六自由度测试系统
基于INtime的六自由度运动平台实时测控系统
·珒 f( 珗 an )
T 珗 an = [ X, Y, Z, ψx , ψy , ψz] n 珒 a n 为平台位姿, f( 珗 a n ) 为选取的迭代式。 其中: 珗
2
软件设计
XZY 为下平台体坐标系( 静 建立欧拉坐标系如图 2 所示, x1 y1 z1 为上平台体坐标系, 坐标系) , 设上铰点在 x1 y1 z1 坐标系 珗 珗 珗 C 中的坐标为 A i , 下铰点在 XYZ 坐标系中的坐标为 B i, i 为上 珒 l i 为上下平台两铰点之间 平台质心在 XYZ 坐标系中的坐标, 的长度向量, 以上 i = 1 ~ 6 。 珗+ T' A 珗 珗 其中 T' 为转移矩阵, li = C 根据几何关系, 有珒 i - Bi , f( 珗 a n ) 可表示为: 则选取的迭代式 珒
{
}
控制模型 。 2. 2 Windows 进程 测控系统中, 平台的运动状态需要实时显示, 要准确得到 可以安装高精度的传感器, 但限于成本, 目前常 平台的位姿, 采用容易测量的液压缸的伸缩量来计算平台的位姿, 即六自 正解算法相对于反解算法( 即已知平 由度平台位姿正解法, 台位姿计算液压缸伸缩量) 计算量大、 迭代复杂, 但由于其实 时性要求不高, 因此将正解算法由 Windows 进程进行解算。 Raphson 迭代法[8] 。 其迭代 本文采用的正解算法是 Newton步骤为: 珗 a n +1 = 珗 an - f( 珗 a ) [ 珒 a ] 珗
Abstract: As for six Degree Of Freedom ( DOF) platform, its inspection and control system should not only meet the requirement for realtime control, but also has powerful graphic interface. Because of the disadvantages of the existing system, this paper designed a realtime inspection and control system which can meet both requirements in an industrial computer based on INtime. In this system, the method of direct operating on data acquisition and control cards was adopted by INtime process, to obtain realtime performance; in the meantime, nonrealtime tasks were handled by Windows process. The test results of real running demonstrate that the system has high realtime performance, and the animation of platform in user interface is rendered fluently, and verifies the feasibility and effectiveness of the system. Key words: INtime; realtime; inspection and control system; six Degree Of Freedom ( DOF) platform
六自由度平台控制流程
六自由度平台控制流程
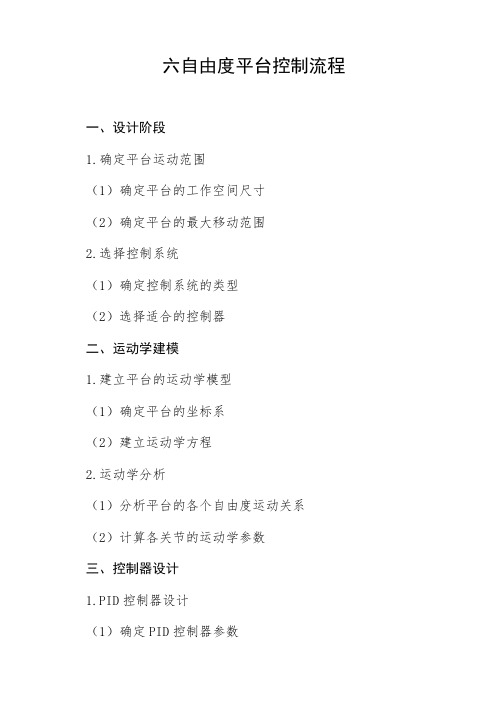
一、设计阶段
1.确定平台运动范围
(1)确定平台的工作空间尺寸
(2)确定平台的最大移动范围
2.选择控制系统
(1)确定控制系统的类型
(2)选择适合的控制器
二、运动学建模
1.建立平台的运动学模型
(1)确定平台的坐标系
(2)建立运动学方程
2.运动学分析
(1)分析平台的各个自由度运动关系
(2)计算各关节的运动学参数
三、控制器设计
1.PID控制器设计
(1)确定PID控制器参数
(2)进行闭环控制设计
2.轨迹规划
(1)设计平台的运动轨迹
(2)确定平台的运动速度和加速度
四、软硬件实现
1.编写控制程序
(1)使用编程语言编写控制算法(2)软件实现运动控制
2.硬件连接
(1)连接传感器和执行器
(2)配置控制器和驱动器
五、系统调试
1.运动测试
(1)进行平台的手动控制测试
(2)检查各个自由度的运动是否正常2.控制效果验证
(1)进行自动控制测试
(2)验证控制效果和精度
六、性能优化
1.参数调整
(1)调整控制器参数
(2)优化控制算法
2.系统稳定性分析
(1)进行系统稳定性分析(2)确保平台运动稳定可靠。
基于NI实时控制器的六自由度平台测控系统设计与实现
基于NI实时控制器的六自由度平台测控系统设计与实现王效亮;张芳;曾宪科;栾婷;陈成峰【摘要】六自由度平台测控系统是六自由度平台的电气控制部分,它通过对六路液压缸的实时闭环控制,实现对平台位姿的控制;该测控系统采用NI的计算机,配置多种类型的PXI板卡,实现了对平台的电压、电流、数字IO、CAN总线等多种接口类型的测量和控制,满足了可靠性需求;采用了典型的上下位机控制,分别进行实时计算与任务管理,解决了实时性的控制需求;采用NI的虚拟仪器Labview开发测控软件,完成实时计算平台的正解与反解模块,作动器闭环控制等功能,增强系统的功能和灵活性;目前六自由度平台测控系统的硬件部分和软件部分都已经通过了调试,对系统进行了正弦运动和暂态特性测试,实验结果表明,运行速度快,满足了平台的控制要求.【期刊名称】《计算机测量与控制》【年(卷),期】2019(027)002【总页数】6页(P24-28,33)【关键词】六自由度平台;软件;SIT仿真模型【作者】王效亮;张芳;曾宪科;栾婷;陈成峰【作者单位】北京精密机电控制设备研究所,北京 100081;北京精密机电控制设备研究所,北京 100081;北京精密机电控制设备研究所,北京 100081;北京精密机电控制设备研究所,北京 100081;北京精密机电控制设备研究所,北京 100081【正文语种】中文【中图分类】TP273+.50 引言六自由度平台是一种模拟航天器空间运动姿态的模拟器,在其行程范围内可以模拟任意空间运动。
六自由度是平台具有六个自由运动的维度,即纵向、升降、横向、俯仰、横滚、偏航[1]。
通过对6个液压作动器的精确控制和解藕算法,实现对平台的6个自由度的位姿控制。
其系统示意图如图1所示。
图1 六自由度平台示意图六自由度运动平台可以实现对既定的轨迹的跟踪,作为运动仿真平台有着广泛的应用:1)可以作为航空飞行模拟器;2)可以作为机器人的模拟运动机构;3)在娱乐界可以作为体感模拟娱乐机;4)用作飞机、船舶、潜艇、航天器等运动载体中相关仪器设备的试验。
六自由度运动平台设计方案
六自由度运动平台设计方案1概述YYPT原理样机用原库房留存的345厂的直流电机作为动力源,直流驱动器及工控机作为控制系统元件,采用VB软件进行控制软件的编制,因设计及器件选型的原因,导致YYPT原理样机,在速度、精度、运动规律上等几个技术指标无法满足原规定的指标要求,现在此基础上进行优化方案的设计。
2原理样机技术状态2.1原理样机方案2.1.1组成原理样机采用工控机作为系统的控制单元,工控机内配有研华PCI1716和PCI1723作为A/D和D/A模拟量卡,驱动器采用AMC公司的型号为12A8的伺服驱动器,并配有直流可调电源其输出电流可达到150A,采用KH08XX(3)电动缸作为运动平台的六条支腿,电动缸上安装有电阻尺作为位置反馈器件,上平台与电动缸连接采用球笼联轴器,下平台与电动缸连接采用虎克铰链方式。
具体产品组成表见表2.1。
2.1.2结构方案六自由度运动平台是由六条电动缸通过虎克铰链和球笼万向节联轴器将上、下两个平台连接而成,下平台固定在基础上,借助六条电动缸的伸缩运动,完成上平台在三维空间六个自由度(X,丫,Z,a,B, 丫)的运动,从而可以模拟出各种空间运动姿态。
图1六自由度平台外形图a)球笼联轴器(如图2所示)采用球笼铰链与上平面连接。
球笼铰链结构简单、体积小、运转灵活、易于维护。
初选球笼铰链型号BJB (JB/T6139-1992),公称转矩Tn=2000N/m,工作角度40度,外径D=68mm,轴孔选用圆柱孔d=24mm,总长度L1=148mm ,转动惯量为0.00008kg.m2,重量5kg。
图2球笼联轴器b)虎克铰链(如图3所示)采用虎克铰链与下平面连接。
万向节铰链传动效率高,允许两轴间的角位移大,适用于有大角位移的两轴之间的连接,一般两轴的轴间角最大可达35o~45o,噪音小,对润滑要求不高,传递转矩大,而且使用可靠,因此获得广泛的应用。
图3虎克铰链F固定板的连接(如图4所示)F 固定板与电动缸用法兰连接初选深沟球轴承型号61808 (GB/T276-1994),额定载荷 Cr=5.1kN ,外径D=52mm ,轴承孔选用 d=40mm ,宽 B=7mm ,重量 0.26kg 。
六自由度机械臂系统设计及其关键技术研究

二、关键技术研究
1、控制系统设计与实现
控制系统是六自由度机械臂的核心,直接决定了机械臂的运动性能。常见的控 制系统有基于PC的控制系统、嵌入式控制系统和实时操作系统等。控制系统需 要设计数学模型,并根据数学模型选择合适的控制算法,如PID控制、模糊控 制和神经网络控制等。
2、数据采集与处理技术
近年来,机器学习技术在六自由度机械臂的应用逐渐增多,通过训练机械臂执 行各种任务,可以实现对机械臂的智能控制。例如,采用深度学习算法训练机 械臂抓取物品的位置和姿态,从而实现自动化抓取和搬运。此外,机器学习还 可以用于机械臂的路径规划和运动优化等方面,提高机械臂的工作效率和运动 性能。
三、实验与结果分析
实验与结果分析验证了所设计的六自由度机械臂系统在某些方面具有优越的性 能表现,同时也揭示了未来研究方向和需其关键技术的有效性,需要进行实验设计 与实施。实验应包括自由度数目的选择、运动区域的设定等内容,并要呈现实 验结果和数据分析。例如,可以通过对比实验,分别测试不同自由度数目的机 械臂在速度、精度和稳定性等方面的性能表现。实验结果应包括运动轨迹的展 示和误差分析等,并对实验结果进行总结。
数据采集与处理技术是提高机械臂运动性能的重要手段。通过采集机械臂各关 节的位置、速度和加速度等信息,经过数据处理和反馈控制,可以实现对机械 臂运动的精确控制。数据采集通常采用编码器、陀螺仪和加速度计等传感器, 数据处理则包括数据滤波、补偿和优化等步骤,以提高数据的准确性和可靠性。
3、基于机器学习的运动规划与 智能控制
根据实验结果,可以分析出本研究的优点和不足之处。例如,实验结果显示采 用六个自由度的机械臂具有较高的运动精度和稳定性,但在某些动作的执行上 可能需要更多的时间。此外,实验结果还可能揭示控制系统设计和数据处理技 术对机械臂性能的影响,为未来研究提供参考和改进方向。
六自由度平台
六自由度平台简介六自由度平台是一种具有六个自由度的机械装置,用于模拟某种特定的运动或操作。
它由一个固定的基座和一个可运动的平台组成,平台可以在六个方向上进行运动。
这些方向分别是平移运动的x、y和z轴以及旋转运动的绕x、y和z轴。
工作原理六自由度平台的工作原理基于平台上的六个自由度。
通过控制这些自由度的运动,可以实现平台的任意姿态和位置。
六自由度平台通常由六个执行机构组成,每个执行机构负责控制平台上的一个自由度。
这些执行机构可以是液压马达、电动推杆或转动电机等。
通过改变这些执行机构的运动方式和速度,可以控制平台的姿态和位置。
在六自由度平台上,平台和基座之间通常有一个连接机构。
这个连接机构被设计为可以使平台相对于基座在六个方向上运动,并且能够支持所需的载荷。
常见的连接机构包括球接头、万向节等。
六自由度平台在许多领域都有重要的应用。
以下是一些典型的应用领域:航天航空领域在航天航空领域,六自由度平台可以用于模拟和测试航天器和飞行器的运动和操纵。
通过控制平台的自由度,可以模拟各种姿态和操纵条件,以帮助设计和验证飞行器的控制系统。
机器人领域在机器人领域,六自由度平台可以用于模拟和测试机器人的运动和操作。
通过控制平台的自由度,可以模拟各种机器人的运动和操作场景,以帮助设计和验证机器人的运动控制算法。
模拟训练领域在模拟训练领域,六自由度平台可以用于模拟各种训练场景,如飞行模拟器、驾驶模拟器等。
通过控制平台的自由度,可以模拟各种实际场景下的运动和操作,以帮助训练人员提高技能和应对各种情况。
在医疗领域,六自由度平台可以用于模拟和测试医疗设备的运动和操作。
通过控制平台的自由度,可以模拟各种医疗设备的运动和操作,以帮助医生和护士熟悉设备的使用和操作步骤。
总结六自由度平台是一种具有六个自由度的机械装置,通过控制平台的自由度,可以实现平台的任意姿态和位置。
它在航天航空领域、机器人领域、模拟训练领域和医疗领域等许多领域都有广泛的应用。
六自由度工业机器人的绝对位置测量及运动学标定技术
THANK YOU
感谢聆听
可靠性稳定
绝对位置测量技术具有稳定的可靠性,能够保证机器人在长时间运 行过程中保持稳定的性能。
适用范围广
该技术适用于各种六自由度工业机器人,无需针对特定机器人进行 改造,具有广泛的应用前景。
应用场景与适用范围介绍
01
02
03
04
制造业
六自由度工业机器人广泛应用 于制造业中的焊接、装配、搬 运、喷涂等环节,能够提高生 产效率和降低人工成本。
03
04
1. 采集每个动作下机器人各 关节的位置、速度、加速度数
据。
2. 采集机器人各关节角度的 测量值。
3. 采集机器人运动轨迹的测 量值。
数据处理与分析结果展示
数据处理
01
2. 通过运动学模型对数据进行拟合和计算 ,得到各关节的绝对位置。
03
02
1. 使用MATLAB对数据进行清洗和预处理, 去除异常值。
首先,收集大量的机器人运动数据,并利用这些数据训练一个神经网络 模型。然后,通过该模型,输入机器人的末端执行器的位置和姿态信息 ,输出机器人各关节角度。
应用场景
常用于解决复杂的非线性问题,提高机器人的适应性和灵活性。
04
实验设计与结果分析
实验设备与环境介绍
设备
六自由度工业机器人(ABB IRB1200)、激光跟踪仪(Leica AT901)、反光 标志点、计算机等。
2. 研究工业机器人的运动学标定方法,通过实验获取 机器人的运动学参数;
研究内容与方法
3. 结合实验数据,对 机器人的运动学模型 进行验证和优化。
1. 理论分析和实验验 证相结合;
本研究采用的方法包 括
研究内容与方法
六自由度自动驾驶仿真测试平台搭建及其应用研究

六自由度自动驾驶仿真测试平台搭建及其应用研究目录一、内容描述 (2)1.1 研究背景 (3)1.2 研究目的与意义 (4)1.3 国内外研究现状综述 (5)1.4 论文结构安排 (6)二、六自由度自动驾驶仿真测试平台需求分析 (7)2.1 自动驾驶系统组成与功能需求 (9)2.2 仿真测试平台性能需求 (10)2.3 仿真测试平台硬件需求 (12)2.4 仿真测试平台软件需求 (13)三、六自由度自动驾驶仿真测试平台搭建 (14)3.1 平台总体架构设计 (16)3.2 传感器仿真模块设计与实现 (17)3.3 控制系统仿真模块设计与实现 (18)3.4 通信系统仿真模块设计与实现 (20)3.5 路径规划与决策系统仿真模块设计与实现 (21)3.6 数据处理与存储系统设计与实现 (22)四、六自由度自动驾驶仿真测试平台应用研究 (23)4.1 仿真测试流程设计 (24)4.2 仿真测试方法研究 (26)4.3 仿真测试结果分析 (27)4.4 仿真测试优化建议 (28)五、结论与展望 (29)5.1 研究成果总结 (30)5.2 存在问题与不足 (32)5.3 未来研究方向展望 (33)一、内容描述本文档主要围绕“六自由度自动驾驶仿真测试平台搭建及其应用研究”展开详细的内容描述。
接下来是关于搭建六自由度自动驾驶仿真测试平台的具体内容。
需要确定仿真测试平台的核心硬件和软件组件,包括高性能计算机、图形处理器、仿真软件、自动驾驶算法等。
需要考虑如何搭建这些组件,包括硬件设备的选型与配置、软件的安装与调试等。
环境的构建也是关键的一环,需要模拟各种真实的驾驶场景,包括城市道路、高速公路、山区道路等,以及各种复杂的交通环境,如雨天、雾天、夜间等。
关于应用研究部分,重点将探讨六自由度自动驾驶仿真测试平台在自动驾驶系统研发中的应用。
如何利用该平台对自动驾驶系统进行算法验证和性能评估将是重要内容。
如何通过该平台改进和优化自动驾驶系统也是一个重要的研究方向。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第19卷第4期仪 器 仪 表 学 报V o l.19 №4 1998年8月CH I N ESE JOU RNAL O F SC IEN T IF I C I N STRUM EN T A ug. 1998六自由度测试系统3孙长库 周富强 刘 越 叶声华(天津大学精密测试技术与仪器国家重点实验室 天津 300072)摘要 本文所描述的测试系统基于激光全息分光技术和激光干涉测长技术,同时测定目标物体六个自由度的偏差。
采用激光漂移补偿技术建立了稳定的激光束基准,采用磁光调制技术减小光强不稳定等因素对滚转角测量精度的影响,实现了多自由度较高精度的准直。
实验表明,在激光光源距靶标1m时,该系统Ρ重复性误差:线位移小于4Λm,角位移小于4″,整个系统结构简单,测量效率高。
关键词 六自由度误差 全息透镜 磁光调制 干涉测长1 引 言目前,在国内外相继研制的多自由度测量系统中,大都采用多激光束进行,在光路中加多个分光元件,将单一激光束分为多束作为测量基准,利用每一束光所带的位移信息,采用和一般准直仪相同的测试原理,来测量出各自由度的偏差〔1,2〕。
这种简单的分光方法所分出的光束独立性不好,作为测量基准时,其相对位置精度难以保证,而且多元件的采用使得测试系统的可动部分不易小型化。
近年来出现的双目视觉法六自由度测量系统〔3〕,虽然结构简单,但标定复杂,测量精度难以保证。
本文描述一种利用全息透镜分光和干涉计量的方法,结合激光漂移补偿技术和磁光调制技术同时探测空间物体六自由度偏差,并能保证各被测参数之间的相对独立,实现对空间物体位置精度的动态检测。
2 基本测试原理测试系统结构示意如图1所示,坐标原点确定为全息透镜的中心O。
一准直扩束光束经分光镜分为两束,一束进入干涉系统,被用来测量物体沿Z轴位移。
另一束经磁光调制器后入射到全息透镜,被分为三路:非衍射光束2、会聚光束3和发射光束4,利用这三束光所携带的信息来测量其它五个自由度偏差。
当准直光束中心线以方向角Α、Β、Χ入射到全息透镜的中心时,在菲涅尔近似条件下(Α≈Β3 本文于1996年10月收到。
图1 测试系统原理示意图≈90°,Χ≈0),且只考虑光束所带位置信息,略去时间因子exp (j Ξt ),则通过全息透镜后的透射光波可表示为:E T =C (A 2+B 2)D exp [jk (xco s Α+yco s Β+zco s Χ)]+ABCD exp [-jk (x 2+y 2-2xxF 2F-xco s Α-yco s Β-zco s Χ)]+ABCD exp [jk (x 2+y 2-2xx F 2F+xco s Α+yco s Β+zco s Χ)](1)其中A 为参考光振幅;B 为物光光波的振幅;C 是全息透镜透射系数;D 是照明光波振幅;F =x F 2+z F 2为全息透镜的焦距;co s Α、co s Β、co s Χ是照明光波的方向余弦。
式中第一项为照明光束的继续,可视为原路光束,它被一位置敏感探测器(PSD )接收,其作用同一般激光准直仪一样,可实现光靶与激光束在X 向及Y 向相对位移的测量。
第二项完整地保存了原物光的信息,若为会聚光束,则该光束沿任何方向平移或绕Z 轴相对转动,都不改变全息透镜焦点的相对位置,仅当它与光靶之间有绕X 轴或Y 轴的相对转动时焦点才会移动。
因此该光束在焦点处被另一PSD 接收,便可实现Ηx 、Ηy 的测量。
第三项也保存了原物光的信息,但它与原物光在位相上是共轭的,第二项为会聚光束,则它应该为发散光束,我们将利用它与照相光束具有相同偏振特性的特点实现ΗZ 的测量。
211 沿Z 轴方向相对位移∃Z 的测量采用激光干涉测长的原理,将测量光路中的可动角锥棱镜固定在测量靶标上,靶标置于被测物体上,和一般干涉仪一样,通过读干涉条纹来测定位移。
为提高测量精度,采用移相系统,将干涉条纹分成位相彼此相对移动Π 2的两部分,并把这两部分干涉条纹分别送到两个光电探测器(P I N )上。
两光电探测器输出的电信号彼此也有Π2的位相差,这两路电信号经整形放大及倒相,变成四个矩形脉冲信号,经微分后,得到四个依次相差Π 2的脉冲,对四个脉冲采用可逆计数,得到四倍频脉冲数N ′,于是Z 轴向相对位移由下式求得:∃z =N ′Κ8(2)212 偏摆角Ηx 、俯仰角Ηy 及沿轴X 、Y 向相对位移∃x ,∃y 的测量当Α≈Β≈90°,Χ≈0时,所检测各自由度偏差非常小,建立如图2所示的坐标系。
易推原路光束及会聚光束在两个PSD 上的坐标B (x B ,y B )、B 1(u B 1,v B 1)和照明光束位置信息∃x 、∃y 、Ηx 、Ηy 的近似关系:∃x ≈x B∃y ≈y B (3)363 第4期六自由度测试系统图2 基准激光束与系统坐标系Ηx≈u B 1 x F 2+Z F 2Ηy≈v B 1 z F (4)213 磁光调制测量滚转角ΗZ 基于法拉弟旋光效应〔4〕:Η=V HL (5)其中Η是线偏光旋光角;V 、L 为光学玻璃的旋光系数和几何长度;H 是磁场强度。
激光器发出的一束线偏振光,入射到检偏器时,根据马吕斯定律,出射光强可表示为:I out =I 0co s 2Η。
Η为光束偏振方向和检偏器光轴的夹角。
当光束偏振方向与检偏器光轴正交时,Η可用下式表达: Η=90°+ΗZ +A sin Ξt (6)其中:ΗZ 是滚转角;A 是调制幅度;Ξ是调制频率,于是I out =I 0co s 2(90°+ΗZ +A sin Ξt )=12I 0[1-co s 2ΗZ co s (2A sin Ξt )-sin 2ΗZ sin (2ΗZ sin Ξt )]=C -co s 2ΗZ 6∞k=1J 2k (2A )co s (2k Ξt )+sin 2ΗZ 6∞k=0J 2k+1(2A )sin [(2k +1)Ξt ](7)式中:C =12I 0[1-J 0(2A )co s 2ΗZ ]为直流分量,各项贝塞尔函数J k (2A )的值随k 的增大急剧减小,且只有基波信号才包含我们所关心的滚转角信息,因此滤去直流分量及所有高频信号,光强信号可以表示为:I out =sin (2ΗZ )J 1(2A )sin Ξt -co s (2ΗZ )J 2(2A )co s 2Ξt (8)当ΗZ =0时,即光束偏振方向和检偏器光轴处于正交时,系统工作在极小位置,接收到的信号为调制频率的二倍频信号。
当系统偏离极小位置时,随着ΗZ 的增大,二倍频信号减弱,基频信号增加,并根据基频信号的相位来进行辨向。
利用锁相放大器对输出信号进行相敏整流和积分运算,其输出的直流电压与滚转角大小成比例,根据所测得的直流电压就可以得到滚转角信息。
214 激光漂移补偿器该测试系统在测量Ηx 、Ηy 及沿轴X 、Y 向相对位移时,是以激光束的能量中心为测量基准,其测量精度主要取决于激光束的空间稳定性。
但因激光器谐振腔热变形引起光束偏离理想基准方向,影响激光准直精度,所以在该系统中加入漂移补偿器,以建立稳定的测量基准。
该系统采用一个复合棱镜组,获得稳定的能量中心。
当一束光入射到补偿器后,出射光是由两束能量相等在空间完全对称的光束合成的,当入射光束有漂移时,其两束出射光的合成能量中心仍保持不变。
3 测试实验结果按前文所述原理,在实验室设计了基本测试系统,将测量靶标固定在六自由度工作台上,采用双频激光干涉仪对滚转角进行了标定,并在靶标距光源1m 时对各参数在不同时间对给定位置进行多次实验,获得了系统的重复性误差。
实验表明,线位移重复性误差在Ρ范围内优于4Λm ,角位移优于4″。
同时,我们采用该系统和双频激光干涉仪对滚转角进行了比对实验,结463仪 器 仪 表 学 报 第19卷 果表明,两者测量结果极差小于4″。
4 结 束 语根据上述测试原理和实验分析,利用全息透镜的分光特性附加一干涉测量系统可实现对空间物体六自由度偏差的同时测量。
通过完善和改进,提高测试精度,将研制出的六自由度传感器可直接用于机床导轨、风洞天平体轴加载的自动校测等多个自由度的准直和微小偏移量的测量。
此方法在保证精度的同时将系统简单化和小型化,开拓了多自由度测试的新方法。
参考文献1 J .N i ,S .M .W u .L aser alignm en t techn iques fo r si m u lataneou s m ach ine too l geom etric erro r detec 2ti on .SP IE ,V o l.954Op tical T esting and M etro logy ,1988,694~701.2 Sh in ji SH I M IZ U ,Hw a 2Soo L EE .Si m u lataneou sM easu ring M ethod of T ab le M o ti on E rro rs in 6D e 2grees of F reedom ,In t .J .Japan ,Soc .P recisi on Engineering ,1994,28(3):273~274.3 Ch in E .L in and A nn 2San Hou .R eal 2ti m e Po siti on and A ttitude Sen sing U sing CCD Cam eras in M ag 2netic Su spen si on System A pp licati on s.IEEE T ran s .on In strum en tati on s and M easu rem en t .1995,44(1):8~13.4 R .J .K ing ,K .W .R aine .Po lari m etry app lied to alignm en t and angle m easu rem en t .Op tical Engineer 2ing .1981,20(1):39~42.A Six D egree -of -freedom M ea sur i ng SystemSun Changku Zhou Fuqiang L iu Yue Ye Shenghua(S ta te K ey L ab of P recision M easu ring T echnology &Instrum en ts ,T ianj in U n iversity ,300072)ABSTRACT :B ased on laser ho lograp h ic techn ique and laser in terferom eter gauge m ea 2su ring techn ique ,the m easu ring system described in th is p ap ers ,can si m u ltaneou sly m easu re six degree 2of 2freedom erro rs of the ob ject .T he stab le laser beam πs energy cen ter is set as da 2tum line of th is m easu ring system by u tilizing laser drift com p en sati on techn ique .T he u tiliza 2ti on of the m agneto 2op tic m odu lati on techn ique has reduced the effects of the inciden t ligh t in ten sity variati on s on the accu racy of the ro ll m easu rem en t .O n the basis of these tech 2n iques ,m u lti 2degree 2of 2freedom alignm en t system w ith h igh accu racy is realized .T h rough ac 2tual m easu rem en t ,the rep eatab ility accu racy of the cu rren t system is to be 4Λm fo r linear dis 2p lacem en t m easu rem en t erro rs and better than 4″fo r angu lar m easu rem en t erro rs w ith a 1moffset betw een laser and a p ho toelectric receiving target .T he w ho le m easu ring system is characterized of si m p le structu re and efficien t m easu ring .KEY WORD S :Six degree 2of 2freedom erro rs ,Ho lo len s ,M agneto 2op tic m odu lati on ,In ter 2ferom eter guage m easu ring .563 第4期六自由度测试系统。