ZK-4WD智能小车简介
基于无线控制的智能小车系统的设计毕业设计
基于无线控制的智能小车系统的设计摘要:本文针对基于无线控制的智能小车的设计和研究,首先对系统的总体设计加以介绍,概括了智能小车的主要作用及其工作模式,并介绍了智能小车的主要元器件;然后详细介绍了系统的硬件以及软件设计,硬件方面,重点研究了温度采集模块、红外避障模块和无线收发模块,软件方面详细讲解了上位机人机交互界面的设计、避障设计以及无线通信的数据处理;最后,总结了系统测试结果并对本设计的发展前景做了概述。
关键词:单片机;上位机;红外线;避障;温度检测;无线通信The intelligent car Based on wireless controlAbstract: In this paper, the overall description of the smart car, which is base on the wireless control, is introduced its design and research. First introduced is the overall design of the system, and describes the major function, operating mode and the main components of the smart car; then analyses the system's hardware and software design in detail. Hardware side, the focus is on the temperature acquisition module, infrared obstacle avoidance module and wireless transceiver module; The software has a detailed account of the host-computer interactive interface design, the design of the obstacle avoidance and wireless communication's data processing; Finally summaries up the test results of this system and has an overview of the prospects for the development of this design.Keywords: MCU; upper computer; Infrared ray; Obstacle avoidance; Temperature detection; Wireless communication1.绪论1.1课题的背景及意义1.1.1课题背景未来是充满科学技术的新时代,而智能化[1]正是科学技术的重要体现。
无人驾驶汽车介绍

产业链结构
无人驾驶汽车产业链包括上游的传感器、芯片等零部件制造商;中游的自动驾驶系统开发商和集成商 ;下游的汽车制造商、出行服务提供商和用户等。同时,政府、监管机构和相关行业协会等也在产业 链中发挥着重要作用。
跨国合作与竞争格局变化
合作
跨国汽车厂商、科技公司等纷纷加强 合作,共同研发和推广无人驾驶汽车 技术,推动全球交通出行方式的变革 。
竞争
随着技术的不断成熟和市场需求的增 长,无人驾驶汽车领域的竞争将日益 激烈,企业需要不断创新以保持竞争 优势。
感谢您的观看
THANKS
02
关键技术分析
传感器技术
激光雷达
通过发射激光束并测量反射回来的时间,精 确测量周围环境物体的距离和形状。
摄像头
捕捉道路图像,识别交通信号、车道线、行 人等关键信息。
毫米波雷达
利用毫米波探测周围物体,具有穿透雾、霾 、雨雪等恶劣天气的能力。
超声波传感器
通过发射超声波并测量反射回来的时间,探 测近距离障碍物。
无人驾驶汽车介绍
汇报人: 2023-12-22
目录 CONTENT
• 无人驾驶汽车概述 • 关键技术分析 • 典型应用场景探讨 • 产业链上下游企业分析 • 政策法规与伦理道德问题探讨 • 未来发展趋势预测与挑战分析
01
无人驾驶汽车概述
定义与发展历程
定义
无人驾驶汽车是一种通过先进的感知技术、决策算法和自动控制技术,实现车 辆在不需要人类驾驶的情况下,能够自动识别和应对交通环境中的各种情况, 并完成安全、有效的行驶任务的智能汽车。
ZK-4WD智能小车简介
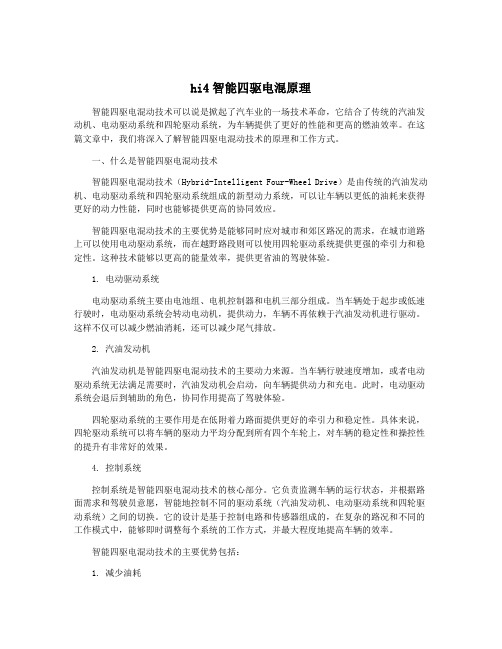
智能小车简介一、智能小车效果图二、智能小车各模块功能介绍1、小车底盘小车底盘是机器人最重要的载体,相当于人体的躯干,ZK—4WD小车平台采用差速转弯,非常灵活,可以实现原地打转。
小车平台大小刚好,可以承载一些如驱动器,控制器,电池,传感器等。
2、驱动模块我采用ST公司原装全新的L298N芯片及高质量铝电解电容,使电路稳定工作。
小车直流电机工作电流一般是200—400mA,有些更大。
如果一个小车是两个轮子,那么总的电流在400--800 mA左右,这些电机轮子都是要接受单片机指令执行相应动作,而市面有的单片机IO口一般只能提供5--10 mA的电流,直接驱动不了单片机,所以就需要一个驱动模块,就好像人的心脏功能。
3、控制模块我采用的控制器主控芯片是STC89C52属于标准的51核的单片机,STC12C5A60S2内带PWM,AD,1T运行速度(主流),集成USB转串可以直接用USB下载程序。
集成数码管,舵机,红外蔽障,12864,1602,无线模块等接口,板载输入按钮4、小车所需的能源可以用普通的AA5号电池,我采用低内阻的充电电磁套装,这是小车的动力之源,对外供电为7.2V。
这四部分都是必备的,有这四样东西,就可以让小车走起来,至于要怎么走,这个时候传感器就开始大发神威了!5、小车需要的各种传感器循迹传感器:一般用来识别黑白线,小车沿着这条黑白线行走,就需要循迹传感器原理:循迹传感器通常采用红外的方式,红外管发射出来的红外光通过地面(白色)反射回来,在接收管理收到信号,一旦碰到黑线,那么红外光都被吸收,接收管没有接收到信号,从而得知传感器是否压线:从而调整小车运行方向。
四路红外循迹模块:(可以通过换探头方式,改为蔽障方式)超声波蔽障测距传感器:通过超声波发射装置发出超声波,根据接收器接到超声波时的时间差就可以知道距离了,这与雷达测距原理相似。
超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播,途中遇到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。
杭州超薄型智能四向穿梭车原理结构

杭州超薄型智能四向穿梭车原理结构一、引言智能四向穿梭车是一种新型的物流运输设备,它具有超薄型、智能化、高效率等特点,广泛应用于各类工厂、仓库等场合。
本文将对杭州超薄型智能四向穿梭车的原理结构进行详细介绍。
二、原理结构1. 原理杭州超薄型智能四向穿梭车采用电动驱动方式,通过电机驱动轮胎前进或后退,并通过转向系统实现左右转弯。
同时,它配备了先进的传感器和控制系统,可以实现自主导航、避障和定位等功能。
2. 结构杭州超薄型智能四向穿梭车主要由以下组成部分:(1)底盘:底盘是整个车辆的基础结构,它由钢板焊接而成,并安装有电机、电池等部件。
(2)轮胎:轮胎是承载整个车辆重量和提供行驶动力的部件,它通常采用高弹性橡胶材料制造。
(3)转向系统:转向系统包括前轮转向机构和后轮转向机构,通过控制电机的转向角度实现左右转弯。
(4)传感器:传感器包括激光雷达、摄像头、超声波等多种类型,可以实现车辆的自主导航、避障和定位等功能。
(5)控制系统:控制系统是车辆的“大脑”,它由电脑、PLC等部件组成,可以对车辆进行实时监控和控制。
三、工作原理1. 自主导航杭州超薄型智能四向穿梭车采用激光雷达和摄像头等多种传感器,可以实现自主导航。
当车辆行驶到未知区域时,激光雷达会扫描周围环境并生成地图,在地图上标记出障碍物和通行区域;摄像头则可以识别路标和标志牌等信息,并根据这些信息确定车辆的位置。
通过这些传感器的协同作用,车辆可以自主规划路径并行驶到指定目的地。
2. 避障当杭州超薄型智能四向穿梭车遇到障碍物时,它会通过传感器检测障碍物的位置和形状,并根据这些信息调整行驶方向。
如果障碍物无法避让,则车辆会自动停止并发出警报。
3. 定位杭州超薄型智能四向穿梭车采用多种传感器实现定位功能,包括GPS、激光测距仪、惯性导航等。
这些传感器可以对车辆的位置和方向进行精确测量,并实时更新到控制系统中。
4. 货物运输杭州超薄型智能四向穿梭车可以根据任务需求自主规划路径,并通过电机驱动轮胎前进或后退,将货物从起点运输到终点。
小发明四驱车设计理念

小发明四驱车设计理念四驱车一直以来都是越野爱好者们的最爱,它们可以在崎岖不平的山路上自如穿行,也可以在泥泞的沼泽地上轻松通过。
然而,传统的四驱车在城市里行驶时却显得笨重,油耗高,驾驶体验也不尽人意。
为了解决这一问题,我设计了一款小发明四驱车,它集合了城市代步和越野性能于一身,让驾驶者在城市和野外都能享受到乐趣。
首先,小发明四驱车采用了轻量化设计,车身采用高强度材料制成,减轻了整车重量,提高了燃油经济性和行驶稳定性。
同时,车辆的底盘设计更加灵活,可以根据路况自如调整车身高度,适应不同的地形。
这样一来,小发明四驱车在城市里行驶时更加省油省力,而在野外越野时也能轻松应对各种挑战。
其次,小发明四驱车配备了智能驾驶系统,可以根据路况自动调整四驱模式,确保车辆始终保持最佳的性能状态。
同时,车辆还配备了先进的安全系统,包括自动刹车、车道偏离预警等功能,提高了驾驶者和乘客的安全性。
这样一来,无论是在城市里还是在野外,小发明四驱车都能为驾驶者提供安全可靠的行驶体验。
最后,小发明四驱车还具备了智能互联功能,可以通过手机App实时监控车辆状态、导航路线等信息,为驾驶者提供更加便捷的驾驶体验。
同时,车辆还配备了多媒体娱乐系统,让驾驶者和乘客在行驶中也能享受到丰富多彩的娱乐内容。
总的来说,小发明四驱车是一款集合了城市代步和越野性能的全能车辆,它不仅在城市里行驶省油省力,还能在野外越野自如。
通过轻量化设计、智能驾驶系统和智能互联功能的结合,小发明四驱车为驾驶者带来了全新的驾驶体验,让他们可以随心所欲地享受驾驶的乐趣。
相信随着科技的不断进步,小发明四驱车的设计理念将会得到更好的实现,为驾驶者带来更加便捷、安全、舒适的驾驶体验。
hi4智能四驱电混原理
hi4智能四驱电混原理智能四驱电混动技术可以说是掀起了汽车业的一场技术革命,它结合了传统的汽油发动机、电动驱动系统和四轮驱动系统,为车辆提供了更好的性能和更高的燃油效率。
在这篇文章中,我们将深入了解智能四驱电混动技术的原理和工作方式。
一、什么是智能四驱电混动技术智能四驱电混动技术(Hybrid-Intelligent Four-Wheel Drive)是由传统的汽油发动机、电动驱动系统和四轮驱动系统组成的新型动力系统,可以让车辆以更低的油耗来获得更好的动力性能,同时也能够提供更高的协同效应。
智能四驱电混动技术的主要优势是能够同时应对城市和郊区路况的需求,在城市道路上可以使用电动驱动系统,而在越野路段则可以使用四轮驱动系统提供更强的牵引力和稳定性。
这种技术能够以更高的能量效率,提供更省油的驾驶体验。
1. 电动驱动系统电动驱动系统主要由电池组、电机控制器和电机三部分组成。
当车辆处于起步或低速行驶时,电动驱动系统会转动电动机,提供动力,车辆不再依赖于汽油发动机进行驱动。
这样不仅可以减少燃油消耗,还可以减少尾气排放。
2. 汽油发动机汽油发动机是智能四驱电混动技术的主要动力来源。
当车辆行驶速度增加,或者电动驱动系统无法满足需要时,汽油发动机会启动,向车辆提供动力和充电。
此时,电动驱动系统会退后到辅助的角色,协同作用提高了驾驶体验。
四轮驱动系统的主要作用是在低附着力路面提供更好的牵引力和稳定性。
具体来说,四轮驱动系统可以将车辆的驱动力平均分配到所有四个车轮上,对车辆的稳定性和操控性的提升有非常好的效果。
4. 控制系统控制系统是智能四驱电混动技术的核心部分。
它负责监测车辆的运行状态,并根据路面需求和驾驶员意愿,智能地控制不同的驱动系统(汽油发动机、电动驱动系统和四轮驱动系统)之间的切换。
它的设计是基于控制电路和传感器组成的,在复杂的路况和不同的工作模式中,能够即时调整每个系统的工作方式,并最大程度地提高车辆的效率。
四向车介绍
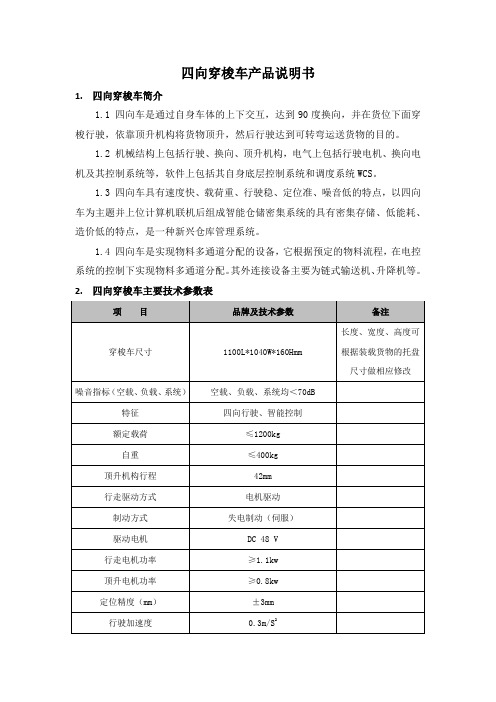
四向穿梭车产品说明书1.四向穿梭车简介1.1 四向车是通过自身车体的上下交互,达到90度换向,并在货位下面穿梭行驶,依靠顶升机构将货物顶升,然后行驶达到可转弯运送货物的目的。
1.2 机械结构上包括行驶、换向、顶升机构,电气上包括行驶电机、换向电机及其控制系统等,软件上包括其自身底层控制系统和调度系统WCS。
1.3 四向车具有速度快、载荷重、行驶稳、定位准、噪音低的特点,以四向车为主题并上位计算机联机后组成智能仓储密集系统的具有密集存储、低能耗、造价低的特点,是一种新兴仓库管理系统。
1.4 四向车是实现物料多通道分配的设备,它根据预定的物料流程,在电控系统的控制下实现物料多通道分配。
其外连接设备主要为链式输送机、升降机等。
2.四向穿梭车主要技术参数表3.主要零部件选用四向穿梭车器件选型严格遵循“先进、可靠、成熟、易用”的标准进行甄选,为方案设计提供保障。
本电控系统方案主要器件选型如下表:4.设备通用要求4.1 使用环境➢物流中心温度:0° C ~ 45° C;➢物流中心湿度:30% ~ 90%(无凝露)。
4.2 电力需求➢电力网络为TN-S网络(三相五线制,3-ph,N,PE);➢在下列供电条件下,系统应能全负荷或无负荷正常运行;➢电压:三相380V AC,±10%➢单相220V AC,±10%➢频率:50Hz,±1Hz5.对外部设备的要求5.1 货架结构及安装要求货架结构图子巷道货架结构子巷道(放货巷道)采用压榨式的折弯板加牛腿梁的形式。
母巷道(行驶轨道)货架结构5.1.1 货架生产要求:轨道:轨道每6米长度误差小于±2mm;挠度小于3‰;直线度每6米不超过2mm。
支撑立柱:立柱因承载,产生垂直方向上的弯曲变形,变形量可以通过目测查看到,此情况下禁止使用。
5.2 托盘的承载与变形5.2.1 托盘种类:塑料托盘、木托盘、钢质托盘。
5.2.2 托盘使用温度范围:托盘在0℃至~45℃的温度范围内正常使用。
四驱车制作方法
四驱车制作方法1. 简介四驱车(Four-wheel drive,简称4WD)是一种车辆传动方式,它通过驱动四个车轮来提供更好的牵引力和操控性能。
在一些越野和恶劣路况条件下,四驱车比传统的两驱车具有更强的通过能力和稳定性。
本文将介绍如何制作一辆简单的四驱车。
2. 材料准备在制作四驱车前,我们需要准备以下材料和工具:•1个遥控小车底盘•4个电机•4个轮胎•1个遥控器•1个电池组•线缆和连接器•一些螺丝和螺母•螺丝刀和扳手•需要焊接的工具(如果需要)3. 制作步骤步骤1:安装电机和轮胎首先,将电机安装在小车底盘的四个角落。
使用螺丝和螺母固定电机,确保它们牢固地固定在底盘上。
然后,将轮胎安装在每个电机的轮轴上,确保轮胎能够自由旋转。
步骤2:连接电机和电池使用线缆和连接器将电机与电池组连接起来。
根据电机和电池的规格,选择合适的线缆和连接器进行连接。
确保连接牢固,并检查电机是否能够正常工作。
步骤3:安装遥控器将遥控器的接收器安装在小车底盘上,然后将遥控器与接收器进行配对。
根据遥控器和接收器的说明书,按照指示进行操作。
确保遥控器与接收器能够正常通信。
步骤4:测试和调整在完成所有安装步骤后,测试四驱车的功能。
使用遥控器控制四驱车的前进、后退和转向。
如果发现问题,可以根据需要调整电机、轮胎或遥控器的设置,直到达到所需的性能。
4. 注意事项在制作四驱车时,需要注意以下事项:•确保电机和电池的规格能够满足四驱车的需求,避免过载或电力不足的问题。
•在焊接电路时,需要注意安全,避免触电或火灾等意外事故。
•在测试和调整四驱车时,保持足够的空间和安全距离,避免撞击或伤害自己和他人。
5. 总结通过按照上述步骤制作,我们可以制造一辆简单的四驱车。
可以根据个人的需求和兴趣,对四驱车进行改进和升级,以提高其性能和功能。
制作四驱车不仅是一项有趣的挑战,还可以帮助我们理解车辆的原理和机械结构。
祝你制作成功并享受四驱车带来的乐趣!。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
智能小车简介
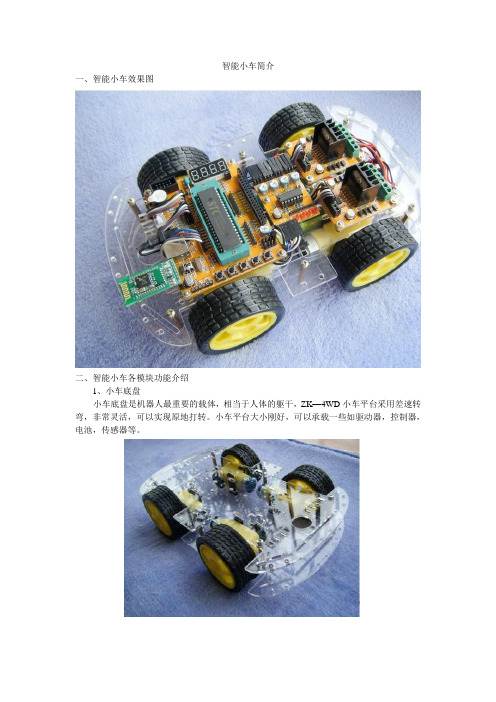
一、智能小车效果图
二、智能小车各模块功能介绍
1、小车底盘
小车底盘是机器人最重要的载体,相当于人体的躯干,ZK—4WD小车平台采用差速转弯,非常灵活,可以实现原地打转。
小车平台大小刚好,可以承载一些如驱动器,控制器,电池,传感器等。
2、驱动模块
我采用ST公司原装全新的L298N芯片及高质量铝电解电容,使电路稳定工作。
小车直流电机工作电流一般是200—400mA,有些更大。
如果一个小车是两个轮子,那么总的电流在400--800 mA左右,这些电机轮子都是要接受单片机指令执行相应动作,而市面有的单片机IO口一般只能提供5--10 mA的电流,直接驱动不了单片机,所以就需要一个驱动模块,就好像人的心脏功能。
3、控制模块
我采用的控制器主控芯片是STC89C52属于标准的51核的单片机,STC12C5A60S2内带PWM,AD,1T运行速度(主流),集成USB转串可以直接用USB下载程序。
集成数码管,舵机,红外蔽障,12864,1602,无线模块等接口,板载输入按钮
4、小车所需的能源
可以用普通的AA5号电池,我采用低内阻的充电电磁套装,这是小车的动力之源,对外供电为7.2V。
这四部分都是必备的,有这四样东西,就可以让小车走起来,至于要怎么走,这个时候传感器就开始大发神威了!
5、小车需要的各种传感器
循迹传感器:一般用来识别黑白线,小车沿着这条黑白线行走,就需要循迹传感器
原理:循迹传感器通常采用红外的方式,红外管发射出来的红外光通过地面(白色)反射回来,在接收管理收到信号,一旦碰到黑线,那么红外光都被吸收,接收管没有接收到信号,从而得知传感器是否压线:从而调整小车运行方向。
四路红外循迹模块:(可以通过换探头方式,改为蔽障方式)
超声波蔽障测距传感器:通过超声波发射装置发出超声波,根据接收器接到超声波时的时间差就可以知道距离了,这与雷达测距原理相似。
超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播,途中遇到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。
通过程序代码的修改,可以调节小车蔽障的距离。
SG90舵机:里面有一个信号调制芯片,主要通过控制信号获得直流偏置电压,电压差的正负输出到电机的驱动芯片,决定电机的正反转。
当电压差为0时,电机停止转动。
舵机内带反馈装置,又名伺服电机,由于有反馈,所以很容易控制,与我们的超声波模块组成,那就是绝配。
蓝牙无线传感器:可以用Android智能手机控制小车运行,Android手机用内置蓝牙与蓝牙无线模块配对,手机发出指令,无线蓝牙模块接收指令。
当单片机接收到蓝牙无线模块发出的指令后,执行相应的解码动作,从而控制小车。
智能小车循迹简介
一、小车循迹效果图
二、小车循迹需要的模块
1、驱动模块
我采用ST公司原装全新的L298N
芯片及高质量铝电解电容,使电路稳定
工作。
小车直流电机工作电流一般是
200—400mA,有些更大。
如果一个小
车是两个轮子,那么总的电流在
400--800 mA左右,这些电机轮子都是
要接受单片机指令执行相应动作,而市
面有的单片机IO口一般只能提供5--10
mA的电流,直接驱动不了单片机,所
以就需要一个驱动模块,就好像人的心
脏功能,给人体的各个器官提供能量。
2、控制模块
3、四路红外线探测系统模块
三、小车需要的传感器
我采用的控制器主控芯片
是STC89C52属于标准的51核的
单片机,STC12C5A60S2内带PWM,AD,1T运行速度(主流),集成USB转串可以直接用USB
下载程序。
集成数码管,舵机,
红外蔽障,12864,1602,无线模
块等接口,板载输入按钮。
它好
比人的大脑,起到控制作用。
这个模块相当于人的视觉系统,它把看到的事物转换成信号传给控制模块。
它的应用范围有:1、智能化小车:循迹、蔽障、防跌落;
2、智能化小型机器人和智能化小型机械手:物料检测、灰度检测、颜色检测。
循迹传感器:一般用来
识别黑白线,小车沿着这条
黑白线行走,就需要循迹传
感器
原理:循迹传感器通常
采用红外的方式,红外管发
射出来的红外光通过地面
(白色)反射回来,在接收
管理收到信号,一旦碰到黑
线,那么红外光都被吸收,
接收管没有接收到信号,从
而得知传感器是否压线:从
而调整小车运行方向。
四路
红外循迹模块:(可以通过换
探头方式,改为蔽障方式)
四、小车需要的其它配件
1、小车底盘
2、小车所需的能源
这四部分都是必备的,有这四样东西,就可以让小车走起来,至于要怎么走,这个时候就要用C 语言编程了。
调节程序代码,就可以改变小车的速度。
小车沿着黑线行进,黑线两边各有一个红外探头。
若左边探头接收到了黑线信号,那就左拐(调节程序代码,让左边两个轮子的速度慢些,右边两个轮子的速度快些,就可以实现左拐)。
若右边探头接收到了黑线信号,那就右拐(调节程序代码,让右边两个轮子的速度慢些,左边两个轮子的速度快些,就可以实现右拐)。
小车底盘是机器人最重要的载体,相当于人体的躯干,ZK —4WD 小车平台采用差速转弯,非常灵活,可以实现原地打转。
小车平台大小刚好,可以承载一些如驱动器,控制器,电池,传感器等。
可以用普通的AA5号电池,我采用低内阻的充电电磁套装,这是小车的动力之源,对外供电为7.2V 。