ROCKHILL导波雷达操作手册
洛雷数字录像机系列LHV2000用户手册说明书
HDMI
Rallonge*
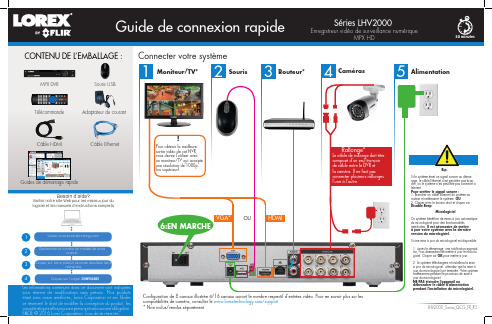
Le câble de rallonge doit être composé d’un seul tronçon de câble entre le DVR et la caméra. Il ne faut pas connecter plusieurs rallonges l’une à l’autre.
Configuration de 8 canaux illustrée 4/16 canaux auront le nombre respectif d'entrées vidéo. Pour en savoir plus sur les compatibilités de caméra, consulter le /support
Micrologiciel
Ce système bénéficie de mises à jour automatique du micrologiciel pour des fonctionnalités améliorées. Il est nécessaire de mettre à jour votre système avec la dernière version du micrologiciel.
Guide de connexion rapide
Séries LHV2000
Enregistreur vidéo de surveillance numérique MPX HD
30 minutes
CONTENU DE L’EMBALLAGE :
MPX DVR
Souris USB
Connecter votre système
!
导波雷达说明书

导波雷达物位计测量原理导波雷达是基于时间行程原理的测量仪表,雷达波以光速运行,运行时间可以通过电子部件被转换成物位信号。
探头发出高频脉冲并沿缆绳传播,当脉冲遇到物料表面时反射回来被仪表内的接收器接收,并将距离信号转化为物位信号。
输入反射的脉冲信号沿缆绳传导至仪表电子线路部分,微处理器对此信号进行处理,识别出微波脉冲在物料表面所产生的回波。
正确的回波信号识别由智能软件完成,距离物料表面的距离D与脉冲的时间行程T成正比:D=C×T/2其中C为光速因空罐的距离E已知,则物位L为:L=E-D输出通过输入空罐高度E(=零点),满罐高度F(=满量程)及一些应用参数来设定,应用参数将自动使仪表适应测量环境。
对应于4-20mA输出。
产品简介:测量范围说明:H----测量范围L----空罐距离B----顶部盲区E----探头到罐壁的最小距离顶部盲区是指物料最高料面与测量参考点之间的最小距离。
底部盲区是指缆绳最底部附近无法精确测量的一段距离。
顶部盲区和底部盲区之间是有效测量距离。
注意:只有物料处于顶部盲区和底部盲区之间时,才能保证罐内物位的可靠测量。
下述的安装指南适用于缆式和杆式探头测量固体颗粒料和液体物体。
同轴管式探头只适用于液体物体。
安装位置:尽量远离出料口和进料口。
对金属罐和塑料罐,在整个量程范围内不碰壁。
如果是金属罐,物位仪表不要安装在罐的中央。
建议安装在料仓直径的1/4处。
缆式探头或杆式探头离罐壁最小距离不小于30厘米。
探头底部距罐底大约30mm。
探头距罐内障碍物最小距离不小于200mm。
如果容器底部是锥型的,传感器可以安装罐顶中央,这样可以一直测量到罐底。
右图为杆式雷达安装图,主要用于液体液位的测Array量。
特点:可以测量介电常数大于等于1.4的任何介质。
一般用于测量粘度≤500cst而且不容易产生粘附的介质。
杆式雷达最大量程可以达到6米。
对蒸汽和泡沫有很强的抑制能力,测量不受影响。
对于介电常数比较小的液体物料可以采用双探杆式测量方式,以保障良好的准确测量。
雷达操作手册
操作说明书FAR-28x7系列FAR-21x7(-BB)系列海华公司内部资料目 录1. RADAR OPERATION雷达操作 (1)1.1 Turning on the Power打开电源 (1)1.2 Transmitter ON发射 (1)1.3 Control Uuit控制单元 (1)1.4 Main Menu主菜单 (1)1.5 Operation Using the On-Screen Boxes屏幕上的操作 (2)1.6 CURSOR Menu光标菜单 (3)1.7 Monitor Brilliance 屏幕亮度 (3)1.8 Choosing the Display Mode选择显示模式 (3)1.9 ON-Screen Boxes and Markers屏幕上的方框和标记 (4)1.10 Tuning the Receiver调谐接收机 (4)1.10.1 Choosing the tuning method选择调谐方式 (4)1.10.2 Initializing tuning初始化调谐 (4)1.10.3 Automatic tuning自动调谐 (5)1.10.4 Manual tuning手动调谐 (5)1.11 Aligning Heading with Gyrocompass调整船首向 (5)1.12 Presentation Modes 显示模式 (5)1.12.1 Choose presentation mode选择显示模式 (6)1.12.2 Description of presentation modes 显示模式介绍 (6)1.13 Entering Own Ship’s Speed输入本船速度 (6)1.13.1 Automatic speed input by log or GPS navigator从计程仪或GPS自动输入速度 (7)1.13.2 Manual speed input手动输入速度 (7)1.14 Choosing the Range Scale选择量程 (7)1.15 Choosing the Pulselength选择脉冲长度 (8)1.15.1 Choosing pulselength 选择脉冲长度 (8)1.15.2 Changing pulselength 改变脉冲长度 (8)1.16 Adjusting the Sensitivity 调节灵敏度 (9)1.17 Suppressing Sea Clutter 抑制海浪干扰 (9)1.17.1 Choosing method of adjustment 选择调节方法 (9)1.17.2 Automatic adjustment by the A/C SEA control调节海浪抑制 (9)1.18 Suppressing Rain Clutter 抑制雨水干扰 (9)1.18.2 Adjusting A/C RAIN调节雨水干扰 (10)1.19 Interference Rejector 干扰抑制器 (10)1.20 Measuring the Range 测量量程 (11)1.20.1 Turning range rings on/off 开/关范围圈 (11)1.20.2 Measuring range by variable range marker(VRM)利用可变距离刻度测量范围 (12)1.20.3 Choosing VRM unit of measurement(B,C and W types)选择VRM度量刻度 (13)1.21 Measuring the Bearing测量方位 (13)1.21.1 Measuring the bearing测量方位 (13)1.21.2 Choosing true or relative bearing选择真方位或相对方位 (14)1.22 Collision Assessment by Offset EBL利用电子方位线估算碰撞 (14)1.22.1 How to assess risk of collision by the offset EBL利用EBL估算碰撞危险 (15)1.23 Measuring Range and Bearing Between Two Targets测量两个目标距离和方位键盘 (15)1.24 Setting a Target Alarm设置目标报警 (16)1.24.1 How to set a target alarm zone怎样设置目标警报区域 (16)1.24.2 Acknowledging the target alarm确认目标报警 (17)1.24.3 Deactivating a target alarm解除目标报警 (17)1.24.4 Target alarm attributes目标报警属性 (17)1.25 Off-entering the Display 关闭中心显示 (18)1.26 Echo Stretch 回波放大 (19)1.27 Echo Averaging回波平均值 (19)1.28 Target Trails目标轨迹 (20)1.28.1 True or relative trails真运动或相对运动轨迹 (20)1.28.2 Trail time轨迹时间 (20)1.28.3 Trail gradation轨迹级别 (21)1.28.4 Saving, copying target trails保存,复制目标轨迹 (21)1.28.5 Trail level轨迹级别 (21)1.28.6 Narrow trails(B,C and W types)使轨迹变窄 (21)1.28.7 Longer trails(B,C and W types)使轨迹更长 (22)1.28.8 Removing trails from the display temporarily临时删除轨迹 (22)1.28.9 Erasing trails消除轨迹 (22)1.29 Parallel Index Lines并行索引线 (22)1.29.1 Displaying, erasing parallel index lines显示,消除并行索引线 (23)1.29.2 Adjusting index line orientation, index line interval调整索引线方位和间隔 (23)1.29.3 Index line bearing reference索引线方位基准 (24)1.29.4 Choosing maximum number of index lines to display选择显示最大数量索引线 (24)1.29.5 Index line mode索引线模式 (25)1.30 Origin Mark原点标记 (25)1.30.1 Entering origin marks输入;原点标记 (25)1.30.2 Origin mark stabilization原点标记稳定性 (26)1.30.3 Deleting individual origin marks删除个别原点标记 (26)1.31 Zoom放大 (26)1.32 Markers标记 (27)1.32.1 Heading marker and heading line航向标记和航向线 (27)1.32.2 Stern marker船尾标记 (28)1.32.3 North marker向北标记 (28)1.32.4 Own ship symbol本船符号 (28)1.32.5 Barge marker闯入目标标记 (28)1.33 Automatic Picture Setup According to Navigation Purpose根据航行目的自动设置雷达 (29)1.34 Programming Function Keys 设计功能键 (29)1.34.1 Activating a function key激活功能键 (30)1.34.2 Programming the function keys设置功能键 (30)1.35 Ship’s Position 本船位置 (31)1.36 Noise Rejector抑制噪声 (31)1.37 Suppressing Second-trace Echoes抑制二次回波 (32)1.38 Adjusting Brilliance of Screen Data调整屏幕亮度 (32)1.39 Watch Alarm监视报警 (32)1.40 Setting Up Nav Data设置导航数据 (33)1.41 Text Window Setup文本窗口设置 (33)1.42 Customizing Operation自定义操作 (34)1.43 Alarms报警 (35)1.44 Choosing the Antenna, Displaying Antenna Information选择天线、显示天线信息 (35)1.44.1 Choosing the antenna选择天线 (35)1.44.2 Displaying antenna information显示天线信息 (35)1.45 Cursor Data光标数据 (35)1.46 Performance Monitor性能监视器 (36)1.47 Wiper擦除器 (36)1.48 Own Ship Symbol本船记号 (36)1.49 Color and Brilliance Sets颜色和亮度设置 (36)1.49.1 Choosing color and brilliance set选择颜色和亮度设置 (37)1.49.2 Presetting color and brilliance set预设颜色和亮度 (37)1.50 Reference Point for CPA/TCPA CPA/TCPA参考点 (37)1.51 Switching Hub HUB-100(option) (37)2.RADAR OBSERVATION (38)3.ARP OPERATION ARP操作 (38)3.1 Usage Precautions使用注意点 (38)3.2 Controls for ARP ARP控制键 (38)3.3 Activating, Deactivating ARP激活,静默ARP (38)3.4Entering Own Ship's Speed输入本船速度 (39)3.4.1 Echo-referenced speed input回波基准速度 (39)3.5 Automatic Acquisition自动获取 (40)3.5.1 Enabling auto acquisition 启动自动获取 (40)3.5.1 Terminating tracking of targets(including reference targets)终止目标追踪(包括参考目标) (41)3.6 Manual Acquisition手动获取 (42)3.6.1 Setting manual acquisition conditions设置手动获取条件 (42)3.6.2 Manually acquiring a target手动获取目标 (42)3.7 ARP Symbols and ARP Symbol Attributes ARP形状及特性 (42)3.7.4 Symbols color and size形状的颜色和大小 (42)3.7.5 Auto target track(A,B,C and W types)自动目标跟踪 (43)3.8 Displaying Target Data显示目标数据 (43)3.8.1 Displaying individual target data显示个别目标数据 (43)3.8.2 Target list目标清单 (44)3.9 Vector Modes向量模式 (44)3.9.1 Description of vectors向量介绍 (44)3.10 Past Position Display历史位置显示 (45)3.10.1 Displaying and erasing past position points, choosing past position plot interval显示和消除历史位置点,选择历史位置标绘间隔 (45)3.10.2 Past position display attributes历史位置显示特性 (45)3.11 Set and Drift角度和漂移(光标位置) (46)3.12 Setting CPA/TCPA Alarm Ranges设置CPA/TCPA报警范围 (46)3.12.1 Setting CPA/TCPA alarm ranges设置CPA/TCPA报警范围 (47)3.12.2 Acknowledging CPA/TCPA alarm应答报警 (47)3.13 Setting a Guard Zone设置警戒区 (47)3.13.1 Activating the guard zone激活警戒区 (47)3.13.2 Sleeping, deactivating a guard zone静默,撤消警戒区 (48)3.13.3 Acknowledging the guard zone alarm应答警戒区报警 (49)3.13.4 Guard zone reference警戒区基准 (49)3.13.5 Guard zone shape and stabilization警戒区形状和稳定性 (49)3.14 Operational Warnings操作警告 (49)3.15 Trial Maneuver (50)3.16 ARP Performance Test ARP性能测试 (50)3.17Criteria for Selecting Targets for Tracking选择跟踪目标的原则 (50)3.18 Factors Affecting ARP Functions影响ARP功能的因素 (51)1. RADAR OPERATION雷达操作1.1 Turning on the Power打开电源打开[POWER]开关,屏幕显示计数时间,当计数器到达0:00时,就会显示”ST-BY”,表示雷达已经准备好发射.1.2 Transmitter ON发射打开电源开关,等待至屏幕出现“ST--BY”字样,才可以按[STBY/TX]键发射;关机时应先停止发射,即先按[STBY/TX]键停止发射,然后才可以关闭电源。
导波雷达物位计操作说明
导波雷达物位计使用说明书目 录测量原理 (1)仪表概况 (2)结构尺寸 (3)安装要求 (4)电气连接 (5)仪表调试 (8)1● 测量原理导波雷达发出的高频微波脉冲沿着探测组件(钢缆或钢棒)传播,遇到被测介质,由于介电常数突变,引起反射,一部分脉冲能量被反射回来。
发射脉冲与反射脉冲的时间间隔与被测介质的距离成正比。
容器中存在两种不同介质,当上面一层的介质介电常数较小,而下面的介质介电常数较大时,高频微脉冲沿着探测组件传播遇到上层介质时,由于其介电常数较小,因而有极少的能量被这一层介面反射,而大部分能量穿透上层介质继续向下传播,遇到两层的介面时,由于下层介质的介电常数较大,因而会有较大的能量被反射回来。
因而导波雷达是可以测量两种不同介质的介面,其测量条件是上层介质不导电或其介电常数比下层介质介电常数小10以上。
✧ 产品特点多种过程连接方式及探测组件的型式,使得KFL63X 系列导波雷达物位计适于各种复杂工况及应用场合。
如:高温、高压及小介电常数介质等。
公司引进德国领先的过程自动化控制技术,在原装芯片基础上成功开发出独特的回波处理技术,使得仪表在多个虚假回波的工况下,可正确地确认真实回波,可以应用于各种复杂工况。
具有以下特点:频率高、能量更集中,具有更强抗干扰能力,大大提高了测量精度和可靠性; 同轴式导波天线,获得更小的盲区、更强的回波信号; 对蒸汽和泡沫有很强的强抗干扰能力,使测量不受影响;各种特殊复杂工况的测量,如高温、高压及小介电常数介质的测量等; 接触式、高可靠性,免维护的仪表。
2● 导波雷达物位计产品概况:外 形KFL631系列KFL632系列KFL633系列应用场合 各种酸、碱等腐蚀性液体测量全四氟密封天线,耐强酸碱腐蚀高温、高压液体测量 小介电常数介质液体及固体测量最大量程 杆式6m缆式30杆式6m缆式30双杆式6m双缆式30测量精度±10mm ±10mm ±10mm过程连接 螺纹G1½A、 G2A、 1½NPTPTFE/不锈钢法兰螺纹G1½A、 G2A、 1½NPTPTFE/不锈钢法兰螺纹G1½A、 G2A、 1½NPTPTFE/不锈钢法兰过程温度 -40…150°C -40~200°C-80~400°C-40-100°C过程压力 (-0.1-1.6)Mpa(-0.1-4)MPa(-0.1~4)Mpa(-0.1~40)MPa(-0.1~4)Mpa信号输出 两线制/四线制4-20mA/HART两线制/四线制4-20mA/HART两线制/四线制4-20mA/HART电 源两线制DC24V四线制DC24V /AC220V两线制DC24V四线制DC24V /AC220V两线制DC24V四线制DC24V /AC220V探杆结构杆式/缆式 单杆/缆式 双杆/双缆探杆材质 不锈钢外包PTFE不锈钢316L/PTFE不锈钢316L/陶瓷 不锈钢316L/PTFE探杆直径Φ10mmΦ28mm同轴式导波标准 标准3● 结构尺寸(单位:mm)型外壳/材质:PBT/AL/316L型外壳/材质:AL 两室KFL631KFL632KFL6334● 安装要求基本要求在整个量程内确保缆或棒不要接触到内部障碍物,因此安装时应尽可能避开罐内设施,如:人梯、限位开关、加热设备、支架等。
雷达功能键基本操作资料

YM COSMOS雷達功能鍵基本操作●通則:記憶槽中上方為A槽,下方為B槽。
每5000小時或螢幕左下角之TUNE衰減則需更換磁控管。
或或S band。
WG84:GPS系統規格。
相對風向及風速。
●中心偏移:將游標重疊於本船中心(螢幕中心),按左鍵拖曳至想要之位置後放開;按心。
自動。
●ENH改善小目標隻回跡(特別於3nm之RANG)用於小比例尺時,會減低目標之識別能力。
長脈波。
記錄當時各船之位置及時間。
改善與設定白天及晚上之面板及螢幕之亮度。
1.DAY:白天模式。
2.NIGHT1:夜晚模式1。
a.HEADING LINE:船艏線亮度。
b.EBL/VRM:電子方位線/可變距離圈亮度。
c.CURSOR:游標亮度。
d.ARPA:自動雷達測繪援助亮度。
e.TOOLS/RANGE RINGS:工具/距離圈亮度。
f.ROUTES:航路亮度。
g.HISTORY TRACKS:航跡亮度。
h.MAPS:海圖亮度。
i.MENU TEXT:清單信文亮度(?)。
j.TARGET ALARM:目標警報亮度。
k.ALARM TEXT:警報信文亮度。
l.EXIT BRILLIANCE:離開光亮調整。
m.DEFAULT BRILL:不執行亮度調整。
n.PANEL BRILL+:面板亮度增加。
o.PANEL BRILL-:面板亮度減少。
3.NIGHT2:夜晚模式2。
4.NIGHT3:夜晚模式3。
調整螢幕強度。
1.Mode system:。
2.mode RX:。
對地速度,through the water):對水速度。
以左鍵按NAV可選船速資料之來源.游標移至數字欄(變黃)可手動輸入。
●選C,D,M,V,T。
,,。
相對運動目標相對運動模式。
相對運動目標真運動模式。
真/相對向量模式時間。
真艉跡顯示時間。
99分,將會顯示”PERM”。
(?)。
●Warning Prompts:警告提醒。
按ERBL,於EBL上出現一小圈,表示距離。
●快速方位及距離開啟,將游標移至雷達掃瞄幕中,按左鍵持續3秒左右,可快速顯示EBL及VRM。
导波雷达调试说明书
导波雷达调试说明书1、参数修改如何使用按键修改仪表参数,请参考该仪表的使用说明书关于按键的使用部分。
2、密码设置维护密码:使用按键输入85,用于仪表操作工维护,不能修改标定数据标定密码:使用按键输入385,用于制造厂出厂标定时使用。
数据备份密码:使用按键输入2198,用于仪表出厂数据备份使用数据恢复密码:使用按键输入8134,用于仪表初始数据恢复使用。
3、仪表标定3.1 正常仪表标定。
在仪表探头上任意取两点(这两点要绕过非线性区,上部180mm和下部120mm),以探头测量部分与探头头部连接螺纹根部为基准,量出这两点的距离 d1和d2,将仪表显示切换到显示L-TCK一项,用金属将这两个部分短接,得出两个L-TCK值分别为L-TCK1和L-TCK2,在仪表调试表格上选择测量类型,有液位、界位或者大量程,选择后在相应的表格中输入这2组数据,同时根据杆长确认输入杆长的范围。
即可得到两个标定数据,这两组数据在表格上显示To和Tx,将To和Tx分别输入到仪表标定参数的CAL-K和CAL-B中,即完成了仪表标定。
3.2仪表正常标定后检验如果仪表是测量液位的,在标定后仪表显示的值与以探头的下端部为基点(或者在下部120mm处为基点)在探头上任取一点(这点要绕过非线性区)的值一致,或者在0.5%的误差范围之内,就算标定合格,不合格需要重新标定。
如果仪表是测量界位的,仪表显示的值要比实际值高(高多少要看实际取点的位置)就算合格。
3.3 特殊仪表标定如果探头是单杆或者没护套的同轴探头,没有外筒,在这种情况下需要用水校,把探头安装在一个液位可调的外筒内,通过调整液位值获得任意两点的液位(这两点要绕过非线性区,上部180mm和下部120mm)。
其余参照3.1。
标定后需要按照3.2检验。
4、小量程手动标定4.1小量程探头范围小量程探头范围有:探头长度L<1.1, 1.1<=探头长度L<1.9,1.9<=探头长度L<3.41.4<=探头长度L<6.1,6.1<=探头长度L<10五种。
基本操作(导波雷达)
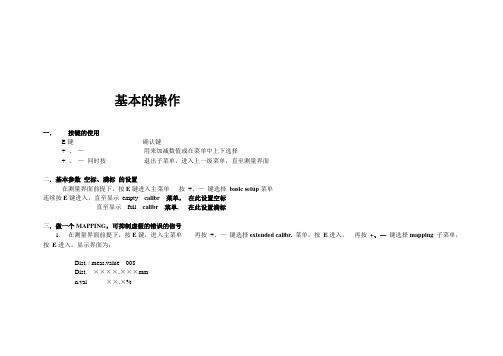
基本的操作
一.按键的使用
E键确认键
+ 、—用来加减数值或在菜单中上下选择
+ 、—同时按退出子菜单,进入上一级菜单,直至测量界面
二.基本参数空标、满标的设置
在测量界面前提下,按E键进入主菜单按+、—键选择basic setup菜单
连续按E键进入,直至显示empty calibr 菜单,在此设置空标
直至显示full calibr 菜单, 在此设置满标
三.做一个MAPPING,可抑制虚假的错误的信号
1.在测量界面前提下,按E键,进入主菜单再按+、—键选择extended calibr.菜单,按E进入,再按+、—键选择mapping子菜单,按E进入,显示界面为;
Dist. / meas.value 008
Dist. ××××.×××mm
n.val ××.×%
2.再按E键进入, 选择manual子菜单, 按E进入, 显示界面为:
range of mapping 052
input of mapping range
在此输入数值为: 上一界面中的Dist. ××××.×××mm —500mm,
(前提为:表的显示液位等于罐内实际液位) 再按E键确认, 选择start mapping on, 然后界面会闪烁recoding mapping 几秒,表明mapping 已完成,再同时按+、—键退出到测量界面
3.当罐内液位为0时,最适合按此方法做MAPPING.。
地质雷达操作手册
TerraSIRch SIR System-3000用户手册提供自1970年以来人们能够利用的完整测量解决办法信息地球物理测量系统公司版权:2003地球物理测量系统公司保留任何形式的全部或部分复制的权利。
出版者:地球物理测量系统公司(美国新罕布什尔州,北塞勒姆(North Salem),克来因巷道13号,邮编:03073-0097)印刷地:美国GSSI,RADAN和SIR是地球物理测量系统公司的注册商标。
限定的担保(或保修),责任和约束的限制地球物理测量系统公司(在下文称之为GSSI)保证从交给买方的交货日期起12个月内,GSSI的产品将不会出现材料和工艺方面的故障。
除上述的限制担保之外,GSSI拒绝所有的担保(明确的或暗指的),包括任何销路的担保或为特定目的合理性的担保。
GSSI的义务是被限定在修理或更换那些被返回的元件或设备上(已预付运输和保险费,没有变更和进一步损坏),和那些按照GSSI的看法是有缺陷的或在正常使用期间变得有缺陷的元件或设备上。
GSSI以为不管设备是否有缺陷,只要是因设备适当的或不正确的操作所引起的任何直接、间接、特殊的、偶然的或随之发生的损坏或损伤都不负赔偿责任。
在给GSSI返回任何设备前,必须先取得返回材料授权(RMA)的编号。
请打电话给GSSI 用户服务经理,他将分配一个RMA编号。
务必拥有设备的有效序列编号。
联邦通讯委员会(FCC)的B类服务(或顺从性)该设备遵守联邦通讯委员会规则的第15部分。
操作服从下列两个条件:(1)该设备不可以引起有害的干扰,(2)该设备必须接受任何接收的干扰,包括可以引起不希望有的干扰。
警告:若用户对该设备的改变或修改没有明显地得到担负服务一方的同意,就可能取消这个用户操作该设备的权利。
注释:该设备经过测试后发现,依据FCC规则的第15部分,它遵守B类数字设备的限制。
当该设备在商业环境或(居住装置)中操作时,这些限制被用来提供对有害干扰的合理保护。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
导波雷达使用手册 ShockShield 休克保护技术。假设主 cpu 因外界强烈电磁干扰重启的 情况下,仪表可以在重启瞬间对输出电流进行锁定,等待主 CPU 重启 完毕后对 4-20mA 电流进行改变。 WavesMemo 回波曲线自动存储技术。在仪表运行期间对物料不同高度 和仪表测量状态发生改变时回波曲线进行存储,为仪表测量故障诊断 提供方便的解决手段。 HartWaver 远程回波诊断仪,支持跨现场和跨城市的仪表调试。 TankWatcher 罐旁回波智能操作单元,支持在罐旁的仪表调试,回波曲 线观察,开关量报警输出。
142
191
366
L
H
H
L
316杆 10 PFA厚1mm
12
9
G1½A
4
重锤
导波雷达使用手册
3 技术特性
•工作频率: 100MHZ-1.8GHZ
•测量范围:
缆式 0-30m
杆式 0-3m
技术指标
同轴式 0-6m •重复性: ±1.5mm
•精度: ±2mm
•次/s •输出信号:4~20mA
ROCKHILL
AUTOMATION INC.
ROHEVEL GRT
操作手册
导波雷达物位计
罗克希尔测控技术(北京)有限公司 译
BA01035G/08/CH/19.15 71282281
www.rockhill.ca
导波雷达使用手册
警告
静电防护措施 本仪表中由于含有易感受静电的电子器件。因此对其内部的电路板或元器
142
186
187
L
H
G1½A
H
L
G1½A 同轴管
21
8
导波雷达使用手册
ROHEVEL-GRT2202(缆式)
142
ROHEVEL-GRT2202(杆式)
142
201
201
L
H
G1½A
8 重锤 40
H
L
G1½A 24
ROHEVEL-GRT2203(杆式)
142
ROHEVEL-GRT2206(缆式)
••
导波雷达使用手册
•24VDC 两线制普通型电源:18~36VDC,纹波电压:100mv.vp.p 最大电流22.5mA
运输存储 仪表采用纸箱或木箱包装,在搬运时小心转运,不允许野蛮装卸,存放地点
应符合防雨防潮、且不受机械震动或冲击等。
开箱验货 仪表拆箱后严格按装箱清单验货,若发现有错误、缺货或破损等现象,请立即与 我公司或当地代理联系。
仪表装调 1. 详细阅读说明书,严格按相关要求进行安装和调试; 2. 确保仪表可靠接地; 3. 仪表接线完成后,出线口密封性良好,护线管无积水现象发生; 4. 仪表调试完成后,旋紧表盖。
5
导波雷达使用手册 1.3.3酸碱储罐液位测量 GRT2203导波雷达物位计是为腐蚀性液体液位测量而设计的。探头和仪表 法兰由PFA材料全包覆。是腐蚀性液体测量的理想解决方案。 1.3.4食品加工或制药容器液位测量 GRT2203导波雷达物位计同时也是食品加工和制药容器中液位测量的理想 选择。探测组件由食品安全级材料PFA或者PTFE全部包覆的,完全满足食 品卫生安全要求。 1.3.5立管和旁通管式液位测量 立管和旁通管的使用可以解决搅拌扇叶对导波探测组件造成的影响,经 常见于化工容器中,比如石化行业。在这种测量环境中,导波雷达的测 量具有很多的优势。立管和旁通管能够增强导波雷达接收信号的强度。 旁通管的侧面连接开口,罐内的沉淀物或腐蚀性物质对测量结果都不会 有影响。 产品能够在高达400℃的过程温度下进行测量,即使是标准产品,也能够 在150℃过程温度下进行测量。
1.2 特点和优势
TwinChips 双 CPU 协同测量技术,硬件处理能力更强、算法更智能、系 统更稳定。 Multi-Track 多回波跟踪判决算法,在存在障碍物、搅拌、蒸汽等测量 环境中仪表具有更可靠的回波识别能力。 仪表标配群脉冲抑制电路和防浪涌保护器,提供最高 IV 级的电磁兼容 能力。
4
件进行拆卸、以及安装等操作时,均应采取适当有效的静电防护措施,并请按下 述原则进行。 1. 必须拆除仪表的供电电源 2. 对印刷电路板或其内部元件进行接触、拆卸、安装、以及调整前,操作人员
应佩戴防静电环或者采取其它安全可靠的方式接地,确保静电快速顺畅的泄 放。 3. 印刷电路板必须置于导电包装袋或其它的导电容器中进行运输、存储,直到 现场安装时,才允许将其从静电防护包中取出。被拆换的印制电路板必须立 即放进具有静电防护功能的容器内,不可随意放置以备运输、存储。
2
导波雷达使用手册
7.4 回波快捷查看界面 .................................. 33 7.5 【快速设置】菜单 .................................. 35 7.6 【基本设置】菜单 .................................. 36 7.7 【显示设置 】菜单 ................................. 37 7.8 【系统设置】菜单 .................................. 37 7.9 【线性化】菜单 .................................... 38 7.10 【安全设置】菜单 .................................. 39 7.11 【通讯设置】菜单 .................................. 39 7.12 【系统诊断】菜单 .................................. 40 7.13 【系统信息】菜单 .................................. 40 7.14 【记录曲线】菜单 .................................. 40 8 调试验收确认 ...................................... 41 附件 1:常见故障处理 ..................................... 42 附表 2:常见物质介电常数 ................................. 43
3
导波雷达使用手册
1 概述
1.1 原理
GRT 系列导波雷达物位计是基 于时间行程原理的“俯视式”测 量系统。探头发出高频脉冲并沿 缆绳传播,当高频脉冲遇到物料 时反射回来被接收器接收。通过 独特的等效采样技术,记录脉冲 发射到接收之间的时间差,最终 转化为仪表测量参考点(仪表过 程连接处)到物料表面的距离。 其测量距离D与脉冲的时间行程t 成正比:D=c*t/2--其中c为光速 根据已知的空罐值E,则物位L为: L=E-D--空罐值E的参考点见右图
通讯接口 •输出信号: HART 通讯协议
过程连接 •1-1/2”NPT或法兰可选
过程温度
• -40℃~200℃(适用于GRT2201型、GRT2202型) • -40℃~150℃(适用于GRT2203型) • -40℃~450℃(适用于GRT2206型)
过程压力
• -1.0kgf/cm²~40kgf/cm²(适用于GRT2201型、GRT2202型) • -1.0kgf/cm²~16kgf/cm²(适用于GRT2203型) • -1.0kgf/cm²~400kgf/cm²(适用于GRT2206型)
环保 本仪器的包装物符合环保要求,拆箱后请用户交当地回收机构。 仪表报废后交电子处理单位处理。 1
导波雷达使用手册
目录
1 概述 ............................................... 4 1.1 原理 ............................................... 4 1.2 特点和优势 ......................................... 4 1.3 应用领域 ........................................... 5 2 尺寸 ............................................... 7 2.1 外壳尺寸 ........................................... 7 2.2 仪表尺寸 ........................................... 8 3 技术特性 ...........................................10 4 安装指南 .......................................... 12 4.1 开箱与验货 ........................................ 12 4.2 安装 .............................................. 12 4.3 罐旁安装 .......................................... 20 5 电气连接 .......................................... 24 5.1 供电电压 .......................................... 24 5.2 连接电缆和安装 .................................... 24 5.3 屏蔽电缆和接地 .................................... 24 5.4 电缆参数 .......................................... 25 5.5 输出参数 .......................................... 25 5.6 接线方式 .......................................... 26 6 仪表调试种类 ...................................... 29 6.1 仪表液晶显示单元 .................................. 29 6.2 TackWacher 罐旁回波智能操作单元 .................... 30 6.3 HartWaver 远程回波诊断仪 ........................... 30 7 仪表显示单元参数设定 .............................. 31 7.1 参数架构 .......................................... 31 7.2 基本设定方法 ...................................... 32 7.3 主界面介绍 ........................................ 33