单容水箱液位模糊控制系统的设计与研究_杨杰
单容水箱液位控制系统设计计算机课设
辽宁工业大学微型计算机控制技术课程设计(论文)题目:单容水箱液位控制系统设计院(系):电气工程学院专业班级:自动化074学号:*********学生姓名:***指导教师:(签字)起止时间:2010.12.15—2010.12.24课程设计(论文)任务及评语院(系):电气工程学院教研室:自动化摘要本文根据液位系统过程机理,建立了单容水箱的数学模型。
介绍了PID控制的基本原理及数字PID算法,并根据算法的比较选择了增量式PID算法。
建立了基于单片机编程语言的PID液位控制模拟界面和算法程序,进行了系统仿真,并通过整定PID 参数,利用MATLAB应用软件对系统进行仿真得到图线。
系统由进出水阀门,单片机,A/D转换器,D/A转换器,传感器,显示电路和键盘电路等组成。
整个过程保持进水阀的开度比例不变,由传感器检测电路连续不断地相应液位值,送入A/D转换器中处理,输出的数字量送给单片机,控制显示电路实时显示实际液位值,由键盘输入设定值,控制器比较其值控制出水阀门的开度比例,以保持液位稳定在要求范围内。
关键词:水箱建模,液位控制,PID算法,增量式PID目录第1章绪论 (1)第2章课程设计的方案 (2)2.1概述 (2)2.2系统组成总体结构 (2)第3章硬件设计 (3)3.1单片机最小系统设计 (3)3.2传感器模块 (3)3.3A/D转换和D/A转换模块 (3)3.4键盘模块 (3)3.5显示模块 (4)第4章软件设计 (5)4.1PID算法 (5)4.2位置式PID控制系统 (6)4.3增量型PID控制算法 (8)4.4PID计算 (10)4.5主程序控制流程 (11)4.6显示部分 (12)第5章系统测试与分析/实验数据及分析 (14)5.1MATLAB程序 (14)5.2MATLAB成象曲线 (14)第6章课程设计总结 (15)参考文献 (16)附录:系统硬件原理图 (17)第1章绪论过程控制是自动技术的重要应用领域,它是指对液位、温度、流量等过程变量进行控制,在冶金、机械、化工、电力等方面得到了广泛应用。
水箱液位控制系统的设计与研究
万方数据万方数据万方数据水箱液位控制系统的设计与研究作者:杨旭, 周悦, 于广平, YANG Xu, ZHOU Yue, YU Guang-ping作者单位:杨旭,周悦,YANG Xu,ZHOU Yue(沈阳建筑大学信息与控制工程学院,沈阳,110168), 于广平,YU Guang-ping(中国科学院沈阳自动化研究所,沈阳,110016)刊名:制造业自动化英文刊名:Manufacturing Automation年,卷(期):2011,33(16)1.张毅成;戴连奎;杨正春四水箱实验系统的关联分析与解耦[期刊论文]-自动化仪表 2005(11)2.陈宗海过程系统建模与仿真 19973.薛定宇控制系统计算机辅助设计 20064.王树青;戴连奎工业过程控制工程 20025.Qingdong Zeng;Guanzheng Tan Optimal Design of PID Controller Using Modified Ant Colony System Algorithm 20076.M.D.Tong Linear system theory and design 20047.黄琳琳水箱液位控制系统的研究与建模[期刊论文]-硅谷 2010(13)8.赵科;王生铁;张计科三容水箱的机理建模[期刊论文]-控制工程 2006(06)1.劳深.付凯波.高国章.Lao Shen.Fu Kaibo.Gao Guozhang双容水箱液位控制系统的设计[期刊论文]-交通科技2011(3)2.吴兴纯.杨秀莲.赵金燕.杨燕云基于FX_(2N)系列PLC的双容水箱液位控制系统的设计[期刊论文]-电子设计工程2011,19(14)3.刘和勇.马立新.孙大帅.余涛.LIU He-yong.MA Li-xin.SUN Da-shuai.YU Tao模糊算法在双容水箱液位控制系统中的应用[期刊论文]-微特电机2010,38(9)4.段宏伟.DUAN Hong-wei基于模糊算法的双容水箱液位控制系统设计[期刊论文]-建材技术与应用2011(8)本文链接:/Periodical_zzyzdh201116036.aspx。
基础项目二:单容水箱水位的模糊控制
山东理工大学
电气与电子工程学院
项目设计说明书
项目题目: 课程名称: 《智能控制技术导论A 》 专业班级: 学生姓名: 学 号:
任课教师: 完成日期:
单容水箱水位的模糊控制
自动化专业 2013级 班 刘丽娜
项目设计任务书
图1水位人工控制系统
由人工操作实现的正确步骤是:操作人员首先将要求水位牢记在大脑中,然后用眼睛和测量工具测量水池实际水位,并将实际水位与要求水位在大脑中进行比较、计算,再按照误差的大小和正负性质,由大脑指挥手去调节进水阀门的开度,使实际水位尽量与要求水位相等。
人工控制的过程是测量、求误差、控制、再测量、再求误差、再控制这样一种不断其控制目的是要尽量减小误差,使实际水位尽可能地保持在要求水位附近。
模糊控制水箱液位调节

实验二:模糊控制水箱液位调节一实验目的1.掌握模糊控制的原理2.加强模糊控制在实践中的应用二实验器材装有Matlab软件PC电脑一台三实验原理模糊控制的基本原理:它的核心部分为模糊控制器,模糊控制器的控制规律由有计算机程序实现。
详见P32(模糊控制原理)。
四原代码clear allclose allq1=0; %定义第一个水箱的入水量q2=0; %定义第一个水箱的出水量q3=0; %定义第二个水箱的出水量q4=0; %定义第三个水箱的出水量b=1.4; %定义第一个水箱入水量的控制系数a1=8.6; %定义第一个水箱出水量的控制系数a2=8.6; %定义第一个水箱出水量的控制系数h1=100; %定义第一个水箱中水的初始高度h2=100; %定义第二个水箱中水的初始高度h3=100; %定义第三个水箱中水的初始高度v=119; %定义sin函数的系数s=190; %定义水箱底面积k=10; %定义开关控制量e=0; %定义误差e_1=0;ec=0;H=130; %定义第三个水箱的期望高度e=H-h1;a=newfis('fuzz'); %误差函数a=addvar(a,'input','e',[-25,25]);a=addmf(a,'input',1,'NB','zmf',[-25,-10]);a=addmf(a,'input',1,'PS','trimf',[-25,-10,0]);a=addmf(a,'input',1,'Z','trimf',[-10,0,10]);a=addmf(a,'input',1,'PS','trimf',[0,10,25]);a=addmf(a,'input',1,'PB','smf',[10,25]);a=addvar(a,'output','u',[0,100]); %控制量输出函数a=addmf(a,'output',1,'NB','zmf',[0,30]);a=addmf(a,'output',1,'NS','trimf',[0,30,50]);a=addmf(a,'output',1,'Z','trimf',[30,50,70]);a=addmf(a,'output',1,'PS','trimf',[50,70,100]);a=addmf(a,'output',1,'PB','smf',[70,100]);rulelist=[1 1 1 1;2 2 1 1;3 3 1 1;4 4 1 1;5 5 1 1];a = addrule(a, rulelist);for i=1:1:8000tt(i)=i; %时间轴q1=b*k; %第一个水箱的进水量q2=a1*sqrt(h1); %第一个水箱的出水量h1=h1+(q1-q2)/s; %第一个水箱中水的高度q3=a2*sqrt(h2); %第二个水箱的进水量h2=h2+(q2-q3)/4; %第二个水箱中水的高度q4=v*abs(sin(2.3*pi*i+0.35)); %第二个谁想的出水量h3=h3+(q3-q4)/s; %第三个水箱中的高度hh(i)=h3;k=evalfis(e,a);e=H-h3;endplot(tt,hh)五、插图。
水箱水位恒定的模糊PID控制(2)
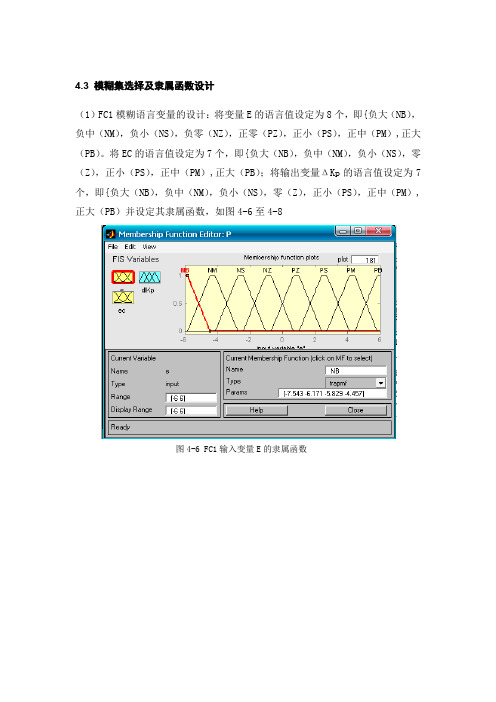
4.3 模糊集选择及隶属函数设计(1)FC1模糊语言变量的设计:将变量E的语言值设定为8个,即{负大(NB),负中(NM),负小(NS),负零(NZ),正零(PZ),正小(PS),正中(PM),正大(PB)。
将EC的语言值设定为7个,即{负大(NB),负中(NM),负小(NS),零(Z),正小(PS),正中(PM),正大(PB);将输出变量ΔKp的语言值设定为7个,即{负大(NB),负中(NM),负小(NS),零(Z),正小(PS),正中(PM),正大(PB)并设定其隶属函数,如图4-6至4-8图4-6 FC1输入变量E的隶属函数图4-7 FC1输入变量EC的隶属函数图4-8FC1输出变量△Kp的隶属函数(2)FC2模糊语言变量的设计:将输入模糊变量E、EC和输出模糊变量ΔKi 的语言值都设定为7个,即{负大(NB),负中(NM),负小(NS),零(Z),正小(PS),正中(PM),正大(PB)。
模糊控制器FC2的输入输出模糊语言变量值隶属函数如图4-9至4-11图4-9 FC2输入变量E的隶属函数图4-10 FC2输入变量EC的隶属函数图4-11 FC2输出变量△Ki的隶属函数(3)FC3模糊语言变量设计:将变量E的语言值设定为6个,即{负大(NB),负中(NM),负小(NS),正小(PS),正中(PM),正大(PB)。
将EC的语言值设定为7个,即{负大(NB),负中(NM),负小(NS),零(Z),正小(PS),正中(PM),正大(PB);将输出变量ΔKd的语言值设定为7个,即{负大(NB),负中(NM),负小(NS),零(Z),正小(PS),正中(PM),正大(PB)并设定其隶属函数如图4-12至4-14图4-12 FC3输入变量E的隶属函数图4-13 FC3输入变量EC的隶属函数图4-14 FC3输出变量△Kd的隶属函数4.4 模糊规则集的设定参数Kp 、Ki 、Kd在不同的e 和ec 下的自调整要满足如下调整原则: (1) 当e 较大时,为加快系统的响应速度,防止因开始时e 的瞬间变大可能会引起的微分溢出,应取较大的Kp 和较小的Kd ,同时由于积分作用太强会使系统超调加大,因而要对积分作用加以限制,通常取较小的Ki值;(2) 当 e 中等大小时,为减小系统的超调量, 保证一定的响应速度, Kp 应适当减小;同时Kd 和Ki的取值大小要适中;(3) 当e 较小时,为了减小稳态误差, Kp 与Ki 应取得大些,为了避免输出响应在设定值附近振荡,同时考虑系统的抗干扰性能, Kd 值的选择根据|ec|值而定,ec较大时,Kd 取较小值,ec较小时,Kd取较大值,通常Kd 为中等大小。
单容水箱液位控制系统设计
过程控制系统设计作业单容水箱液位控制系统设计学生姓名文强学号2212130任课教师陶珑院、系、中心专科部专业生产过程自动化提交日期2015年10 月日太原科技大学单容水箱液位控制系统设计摘要本论文以单容水箱为被控对象,给出了单闭环控制系统、串级控制系统和前馈反馈控制系统的设计方案,实现对水箱液位的控制。
本论文还针对每种控制系统,在Matlab的Simulink中建立仿真模型进行仿真,得到仿真曲线,并且利用仿真曲线分析控制系统的性能,例如最大动态偏差、调节时间、衰减率和积分性能指标IAE等。
单闭环控制系统的设计包括P、I、PI和PID的设计。
本文分别通过衰减频率特性法(理论整定法)和衰减曲线法(工程整定法)对控制器参数进行了整定。
本论文还通过比较各控制系统的仿真曲线和系统性能指标,对各种控制系统设计方案进行了比较,发现串级控制和前馈反馈控制可提高系统性能。
关键词:PID;串级;前馈反馈;参数整定;SimulinkDesign on Water Level Control in a TankAbstractThis thesis provides design methods of singleclosed-loop control system, cascade control system and feed forward control system about the controlled object a single water tank , and it achieves the goal of controlling level. For every kind of control system, simulation model is established by using simulation tool Matlab, simulation curves can analysis the performance of controlsystem, such as the maximum percent overshoot, settling time, attenuation rate and IAE. The design of single closed-loop control system includes designs of P, I, PI and PID. The controller parameter is tuned by frequency response of attenuation rate and the attenuation curve .All the control design methods included are compared by simulation curves and performance indexes and we finally find that cascade control and feed forward control are able to improve system’s performance.Keywords:PID;Cascade;Feedforward- feedback;Parameter tuning;Simulink目录摘要ABSTRACT (I)1设计要求及内容02单容水箱系统建模23单闭环控制系统设计53.1比例控制系统设计53.2积分控制系统设计73.3比例-积分控制系统设计93.4比例-积分-微分控制系统设计134串级控制控制方案设计175前馈控制方案设计196实验室水箱实验报告206.1压力单闭环实验206.2液位单闭环实验226.3上水箱液位和流量组成串级实验246.4前馈反馈控制实验277总结31参考文献31附录321设计要求及内容图1 单容水箱液位控制系统单容水箱液位控制系统如题图1所示。
基于模糊控制的水箱液位控制系统设计

基于模糊控制的水箱液位控制系统设计在工业中,水平液位控制是控制系统中的重要部分,它能够有效地保持水箱液位在特定的水平。
一个高效的液位控制系统可以帮助我们高效地实现水箱液位的控制从而避免浪费水资源,从而节约成本。
随着技术的进步,模糊控制已经开始成为一个重要的技术,它可以有效地支持水箱液位控制系统的构建与管理。
首先,本研究保留了传统水箱液位控制系统的基本结构,并使用模糊控制理论来优化控制系统从而实现精确的控制效果。
首先,在生成模糊规则的过程中,将采用梯度下降法和变量化规则抽象的相结合的方法来确定模糊控制参数,以最大化水箱液位控制效果。
接下来,在模糊控制的实现过程中,会使用PID算法,以及模糊规则生成器,让检测出来的反馈信号与模糊规则生成器控制信号进行比较,并结合反馈回路系数,以调整水箱液位控制系统的运行状态。
此外,在实现水箱液位控制系统的控制部分中,将采用两个独立的控制器对水箱的液位进行控制,其中一个主控制器采用传统的PID控制算法,并配合模糊控制算法进行控制;另一个子控制器则采用线性状态反馈算法,由两个控制器一起实现更好的全局水箱液位控制。
在本研究中,还提出了一种基于数字滤波及模糊控制的结合策略,以便更好地抑制系统噪声并实现更准确的水箱液位控制。
该策略中,首先会采用数字滤波技术来减少系统的噪声,然后再采用模糊控制算法来解决系统控制的实际问题。
最后,本研究中建立了一个模型仿真实验,主要用于检验在水箱液位控制方面的实际效果。
仿真实验包括模型的建立,模糊控制参数的确定,液位控制策略的调整,以及液位控制策略的比较等。
仿真结果表明,采用本研究中建立的模糊控制策略,可以有效地调节水箱液位,达到良好的控制效果,表明该模糊控制策略有效可靠。
综上所述,本文针对传统水箱液位控制系统的局限性,提出了一种基于模糊控制的水箱液位控制系统的设计方案,通过梯度下降法和变量化规则抽象的相结合的方法来确定模糊控制参数,以最大化液位控制的效果,并采用PID算法和模糊规则生成器来实现更加精确的水箱液位控制,经过仿真实验和结果分析,证明了该控制系统的有效性和可靠性。
单容水箱液位控制系统设计

单容水箱液位控制系统设计分类号密级UDC过程控制系统设计作业单容水箱液位控制系统设计学生姓名 xxxxxx 学号xxxxxxxxxxxx任课教师 xxxx院、系、中心工程学院自动化及测控系专业年级 xxxx级自动化提交日期 10 月日中国海洋大学文档历史单容水箱液位控制系统设计摘要本论文以单容水箱为被控对象,给出了单闭环控制系统、串级控制系统和前馈反馈控制系统的设计方案,实现对水箱液位的控制。
本论文还针对每种控制系统,在Matlab的Simulink中建立仿真模型进行仿真,得到仿真曲线,而且利用仿真曲线分析控制系统的性能,例如最大动态偏差、调节时间、衰减率和积分性能指标IAE等。
单闭环控制系统的设计包括P、I、PI和PID的设计。
本文分别经过衰减频率特性法(理论整定法)和衰减曲线法(工程整定法)对控制器参数进行了整定。
本论文还经过比较各控制系统的仿真曲线和系统性能指标,对各种控制系统设计方案进行了比较,发现串级控制和前馈反馈控制可提高系统性能。
关键词: PID;串级;前馈反馈;参数整定;SimulinkDesign on Water Level Control in a TankAbstractThis thesis provides design methods of single closed-loop control system, cascade control system and feed forward control system about the controlled object asingle water tank , and it achieves the goal of controlling level. For every kind of control system, simulation model is established by using simulation tool Matlab, simulation curves can analysis the performance of control system, such as the maximum percent overshoot, settling time, attenuation rate and IAE. The design of single closed-loop control system includes designs of P, I, PI and PID. The controller parameter is tuned by frequency response of attenuation rate and the attenuation curve .All the control design methods included are compared by simulation curves and performance indexes and we finally find that cascade control and feed forward control are able to improve system’s performance.Keywords:PID;Cascade;Feedforward- feedback;Parameter tuning;Simulink。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第6期(总第181期)2013年12月机械工程与自动化MECHANICAL ENGINEERING & AUTOMATIONNo.6Dec.文章编号:1672-6413(2013)06-0135-03单容水箱液位模糊控制系统的设计与研究杨 杰,齐向东(太原科技大学电子信息工程学院,山西 太原 030024)摘要:针对传统工业单容水箱液位控制过程中存在的稳定性差、响应慢等问题,提出了一种模糊控制方法对液位进行控制。
首先根据单容水箱液位的控制要求设计了模糊控制器,然后搭建了基于远程数据采集模块的计算机控制系统,最后在VB环境下,设计了单容水箱液位监控人机界面进行液位控制。
实验结果表明,在单容液位过程控制系统中,采用模糊控制与闭环PID控制相比,稳定性更好、响应速度更快,液位控制性能明显提高。
关键词:模糊控制;水箱液位控制;数据采集模块中图分类号:TP273+.4 文献标识码:A收稿日期:2013-04-17;修回日期:2013-05-18作者简介:杨杰(1987-),男,山西大同人,在读硕士研究生,主要从事智能拖动控制、工业智能化控制等方向的研究。
0 引言液位是工业生产过程中的四大热工参数之一,因此,液位控制已成为工业生产中研究的重要课题[1]。
传统的液位控制系统大多采用常规PID控制,由于常规PID控制器结构简单,使用方便,被广泛使用[2-6],但常规PID在系统参数、工作环境发生改变时控制效果较差,且液位控制系统对稳定性和快速性要求较高,这样不依赖数学模型的模糊控制给这类问题的解决带来了新思路[7]。
本文基于VB开发环境设计了一个采用模糊控制方法的液位控制系统,主要包括硬件系统搭建和软件开发设计。
以THSA-I型过程控制综合自动化控制系统实验平台为研究平台,采用该平台的计算机作为直接控制器,通过数据采集模块实现计算机和传感器或执行器之间的数据转换,通过设计模糊控制器,在VB开发环境实现液位控制。
实验分别采用常规闭环PID控制和模糊控制对单容水箱液位进行控制,并对比控制效果,验证了模糊控制在单容水箱液位控制上的优越性。
1 单容液位过程模糊控制器设计1.1 确定模糊控制器的结构根据单容液位过程控制的特点和控制要求,模糊控制器选用二维结构,如图1所示。
系统给定r,以液位的偏差e和液位偏差的变化ec为输入变量,经过量化后得到E、EC,然后经过控制表得到控制量的数字量UC,经过去模糊化z-1得到输出量u,控制液位过程。
其中k1、k2、k3是对应变化中的比例系数。
图1 离散控制器结构框图1.2 确定输入输出变量的基本论域在单容液位控制系统中,液位的给定值为Sp,由液位传感器测量并变化的水位值为PV,则可以得到水位偏差E和水位偏差的变化EC为:E(k)=PV(k)-Sp。
(1)………………………EC(k)=E(k)-E(k-1)。
(2)…………………将E(k)和EC(k)作为液位控制器的输入量,输出量u为执行器电动调节阀的开度。
根据实验情况,考虑到传感器的偏差,确定输入和输出的论域,要求液位偏差E的范围为[-15,+15],偏差变化EC的范围为[-0.1,+0.1]。
液位控制量为输出变量u(即电动阀的开度),它的范围为0%~100%,相应的控制信号为4mA~20mA。
1.3 定义模糊子集及隶属函数在本设计中,输入变量E的模糊子集为{负大,负中,负小,零,正小,正中,正大}、EC的模糊子集为{负大,负中,负小,零,正小,正中,正大};输出控制量u的模糊子集为{负大,负中,负小,零,正小,正中,正大}。
1.4 建立模糊控制规则表当偏差为负大时,若偏差变化为负,这时偏差有减小的趋势,为尽快地消除已有的负大偏差并抑制偏差变大,因此,控制量的变化取负大;当偏差为负中时,控制量的变化应该使偏差尽快消除,基于该原则,控制量的变化选取与偏差为负大时相同;若偏差变化为正时,系统本身有消除负小偏差的趋势,选取控制量变化为正小即可。
根据上述选取控制量变化的原则就可以确定单容液位模糊控制器的控制规则表,如表1所示。
表1 控制规则表(u)EECNB NM NS ZO PS PM PBNB NB NB NM NM NS ZO ZONM NB NB NM NS NS ZO ZONS NB NM NS NS ZO PS PSZO NM NM NS ZO PS PM PMPS NM NS ZO PS PS PM PBPM ZO ZO PS PS PM PB PBPB ZO ZO PS PM PM PB PB2 液位控制系统的实现2.1 硬件系统组成本设计系统是在“THSA-1型过程控制综合自动化控制系统实验平台”上搭建起来的,由实验控制对象、实验控制台及上位监控PC机3部分组成。
“THSA-1型过程控制综合自动化控制系统实验平台”是一套集自动化仪表技术、计算机技术、通讯技术、自动控制技术及现场总线技术为一体的多功能实验设备。
液位控制系统组成框图如图2所示。
图2 液位控制系统组成框图通过标度转化,将液位高度信号转化为1V~5V的电压信号,由ICP7017采集传送给计算机,计算机调用相应的算法计算后,将控制信号再次经过标度转化变换成4mA~20mA信号,由ICP7024传送给电动调节阀,最终通过控制阀门的开度达到控制液位高度的目的。
2.2 软件设计及实现目前,液位过程控制主要采用PID控制,本文为验证模糊控制器的优良性,在VB开发环境下,先设计闭环PID控制窗口,然后同模糊控制对比控制效果。
闭环PID控制界面及控制效果如图3所示。
模糊控制测试窗口包含以下功能:①可以设置采样周期与液位设定值;②有启动和停止功能;③能够显示水箱的液位实时曲线;④可以设置模糊控制器量化因子和比例因子。
模糊控制测试窗口如图4所示。
3 实验数据分析为了达到更好的控制效果,需要改变模糊控制器中的输入量化因子和输出比例因子。
根据分析输入输出论域的变化及所设置的液位设定值将偏差量化因子Ke设为0.8。
然后通过实验比较和对水箱的实际观察,决定偏差变化量化因子Kec的取值为60。
图3 闭环PID测试窗口图4 模糊控制测试窗口通过对比闭环PID控制和模糊控制两组实验的实验结果,分析两种控制的优劣。
将两组控制液位曲线在同一坐标下进行比较,如图5所示。
图5 PID与模糊控制比较图从图5中可以看出,在相同的条件下,比例微分PD控制有较大超调,有震荡,但反应速度较比例积分PI的速度要快;虽然比例积分PI反应速度较慢,但动态品质较好且能消除静态偏差。
模糊控制没有超调,且上升速度和稳定速度都是最快的,但存在静态偏差,由于传感器有误差,因此测量值有震荡。
总之,可以看出模糊控制方法对单容水箱液位的控制效果要比常规闭环PID控制的效果更好,提高了控制系统的快速性,保证了系统的稳定性,达到了较好的控制效果,符合单容水箱液位控制的要求。
·631·机械工程与自动化 2013年第6期 4 结论本文针对传统工业单容水箱液位控制过程中存在的稳定性差、响应慢等问题,提出了一种模糊控制方法对液位进行控制,并设计了单容液位控制系统。
在相同实验条件下,采用传统方法与本文提出的方法分别对单容液位进行控制,通过实验验证了本文采用的模糊控制与闭环PID控制的效果相比,稳定性更好、响应速度更快,对液位控制的控制性能明显提高。
参考文献:[1] 欣斯基.过程控制系统[M].萧德云,吕伯明,译.北京:清华大学出版社,2004.[2] 杨国安.数字控制系统:分析、设计与实现[M].西安:西安交通大学出版社,2008.[3] 魏巍,陈虎,赵贵,等.水箱液位控制系统建模与其PID控制器设计[J].中国科技信息,2008(10):31-32.[4] 张玲霞,李学军,李杰.基于组态王的液位控制系统仿真实验[J].长春大学学报,2010(4):61-64.[5] 任俊杰,李红星,李嫒.基于PLC和组态王的过程控制实验系统[J].实验室研究与探索,2010(5):16-18.[6] 匡芬芳.OPC技术在液位控制中的应用[J].自动化仪表,2011(6):46-49.[7] 宋春宁,李荣军.三容液位实验装置模糊控制的实现[J].自动化与仪表,2011(7):28-31.Design and Research of Fuzzy Control System for Single Tank Liquid LevelYANG Jie,QI Xiang-dong(School of Electronic Information Engineering,Taiyuan University of Science and Technology,Taiyuan 030024,China)Abstract:To the problems of poor stability and slow response in the traditional industrial single water tank control,this paperpresents a fuzzy control method to control the liquid level.Firstly,a fuzzy controller is designed based on the single-tank water levelcontrol requirements,and then a computer control system based on remote data acquisition modules is built,finally in the VBenvironment,the single tank water level monitoring human-machine interface is designed to control the liquid level.The experimentalresults show that the fuzzy control system is stable in performance and rapid in response in the single tank liquid level processcontrol,compared with closed-loop PID control,and the liquid level control performance is improved obviously.Key words:fuzzy control;water tank level control;data acq櫆櫆櫆櫆櫆櫆櫆櫆櫆櫆櫆櫆櫆櫆櫆櫆櫆櫆櫆櫆櫆櫆櫆櫆櫆櫆櫆櫆櫆櫆櫆櫆櫆櫆櫆櫆櫆櫆櫆櫆櫆櫆櫆櫆櫆櫆櫆櫆櫆櫆櫆uisitionmodule(上接第134页) Z方向加载时3个方向的标定斜率分别为:X:0.009 1;Y:0.004 2;Z:0.025 9。