基于高速开关阀的转速控制系统建模与仿真
基于PWM的高速开关阀式电液伺服系统的非线性时域仿真研究

控 制方 式的高 速开关阀式电l 伺服 系统进行 了仿 真研究 。分 析了系统的结构框图和工作原 理 ;建立 醯
了系统 的非线性财域 仿真模 型 ;重点研究 了村制频率 和 阍的开关特 性对 系统控 制性能的影响 :防真结果 征驸 了率 文有美观点
关键词 :数 字仿 真 ;P ' g M;高速开关 阀;电液伺服系统 中圈分类 号:T 2 1 P7 文献标识码 : 文章编号 :】0 38 2x )3 1 —3 0】一 8 】lI2 —00 J
MA L B控制 工具销命 令 相结 合 的方法 ,对 基 于 P TA wM 的高速开关 阀式 电液伺 服系统进行 仿真研 究 以往 有 关 研 究 高 速 开 关 阀 式 控 制 系统 的 文 献 中 .一般把 0 环 节简 化 为 比例环节 ,因而大 都
微 机周期性地 对作动器 的 目标位 置信 号 r和作动 器实 际位置反馈 信号 进 行采 样 、 比较 , 得到 误差信号 e 然 ; 后该 信号进 入控制器按一定 的控制率进行 运算 , 得到控
基于AMESim的自动液力变速器高速开关阀动态仿真研究

( 1 . Co l l e g e o f Me c h a n i c a l E n g i n e e r i n g,Gn iz h o u Un i v e r s i t y ,Gu i y ng a 5 5 0 0 2 5,C h i n a ;2 . S c h o o l o f Ra i l T r a n s i t ,
( 1 . 贵州大学 机械 工程 学院, 贵 州贵 阳 5 5 0 0 2 5 ;2 . 贵阳职业技术学院 轨道 交通分院 , 贵 州贵 阳 5 5 0 0 0 5 ; 3 . 贵 州凯星液力传 动机 械有限公 司, 贵 州遵 义 5 6 3 0 0 3 )
捕要 :以某型 自动i 受 力变速器高速开关电磁 阀为研究对象 ,针对建模 和开关 阀部分 主要参数对响应特性 的影 响进行了研究 。分 析高速开关阀的工作原理 , 建立 了机械 、电路 和磁路 数学模 型,运 用 A M E s i m ̄ : 建立了高速开关阀仿真模型 ,并分析 了线 圈 匝数 、励磁电压 、介质压力等参数对高速开关阎位移响应的影 响。仿 真结果 与性 能检测试 验数据对 比表 明 , 仿 真模 型能够 比较 准确地 描述 开关 阀的动态性能 ,为高速开关 阀特性和参数优化 的研究提 供理论 参考 。 关键词 :高速 开关 阀 ; A M E S i m;响应 特性
Ma c h i n e r y C o . ,L t d ,Z u n y i 5 6 3 0 0 3 ,C h i n a )
Abs t r a c t :T he i s s u e o f mo d e l i ng a n d s i mu l a t i o n o f a k i n d o f h i g h s p e e d o n — o f v a l v e u s e d f o r a c e r t a i n a u t o ma i t c h y d r a u l i c t r a n s mi s s i o n . T h e wo r k i I l g p in r c i p l e o f t h e v a l v e a r e i n t r o d u c e d .Ac c o r d i n g t o he t na a l y s i s o f he t p in r c i p l e o f he t h i g h s e  ̄t p o n - o f y a l v e, t he
基于PWM控制的ESP高速开关阀动力学特性研究与仿真
基于PWM控制的ESP高速开关阀动力学特性研究与仿真王冬良;陈南;刘远伟【摘要】汽车ESP中采用的高速开关阀是二位二通电磁阀,通过电磁阀的开启或关闭来实现车轮轮缸的增压、保压和减压.在(10~100)Hz低频范围内,高速开关阀虽实现了平均开度控制,但阀还是会出现时开时闭的状态,且电磁阀在状态切换中存在压力响应滞后现象.为了提高液压系统的控制精度,提出了脉宽调制(Pulse Width Modulation,PWM)控制高速开关电磁阀的仿真模型,研究分析了调制频率在高频情况下,通过改变PWM下的占空比,实现高速开关阀压力精确控制的效果,达到ESP 制动压力响应快且平稳.【期刊名称】《机械设计与制造》【年(卷),期】2015(000)012【总页数】4页(P87-90)【关键词】PWM控制;ESP;高速开关电磁阀;仿真【作者】王冬良;陈南;刘远伟【作者单位】三江学院机械工程学院,江苏南京 210012;东南大学机械工程学院,江苏南京 211189;三江学院机械工程学院,江苏南京 210012【正文语种】中文【中图分类】TH16;U46摘.:汽车ESP中采用的高速开关阀是二位二通电磁阀,通过电磁阀的开启或关闭来实现车轮轮缸的增压、保压和减压。
在(10~100)Hz低频范围内,高速开关阀虽实现了平均开度控制,但阀还是会出现时开时闭的状态,且电磁阀在状态切换中存在压力响应滞后现象。
为了提高液压系统的控制精度,提出了脉宽调制(Pulse Width Modulation,PWM)控制高速开关电磁阀的仿真模型,研究分析了调制频率在高频情况下,通过改变PWM下的占空比,实现高速开关阀压力精确控制的效果,达到ESP制动压力响应快且平稳。
汽车电子稳定性程序(Electronic Stability Program,ESP)是改善汽车行驶稳定性的一种主动安全系统[1]。
ESP系统是制动防抱死系统(Anti-lock Braking System,ABS)和 ABS/驱动防滑控制系统(Acceleration Slip Regulation,ASR)两大系统组合系统的进一步发展,可以快速、主动地对汽车各个车轮进行制动。
先导式高速开关阀的优化设计与动态仿真

21 0 1年 7月
机 Βιβλιοθήκη 电 工 程
Vo. 8 No 7 12 .
J1 0 l u .2 1
Ju n l fMe h nc l E et c lE gn eig o ra c a ia & lcr a n ie r o i n
先 导 式 高 速 开 关 阀 的优 化 设 计 与动 态 仿 真 术
中 图 分 类 号 :H 3 . 2 T 1 2 T 17 5 ;H 2 文献标志码 : A 文 章编 号 :0 1— 5 1 2 1 )7— 79— 4 10 4 5 (0 10 0 8 0
Op i i a i n d sg n y a i i u a i n o tm z to e i n a d d n m c sm l to f p l t d h g p e n- f a v i e ih s e d o o v l e o
h hsedo—fvle i i i vl , n eojc v nt nw s u f w r pii n aa e s f h anvle sa i p e no v t asd ma av adt bet e u c o a to adt ot z gprm t em i a .A n g a w h le n e h i f i p r o m i e ot v
ea l , p c cpl e ref w o —fv le a o t i da cr ig o h b cig u ci .I o e v la o ep r r a c f x mp as e i i tdl g o n o v s pi z c od eo j t n t n n r r o a t n t e o n e e i f o a l a w m e n tt e n f o d te u i h fm o
开关磁阻电机调速系统研究及MATLAB仿真
开关磁阻电机调速系统研究及MATLAB仿真在开关磁阻电机调速系统中,主要包括开关磁阻电机、功率电子器件
和控制算法三个主要部分。
其中,开关磁阻电机由转子和定子组成,通过
改变定子和转子之间的磁阻能够实现转速的调节。
功率电子器件用于控制
电机的输入和输出电力,常用的有IGBT、MOSFET等。
控制算法主要用于
实现对电机的调速控制,常用的方法有PID控制、模糊控制等。
在进行MATLAB仿真时,需要建立相应的数学模型。
首先需要将电机
的转动方程和电磁方程建立起来,然后根据电机的特性进行参数设置和仿
真实验设计。
可以通过MATLAB的仿真工具箱来实现对开关磁阻电机调速
系统的仿真,该工具箱提供了丰富的函数和算法,能够方便地进行系统建
模和仿真。
在进行仿真实验时,可以通过改变不同的参数来观察系统的动态响应。
例如,调整PID控制器的参数以改变电机的调速性能,通过观察电机的转
速和转矩变化情况来评估调速系统的性能。
同时,还可以分析电机控制系
统的稳定性、鲁棒性等,并对系统进行优化。
总之,开关磁阻电机调速系统的研究和MATLAB仿真是提高电机性能
和控制精度的重要手段。
通过建立数学模型和进行仿真实验,可以对系统
进行分析和优化,为实际应用提供参考和指导。
同时,也为开关磁阻电机
的进一步研究和应用奠定了基础。
PWM高速开关阀驱动电路仿真设计
变 ,高 速 开 关 阀磁 环 路 总 磁 阻R 亦 保 持 不 变 。 由
磁 路欧 姆 定律 :
R  ̄= Ni
m
量 ,F为 电磁 吸 力 ,F 力 阀芯 轴 向液 动 力 ,伪 库 c d
() 1Βιβλιοθήκη 伦 摩擦 力 。 由于 方 程 () () 非线 性 的 ,无解 析 解 。 为 6、 7是
中图分类号 :T 1 75 +1 H 1 2 3 文献标识码 :A 文章编号 :1 0 — 14 21 ) 6 o 8 0 9 0 ( 0 o o - l - 4 0 3 6
Doi 3 6 / . s . 0 -0 4. 0 . 6.5 :1 9 9 J i n 1 9 1 0. s 0 3 21 0 5 0
( 东交通大学 信息工程学院 ,南昌 3 0 1 ) 华 3 0 3
摘 要 :本文分析了高速开关阀的开关过程中不同阶段线 圈电流对其开关时间的影响。在 仿真分析 的基 础上 ,设计 了低端 MO F T S E 管控制的高 、低 电压驱动 电路 ,建立 了驱动 电路 的P PCE S I 模型 。 仿真结果表明 ,该电路可减小 高速开关阀的开关时间 ,提 高其 响应频率 。 关键词 :高速开关阀 ;P WM;MO F T;P PC SE S IE;仿真
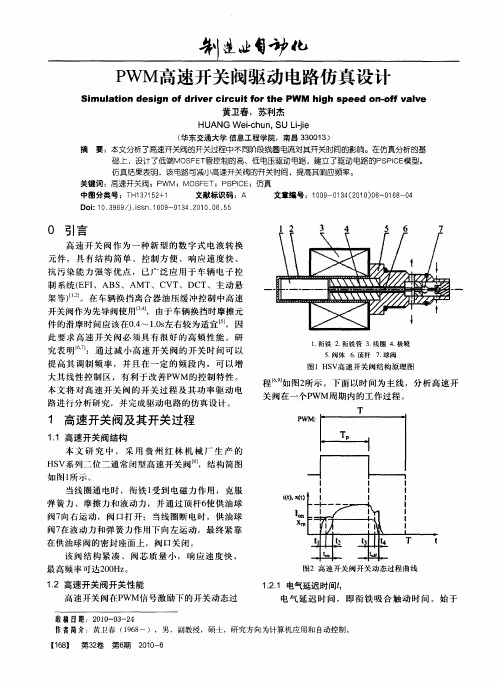
1 衔 铁 2 衔 铁 管 3 线 圈 4 极 靴 . . . . 5 阀 体 6 顶 杆 7 球 阀 . . .
提 高 其 调 制 频 率 ,并 且 在 一 定 的 频段 内 ,可 以增
大 其 线性 控 制 区 ,有利 于 改善P M的控 制 特性 。 W 本 文 将 对 高 速 开关 阀 的开 关 过程 及 其 功 率 驱动 电
0 引言
高 速 开关 阀作 为 一 种 新 型 的数 字式 电液 转 换 元 件 ,具 有结 构 简 单 、控 制 方 便 、响应 速 度 快 、 抗 污 染能 力 强 等 优 点 , 已广 泛 应 用 于车 辆 电子 控
高速开关阀控绞车系统的建模与仿真
作 者 简 介 : 浩 (9 4 , , 南 隆 回人 , 究 生 , 事 液 压 传 动 与 控 制 庞 17 一)男 湖 研 从
方 面研 究 。
表 3 螺 母 旋 紧 力 矩 表
螺母 直径 / n
Ml ~ M 6 O l M O ^ 2 2 ~ 杞
法兰 , 当介 质 温度 上升 到 2 0 2 0 时应 将 螺 栓进 行 热 5 ~ 8 紧 。 了防 止检修 时 拆不 下螺 栓 , 为 当介 质温 度 降到 2 0 0— 2 0C . 螺 栓螺母 连 接处 先用 螺 栓松 动剂 松动螺 栓 5 ̄时 在 然后将 螺母 预 回旋松 3 。6 。 0~0 。
中 图分 类 号 : H1 7 T 3 文献标识码 : A 文 章 编 号 :0 8 0 1 ( 0 8 0 — 0 7 0 10 — 8 3 2 0 ) 4 0 0 — 5
Sm u ai n S u y n i lto t a o Hy r u i W i h d a lc nc Co tol d y n r le b H i h pe d o N/ F Vav s g —s e o F l e
摘 要 : 文 对应 用 于 长螺 旋 钻 机 的 高速 开关 阀控 液 压 绞 车 系统 进 行 了特 性 分 析 和传 递 函数 推 导 , 对 系 统 进 行 了 建 模 和 仿 真 。对 影 本 并
响 系统 特 性 的 几 个 主 要 参 数 进 行 了合 理 选 取 。 为 长 螺 旋 钻 机 的 自动 控 制 系 统 设 计 提 供 了 理 论 依 据 。 关键 词 : 长螺 旋 钻 机 ; 压 绞 车 ; 真 液 仿
能, 绞车 制 动器 压力 腔卸 荷后 制 动 绞 车滚 筒 , 止 绞车 停
控制系统建模与仿真基于MATLABSimulink的分析与实现

读书笔记
01 思维导图
03 精彩摘录 05 目录分析
目录
02 内容摘要 04 阅读感受 06 作者简介
思维导图
本书关键字分析思维导图
实现
通过
仿真
技术
进行
分析
方法
分析
matlabsi mulink
仿真
系统
simulink
实现
介绍
工程
精彩摘录
精彩摘录
《控制系统建模与仿真基于MATLABSimulink的分析与实现》精彩摘录 随着科技的发展和社会的进步,控制系统在各个领域中的应用越来越广泛, 掌握控制系统的建模与仿真技术对于科学研究、工程实践等方面都具有重要意义。 而《控制系统建模与仿真基于MATLABSimulink的分析与实现》这本书,正是为满 足这一需求而编写的。
阅读感受
而真正让我感到震撼的是第4章到第8章的内容。作者利用MATLAB强大数据处 理、绘图函数和Simulink仿真工具,对被控对象模型进行了系统建模、分析、计 算、性能指标的优化及控制器设计。从时域、频域、根轨迹、非线性及状态空间 几个方面,完成了对系统性能指标的验证及控制系统设计。这其中的细节和深度, 都足以显示作者对这一领域的深入理解和实践经验。
目录分析
在“仿真技术”部分,目录涵盖了控制系统仿真的基本原理、仿真模型的建 立、参数设置以及仿真结果的分析等内容。还介绍了如何利用MATLABSimulink进 行仿真,使得读者能够快速上手这一强大的仿真工具。
目录分析
“应用实例”部分通过多个具体的案例,展示了如何将建模与仿真技术应用 于实际控制系统。这些案例既有简单的单输入单输出系统,也有复杂的非线性多 输入多输出系统,具有很高的实用价值。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第25卷第3期湖南科技大学学报(自然科学版)2010年9月J ournal of H un an U ni ver si t y of Sci ence&T echnol ogy(N at ur al Sci ence E di t i on)V01.25N o.3 Sept.2010基于高速开关阀的转速控制系统建模与仿真张庆永1,常思勤2(1.湖北汽车工业学院汽车工程系,湖北十堰442002;2.南京理工大学机械工程学院,江苏南京210094)摘要:高速开关闽是电液控制系统的新型元件。
与计算机接口方便,并有较强抗污能力.设计了一个基于高速开关阀的二次调节转速控制系统,建立了主-J t-元件的数学模型,并得到转速控制系统的状态方程通过采用脉冲宽度调制(PW M)技术,实现对该系统的转速控制.通过仿真。
研究了占空比和阻尼系数对系统响应的影响.并通过试验对仿真结果进行了验证.研究表明:通过改变高速开关阀的PW M信号占空比,可以实现对二次元件的转速控制,且能满足系统的性能要求.关键词:高速开关阀;PW M;转速控制中图分类号:U463.22文献标识码:A文章编号:1672—9102(2010)03—0024—05二次调节是液压传动领域近年来发展起来的一种新型静液驱动技术.其特点是系统的压力基本恒定,通过调节液压泵,马达(称为二次元件)排量的变化来适应负载转矩的变化【Ⅷ.二次元件排量的变化通过阀控制液压油缸改变二次元件斜盘倾角来实现㈣.而高速开关阀作为新型的数字式电液转换控制元件,采用脉冲流量控制方式,直接根据脉冲电信号进行开关动作,与计算机有直接相连的接口,可以很方便的控制二次元件的排量变化,从而改变二次元件输出的转速、转矩、功率等17-91.作者提出的转速控制系统,是利用高速开关阀调制信号的占空比一流量特性来实现对二次元件变量油缸的位置控制,改变二次元件的排量,从而达到调节转速的目的.由于排量的调节是通过控制缸来实现,所以二次元件转速控制实际上也是位置控制环节.本文建立了系统的数学模型,并进行了仿真研究和试验分析,充分论证说明了系统的可行性.1系统建模1.1系统的组成及工作原理图1为基于高速开关阀的转速控制系统.图中液压缸活塞杆的位移可以改变斜盘f顷角,从而改变二次元件的转速.二次元件的转速及执行器活塞杆的位移通过传感器和M D转换反馈到计算机计算机将这些反馈值采样、比较后,得到控制信号,经放大器对脉冲信号幅值放大后,分别控制两个高速开关阀.高速开关阀采用PW M 方式工作,通过调节占空比控制高速开关阀的输出流量和压力,从而控制活塞杆的位移,最终控制二次元件的转速到目标值周中只为恒压网络压力,一路驱动二次元件,另一路通过减压阀控制两个高速开关阀.PW M高速开关阀转速控制机构的主要组成部分是高速开关阀、阀控液压缸动力机构和二次元件,下面分别建立其数学模型.1,2.高速开关阀;3.二次元件;4.减压阀图1转速控制系统ri g.1C ont r ol l i ng syst em of r ot a t i on sp eed收稿日期:2010--03-03基金项目:汽车动力传动与电子控制湖北省重点实验室(湖北汽车工业学院)开放基金(趵K201003);湖北汽车工业学院博士科研启动基金(BK201005)通信作者:张庆永(1980-),男,山东枣庄人,博士,讲师,主要从事混合动力车辆及机电液一体化技术研究.E—m ai Lz,hq r yl l27@163.eom1.2高速开关阀的特性分析高速开关阀是借助于控制电磁铁所产生的吸力,使得阀芯高速正、反向运动,从而实现液流在阀口处的交替通、断功能的电液控制元件.其采用脉冲流量控制方式,开关阀直接根据一系列脉冲电信号进行开关动作,再出口输出一系列的脉冲流.在—个脉冲周期内,导通时间为名,脉宽周期为T,占空比D=等.当高速开关阀工作‘』频率很高时,负载压力不会出现不稳定振荡情况阴q.高速开关阀工作油口的平均流量为厂f—q:D Cd4v、/生(只l-PL),(1)V P对其进行线性化,得qL寻np+凡。
尸0(2)式中,cd为高速开关阀的流量系数;A,为高速开关阀的阀口面积,m2;p。
为高速开关阀控制油口压力,Pa;PL 为高速开关阀的工作油口压力,Pa;nq为高速开关阀的零位流量增益;‰为高速开关阀的流量一压力系数.1.3液压缸的特性方程液压缸的力平衡方程为m r=挚似誓+k,y=A l pl.A妒2.(3)液压缸流量方程为帅矾誓嘶-p2)蚩针(4)g剃z誓刚p-p2)音誓J‘‘△f K l=yl概;’I鼯y。
投式中,,,l I为活塞和负载折算到活塞上的质量,kg;B为液压缸的总粘性阻尼系数,N s/m;k.为负载的弹簧刚度,N/m;pI,P2为液压缸无杆腔和有杆腔的压力,Pa;ql,q:分别为流人液压缸无杆腔和流出有杆腔的流量,m3/s;A。
,A:分别为液压缸无杆腔和有杆腔活塞受力面积,m2;y为液压缸活塞位移量,m;c嘶为液压缸的内泄漏系数,m7(N s);V.为无杆腔体积,m3;V:为有杆腔体积,I l l,;成为系统的有效容积系数,N/m2.1.4二次元件的特性方程二次元件的力矩平衡方程为业可譬+R#o+M b(5)式中,y。
为二次元件最大排量,m3/r ad;y.,为变量控制缸活塞最大位移,m;p。
为恒压网络压力,Pa;J为二次元件转动惯量和外界负载质量换算成二次元件输出轴处的转动惯量之和,kg m2;尺H为二次元件转动阻尼系数,N i n s/r ad;to为二次元件输出转速,rad/s;M L 为外界负载转矩,N rfl.1.5系统的动态建模转速信号经传感器测得并经A/D转换输入计算机,经与期望转速比较得到误差信号,经控制器计算后将相应的控制信号放大由计算机输出脉宽调制(P w M)信号,高速开关阀能够直接以数字的方式进行控制,不必经D/A转换,计算机可以根据控制要求发出脉宽调制信号,带动高速开关阀开或关,以控制液压缸液流的大小和流向.脉宽占空比越大,通过高速开关阀进入油缸的平均流量越大,油缸的运动速度越快阁.当二次元件的转速超过期望预定转速时,通过计算机根据PW M方式将相应的控制信号分别送到两个高速开关阀.高速开关阀采用差动P W M控制方式,其中高速开关阀l的占空比大于阀2,从而无杆腔的流量大于有杆腔的输入流量,液压缸向右移动,使得二次元件的排量增大,此时高速开关阀1和2工作在线性控制区(避开高速开关阀的死区和饱和区).此时系统的特性方程为qu=r t qi D l+n,s/'uqt z=nq2D2+naP,,矾=誓侣d出y+k,y=A P,-A。
P2gvl4-誓以(Pl—P2)+K1挚g洲:誓也(Pl-P2)一K2警旦商望L可蔓生+R剃+帆yH。
dt。
1……1“qu=q vlgI卢gv2Pu_p1.(6)式中,qLl t q止分别为高速开关阀1和2工作油口的流量,m3,s;pu,Pu分别为高速开关阀1和2工作油口的压力,Pa;nq。
,%分别为高速开关阀1和2的零位体积流量增益;‰。
,n正分别为高速开关阀1和2的体积流量一压力系数.X t=m,X2=y,X3巧,X4甲l,也--p2,令:拈【D l D2肠J r ,A=X2【ⅨI五2五3爿4爿5J1,一阜匕峰00 j¥m10O100一巫一旦且nh,m rn t o o一鲁譬o o舍鲁00一、f】O00O0O旦K止l000一昔0仁【l10001.可得系统的状态方程为胤Y=CX挪u1.(7)J2系统仿真基于上述数学模型,应用专业软件,对系统进行数字仿真分析,研究系统的速度响应特性.高速开关阀最大过流面积为0.0171cm2;二次元件最大排量为25m l/r,其机械效率和容积效率根据实际试验数值以数组的形式输入.根据工作过程中的排量、压力和转速用插值的方法来得到任一工作点的效率,转动惯量为0.7kg m2;排量控制缸的行程1=15m l n,总质量为0.157kg,活塞粘性阻尼系数2.6099N sdm.液压油的容积弹性模量为1.5×109,密度为900kg/m3,运动粘度为50.6m m%(V G46抗磨液压油).其它参数根据具体所选元件选取袋速仿真曲线如图2所示.o墨≮馏解时间,B图2转速一时间曲线Fi g.2R ot at i on s peed—。
ti m e C U I'V C从图2中仿真曲线可以看出,系统有较好的响应特性,符合系统的响应速度要求.惯性负载对其系统响应特性有影响,惯性负载增大时,系统的阻尼比加大,因而上升时间增大,同时系统输出有震荡的趋势.图3为系统在高速开关阀1输入不同的占空比(高速开关阀2的占空比为0)下液压缸内活塞的位移一时间曲线.从图中可以看出,P W M信号能够有效地控制活塞位移,当占空比不同时,活塞的响应速度不同.高速开关阀可以很好的控制活塞杆的移动速度,从而控制二次元件的排量.量稔迥时同/s图3不同占空比下的活塞位移一时问曲线Fi g.3D i spl acem ent—ti m e cur vc of pis t on under di ff e rent dut y c y c l e对活塞在不同粘性阻尼系数B时的活塞位移响应曲线进行了分析.图4中,曲线l为活塞位移控制曲线,曲线2和曲线3为小阻尼系数和大阻尼系数下的活塞位移响应曲线.从图中可以看出,阻尼系数增大,会增加排量控制缸活塞响应的稳定时间,从而影响转速控制的响应时间和控制精度.因此,在设计时,应采取措施减少活塞的粘性阻尼系数.量漳趔椭j i g时间/s图4不同阻尼系数下的活塞位移响应曲线’Fi g.4D i s pl acem ent l℃$ponse cur ve of p i s tnn underdi ff er ent ch m p i ng f,K't or 3试验结果与分析在试验室中建立如图5所示的实验装置.利用变量液压泵和蓄能器作为动力源,提供恒压油,作为二次元件的驱动压力,经减压后作为高速开关阀的控制压力.液压泵的最大排量25m L/r;蓄能器容积40L,充气压力l1M Pa,节流口流量系0.763.其他参与仿真模型所定参数相同.图5转速控制系统实验装置F i g.5T e st be n c h of s pe ed contr ol l i ng syst em从图6中试验曲线可以看出,在初始阶段,存在着一个响应时间滞后.经分析,这个滞后时间主要与下列因素有关:恒压系统压力P.;高速开关阀脉宽周期r;负载,包括惯性负载和阻力负载;油液的温度r和油液粘度77;二次元件本身固有的阻尼系数尺H.,^=萋蔷僻时同/s图6不同压力下的转速响应Fi g.6R o t at i o n sp eed r es pom e cur ve un der dif f erent pr ess ur e图6中曲线1为恒压源压力为22M PA时的转速响应,曲线2位恒压网络压力为18M PA时的转速响应,为此,提高系统工作压力,可以提高响应时间,同时也可以减少系统超调.作为输入之一的负载转矩,其对系统有一定影响,特别是初始负载,会使系统有向反方向转动的趋势.由于试验装置阻尼较小,所以系统的稳定时间较长.当系统压力较低时,转速波动较大,应使系统的工作压力位于蓄能器的稳定工作区.由于二次元件在零位时存在死区,即二次元件处于中位时,其起动阻力矩很大,且存在初始负载扭矩.为了加快动态响应过程,希望在起动过程中,二次元件尽快离开中位,处于最大排量状态,保持最大转矩下起动.基于以上考虑,在试验启动阶段,可以通过差动脉宽调制方式对两个高速开关阀进行控制,且t pt>t#,从而使二次元件较快的脱离零位.待转速超过期望转速时,再采用PI D控制规律.通过以上方法,加快了响应时间.图7给出了实验测试结果与仿真值的对比图形,可以看出,仿真模型和所选参数与试验基本符合.同时也说明仿真建立模型及参数较符合实际情况,所选用图7设定转速为900r/m i n分的转速响应曲线Fi g.7R o t at i o n sp eed r es pons e C U n l,C of t he f l ywheel a t pr e de f m ed sp eed of900r/m i n4结论1)通过改变高速开关阀的PW M信号占空比,可以改变液压缸两腔的压力差,活塞的移动速度也随之改变.改变二次元件的排量,从而实现对二次元件的转速控制,符合系统的性能要求.2)系统阻尼较小,因此它的稳定时间较长.特别是在负载较大的情况下,表现为一定的振荡.负载转矩对控制性能的影响一直都存在,但对转速控制过程的影响不是很大.3)利用现代控制理论分析方法,解决了二次调节转速控制系统的多输入问题.4)可进—步改进控制方法,从而改善系统的动态性能5)本系统除控制二次元件的输出转速外,还可以控制输出转矩、功率等情况,也能应用于二次调节静液传动系统中实现对系统惯性能的回收,从而可以用于液压驱动混合动力车辆等领域.参考文献:【l】韩文,常恩勤.二次调节静液车辆传动系统的智能PI D控制忉.农业机械学报,2004,35(5):9一11.H a r t W.C hang S Q.R esear ch on i nt eU i gent PI D cont rol of vehi cl ehyd m s t ati c t ra nsm i ss i o n w i th s eco ndar y r egul at i on m.T r ans act ions0f t he C hi nes e So c i et y ofA grl eul tur al M achi ner y,2004,35(5):9一11.【2】常思勤,易纲.一种新型电控液驱车辆的性能仿真与分析叽.南京理工大学学报。