新型压电高速开关阀仿真研究
双向复位高速开关电磁阀动态响应特性仿真研究
双向复位高速开关电磁阀动态响应特性仿真研究
史宇辰;王立勇;季文龙;贾然;陈涛;孙光新
【期刊名称】《机床与液压》
【年(卷),期】2024(52)1
【摘要】高速开关电磁阀作为典型的伺服液压系统执行元件,逐渐成为高精密液压系统的核心部件之一。
针对双复位弹簧式高速开关电磁阀的动态响应特性开展研究,建立高速开关电磁阀的多场耦合动力学模型,系统研究了高速开关电磁阀阀芯内径、弹簧刚度、线圈线径、工作温度、控制频率及占空比等对高速开关电磁阀阀芯所受到的电磁力和阀芯运动位移的影响,得到了高速开关电磁阀的优化设计参数,为进一
步研制响应速度快、性能稳定、流量及承压范围大、环境适应性强的高速开关电磁阀奠定了一定的理论基础。
【总页数】9页(P152-160)
【作者】史宇辰;王立勇;季文龙;贾然;陈涛;孙光新
【作者单位】北京信息科技大学机电工程学院;中国人民解放军32184部队;北京机械设备研究所总装调试室
【正文语种】中文
【中图分类】TH212;TH213.3
【相关文献】
1.高速电磁阀动态响应特性响应面预测模型的研究
2.电-液制动系统高速开关电磁阀的建模与动态特性仿真
3.高速电磁阀动态响应特性的仿真分析
4.高速开关电磁阀动态响应建模与仿真
5.双复位弹簧高速电磁阀动态特性研究
因版权原因,仅展示原文概要,查看原文内容请购买。
基于PWM控制的ESP高速开关阀动力学特性研究与仿真
基于PWM控制的ESP高速开关阀动力学特性研究与仿真王冬良;陈南;刘远伟【摘要】汽车ESP中采用的高速开关阀是二位二通电磁阀,通过电磁阀的开启或关闭来实现车轮轮缸的增压、保压和减压.在(10~100)Hz低频范围内,高速开关阀虽实现了平均开度控制,但阀还是会出现时开时闭的状态,且电磁阀在状态切换中存在压力响应滞后现象.为了提高液压系统的控制精度,提出了脉宽调制(Pulse Width Modulation,PWM)控制高速开关电磁阀的仿真模型,研究分析了调制频率在高频情况下,通过改变PWM下的占空比,实现高速开关阀压力精确控制的效果,达到ESP 制动压力响应快且平稳.【期刊名称】《机械设计与制造》【年(卷),期】2015(000)012【总页数】4页(P87-90)【关键词】PWM控制;ESP;高速开关电磁阀;仿真【作者】王冬良;陈南;刘远伟【作者单位】三江学院机械工程学院,江苏南京 210012;东南大学机械工程学院,江苏南京 211189;三江学院机械工程学院,江苏南京 210012【正文语种】中文【中图分类】TH16;U46摘.:汽车ESP中采用的高速开关阀是二位二通电磁阀,通过电磁阀的开启或关闭来实现车轮轮缸的增压、保压和减压。
在(10~100)Hz低频范围内,高速开关阀虽实现了平均开度控制,但阀还是会出现时开时闭的状态,且电磁阀在状态切换中存在压力响应滞后现象。
为了提高液压系统的控制精度,提出了脉宽调制(Pulse Width Modulation,PWM)控制高速开关电磁阀的仿真模型,研究分析了调制频率在高频情况下,通过改变PWM下的占空比,实现高速开关阀压力精确控制的效果,达到ESP制动压力响应快且平稳。
汽车电子稳定性程序(Electronic Stability Program,ESP)是改善汽车行驶稳定性的一种主动安全系统[1]。
ESP系统是制动防抱死系统(Anti-lock Braking System,ABS)和 ABS/驱动防滑控制系统(Acceleration Slip Regulation,ASR)两大系统组合系统的进一步发展,可以快速、主动地对汽车各个车轮进行制动。
高压开关板的虚拟仿真与实时监控技术研究
高压开关板的虚拟仿真与实时监控技术研究高压开关板是电力系统中非常重要的设备,用于控制和保护电力系统中的高压电路。
为了确保高压开关板的安全运行,虚拟仿真和实时监控技术成为关键,它可以帮助运维人员更好地理解和掌控开关板的运行状态,及时发现潜在问题并采取相应的措施。
虚拟仿真技术是通过建立高压开关板的数学模型和仿真算法,模拟真实的工作环境和工作条件,以评估开关板在各种情况下的性能和可靠性。
虚拟仿真技术具有以下优势:首先,它可以在不影响实际运行的情况下进行多种工况的测试和分析,提供更全面的性能评估。
其次,虚拟仿真技术可以模拟各种应力和负载情况,对开关板在不同条件下的数据输出进行模拟分析,为实时监控提供基础。
最后,虚拟仿真技术可以通过快速重建模型和仿真分析,提高开关板的设计效率和开发速度。
对于高压开关板的实时监控技术而言,主要包括数据采集、远程监控和故障诊断。
数据采集是实现实时监控的基础,通过传感器和数据采集装置获取开关板的各种数据,如温度、压力、湿度等。
这些数据可以被送到监控中心,并通过数据处理和分析来实现对开关板工作状态的监测和预警。
远程监控技术允许运维人员通过网络远程监视和操作高压开关板,无需亲临现场。
这种技术可以方便运维人员进行实时监控,并及时采取措施以防止故障的产生。
故障诊断技术是实现快速定位和修复故障的关键,通过数据分析和故障模式识别算法,可以帮助运维人员快速准确定位问题,并采取相应的解决方案。
随着虚拟仿真和实时监控技术的不断发展,高压开关板的性能和可靠性得到了显著提升。
利用虚拟仿真技术,可以对不同工况下的开关板进行全面的测试和分析,提前发现可能存在的问题并采取相应的改进措施。
通过实时监控技术,可以及时监测开关板的工作状态,并在出现异常情况时快速响应。
这样可以减少故障的发生,提高电力系统的稳定性和可靠性。
除了虚拟仿真和实时监控技术外,高压开关板的研究还应注重以下几个方面:首先,开发更加精确和准确的仿真模型和算法,以更好地模拟实际工作环境和工况。
高速开关阀的设计及数字仿真
高速开关阀的设计及数字仿真作者:胡学青曹吉花王洪艳来源:《数字技术与应用》2011年第07期摘要:高速开关阀是20世纪80年代发展起来的一种具有响应速度快、结构简单、抗污染能力强、与电子电路配合好等特点的电液控制转换元件。
只要控制脉冲频率或脉冲宽度,就能对流量进行连续的控制,高速开关阀是一种非常有前途的数字阀,发展这种数字元件将是工业现代化的必然选择。
为了进一步提高高速开关阀的响应频率,降低其响应时间,改善其性能。
首先从高速开关阀的理论出发,研究和分析其结构、工作原理和磁场分布等,根据其电磁特性和机械特性,建立数学模型,然后将数学模型线性化,转化为传递函数方框图;结合MATLAB /Simulink仿真工具,先把数学模型转化为仿真模型,代入参数后,进行数字仿真,生成动、静态仿真曲线图。
关键词:高速开关阀脉宽调制信号数学模型数字仿真中图分类号:TK428 文献标识码:A 文章编号:1007-9416(2011)07-0055-011、数学仿真数学仿真就是用数学语言去表达一个物体,并编制程序在计算机上对实际物体进行研究的过程。
这种数学表达就是数学模型。
数学仿真把研究对象的结构特征或者输入输出关系抽象为一种数学描述〔微分方程、状态方程等)来研究,具有很大的灵活性,它可以方便地改变物体结构、参数;而且速度快,可以在很短的时间内完成实际物体很长时间的动态演变过程;精确度高,可以根据需要改变仿真的精度;重复性好,可以很容易地再现仿真过程。
2、模型的建立我们利用simulink子系统技术来建立计算机仿真模型:首先构建高速开关阀整体模型,由单位阶跃信号作为输入信号,经过高速开关阀仿真模型模块,输出的信号由示波器显示。
然后根据高速开关阀的简化方框图编辑高速开关阀仿真模型模块。
2.1 仿真模块参数设置高速开关阀仿真模型建立之后,首先需要按照系统的要求设置仿真摸块的参数。
(1)增益Ku是放大器电压放大系数;取值为200;(2)L为衔铁与阀芯位移比例系数,取值为4.6;(3)Mm为衔铁的重量,取值为0.260Kg;(4)通过测试弹簧刚度为K s==3.Okgf/mm≈30N/mm;(5)N为线圈匝数,取值为1000匝;2.2 高速开关阀流量特性分析液体流经高速开关阀的流量公式为(4-2)式中:Cd—流里系数,取0.67-0.74;A—通流截面积;高速开关阀通常采用脉宽调制的方法来控制开关阀的开启时间及关闭时间。
高速开关阀瞬态流场仿真特性研究

高速开关阀瞬态流场仿真特性研究
龙万东;舒强;毛博;王先手;江琛裕;魏军
【期刊名称】《汽车零部件》
【年(卷),期】2024()1
【摘要】高速开关阀工作时,内部流体由于阀杆的运动形成了复杂的流动状态。
而在实际情况中,很难观察到阀体内部流道中阀芯运动时的流体瞬态变化。
基于此,采用计算流体力学动网格方法分析了高速开关阀3种工况下的状态,得到了流场的压力、速度、出口质量流率等数据。
结果表明:出口的质量流率随着阀口的开闭呈线性变化;流体压力、速度在阀座到出口的通道中间变化最大;出口区域与开关阀角落区域在大流速差下易形成漩涡现象,并且流体的漩涡现象会随着流体的速度差变化,而顶部的动铁周围压力、流速变化不大。
该结果可为设计高速开关阀时获取对应的最大通过流量及优化开关阀结构提供技术参考。
【总页数】6页(P1-6)
【作者】龙万东;舒强;毛博;王先手;江琛裕;魏军
【作者单位】重庆交通大学机电与车辆工程学院;上海同驭汽车科技有限公司;江铃汽车股份有限公司
【正文语种】中文
【中图分类】TP391.9
【相关文献】
1.新型旋转高速开关阀内部流场的动力分析与仿真优化
2.板式高速开关阀阀芯结构的优化与流场仿真
3.液压高速开关锥阀流场仿真特性研究
4.面向无人扫路机的高速开关阀瞬态液动力特性研究
因版权原因,仅展示原文概要,查看原文内容请购买。
压电式PWM开关阀结构设计及特性试验研究
中 图分 类 号 : TH1 8 3 文献标识码 : A
Th t u t r s g n a a t r s i s Ex e i e a t d f Pi z ee t i e S r c u e De i n a d Ch r c e itc p r m nt lS u y o e o lc r c
压 电叠堆 转 换 器 输 出位 移 较 小 , 直接 用 于驱 若 动 阀芯 , 阀所 能控 制 的流量 较 小 , 用 性 差 。因此 , 实
压 电式 P M 开 关 阀 结 构 设 计 及 特 性 试 验 研 究 W
许 有 熊 ,李 小 宁
( 京理工大学 机械工程学院 S 南 MC气 动技 术 中心 , 江苏 南 京 2 0 9 ) 10 4
摘
要 : 对 采 用 电磁 铁 为 电一 械 转 换 器 的传 统 高 速 脉 宽 调 制 ( W M ) 关 阀调 制 频 率 较 低 , 制 精 度 较 差 等 针 机 P 开 控
PW M - f l e 0பைடு நூலகம் o f Va v
X U u o g,LIXi o i g Yo xi n a nn
( c o fM e h nia gn eig,Na ln nv r iyo in e & Te h oo y,Na jn 1 09 S ho lo c a c l En ie rn nig U iest fSce c c n lg nig 2 0 4,Chi ) na Ab t a t sr c :The ta tona g s e d PW M n o f v v i n y he lc r — e h nia o e t r o lc r r dii lhih p e o - f ale drve b t ee to m c a c lc nv r e f ee to— m a ne s t s dv nt ge ow g tha he dia a a s of l pule i h m odu a i r q n y n p r ontol e ii s w dt l ton f e ue c a d oo c r pr cson. To ol t e s ve h p oblm s, a n e w o p ii hr e w a e oee t i r e ov lt — oston t e — y piz lc rc PW M gh s e d on of l i e e oee t i o e t hi — p e fvavedrv n by piz lc rcc nv r — e hih ha h d n a as e pon ei e e r he rw c st e a va t geoff tr s s sr s a c d. Is wo ki rncpl s i r duc d a t ve a ls r t r t r ng p i i e i nto e nd iso r l t uc u — a esg sc m p e e . O n t sb i , t e o lc rc PW M - fv l es o o yp sde e o d a d is r lva t ld i n i o ltd hi ass hepiz ee t i on of avet tpr t t e i v l pe n t ee n c r c e itc e t r on ha a t rs is t s s a e c duc e . T h e t ho td e t s s s w t att p o ot pe ha b t e s ic ng c r c e itc who e h he r t y s e t r w t hi ha a t rs is, s ope i i e i a ut nng tm s bo 0.57 s nd l i i e s bo 0 m s, a c n e c hi e pu s i h m a cosng tm i a ut 。3 nd a r a h gh r l e w dt m o dulton ai
一种新型压电驱动开关阀的理论设计
( 浙江大学 流体动力与机 电系统 国家 重点实验室 , 浙江 杭州
摘 要: 数字液压在节能、 可靠性 、 控制性能等方面较传统液压控制方法有 巨大优势, 高速开关阀作为数 字液压 中的 关键 部 件 , 其 研 究近年 来得 到 重视 。设 计 了一种 新 型压 电驱动 开关 阀 , 采 用基 于三 角放 大原理 的 滚 针 结构 , 对压 电材 料 的输 出位移 进行 放 大 , 用 于阀芯 驱 动 。 由于位 移放 大机 构会 导致 输 出力相 应 减 小, 传
Abs t r ac t:Di g i t a l h y d r a u l i c s h a s g r e a t a d v a n t a g e s c o mp a r e d wi t h t r a d i t i o na l h y d r a u l i c s i n s o me a s p e c t s l i k e e ne r g y —
t r a n s f e r r e d f o r c e i s ha r d t o o v e r c o me t h e s t e a d y - s t a t e f l o w f o r c e .S o a d e t a c h e d s p o o l s t r u c t u r e i s pr o p o s e d t o c o m- p e n s a t e t h e s t e a d y — s t a t e lo f w f o r c e.Th e r e s u l t s o f t h e t h e o r e t i c a l a n a l y s i s a n d CFD c a l c u l a t i o n s ho w t h a t t he pi e z o e - l e c t r i c a mp l i ic f a t i o n me c ha ni s m c a n s a t i s f y t h e d e ma n d o f s po o l d i s p l a c e me n t ,a n d t he d e t a c he d s p o o l s t r uc t u r e c a n r e d uc e t he s t e a d y — s t a t e lo f w f o r c e e f f e c t i v e l y . Th e r e s u l t s s ho w g o o d c o n s i s t e n c y wi t h d e s i r e d pr o p e r t i e s . Ke y wo r ds :d i g i t a l h y d r a u l i c s,hi g h s p e e d o / o n f v a l v e,pi e z o e l e c t ic r d iv r i n g,d i s p l a c e me n t a mp l i ic f a t i o n,s t e a d y - s t a t e lO f W or f c e
PWM高速开关阀驱动电路仿真设计
变 ,高 速 开 关 阀磁 环 路 总 磁 阻R 亦 保 持 不 变 。 由
磁 路欧 姆 定律 :
R  ̄= Ni
m
量 ,F为 电磁 吸 力 ,F 力 阀芯 轴 向液 动 力 ,伪 库 c d
() 1Βιβλιοθήκη 伦 摩擦 力 。 由于 方 程 () () 非线 性 的 ,无解 析 解 。 为 6、 7是
中图分类号 :T 1 75 +1 H 1 2 3 文献标识码 :A 文章编号 :1 0 — 14 21 ) 6 o 8 0 9 0 ( 0 o o - l - 4 0 3 6
Doi 3 6 / . s . 0 -0 4. 0 . 6.5 :1 9 9 J i n 1 9 1 0. s 0 3 21 0 5 0
( 东交通大学 信息工程学院 ,南昌 3 0 1 ) 华 3 0 3
摘 要 :本文分析了高速开关阀的开关过程中不同阶段线 圈电流对其开关时间的影响。在 仿真分析 的基 础上 ,设计 了低端 MO F T S E 管控制的高 、低 电压驱动 电路 ,建立 了驱动 电路 的P PCE S I 模型 。 仿真结果表明 ,该电路可减小 高速开关阀的开关时间 ,提 高其 响应频率 。 关键词 :高速开关阀 ;P WM;MO F T;P PC SE S IE;仿真
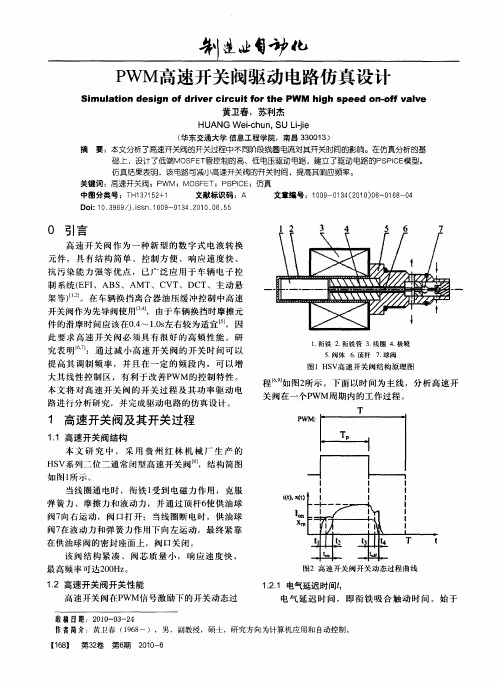
1 衔 铁 2 衔 铁 管 3 线 圈 4 极 靴 . . . . 5 阀 体 6 顶 杆 7 球 阀 . . .
提 高 其 调 制 频 率 ,并 且 在 一 定 的 频段 内 ,可 以增
大 其 线性 控 制 区 ,有利 于 改善P M的控 制 特性 。 W 本 文 将 对 高 速 开关 阀 的开 关 过程 及 其 功 率 驱动 电
0 引言
高 速 开关 阀作 为 一 种 新 型 的数 字式 电液 转 换 元 件 ,具 有结 构 简 单 、控 制 方 便 、响应 速 度 快 、 抗 污 染能 力 强 等 优 点 , 已广 泛 应 用 于车 辆 电子 控
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2008年 第53卷 第14期: 1737 ~ 1741 1737《中国科学》杂志社SCIENCE IN CHINA PRESS论 文新型压电高速开关阀仿真研究欧阳小平, 杨华勇, 蒋昊宜, 徐兵浙江大学流体传动及控制国家重点实验室, 杭州 310027 E-mail: ouyangxp@ 2008-02-22收稿, 2008-05-14接受国家重点基础研究发展计划(编号:2007CB714004)和浙江省钱江人才计划(编号: 2007R10024)资助项目摘要 利用压电晶体高频响、高输出力的特性, 提出一种新型压电开关阀结构, 解决了压电晶体输出位移小、温度效应的影响. 建立PZT 高速开关阀的数学模型并进行仿真分析; 仿真结果表明,PZT 执行器能够高频响地控制油液的切换, 并能同时输出高压大流量油液; PZT 阀的输出压力达到20 MPa 、流量达到10 L/min, 响应频率达到200 Hz.关键词 压电 高速 开关阀 仿真高速开关阀(又称数字阀)作为一种新型电液控制技术, 对传统的比例/伺服控制技术提出了挑战. 它可以实现高精度的液压伺服控制, 具有体积小、控制灵活、可靠性高、抗污染能力强和价格低廉等优点, 可以替代成本高、抗污染性差的液压伺服阀, 适合冶金、煤炭、工程机械等恶劣环境下使用[1].高速开关阀以提高响应频率来实现精确控制. 减小阀芯质量和液动力可以提高响应频率, 但是提高开关阀响应频率主要依靠增加驱动器作用力及缩小响应时间. 高速开关阀的驱动器主要是高磁力电磁铁, 由于高电磁力电磁铁安匝数较多、结构复杂, 受安装空间、运动惯性等因素影响, 进一步提高电磁阀的响应能力遇到了限制[1]. 此外, 由于开关阀受开关时间的限制, 阀芯行程不能太大, 因此其额定流量受到限制. 在相同驱动力下, 增加阀的额定流量, 将降低开关阀的响应速度. 同时随着高速阀工作压力的增加, 导致阀芯液动力增加, 也将降低开关阀的响应速度[1]. 因此, 高速开关阀存在高频响与高压、大流量之间的矛盾. 目前国内外研制的高速电磁开关阀很难同时达到响应频率为200 Hz 、工作压力20 MPa 、流量为10 L/min. 因此, 解决高速响应与高压、大流量之间的矛盾是提高数字阀性能的关键; 寻求新型驱动器, 提高直动型高速开关阀的响应能力是解决该问题的一个重要途径[2].液压技术的一个重要发展方向是将智能材料(smart material)(包括压电晶体、超磁致伸缩材料等)应用到液压元件与系统当中, 利用智能材料的高频响、高能量密度、体积小、结构紧凑等优点, 来提高液压产品的性能和竞争力[3]. 压电晶体(PZT)执行器是近年来快速发展起来的一种新型微位移驱动器件, 与超磁致伸缩材料和电磁驱动器相比较, 压电晶体具有响应快(频率可达GHz)、输出力大(可达kN)、功耗低(电流为mA 级)、价格低等优点. 因此利用压电晶体的特性, 研究新型高速开关阀—— 压电晶体高速开关阀, 将推动液压技术的革新[4,5].尽管压电晶体驱动器能够大幅度提高开关阀的响应速度, 但是由于输出位移只约占其长度的0.1%, 通常为几十微米, 而液压阀阀芯位移都在几百微米以上; 因此, 解决压电晶体驱动器位移放大的问题, 是利用好压电晶体材料的关键. 目前国际上主要采用杠杆位移放大、三角位移放大、液压放大、柔性铰链等方法来放大压电晶体的微位移[6]. 上述方法在放大压电晶体位移的同时, 也使其输出力缩小了相同的倍数; 此外, 由于放大机构内部的相互耦合作用, 降低了压电晶体驱动器的响应频率和控制精度, 目前国际上还没能有效地解决压电晶体的位移放大问题, 因此压电晶体数字阀的流量都很小.1 新型压电阀原理本文利用压电晶体高频响、高输出力特性提出一种新型数字阀结构, 见图1. 阀芯在打开或关闭瞬间,2008年7月 第53卷 第14期1738作用在阀芯上的运动阻力(包括液动力和液压力)最大; 随着阀芯位移的增加, 阀芯两端压力迅速建立, 阀芯运动阻力迅速降低, 见图2. 本数字阀采用3个压电晶体执行器来分别打开和关闭阀芯. 工作原理如下: ① 打开阀芯: 两个压电执行器1并列对称布置, 得电后输出3 kN 以上的瞬时力2F PZT1撞击阀芯,使阀芯加速运动, 直至阀芯全部打开; ② 关闭阀芯: 压电执行器2输出3 kN 以上的瞬时力撞击阀芯, 使阀芯加速运动, 并在高压p 1的作用下继续运行, 直到阀芯关闭. 该数字阀利用压电晶体瞬时产生的高输出力, 推动阀芯在高压下高速运行, 阀芯位移可达1mm. 由于利用的是压电晶体高输出力的冲击特性, 其输出位移对数字阀功能的实现不产生影响, 因此克服了压电晶体输出位移小的缺陷, 同时解决了数字阀图1 新型压电晶体数字阀结构图2 阀芯位移与运动阻力关系高频响、高压、大流量间的矛盾.2 数学模型[7]压电阀的下列数学模型可由图1得到. 2.1 打开过程忽略机械摩擦和油液摩擦, 当压电执行器1得电时, PZT 阀受力分析见图1, 其力学平衡方程为PZT11212,f S S r F F F F F F F mx−+−+−+= (1) 式中F 1为压力p 1产生的力, 22111π()4F d d p =−; F 2为压力p 2产生的力, 222π4F d p =; F f 为稳态液动力, ,2cos f v F q v ρα=, v 为油液速度; F Si 为弹簧力, Si F = 0(),Si i i K x x +∆ i =1,2; F r 为橡胶阻尼力,12,r r r F F F =−+111() (0),r h h F k h x rxx h =−+ ≤≤ 22()r F k h x rx =−+ (x ≤2),h F PZT1为压电晶体1产生的输出力为[8]1,max T11111,max 1,max PZT111,max (),0 ()L K U x x L U F x L ⎧⎛⎞∆−∆⎪⎜⎟⎜⎟=⎨⎝⎠⎪>∆⎩≤ K T1, ∆L 1,max , U 1, U 1,max 分别为压电晶体1的刚度、最大输出位移、实际工作电压和最大工作电压.进油口流量连续方程为2201,1,21ππ,44v v e V d d q q x x p β−+−= (2) 式中q v ,2为PZT 阀的流量, ,2v d q C = A为锥阀通流面积, πsin 1sin 22x A dx d αα⎛⎞=−⎜⎟⎝⎠出口油路的流量方程为1,2,32v v eV q q pβ−=, (3) 式中q v ,3为通过节流阀的流量, ,3v q K = p t 为油箱压力, p t =0.1 MPa; K L 为节流阀流量系数; 进油口流量,1,0,v v v r q qq =−; q v ,0为泵的输出流量; q v ,r 为溢流阀的流量;1,10 ( ),).c v r c p p q K p p ⎧⎪=⎨>⎪⎩≤p c 为溢流阀的设定压力.2.2 关闭过程1739同样忽略机械摩擦和油液摩擦, 当压电执行器1失电而压电执行器2得电时, 阀芯关闭, 其力学平衡方程为[9]PZT21212,f S S F F F F F F mx+−+−+=− (4) 式中F PZT2为压电晶体2产生的输出力,2,max T22222,max 2,max PZT222,max (),0 ().L K U x x L U F x L ⎧⎛⎞∆−∆⎪⎜⎟⎜⎟=⎨⎝⎠⎪>∆⎩≤ K T2, ∆L 2,max , U 2和U 2,max 分别为压电晶体2的刚度、最大输出位移、实际工作电压和最大工作电压. 阀芯关闭过程中的流量方程与前面的相同.3 温度补偿高速开关阀在工作过程中, 常导致油液的温度升高较快; 而压电执行器随温度的变化具有如下的性能, 如图3所示[10]. 可以看出, 外界环境温度的增加, 将使压电晶体的输出位移增加, 尽管增加的位移不是很大, 但是为了精确控制PZT 阀的流量, 这里还需考虑压电晶体的温度补偿问题[9]. 考虑到压电晶体的热膨胀系数, 这里选取一种金属作为PZT 执行器的温度补偿片,压电数字阀的总体结构见图4.图3 温度对压电晶体输出位移的影响1, 0℃; 2, 25℃; 3, 50℃; 4, 75℃4 仿真分析高速开关阀选自德国PI 公司的执行器, 性能参数见表1.压电晶体1和2分别被周期为2 ms 120V 的脉冲直流电压驱动,表2给出了仿真时的基本参数.图4 压电高速开关阀(a) 压电开关阀结构; (b) PI 压电执行器表1 PZT 执行器性能[10]PZT 执行器编号尺寸 A×B×L/mm 额定位移/ µm最大输出力/N 刚度/N ·µm −1共振频率/kHz 1 7×7×36 32 1850 50 40 2 10×10×3632 3800 100 40表2 仿真基本参数参数 数值 参数 数值 直径d /mm 3 压力p 1/MPa 20 压力βe /MPa 1440 刚度K s1/N ·mm −130 角度α /(°)55刚度K s2/N ·mm −164.1 角度α 对PZT 阀性能的影响图5显示了在PZT 阀其他参数不变的情况下, 改变锥阀半角α 得到的出口压力、流量曲线. 可以看出, PZT 开关阀能够在5 ms 内快速开关油液. 从图5(a)可以看出, 随着α 从45°增加到65°, 当PZT 阀打开时, 出口压力p 2的平稳区逐渐提高; 而当PZT 阀关闭时,α=55°时稳定区最大. 从图5(b)可以看出, 随着α从45°增加到65°, 当PZT 阀打开时, 出口流量q v ,2的峰值逐渐增加; 而当PZT 阀关闭时, α=55°时稳定区最大. 通过比较发现α = 55°较适合此阀. 4.2 直径d 对PZT 阀性能的影响在其他参数不变情况下, 改变锥阀通径d 的大小, 得到出口压力、流量曲线如图6所示. 通过比较可以看出, 当d 值增加到4 mm 时, PZT 开关阀已经不能很好地控制进口压力p 1=20 MPa, 这是因为阀芯被PZT 执行器1打开后, 在高压p 1的阻力作用下迅速关闭. 当d =3 mm 和3.5 mm 时, 其输出压力p 2和流量q v ,22008年7月 第53卷 第14期1740图5 角度α 对PZT 阀性能的影响(a) 压力p 2; (b) 流量q v ,2. 1, 45°; 2, 55°; 3, 65°图6 直径d 对PZT 阀性能的影响(a) 压力p 2; (b) 流量q v ,2. 1, d = 3 mm; 2, d = 3.5 mm; 3, d = 4 mm形式接近, 但是在d = 3.5 mm 下, p 2较接近p 1, q v ,2峰值较小; 因此d = 3.5 mm 较适合PZT 阀. 4.3 压力p 1对PZT 阀性能的影响在其他参数不变情况下, 改变进口压力p 1的值, 得到图7中的出口压力、流量曲线. 可以看出, 在不同的进口压力p 1下, PZT 阀能够打开和关闭油液; 压力p 2和流量q v ,2在打开和关闭时的稳定性随着进口压力p 1的增加而减小, 这是由于p 1的升高导致阀芯在运行过程中的阻力增加, 使阀芯运动速度减小, 到达图7 压力p 1对PZT 阀性能的影响(a) 压力p 2; (b) 流量q v ,2; (c) 位移x . 1, p 1 = 10 MPa, 2, p 1 = 15MPa, 3, p 1 = 20 MPa1741终点时间延长, 在阀芯运动周期T = 5 ms 不变的情况下, 阀芯停靠终点时间减少(如图7(c)所示), 从而导致p 2和q v ,2随p 1增加而稳定性减小. 从图7(b)还可以看出, 流量q v ,2随着压力p 1的升高而增加, 而稳定性随着压力p 1的升高而减小.4.4 PZT 阀在p 1 = 20 MPa 下的性能图8显示了压电阀在p 1 = 20 MPa 下的进出口压力对比情况. 可以看出: 进口压力p 1在阀芯未打开时, 保持20 MPa 恒定, 而p 2 = 0; 在阀芯打开过程中, 压力p 1有一较大的波动, 而压力p 2从0增加到最大值; 当阀芯完全打开时, p 1和p 2保持平稳, 并有一定的差值(由阀芯的节流作用引起); 当阀芯关闭时, p 1逐渐增加到20 MPa, 而p2从最大值降到0.图8 PZT 阀进/出口性能比较1, p 1; 2, p 2图9出示了PZT 阀进出口流量与阀芯位移的对比关系. 可以看出: 当x = 0时, q v ,1=q v ,2=0; 当x = 1.0 mm 时, q v ,1 = q v ,2 = 11 L/min; 当x 从0增加到最大值1 mm 的过程中, 流量q v ,1和q v ,2均有较大的波动峰值, q v ,1略大于q v ,2; 当x 从最大值1 mm 降到0的过程中, 流量q v ,1和q v ,2从11 L/min 降低为0, 且q v ,2略大于q v ,1. 同时还可以看出, 当阀芯位移进入和离开最大位移1 mm 时, 流量q v ,1和q v,2均有波动.图9 流量与阀芯位移的对比情况1, x ; 2, q v ,1; 3, q v ,25 结论利用压电晶体执行器高频响和高输出力的特性提出一种新型压电数字阀结构, 能够使压电阀阀芯输出较大的位移, 很好地解决了压电晶体输出位移过小的缺陷; 同时对压电晶体执行器进行了温度补偿.建立了压电高速开关阀的数学模型, 并进行仿真分析, 由仿真结果可知: 压电高速开关阀可以实现响应频率为200 Hz(高速)、工作压力达20 MPa(高压)、流量达11 L/min(大流量)的开启和关闭. 此外, 对压电阀的相关尺寸进行了优化设计.参考文献1张秀英, 王晓华. 数字阀的开发与应用. 液压与气动, 2001, (3): 32—332 Bauer F, Murrenhoff H. Piezo actuators-the future for high dynamically driven servo-valves. In: Fluid Power Transmission and Con-trol, ICFP 2005, 2005 April 5—8. Hangzhou: International Academic Publisher, 2005. 62—683 Lindler J E, Andersone H. Piezoelectric direct drive servovalve. In: Proceeding of SPIE 2002 on Industrial and Commercial Applica-tions of Smart Structures Technologies. San Diego: SPIE Press, 2002. 488—4964 Reichert M, Murrenhoff H. New concepts and design of high response hydraulic valves using Piezo-technology. Power transmission and motion control. Bath: University of Bath, 2006. 401—4145 Wong A P, Bullough W A, Chin S B, et al. Performance of the piezo-poppet valve, Part 1. In: Proceedings of the Institution of Me-chanical Engineers, Part I. J Syst Con Eng, 2006, 220: 439—4516 郑伟智, 辛洪兵, 赵罘. 压电驱动微位移放大机构的设计. 机械科学与技术, 2003, 22(6): 966—9677 Fitch E C, Hong I T. Hydraulic component design and selection. Book 1 of the Computerized Fluid Power Design Series. Stilwater: BarDyne Inc, 20018 Nasser K M. Development and analysis of the lumped parameter model of a piezohydraulic actuator. Master thesis. Blacksburg: Vir-ginia Polytechnic Institute and State University, 20009 Janocha H, Kuhnen K. Real-time compensation of hysteresis and creep in piezoelectric actuators. Sen Actu A, 2000, 79(1): 83—89 10Physik Instrumente GmbH & Co KG. High performance Piezo Actuators for OEM, Industry and Research, 2005 September。