液位模糊控制系统的设计【毕业作品】
模糊控制案例001
10) 11) 12) 13) 14) 15) 16) 17) 18) 19)
If E=Z and EC=PB or PS then U=PS If E=Z and EC=Z then U=Z If E=NS and EC=NB or NS then U=Z If E=NS and EC=Z or PS then U=PS If E=NS and EC=PB then U=PM If E=NM and EC=NB then U=PS If E=NM and EC=Z or NS then U=PM If E=NB and EC=NS or NB then U=PM If E=NM and EC=PB or PS then U=PB If E=NB and EC=Z or PS or PB then U=PB
以不是,甚至可以不是一个整数,经变
换后,是基本论域上的元素。
• 模糊控制的特点 所谓的模糊控制,既不是指被控制的 对象是模糊的,也不是模糊控制器是不确 定的,模糊控制有着自己的一套精确的理 论和算法。所谓的模糊是指在表示知识, 概念上的模糊性。虽然模糊控制器的算法 是通过模糊语言描述的,但它所完成的是 一项完全确定性的工作。
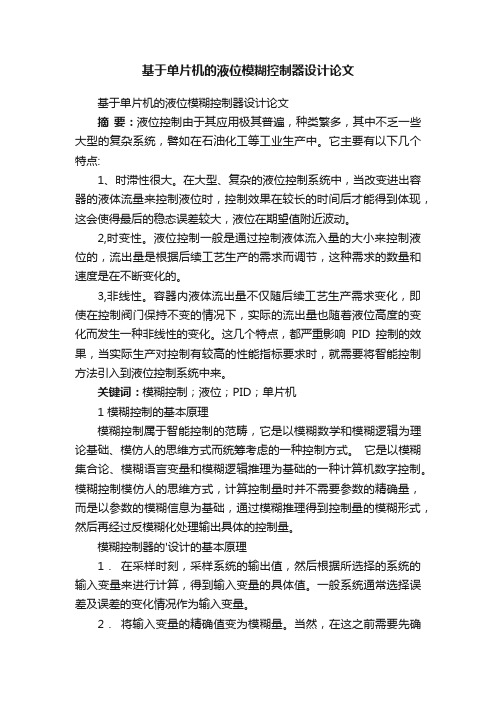
表4 模糊控制规则表格
E Ai
U Ck EC Bj
A1 PB
NM C6 R2 NB C7
A2 PM
NS C5 R4 NM C6 R5 NB C7 R3
A3 PS
Z C4 R6 NS C5 R7 NM C6 R6
A4 Z
PS C3 R10 Z C4 R11 NS C5 R9
A5 NS
PM C2 R14 PS C3 R13 Z C4 R12
A6 NM
PB C1 R18 PM C2 R16 PS C3 R15
双闭环液位模糊PID控制系统的设计
双闭环液位模糊PID控制系统的设计摘要常规PID控制器结构简单,鲁棒性强,但是不易在线整定,对非线性系统的控制效果也不是很好,而模糊控制能够克服上述缺点,只是进入稳态后会存在一定的静差,因而将两者结合起来的模糊自整定PID控制器能进一步改善液位控制系统的性能。
本文通过试验法建立被控对象的数学模型,设计•出双闭环液位串级控制系统,主调节器用模糊自整定PID控制,副调节器均采用比例控制。
针对液位控制系统特征,选取合适的模糊控制规则和隶属度函数,设计模糊自整定PID控制器,并计算出模糊控制表。
将设计的审级系统在Simulink中仿真,并在被控对象模型参数变化和添加扰动的情下,比较了常规PID与模糊自整定PID的控制效果。
验证了模糊自整定PID控制器的优越性能。
关键词:吊级控制系统;PID控制;模糊自整定PIDDesign of double-loop Liquid-levelControl System with Fuzzy PIDAbstractPID controller has a simple structure and good robustness, but the parameters of conventional PID can not be easily regulated on line・When it is used in the nonlinear systems, usually the satisfactory performance can not be obtained. Fuzzy control can overcome the above disadvantages, but the static error is difficult to disappear. Therefore, the combination of fuzzy control and PID control would furtherly improve the performance of the liquid-level control system. In this thesis, the mathematical model of the plant is firstly built by the experimental method. Then the three-loop cascade control system, with the fuzzy self-regulating PID controller as the main controller and the P controller as the two subregulators, is designed. For the liquid level control system, the fuzzy self-regulating PID controller is designed after designing the appropriate membership functions and fuzzy control rules,.The simulations of the designed cascade system are carried out in Matlab/Simulink environment..The real time control results show that the fuzzy self-regulating PID controller has good control performance.Keywords:cascade control system; PID control: fuzzy self-regulating PID第一章绪论自动控制理论经历了经典控制理论、现代控制理论两个发展阶段,现在已进入了非线性智能控制理论发展时期。
基于PLC的液位控制系统研究毕业设计(论文)

毕业设计论文基于PLC的液位控制系统研究摘要本文设计了一种基于PLC的储罐液位控制系统。
它以一台S7-200系列的CPU224和一个模拟量扩展模块EM235进行液位检测和电动阀门开度调节。
系统主要实现的功能是恒液位PID控制和高低限报警。
本文的主要研究内容:控制系统方案的选择,系统硬件配置,PID算法介绍,系统建模及仿真和PLC编程实现。
本设计用PLC编程实现对储罐液位的控制,具有接线简单、编程容易,易于修改、维护方便等优点。
关键字:储罐;液位控制;仿真;PLCAbstractThis article is designed based on PLC, tank level control system. It takes a series s7-200 CPU224 and an analog quantities of EM235 expansion module to level detection and electric valve opening regulation.System main function is to achieve constant low level PID control and limiting alarm.The main contents of this paper: the choice of the control system plan, system hardware configuration, PID algorithm introduced, system modeling and simulation, and PLC programming. PLC programming with the design of the tank level control have the advantage of simple wiring, easy programming, easy to modify, easy maintenance and so on.Key word: tank ; level ;control ;simulation ;plc目录摘要 (I)ABSTRACT ........................................................... I I 1 绪论. (1)1.1盐酸储罐恒液位控制任务 (1)1.2本文研究的意义 (2)1.3本文研究的主要内容 (2)2 控制系统方案设计 (3)2.1储罐液位控制的发展及现状 (3)2.2系统功能分析 (3)2.3系统方案设计 (4)3 系统硬件配置 (5)3.1电动控制阀的选择 (5)3.1.1 控制阀的选择原则 (5)3.1.2 ZAJP 精小型电动单座调节阀性能和技术参数介绍 (10)3.2液位测量变送仪表的选择 (13)3.2.1 液位仪表的现状及发展趋势 (13)3.2.2 差压变送器的测量原理 (13)3.2.3 差压式液位变送器的选型原则 (14)3.2.4 DP系列LT型智能液位变送器产品介绍 (15)3.3PLC机型选择 (16)3.3.1 PLC历史及发展现状 (16)3.3.2 PLC机型的选择 (18)3.3.3 S7-200系列CPU224和EM235介绍 (20)4 PID算法原理及指令介绍 (21)4.1PID算法介绍 (22)4.2PID回路指令 (24)5 系统建模及仿真 (28)5.1系统建模 (28)5.2系统仿真 (30)5.2,1 MATLAB语言中Simulink交互式仿真环境简介 (30)5.2.2 系统仿真 (31)第6章系统编程实现 (33)6.1硬件设计 (33)6.1.1 绘制控制接线示意图 (33)6,1.2 I/O资源分配 (33)6.2软件设计 (34)6.2.1 STEP 7 Micro/Win V4.0 SP6编程软件介绍 (34)6.2.2 恒液位PID控制系统的PLC控制流程 (35)6.2.3 编写控制程序 (36)6.2.4 程序清单 (39)结束语 (40)参考文献 (41)致谢 (42)1 绪论1.1 盐酸储罐恒液位控制任务如图1.1所示为某化工厂稀盐酸储罐,该罐为钢衬聚四氟乙烯储罐,罐体高6米,容量为50立方米,重500千克。
毕业设计论文液位控制系统
毕业设计论文液位控制系统Newly compiled on November 23, 2020毕业设计基于S7-300的单容水箱液位控制系统设计Design of Liquid-Level Control System Based on S7-300 专业班级:自动化0x0x班学生姓名: x x x指导教师: x x x 副教授学院:自动化与电气工程学院2016年 6月摘要可编程逻辑控制器(PLC)作为现代工业自动化的三大支柱之一,以其可靠性、灵活性在工业控制领域得到了迅猛的发展。
PLC是微电子技术和自动控制技术相结合的产物,并受到计算机技术、通信技术的影响。
我国近年来工业自动化水平逐渐提高,PLC在许多行业得到了越来越广泛的应用。
西门子公司的S7-300系列PLC以结构紧凑,扩展能力强,高性价比的特点在许多行业受到青睐。
在本次设计中,就以S7-300作为控制器,设计一个运行稳定、安全可靠又经济的液位控制系统。
控制核心以S7-300系列的CPU313C-2DP为主,以电磁阀、压力变送器、水泵、上位机、分隔式水槽等为辅构成了单容水箱液位控制系统,对整个液位控制系统进行了硬件设计和软件设计。
在设计过程中,首先,进行硬件的选择、设计。
其次,针对S7-300PLC的进行模块化编程,实现数据的归一化等功能。
最后,利用组态王软件设计人机对话界面,通过上位机控制实现液位的自动控制,上下限参数的在线设置,及液位测量值的在线监控;达到液位控制系统的技术要求。
关键词:S7-300;组态王;液位控制ABSTRACTProgrammable Logic Controller (PLC), one of the three pillars of modern industry automation, has gained rapidly development at the industry control field for its high reliability and flexibility. PLC is the product of the combination of microelectronic technology and automatic control technology, and it can be influenced by computer technology and communication technology. Recent years, as the level of the industry automation increased in our country, PLC has been widely used in more and more fields. Siemens PLC of the s7-300 series has been the favor of many industries, with the characters of compacted structure, strong extensible ability, and high function/price ratio.This design is going to fulfill a liquid level control system, which is stable, safe, and affordable, using s7-300 as the controller. The core is CPU313C-2DP of S7-300 series and the auxiliary parts contain a solenoid valve, a pressure transmitter, a motor, PC, a separated-type tank and so on. In the design, software system and hardware system can be designed completely.During the designing process, first of all, hardwires are chosen and designed. Second, module programming can be done to get normalized data and Position Control. Third, HMI can be finished using King software, which is used to control the liquid level, adjust the top and bottom limitation parameters on-line, monitor measured value of the liquid level, and meet the technical needs of controlling liquid level.Key Word: S7-300;Kingview;Liquid level目录1 引言课题的提出过程控制通常是指连续生产过程的自动控制,是自动化技术最重要的组成部分之一。
液位控制系统毕业论文
液位控制系统毕业论文液位控制系统毕业论文引言液位控制系统是工业自动化领域中常见的控制系统之一。
它的主要功能是根据液体的实时液位信息,通过控制阀门或泵等装置,实现对液体液位的精确控制。
液位控制系统在化工、石油、食品等行业中得到广泛应用,对提高生产效率、降低安全风险具有重要意义。
本篇论文将对液位控制系统的原理、设计与应用进行深入研究和分析。
一、液位控制系统的原理液位控制系统的原理基于液位传感器的测量技术。
常见的液位传感器包括浮球式、压力式和电容式等。
浮球式液位传感器通过浮子的浮沉来感知液位高低,压力式液位传感器则通过测量液体对传感器的压力变化来确定液位。
电容式液位传感器则是通过测量电容的变化来反映液位的变化。
液位控制系统的工作原理可以简单描述为:液位传感器感知液位的变化,并将信号传递给控制器;控制器根据设定的目标液位,通过控制阀门或泵等执行器来调整液位。
这一过程需要涉及到信号采集、信号处理、控制算法和执行器控制等多个环节。
二、液位控制系统的设计液位控制系统的设计需要考虑多个因素,包括控制精度、响应速度、稳定性和可靠性等。
其中,控制精度是指系统输出与设定值之间的偏差,响应速度则是指系统对液位变化的迅速程度。
稳定性是指系统在长时间运行中的抗干扰能力,而可靠性则是指系统在各种环境条件下的正常工作能力。
液位控制系统的设计需要根据具体的应用场景来确定。
在化工行业中,由于液体的性质多变,设计师需要考虑液体的温度、压力、粘度等因素对系统的影响。
在石油行业中,由于液位控制系统通常需要应对高温、高压等极端环境,设计师需要选择适合的材料和技术来保证系统的可靠性。
在食品行业中,设计师还需要考虑食品安全和卫生要求,确保系统不会对食品质量产生负面影响。
三、液位控制系统的应用液位控制系统在工业生产中有着广泛的应用。
在化工行业中,液位控制系统可以用于控制反应釜中液位的变化,确保反应过程的稳定性和安全性。
在石油行业中,液位控制系统可以用于储罐的液位控制,避免液位过高或过低带来的安全隐患。
基于模糊控制的水箱液位控制系统设计

基于模糊控制的水箱液位控制系统设计在工业中,水平液位控制是控制系统中的重要部分,它能够有效地保持水箱液位在特定的水平。
一个高效的液位控制系统可以帮助我们高效地实现水箱液位的控制从而避免浪费水资源,从而节约成本。
随着技术的进步,模糊控制已经开始成为一个重要的技术,它可以有效地支持水箱液位控制系统的构建与管理。
首先,本研究保留了传统水箱液位控制系统的基本结构,并使用模糊控制理论来优化控制系统从而实现精确的控制效果。
首先,在生成模糊规则的过程中,将采用梯度下降法和变量化规则抽象的相结合的方法来确定模糊控制参数,以最大化水箱液位控制效果。
接下来,在模糊控制的实现过程中,会使用PID算法,以及模糊规则生成器,让检测出来的反馈信号与模糊规则生成器控制信号进行比较,并结合反馈回路系数,以调整水箱液位控制系统的运行状态。
此外,在实现水箱液位控制系统的控制部分中,将采用两个独立的控制器对水箱的液位进行控制,其中一个主控制器采用传统的PID控制算法,并配合模糊控制算法进行控制;另一个子控制器则采用线性状态反馈算法,由两个控制器一起实现更好的全局水箱液位控制。
在本研究中,还提出了一种基于数字滤波及模糊控制的结合策略,以便更好地抑制系统噪声并实现更准确的水箱液位控制。
该策略中,首先会采用数字滤波技术来减少系统的噪声,然后再采用模糊控制算法来解决系统控制的实际问题。
最后,本研究中建立了一个模型仿真实验,主要用于检验在水箱液位控制方面的实际效果。
仿真实验包括模型的建立,模糊控制参数的确定,液位控制策略的调整,以及液位控制策略的比较等。
仿真结果表明,采用本研究中建立的模糊控制策略,可以有效地调节水箱液位,达到良好的控制效果,表明该模糊控制策略有效可靠。
综上所述,本文针对传统水箱液位控制系统的局限性,提出了一种基于模糊控制的水箱液位控制系统的设计方案,通过梯度下降法和变量化规则抽象的相结合的方法来确定模糊控制参数,以最大化液位控制的效果,并采用PID算法和模糊规则生成器来实现更加精确的水箱液位控制,经过仿真实验和结果分析,证明了该控制系统的有效性和可靠性。
基于单片机的液位模糊控制器设计论文
基于单片机的液位模糊控制器设计论文基于单片机的液位模糊控制器设计论文摘要:液位控制由于其应用极其普遍,种类繁多,其中不乏一些大型的复杂系统,譬如在石油化工等工业生产中。
它主要有以下几个特点:1、时滞性很大。
在大型、复杂的液位控制系统中,当改变进出容器的液体流量来控制液位时,控制效果在较长的时间后才能得到体现,这会使得最后的稳态误差较大,液位在期望值附近波动。
2,时变性。
液位控制一般是通过控制液体流入量的大小来控制液位的,流出量是根据后续工艺生产的需求而调节,这种需求的数量和速度是在不断变化的。
3,非线性。
容器内液体流出量不仅随后续工艺生产需求变化,即使在控制阀门保持不变的情况下,实际的流出量也随着液位高度的变化而发生一种非线性的变化。
这几个特点,都严重影响PID控制的效果,当实际生产对控制有较高的性能指标要求时,就需要将智能控制方法引入到液位控制系统中来。
关键词:模糊控制;液位;PID;单片机1 模糊控制的基本原理模糊控制属于智能控制的范畴,它是以模糊数学和模糊逻辑为理论基础、模仿人的思维方式而统筹考虑的一种控制方式。
它是以模糊集合论、模糊语言变量和模糊逻辑推理为基础的一种计算机数字控制。
模糊控制模仿人的思维方式,计算控制量时并不需要参数的精确量,而是以参数的模糊信息为基础,通过模糊推理得到控制量的模糊形式,然后再经过反模糊化处理输出具体的控制量。
模糊控制器的'设计的基本原理1.在采样时刻,采样系统的输出值,然后根据所选择的系统的输入变量来进行计算,得到输入变量的具体值。
一般系统通常选择误差及误差的变化情况作为输入变量。
2.将输入变量的精确值变为模糊量。
当然,在这之前需要先确定模糊变量的基本论域、模糊子集论域、模糊词集及隶属函数。
系统中输入变量的实际变化范围称为变量的基本论域,对于模糊控制输入所要求的变化范围称为它们的模糊子集论域。
模糊子集论域的确定和下一步的模糊推理中需要的模糊值有关。
毕业设计论文_液位检测显示控制系统设计
毕业设计论文_液位检测显示控制系统设计毕业设计论文_液位检测显示控制系统设计摘要水位测量在日常生活和工业领域有着广泛的应用,比如江河湖泊,地下水,水电站等都需要进行水位监测,以此来了解水位的工作情况以方便工作。
水位监测系统目前在国里外都有广泛的应用。
水位检测就是水位数据的采集、存储、传输、处理等技术的集成。
水位检测的方法有很多种,如人工检测、传感器检测等等。
本文介绍的是基于压力传感器实现的液位控制器的设计方法,该控制器以STC89C51单片机为核心,并辅以外围硬件电路来实现控制要求。
本文首先介绍总体的设计方案,接着重点介绍各功能模块的作用及实现方法。
最后,介绍proteus 仿真软件。
关键词:水位检测单片机控制传感器摘要ABSTRACTWater level measurement in daily life and industrial fields have a wide range of applications, such as rivers, lakes, groundwater, hydropower, all these need water level monitoring , in order to understand the changes in the water level to facilitate the work. Water level monitoring system are widely used inside and outside currently. Level detection is the level of data collection, storage, transmission, processing and other technology integration. Level detection methods are many, such as artificial detection, sensor detection and so on. This article is based on a pressure sensor to achieve the level controller design method, the controller STC89C51 microcontroller as the core, supplemented by peripheral hardware circuit to achieve control requirements. This paper describes the overall design scheme, and then focuses on the role of various functional modules and implementation. Finally, proteus simulation software is introduced.Keywords: level detection single chip microcomputer control sensor目录第一章绪论 (3)1.1 液位自动检测的现状及发展趋势 (3)1.2 课题背景及研究意义 (4)1.3 方案规划 (4)第二章单片机最小系统设计 (7)2.1 单片机最小系统的功能 (7)2.2 51系列单片机 (7)2.3 单片机最小系统的结构 (10)2.3.1 时钟电路 (10)2.3.2 复位电路 (10)2.4 最小系统的电路设计 (11)第三章水位测量与显示模块的设计 (15)3.1 传感器的介绍 (15)3.2 0804模数转换器 (16)3.3 LCD液晶显示模块电路设计 (18)3.4 报警电路的设计 (20)3.5 控制电路的设计 (21)第四章软件的设计 (23)4.1 软件的整体结构设计 (23)4.2 LCD液晶显示程序设计 (23)4.2.1 LCD1602的基本操作时序 (23)4.2.2 LCD1602的初始化过程 (26)4.2.3 LCD1602的显示流程 (26)4.2.4 液晶显示部分子函数源程序 (27)4.3 4*1键盘程序设计 (29)4.3.1 按键的消抖 (29)4.3.2 按键部分源程序 (29)4.4 ADC0804程序的设计 (31)第五章Proteus仿真软件介绍 (37)5.1 仿真介绍 (37)5.2 Proteus的ISIS介绍 (37)5.3 利用Proteus绘制原理图 (40)5.4 Keil与Proteus的联调仿真 (41)第六章总结 (43)致谢 (45)参考文献 (47)附录1 电路图 (49)附录2 程序 (51)附录3 实物图 (59)第一章绪论1.1 液位自动检测的现状及发展趋势在现代化的工业生产中,液位测量几乎遍及生产工厂的各个环节。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
BI YE SHE JI(20 届)液位模糊控制系统的设计所在学院专业班级自动化学生姓名学号指导教师职称完成日期年月-II-摘要液位控制系统广泛存在于各个领域,是工业过程控制中的典型控制之一,液位控制早期运用PID控制方法实现。
常规的PID控制器具有无静态误差、高可靠行、算法简单等优点。
它的设计核心是整定参数,对于确定性的被控对象通过设定合适的PID控制器的三个参数,可以获得比较理想的控制效果。
但由于实际控制系统具有时变性、多变量、大滞后等特点,且在控制过程中会受到各种干扰因素的影响,要建立精确的数学模型很困难,也就不能达到预期效果。
近些年来,在很多控制过程中模糊控制都取得了成功,模糊控制器具有不依赖被控对象数学模型,适应性强的优点,在许多无法建立精确数学模型的复杂系统中表现出了其优越性,不仅获得了较好的控制效果,而且又能简化系统的设计。
因此,模糊控制在水箱液位控制系统中就成为较好的选择。
本文利用模糊控制理论设计一水箱水位模糊控制器,具体给出了系统设计方案。
首先详细的介绍了模糊控制的基本原理及模糊控制器的相关知识,其次讲述了对系统进行模糊控制的具体设计内容,在此基础上提出对水箱水位进行模糊控制的方案。
最后,充分利用MATLAB的模糊逻辑工具箱和Simulink相结合的功能得到实际液位跟踪给定液位的曲线,仿真结果证实水箱液位模糊控制系统能够获得良好的控制效果。
关键词:液位控制;模糊控制;MATLAB;SimulinkAbstract-II-Liquid level control system exists in each field extensively and is one of the typical control in industrial process control, the liquid level control most used PID control method in the early days. Conventional PID controller has lots of strong points, for instance, it has no static error, its algorithm is simple and it is reliable. The heart of its design is setting parameters; the certainty object can achieve satisfactory control effects through proper setting three parameters of PID. But the practical control systems have the characteristics of time-dependence, nonlinear, large lag and they will be influenced by various kinds of interference factors, so it is difficult to set up accurate mathematics model, then it is not possible to achieve the desired results.In the recent years, fuzzy control has achieved success in many control process. Fuzzy controller has outstanding merits that do not rely on mathematics model of object and whose adapting ability is strong, it shows its superiority in many complex systems which have no accurate mathematics model. It not only wins the better control results, but also can reduce system design. Therefore, control fuzzily become better choice on water tank level control system. This text designs a water tank level fuzzy control system according to the fuzzy control theory and puts forward a design scheme specifically. Firstly, it introduces the fuzzy control theory and the related knowledge of the fuzzy controller. Then, it describes the detailed design things for the system design, and proposes a fuzzy control scheme for the liquid level of the water tank on this basis. At last, the system has also fully utilized the function that the fuzzy logic toolbox of MATLAB combines with SIMULINK, and obtains the curve of the actual level tracking the desired level. Simulation results show that the water tank fuzzy control system can possess good control performance.Keywords: liquid level control; fuzzy control; MATLAB; Simulink-II--IV-目 录摘要..............................................................Ⅰ Abstract..........................................................Ⅱ 目录.. (Ⅲ)第一章 引言 (1)1.1 模糊控制的研究背景和现状 (1)1.1.1 研究背景 (1)1.1.2 研究现状 (1)1.2 课题来源及研究的意义 (2)1.3 本课题的研究内容及任务 (3)第二章 模糊控制系统 (4)2.1 模糊控制的原理 (4)2.2 模糊控制器的组成 (4)2.2.1 模糊化 (5)2.2.2 数据库 (7)2.2.3 规则库 (8)2.2.4 推理机 (8)2.2.5 反模糊化 (8)2.3 模糊控制器的结构 (9)第三章 模糊控制器及模糊控制系统设计 (11)3.1 常规模糊控制器设计 (11)3.2 模糊控制器的输出形式 (13)3.2.1 位置式输出 (13)3.2.2 增量式输出 (14)3.3 模糊控制器参数与系统控制性能 (15)3.3.1 模糊控制器输入、输出变量的论域 (15)3.3.2 模糊控制器输入比例因子e K 及c K 的影响 (16)第四章 液位模糊控制系统的设计及仿真 (19)4.1 确定控制方案 (19)4.2 液位模糊控制系统的设计 (19)4.2.1 确定模糊控制器的结构 (19)4.2.2 定义输入、输出模糊集及其论域 (19)4.2.3 定义隶属函数 (19)4.2.4 建立模糊控制表 (21)4.2.5 模糊推理 (22)4.2.6 反模糊化 (22)4.3 模糊控制系统仿真 (22)4.3.1 系统仿真模型的建立 (22)4.3.2 水箱液位模糊推理系统(FIS)的建立 (22)4.3.3 对Simulink模型控制系统的构建 (25)4.3.4 对系统进行Simulink模型仿真 (27)结论 (31)参考文献 (32)致谢 (33)-IV-第一章引言1.1模糊控制的研究背景和现状1.1.1 研究背景控制技术被广泛地应用在各种工业技术领域里,成为现代高新技术的重要手段之一。
随着控制技术的发展,控制理论与方法也得到发展。
经典的控制技术有一个明显的特征,即模型的结构非常精确。
它是根据控制对象本身所具有特定物理特征、化学性质等,然后根据数学方法推导出一般都很复杂的模型方程,而且在这些复杂的数学模型中大量参数需要被估计,然而估计这些参数缺乏充足的数据信息。
参数不能够被很好的确定,也就得不到控制系统的数学模型,该控制系统就不能运用经典的控制方法来实现控制。
在实际生产生活中所涉及到的控制系统大多是非线性、多变量、时变的复杂系统,经典控制技术的精确性要求不能满足被控对象的复杂性。
就像L. A. Zadeh所言,随着工业化水平日益提高,系统也越来越复杂,人们很难对系统做出精密的数学推导与描述,进而控制技术与复杂系统要求的差异日益加大。
实际上,要想根据系统的力学或物理特性等信息得到被控系统的精确数学模型是不可能的。
这种情况下,就激发了人们寻求对控制对象数学模型无要求的控制方法的研究兴趣。
在目前研究的控制系统中,人很容易被看作合理的非线性控制器,这种非线性控制器则可以被看成是随时间变化的数学函数。
控制过程与人的控制经验的结合,引出了研究者对新型控制方法的研究切入点。
这种控制原理建立在人的控制经验的基础之上,蕴涵人类思维过程所包含的控制知识,而且通过控制所要达到的目的可以利用某种很容易被实现的方式表达出来。
运用这样的控制方法不需要建立难以获得的精确数学模型,也就避免了复杂而又错误的参数估计过程。
在多变量、非线性、时变的实际复杂系统中,人们可以采用简单灵活的控制方法,模糊控制在这样的背景下便逐渐产生。
1.1.2 研究现状近些年来,国内外模糊数学工作者在模糊逻辑和模糊技术的研究和应用方面,做了大量工作并取得了可喜的成绩。
在日本,模糊控制得到了很快的发展。
-31-表现在模糊技术应用在家电、制造、冶金等自动控制行业。
很多公司成立了模糊控制系统研究所专门从事模糊系统的研究。
另外,模糊逻辑芯片和模糊计算机的研制也取得了进展。
模糊控制是以模糊集理论、模糊语言变量和模糊逻辑推理为基础的一种人类智能控制,可以实现非线性控制,可以实现对复杂系统的控制。