坐标方位角和坐标正反算 ppt课件
坐标正反算

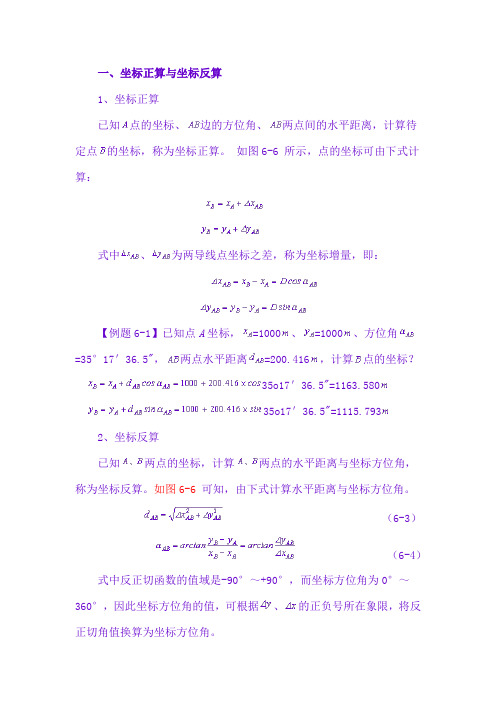
一、坐标正算与坐标反算 1、坐标正算 已知 点的坐标、 边的方位角、 两点间的水平距离,计算待 定点 的坐标,称为坐标正算。
如图 6-6 所示,点的坐标可由下式计 算:式中 、 为两导线点坐标之差,称为坐标增量,即:【例题 6-1】已知点 A 坐标, =1000 、 =1000 、方位角 =35°17'36.5", 两点水平距离 =200.416 ,计算 点的坐标?35o17'36.5"=1163.580 35o17'36.5"=1115.793 2、坐标反算 已知 两点的坐标,计算 两点的水平距离与坐标方位角, 称为坐标反算。
如图 6-6 可知,由下式计算水平距离与坐标方位角。
(6-3) (6-4) 式中反正切函数的值域是-90°~+90°,而坐标方位角为 0°~ 360°,因此坐标方位角的值,可根据 、 的正负号所在象限,将反 正切角值换算为坐标方位角。
【例题 6-2】 =3712232.528 、 =523620.436 、 =3712227.860 、 =523611.598 ,计算坐标方位角计算坐标方位角、水平距离 。
=62°09'29.4"+180°=242°09'29.4"注意:一直线有两个方向,存在两个方位角,式中:、的计算是过 A 点坐标纵轴至直线 的坐标方位角,若所求坐标方位角为,则应是 A 点坐标减 点坐标。
坐标正算与反算,可以利用普通科学电子计算器的极坐标和直角坐标相互转换功能计算,普通科学电子计算器的类型比较多,操作方法不相同,下面介绍一种方法。
【例题 6-3】坐标反算,已知 =2365.16 、 =1181.77 、=1771.03 、 =1719.24 ,试计算坐标方位角 、水平距离 。
键入 1771.03-2365.16 按等号键[=]等于纵坐标增量,按储存键[ ],键入 1719.24-1181.77 按等号键[=]等于横坐标增量,按[ ]键输入,按[ ]显示横坐标增量,按[ ]键输入,按第二功能键[2ndF],再按[ ]键,屏显为距离,再按[ ]键,屏显为方位角。
方位角与坐标

幻灯片128
第二节直线定向
确定直线与标准方向之间的水平角度,称为直线定向。
128 幻灯片129
一、标准方向
1.真子午线方向
过地球表面某点的真子午线的切线方向,称为该点的真子午线方向。
2.磁子午线方向
磁子午线方向是在地球磁场作用下,磁针在某点自由静止时其轴线所指的方向。
3.坐标纵轴方向
在高斯平面直角坐标系中,坐标纵轴线方向就是地面点所在投影带的中央子午线方向。
129
131
幻灯片132
四、正、反坐标方位角
五.坐标方位角的推算
132
幻灯片133
六、象限角
1.象限角
某直线与x轴北南方向所夹的锐角(0˚~90˚),再冠以象限符号,称为该直线的象限角R。
133 幻灯片134
2.坐标方位角与象限角的换算关系
134 幻灯片135
第三节坐标正算与坐标反算。
坐标方位角 课件
7
x
P2 P1 y
o 高斯平面直角坐标系
直线定向的目的?
P1 P3
D P2
A
8
直线方向的表示方法
1、方位角
1)方位角的定义
2 • 从直线起点的标准方向北端起,
顺时针方向量至直线的水平夹角, 称为该直线的方位角;其角值范 围为0°~ 360°
2
标准方向北端 2
方位角
2 2
1
2
9
标 准 方 向
10
真子午线方向
真方位角(A)
磁子午线方向
磁方位角(Am)
坐标纵轴方向
坐标方位角( α )
真北 坐标北
磁北
Am A
α
1
由于地面各点的真北(或磁北) 方向互不平行,用真(磁)方 位角表示直线方向会给方位角 的推算带来不便,所以在一般 测量工作中,常采用坐标方位 角来表示直线方向。
13
三、坐标方位角的推算
α12已知,通过连测求得12边与23边的连接角为β2 (右角)、 23边与34边的连接角为β3(左角),现推算α23、α34
x
α12 1
x
α23
x
2
α34
β3
β2
3
前进方向 4
14
由图分析
由图中分析可知
x
前进方向
x
α23
x
4
2
α12
α21
α34
β3
1
β2
3
α32
23 21 2 12 180 2
• 如图所示,已知AB边的坐标方位角为150°30′,观测转折角如图所示, 计算DE边的坐标方位角
《工程测量方位角》课件

采取有效的误差补偿措施
误差识别
通过数据分析识别出主要的误差源,为补偿措施提供依 据。
误差补偿算法
开发或采用成熟的误差补偿算法,对测量数据进行处理 ,减小误差影响。
06
工程测量方位角的发展趋 势与展望
智能化测量技术
自动化和智能化是工程测量发展的必 然趋势,智能化测量技术将进一步提 高测量精度和效率,减少人为误差和 劳动强度。
陀螺仪法
总结词
利用陀螺仪的特性,通过测量角度变化计算方位角。
详细描述
陀螺仪法是一种利用陀螺仪的特性来计算方位角的方法。陀螺仪可以感知方向的变化,通过连续测量方向的变化 ,可以计算出物体的方位角。这种方法在航空、航海、车辆导航等领域应用较多,尤其是在需要高精度定位和导 航的场合。
03
方位角在工程测量中的应 用
智能化测量技术将结合机器视觉、人 工智能等技术,实现测量数据的自动 处理、分析和挖掘,为工程建设提供 更加全面和准确的数据支持。
遥感技术应用
遥感技术以其大面积同步观测、信息丰富、成像快速等优点在工程测量中得到广 泛应用。
遥感技术将进一步提高分辨率和精度,实现动态监测和实时反馈,为工程测量提 供更加实时和准确的数据源。
读数误差
由于人眼分辨能力有限,在读取测量数据时可能存在一定的 误差。
环境因素导致的误差
温度变化
工程测量中,环境温度的变化可能导 致测量仪器的性能发生变化,从而影 响测量结果。
风力影响
在户外进行工程测量时,风力可能导 致测量仪器的稳定性变差,从而影响 测量结果。
05
提高方位角测量精度的措 施
选择合适的测量仪器
通过已知点的坐标和方位角,计算出其他点的坐标。
详细描述
坐标正反算
【例题6-3】坐标反算,已知 =2365.16 、 =1181.77 、 =1771.03 、 =1719.24 ,试计算坐标方位角 、水平距离 。
键入1771.03-2365.16按等号键[=]等于纵坐标增量,按储存键[ ],
【例题6-2】 =3712232.528 、 =523620.436 、 =3712227.860 、 =523611.598 ,计算坐标方位角计算坐标方位角 、水平距离 。
=62°09'29.4"+180°=242°09'29.4"
注意:一直线有两个方向,存在两个方位角,式中: 、 的计算是过A点坐标纵轴至直线 的坐标方位角,若所求坐标方位角为 ,则应是A点坐标减 点坐标。
8、系统误差影响观测值的准确度,偶然误差影响观测值的精密度。…………………………()
9、经纬仪整平的目的是使视线水平。……………………………………………………………()
10、用一般方法测设水平角时,应采用盘左盘右取中的方法。………………………………()
11、高程测量时,测区位于半径为10km的范围内时,可以用水平面代替水准面。…………()
4、视准轴是目镜光心与物镜光心的连线。………………………………………………………()
5、方位角的取值范围为0°~±180°。………………………………………………………()
6、象限角的取值范围为0°~±90°。………………………………………………………()
7、双盘位观测某个方向的竖直角可以消除竖盘指标差的影响°。……………………………()
32、测绘地形图时,碎部点的高程注记在点的右侧、字头应。
坐标正反算

坐标正反算一、坐标正算与坐标反算1、坐标正算已知点的坐标、边的方位角、两点间的水平距离,计算待定点的坐标,称为坐标正算。
如图6-6所示,点的坐标可由下式计算:式中、为两导线点坐标之差,称为坐标增量,即:=1000、=1000、方位角【例题6-1】已知点A坐标,=35°17'36.5\,2、坐标反算已知两点的坐标,计算两点水平距离=200.416,计算点的坐标?35o17'36.5\35o17'36.5\两点的水平距离与坐标方位角,称为坐标反算。
如图6-6可知,由下式计算水平距离与坐标方位角。
(6-3)(6-4)式中反正切函数的值域是-90°~+90°,而坐标方位角为0°~360°,因此坐标方位角的值,可根据正切角值换算为坐标方位角。
、的正负号所在象限,将反【例题6-2】=3712227.860、、水平距离=3712232.528、=523620.436、=523611.598,计算坐标方位角计算坐标方位角。
=62°09'29.4\29.4\注意:一直线有两个方向,存在两个方位角,式中:、的计算是过A点坐标纵轴至直线的坐标方位角,若所求坐标方位角为,则应是A点坐标减点坐标。
坐标正算与反算,可以利用普通科学电子计算器的极坐标和直角坐标相互转换功能计算,普通科学电子计算器的类型比较多,操作方法不相同,下面介绍一种方法。
【例题6-3】坐标反算,已知=1771.03、=2365.16、=1181.77、、水平距离。
=1719.24,试计算坐标方位角键入1771.03-2365.16按等号键[=]等于纵坐标增量,按储存键[],键入1719.24-1181.77按等号键[=]等于横坐标增量,按[]键输入,按[]显示横坐标增量,按[]键输入,按第二功能键[2ndF],再按[]键,屏显为距离,再按[]键,屏显为方位角。
【例题6-4】坐标正算,已知坐标方位角=200.40,试计算纵坐标增量横坐标增量=294°42'51\,。
工程测量计算之-1坐标正反算详解

工程测量计算之-----(一)坐标正反算详解一、方位角、坐标方位角测量工作中、常用方位角来表示直线的方向。
方位角是由标准方向的北端起,顺时针方向度量到某直线的夹角,取值范围为0°-360°,如下图所示。
若标准方向为真子午线方向,则其方位角称为真方位角,用A表示真方位角;若标准方向为磁子午线方向,则其方位角称为磁方位角,用Am表示磁方位角。
若标准方向为坐标纵轴,则称其为坐标方位角,用α表示。
(在高斯直角坐标系中,由坐标纵轴方向的北端起,顺时针度量到直线间的夹角,称为该直线的坐标方位角,常简称方位角,用α表示。
)所以,我们测量中常说的方位角其实是坐标方位角,也就是X轴顺时针旋转至所在直线的角度。
二、象限角以基本方向北端或南端起算,顺时针或逆时针方向量至直线的水平角,称为象限角,用R表示。
象限角不但要表示角度大小,而且还要注明该直线所在的象限。
从坐标纵轴的北端或南端顺时针或逆时针起算至直线的锐角称为坐标象限角。
其角值变化从0°~90°,为了表示直线的方向,应分别注明北偏东、北偏西或南偏东、南偏西。
如北东85°,南西47°等。
显然,如果知道了直线的方位角,就可以换算出它的象限角,反之,知道了象限也就可以推算出方位角。
三、坐标正反算公式详解坐标正算根据直线的坐标方位角、边长和一个已知端点的坐标计算直线上另一端点坐标的过程。
或若两点间的平面位置关系由极坐标化为直角坐标,称为坐标正算。
1、坐标计算条件①起算点(定位点)的平面坐标(X0,Y0),②起算点至待求点的坐标方位角α,③起算点至待求点的平面距离D。
2、坐标计算过程坐标反算根据两已知点的平面坐标,计算该直线的方位角及两点间平面距离的过程。
或若两点间的平面位置关系由直角坐标化为极坐标,称为坐标反算。
α=arctan(△y / △x)D=√(△x*△x + △y*△y)其中,用计算器计算出的α称为象限角,之后还要根据△x、△y的正负号转换为坐标方位角。
高斯投影坐标正反算.ppt
2
4
6
8
高斯投影坐标正算(3)
dm0 = dX
dB =M
N cos B =N cos B
,
dq dB dq
M
c
m1 = N cos B
= V
cos B
子午线曲率半径
等量纬度定义式
m2
N 2
sin B cos B
m3
N b
cos3 B(1 t 2
2)
m4
N sin B cos3 24
y 2 dn4 dx
y4
N
cos M
B
(n1
3n3
y2
5n3
y4
)
2n2 y 4n4 y3
N cos B ( dn1 y dn3 y3 dn5 y5 )
M
dx
dx
dx
由恒等式两边对应系数相等,从而得待定系数的递推公式
n1
M N cos B
• 高斯平面直角坐标系: 区分为:自然坐标;国家统一坐标。(掌握两者的换算)
§4.9.2 正形投影的一般条件
一、长度比的通用公式推导
dS 2 (MdB)2 ( N cos Bdl )2
ds2 dx2 dy2
长度比平方为:
m2
ds dS
2
dx2 dy2 (MdB)2 (N cos
dn2 dx
y2 dn4 dx
y4
N
cos M
B
(n1
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
•
第四象限角:270°~360° (3π/2~2π)
坐标方位角和坐标正反算
坐标正算
• 已知坐标方位角和边 长,原点坐标为(XA, YA),那么计算坐标 (XB,YB)为 XB=x+sAB·cosaAB
• YB=y+sAB·sinaAB其 中aAB为方位角,sAB 为距离
坐标方位角和坐标正反算
坐标反算
已知两点坐标,求距离 SAB=√(XB-XA)²
(YB-YA)²
坐标方位角和坐标正反算
工程测量注意事项
•
建筑物定位测量前,应由建设项目法人提供规划测量
位测量并确认的建筑物角标的坐标,(包括书面通知和现
场坐标移交)角标一般为三点以上,其中两点作为定位测
量用,其余点作为校核用。
• ⑵所提供的角标施工单位应妥善保护,当角标位于建内或
坐标方位角和坐标正反算
坐标
• 坐标:直线的方向是用方位角来表示的,其中 以坐标北方向为基准方向,顺时针旋转到直线的 水平角度,称为该直线的坐标方位角。
•
象限角划分:第一象限角:0°~90° (0~π/2)
•
第二象限角:90°~180° (π/2~π)
•
第三象限角:180°~270° (πห้องสมุดไป่ตู้3π/2)
施工过程可能会破坏时,应在单体定位后,引至安全地方 固定好。
量定位,然后利用其余角标反向测量校核;属角标有误时, 应及时通知现场专业监理工程师和项目法人代表进一步证 实;属放样本身轴线有误,应重新放样。
坐标方位角和坐标正反算
坐标方位角和坐标正反算