前应用最广的就是矢量控制系统。
直接矢量控制就是一种优越的交流电机控制方式,它模拟直流电机的控制方式使得交流电机也能取得与直流电机相媲美的控制效果。
本文研究了交流电动机动态模型的直接矢量控制系统的设计方法。
并用MATLAB 最终得到出仿真结果。
2. 矢量控制系统结构异步电动机经过坐标变换可以等效成直流电动机,那么,模仿直流电动机的控制策略,得到直流电动机的控制量,再经过相应的坐标反变换,就能够控制异步电动机了。
由于进行坐标变换的是电流(代表磁动势)的空间矢量,所以这样通过坐标变换实现的控制系统就称为矢量控制系统(VectorControlSystem),简称VC 系统。
VC 系统的原理结构如图1所示。
图中的给定和反馈信号经过类似于直流调速系统所用的控制器,产生励磁电流的给定信号*m i 和电枢电流的给定信号*t i ,经过反旋转变换1-VR 一得到*αi 和*βi ,再经过2/3变换得到*A i 、*B i 和*C i 。
把这三个电流控制信号和由控制器得到的频率信号1ω加到电流控制的变频器上,所输出的是异步电动机调速所需的三相变频电流。
图1 矢量控制系统原理结构图在设计VC 系统时,如果忽略变频器可能产生的滞后,并认为在控制器后面的反旋转变换器1-VR 与电机内部的旋转变换环节VR 相抵消,2/3变换器与电机内部的3/2变换环节相抵消,则图1中虚线框内的部分可以删去,剩下的就是直流调速系统了。
可以想象,这样的矢量控制交流变压变频调速系统在静、动态性能上完全能够与直流调速系统相媲美。
第6章交流异步电动机调速系统

结论: 结论:
基频f 以下调速,Φ 基频fN以下调速,Φm恒定,转矩恒定,即恒转矩调速; 基频f 以上调速,n 基频fN以上调速,n升高时转矩降低,即恒功率调速;
§6.3.3 异步电动机电压—频率协调控制时 异步电动机电压— 的机械特性
一、恒压恒频正弦波供电时异步电动机的机械特性 一、恒压恒频正弦波供电时异步电动机的机械特性 二、基频以下电压— 二、基频以下电压—频率协调控制时的机械特性 三、基频以上恒压变频调速时的机械特性 三、基频以上恒压变频调速时的机械特性
§6.3.1 VVVF调速的基本原理 VVVF调速的基本原理
由式, 由式 n1 = 当极对数p不变时,同步转速n 当极对数p不变时,同步转速n1与电源频率 f1成正比,f1可以向上(大于fN)也可以向下(小于fN)。 成正比,f 可以向上(大于f )也可以向下(小于f
60 f1 p
三相异步电动机定子每相电动势的有效值:
sm =
Rr'
' Rs2 + ω12 ( L1s + L1r ) 2
Te max =
3n pU s2
' 2ω1 [ Rs + Rs2 + ω12 ( L1s + L1r ) 2 ]
对上面两式分析:改变U 对上面两式分析:改变Us ①同步转速n1不变(因为 n1 = 同步转速n 不变( ) Te ∝ U s2 ,即转矩随电压的平方而改变。 ② 即转矩随电压的平方而改变。 ③最大转差率sm(或额度转差率sN)不变。因为sm与Us 最大转差率s 或额度转差率s 不变。因为s 无关。 无关。
60 f1 p
不同U 不同Us下感应电动机的机械特性
从上图看出, 从上图看出 , 当负载一定时: TL=C,则三个电压下的转速为 A,B,C. A,B,C. 结论:调速范围小! 结论:调速范围小!
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
文 The design of ac asynchronous motor speed closed-loop control system is introduced several major components, and emphatically
expounds the three-phase ac asynchronous motor, frequency converter, PLC (programmable controller programmable logic controller) of
交流异步电动机转速闭环控制系统设计
院 、 部: 电气与信息工程学院
文
1.0%(94)
是否引证:否
管
0.8%(78)
是否引证:否
理
系
统
学生姓名: 刘泰波
指导教师1: 邓宝燕职称工程师
指导教师2: 职称
专业: 电气工程及其自动化
班级: 电气本1205班
完成时间: 2016年5月15日
-2-
摘要
交流异步电机具有结构简单、制造容易、维护检修工作量小等一系列优点,在早期多用于不可拖动领域。伴随着电力电子科 技技术不断发展,和静止式变频器出现,交流异步电机在可拖动领域当中逐步得到了普遍的实际应用。实现电机的调速有很多 方法。探究异步电动机的调速,寻求符合实际情况调速方法能够最大的限度节省资源,因此探究控制调速就显得很有一定的必 要。交流异步电机转速闭环控制是一种比较简便实用的调速系统,这个系统其拥有优异的运行、控制及经济性能,彰显了庞大 的技术开发潜力。
range of speed variable used as a negative feedback loop control system can solve this problem, make the speed regulating performance
fully improved.
Finally, after theoretical analysis and establish the model, simulation software based on kingview man-machine interface development, and debugging simulation experiment, and the simulation results are in a certain analysis and improvement.
理
13.7%(1007) 交流异步电动机转速闭环控制系统设计_第2部分(总7333字)
系
(注释: 无问题部分
文字复制比部分
引用部分)
统
1. 交流异步电动机转速闭环控制系统设计_第1部分
相似文献列表 文字复制比:19.5%(1873) 剽窃观点:(动药片装瓶控制系统 赵树清 - 《大学生论文联合比对库》- 2015 3 基于PLC的自动药片装瓶控制系统 赵树清 - 《大学生论文联合比对库》- 2015 4 地毯簇绒机底布喂入张力控制和纠偏系统研究 王治平(导师:孟婥) - 《东华大学硕士论文》- 2007 5 基于s7-200交流闭环及远程监控系统 沈泽宇 - 《大学生论文联合比对库》- 2015
thus to explore the control speed regulation is very necessary. Ac asynchronous motor speed closed-loop control is a relatively simple
论 and practical control system, this system has good operation, control and economic performance, reveals the huge potential of technology
3.2%(311)
张铖 - 《大学生论文联合比对库》- 2014
是否引证:否
8 湖南工学院毕业设计 张铖
3.1%(301)
张铖 - 《大学生论文联合比对库》- 2014
是否引证:否
9 基于PLC的模糊控制变频调速系统
3.0%(292)
邵杰(导师:初学导) - 《曲阜师范大学硕士论文》- 2006
是否引证:是
知
时间范围: 1900-01-01至2016-05-26 指导教师 邓宝燕
网
检测结果
”
总文字复制比:17%
大
去除引用文献复制比:15.2%
学 去除本人已发表文献复制比:17%
生 单篇最大文字复制比:8.2%(PLC控制的变频调速系统设计-)重复字数: [2880]
总字数:
[16953]
单篇最大重复字数:
10 曹迪_基于PLC的自动门控制系统设计
2.7%(260)
曹迪 - 《大学生论文联合比对库》- 2015
是否引证:否
11 湖南工学院毕业设计 张铖1
2.4%(230)
张铖 - 《大学生论文联合比对库》- 2014
是否引证:否
12 毕业_555444_设计改稿
“ 毕业 - 《大学生论文联合比对库》- 2014
13 PLC在数据采集系统中的应用
中 马永奎 - 《大学生论文联合比对库》- 2014
14 郑文君_471_T69镗床毕业论定稿版
国 郑文君 - 《大学生论文联合比对库》- 2014
15 T69镗床的PLC控制系统设计
知 郑文君 - 《大学生论文联合比对库》- 2014 网 16 基于PLC模糊控制的桥式起重机变频调速系统的研究
此次设计介绍了交流异步电机转速闭环控制系统的几大组成部分,并且着重阐述了三相交流异步电动机、变频器、(可编程
控制器 programmable logic controller)的简单的工作原理。在探究转速闭环控制基本原理的基础上,研究出了交流异步电机单
闭环转速系统结构原理图。还将具体分析本次实验器件选择方案的优缺点,叙述课题的硬件软件设计内容,介绍各个器件的详
1.0%(94)
是否引证:否
21 111 韩旭 - 《大学生论文联合比对库》- 2013
论
1.0%(94)
是否引证:否
22 基于组态软件的PLC电梯控制仿真 盛云 - 《大学生论文联合比对库》- 2013
23 基于DCS的炼厂除氧系统控制设计与实现 李庆祝(导师:赵辉;石永杰) - 《电子科技大学硕士论文》- 2015 原文内容 2016届毕业设计说明书(论文)
章程(导师:程文明) - 《西南交通大学硕士论文》- 2008
17 感应电机磁链观测器-祝立 祝立 - 《大学生论文联合比对库》- 2014
”
18 郑文君_21554_T69镗床毕业论文正文 郑文君 - 《大学生论文联合比对库》- 2014
大
19 电气本0904谭剑高精度多路AD采集系统的设计 谭剑 - 《大学生论文联合比对库》- 2013
motor to drag field gradually widely practical application. There are so many ways to achieve motor speed control. To explore the speed
生 regulation of asynchronous motor, seek to conform to the actual situation speed regulation method can maximum limit to save resources,
管 simple working principle. In the inquiry speed closed-loop control, on the basis of basic principle, research out of the ac asynchronous 理 motor single closed-loop speed system structure diagram. Will also be a concrete analysis the advantages and disadvantages of this 系 experiment device options, hardware and software design contents of narrative subject, introduce details of each device. 统 Single closed-loop speed control system, for example, if you choose to motor speed control, speed control system is the smallest, the
学
20 111 丁翔 - 《大学生论文联合比对库》- 2013
生
1.7%(166)
是否引证:否
1.7%(166)
是否引证:否
1.5%(143)
是否引证:否
1.5%(143)
是否引证:否
1.3%(123)
是否引证:否
1.1%(109)
是否引证:否
1.1%(107)
是否引证:否
1.1%(104)
是否引证:否
-1-
总字数:9620
9.2%(885)
是否引证:否
4.0%(382)
是否引证:否
4.0%(382)
是否引证:否
3.4%(330)
是否引证:否
3.4%(330)
是否引证:否
3.2%(311)
6 湖南工学院毕业设计 张铖
张铖 - 《大学生论文联合比对库》- 2014