对探潜声纳模拟仿真的技术实现
潜艇声呐的功能仿真

潜艇声呐的功能仿真
戴修亮;李汉清
【期刊名称】《指挥控制与仿真》
【年(卷),期】2004(026)003
【摘要】声呐是潜艇重要的探测设备.该文在分析声呐工作原理的基础上,结合主被动声呐方程求解了潜艇声呐的作用距离和有利工作深度,给出了潜艇声呐显示功能仿真原理和实现结果.
【总页数】4页(P73-75,80)
【作者】戴修亮;李汉清
【作者单位】海军潜艇学院,山东,青岛,266071;海军潜艇学院,山东,青岛,266071【正文语种】中文
【中图分类】U666.2
【相关文献】
1.基于反潜潜艇声呐探测的潜艇被发现概率算法研究 [J], 汤智胤;徐荣武;何琳
2.潜艇声呐系统的成套解决方案--潜艇与水下战场 [J], 颜俐;任桢
3.潜艇水动力噪声对声呐声基阵影响分析 [J], 刘明星; 许欣然; 夏铁坚
4.反潜直升机使用吊放声呐持续跟踪潜艇作战使用方法及其效能仿真 [J], 丛红日;郭晏宗;杨斌;粘松雷
5.潜艇避碰声呐发展分析 [J], 李宁;宋俊;杨秀庭;韩志斌;苏冰;高本征
因版权原因,仅展示原文概要,查看原文内容请购买。
直升机反潜模拟中的吊放声纳系统仿真

直升机反潜模拟中的吊放声纳系统仿真
韩瑞新;张宏军;祝笑舟;毛跃奇
【期刊名称】《计算机仿真》
【年(卷),期】2005(22)12
【摘要】吊放声纳系统仿真是直升机反潜作战模拟的关键.分析了吊放声纳发现判决方程、各种搜潜方法的共性特征,在此基础上将探测、发现目标的问题逐步转换成易于求解的数学模型.以单机和单潜作战对抗过程为典型实例,研究了仿真系统功能需求及总体结构.讨论了基于水声资料库、DirectSound技术、实时3D效果控制,实现音频信号的合成和回放的方法.针对一个合理的数据结构对于有效的数据处理的重要性,将空间矩阵法引入吊声数据处理仿真.运行和使用表明,仿真系统为直升机反潜综合战术模拟训练提供了实用的平台.
【总页数】4页(P28-31)
【作者】韩瑞新;张宏军;祝笑舟;毛跃奇
【作者单位】解放军理工大学工程兵工程学院,江苏,南京,210007;海军指挥学院,江苏,南京,210016;解放军理工大学工程兵工程学院,江苏,南京,210007;海军军训器材研究所,北京,102308;海军军训器材研究所,北京,102308
【正文语种】中文
【中图分类】TP391.9
【相关文献】
1.反潜直升机吊放声纳被动搜潜仿真与优化 [J], 李祥珂;赵志允;杜毅
2.反潜直升机吊放声纳缆位稳定控制需求分析 [J], 屈也频;尹大伟
3.反潜直升机吊放声纳搜索效率模型研究 [J], 王净;战凯
4.舰载反潜直升机吊放声纳区域反潜策略建模 [J], 常波;周晓光;田怀英;李莹
5.航空反潜中的吊放声纳系统仿真 [J], 韩瑞新;朱红胜;李春洪;张宏军;王嘉清因版权原因,仅展示原文概要,查看原文内容请购买。
航空声呐仿真系统设计
11
张晶晶 等:航空声呐仿真系统设计
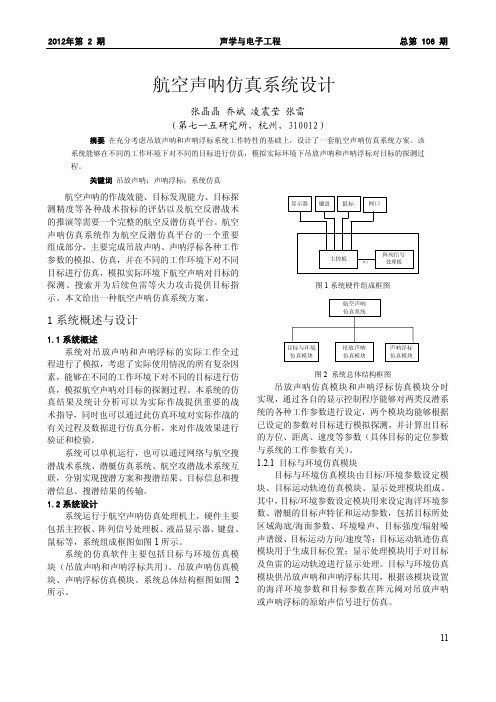
1.2.2 吊放声呐仿真模块 吊放声呐仿真模块主要包括参数设定/读取模
块、信号生成模块、信号处理模块、显示处理模块。 参数设定/读取模块用于完成吊放声呐各类性能参 数、工作参数的设定,如工作方式、工作频率、信 号类型、脉冲宽度、工作量程、发射功率等;信号 生成模块根据目标的运动参数,结合人工设定或从 数据库中读取的目标信息、海洋环境信息等模拟吊 放声呐入水开机后接收到的数字信号;信号处理模 块按照实际装备的信号处理方式对接收到的声信 号进行处理,对目标的方位、距离、径向速度等参 数实施探测,探测结果送显示处理模块。 1.2.3 声呐浮标仿真模块
声呐浮标仿真模块主要包括参数设定/读取模 块、信号生成模块、信号处理模块、显示处理模块。
参数设定/读取模块用于完成声呐浮标各类性 能参数、工作参数的设定,包括浮标类型(被动全 向、被动定向、主动全向)、处理方式(LOFAR、 DIFAR、RANGER)设定;信号生成模块根据目标 的运动参数,结合人工设定或从数据库中读取的目 标信息、海洋环境信息等模拟产生声呐浮标入水开 机后接收到的数字信号;信号处理模块按照实际装 备的信号处理方式对接收到的声信号进行处理,对 目标的方位、距离、径向速度等参数实施探测,探 测结果送显示处理模块。
2012年第 2 期
声学与电子工程
总第 106 期
航空声呐仿真系统设计
张晶晶 乔斌 凌震莹 张雷 (第七一五研究所,杭州,310012)
摘要 在充分考虑吊放声呐和声呐浮标系统工作特性的基础上,设计了一套航空声呐仿真系统方案。该 系统能够在不同的工作环境下对不同的目标进行仿真,模拟实际环境下吊放声呐和声呐浮标对目标的探测过 程。
目标信息存 储/输出
声呐测海底深度的原理

声呐测海底深度的原理声呐(Sonar)是一种利用声波在水中传播和回波特性测量海底深度的技术工具。
声呐系统通过发射声波信号并记录回波信号的时间延迟和强度,从而确定海底的深度和地形。
声呐测量海底深度的原理如下:1. 声波发射:声呐系统首先通过特定的发射器产生一系列高频声波信号。
这些声波信号经过放大和调整后,以方波或脉冲信号的形式被发射到水中。
2. 声波传播:一旦声波信号进入水中,它会沿直线或曲线路径传播。
声波在水中传播的速度大约是每秒1500米。
3. 声波反射:当声波信号遇到水下物体时,例如海底地形、岩石或潜艇,它们会引起声波的反射。
这些反射的声波信号也称为回波。
4. 回波接收:声呐系统中的接收器探测并接收到回波信号。
接收器将回波信号的强度和延迟时间转换成电信号。
5. 数据分析:接收到的回波信号由声呐系统中的计算机进行处理和分析。
通过比较发射声波信号与接收到的回波信号之间的时间差,计算出声波信号传播的时间,从而推算出水中物体与声呐的距离。
6. 海底测深:声呐系统中的计算机根据回波信号的强度和延迟时间,计算出声波信号从发射到接收所需的时间。
利用声波在水中传播的速度,可以将时间换算成海底的深度。
7. 数据显示:测量结果可以在声呐系统的控制面板上实时显示。
通过声呐系统的显示屏,操作人员可以实时监测和记录海底深度。
声呐测量海底深度的原理基于声波在水中的传播和回波特性。
通过发射声波信号和接收回波信号,声呐系统能够快速、准确地测量海底深度和地形。
这种测量方法在海洋勘探、海底地形测绘、航海导航、渔业资源调查等领域具有广泛的应用。
海洋声场建模与仿真技术研究
海洋声场建模与仿真技术研究一、引言海洋,占据着地球表面的约 71%,是一个充满神秘和未知的领域。
在海洋研究中,海洋声场建模与仿真技术作为一种重要的手段,为我们深入了解海洋的声学特性和物理过程提供了有力的支持。
海洋声场是指海洋中声波传播所形成的物理场,它受到海洋环境的多种因素影响,如海洋的深度、温度、盐度、海底地形、海洋生物等。
因此,准确地建模和仿真海洋声场对于海洋声学研究、海洋资源开发、海洋环境保护以及军事应用等领域都具有重要的意义。
二、海洋声场建模的基本原理海洋声场建模的核心是基于声波传播的物理规律。
声波在海洋中的传播可以用波动方程来描述,常见的有亥姆霍兹方程和抛物方程。
亥姆霍兹方程适用于描述小范围、高频的声波传播,而抛物方程则更适合处理大范围、低频的情况。
在建模过程中,需要考虑海洋介质的物理特性,如声速分布。
声速在海洋中并非均匀分布,而是受到温度、盐度和压力等因素的影响。
通常通过经验公式或者现场测量来获取声速的分布情况。
另外,海底地形也是影响海洋声场的重要因素。
海底的粗糙度、坡度和地质结构都会对声波的反射、折射和散射产生影响。
三、海洋声场仿真的方法(一)有限元法有限元法是一种将连续的求解域离散为有限个单元的数值方法。
通过对每个单元进行分析,然后将结果组合起来得到整个求解域的近似解。
在海洋声场仿真中,有限元法可以有效地处理复杂的边界条件和介质特性。
(二)边界元法边界元法是基于边界积分方程的数值方法,它只需要对边界进行离散化,从而减少了计算量。
对于具有规则边界的问题,边界元法具有较高的计算效率。
(三)射线理论法射线理论法将声波传播视为射线的传播,通过追踪射线的路径来计算声场。
这种方法在处理长距离传播和高频问题时具有一定的优势,但对于复杂的介质和边界条件适应性较差。
四、海洋声场建模与仿真中的关键技术(一)海洋环境数据的获取与处理准确的海洋环境数据是建模与仿真的基础。
这包括海洋的温度、盐度、深度、海底地形等数据的测量和收集。
声纳定位技术研究与应用

声纳定位技术研究与应用声纳定位技术是一种通过声波进行追踪和定位的方法。
借助声纳定位技术,可以实现对水下物体、潜艇和鱼群等的精确定位。
该技术的应用领域十分广泛,例如海洋资源勘探、海难救援、海产养殖等。
1. 声纳定位技术的原理和分类声纳定位技术的原理是利用振荡器(发射器)发出声波,声波沿海底或水体传播,并在目标物体表面产生回波。
同时,声纳接收器接收回波信号并通过计算回波时间差确定目标物体距离、深度、方向等参数。
声纳定位技术按照使用的频率和波长可分为低频声纳和高频声纳两种。
低频声纳通常使用频率为20千赫兹以下的声波,波长很长。
低频声纳可以穿透海底和水体,而且受大气和海底影响较小,因此适用于深海及水体较浑浊的情况。
高频声纳使用频率为200千赫兹以上的声波,波长较短。
它可以提供更精确和高分辨率的定位信息。
但是,受大气和海底影响较大,因此只适用于较浅的水域。
2. 声纳定位技术的应用(1)海洋资源勘探声纳定位技术在海洋资源勘探中起着重要作用。
它可以帮助人们寻找海洋石油、气体、矿物以及生物资源。
在深海油田开发中,声纳定位技术可以定位海底集油器和钻井平台,确保其建设的准确性。
同时,声纳定位技术还能用于确定海洋底部的形态和结构,为海洋地质研究提供数据。
(2)海难救援声纳定位技术在海难救援中也有广泛应用。
当船只遇到危险时,声纳定位技术可以帮助救援人员快速查找船只的位置。
并且,一些船只上也配备了声纳定位装置,以便在海面上追踪其他船只或搜寻被困害虫。
另外,一些自动化救援设备也采用声纳定位技术,以帮助人们快速行动。
(3)海产养殖声纳定位技术在海产养殖领域也有着重要的应用。
养殖场通常在深海或远离海岸的区域建造,因此声纳定位技术可以帮助养殖者找到合适的取样位置,同时还可以监测海产的交通情况、温度、光照和水质状况等,全面掌握海洋环境。
对海洋生物的研究和保护也离不开声纳定位技术,可以帮助人们深入研究海洋生态环境,为保护海洋资源提供数据支持。
声纳技术的原理及应用
声纳技术的原理及应用一、声纳技术的基本原理声纳技术是利用声波在介质中传播的原理来实现远程探测和通信的一种技术。
声纳技术主要利用声波在水中传播速度较快的特点,通过发射声波信号并接收回波来实现海洋探测、水下通信、水下导航等应用。
二、声纳技术的工作原理声纳技术主要包括发射、传播和接收三个过程。
2.1 发射发射是指通过将电能转化为声能,使其转变为可传播的声波信号。
通常采用的方式是通过压电陶瓷等材料的振动来实现声波的发射。
发射器产生的声波信号通常是由脉冲信号组成的,可以通过调整频率和幅度来实现不同的探测目标和距离。
2.2 传播传播是指声波信号在介质中传播的过程。
声波在水中的传播速度通常为1500米/秒左右,但会受到水温、盐度等因素的影响而发生变化。
在传播过程中,声波会受到介质的衰减、散射和折射等影响,这些影响会导致声波的强度衰减和方向改变。
2.3 接收接收是指将传播中的声波信号转换为电信号的过程。
通常采用的方式是利用接收器中的压电陶瓷等材料将声波转化为电压信号。
接收器中的电路会放大和处理接收到的信号,然后将其输出到显示设备或存储设备上,以便进行分析和应用。
三、声纳技术的应用3.1 海洋探测声纳技术在海洋探测中发挥着重要作用。
利用声纳技术可以探测海洋中的水下地形、海底构造和海洋生物等信息。
声纳系统可以通过发射声波信号并接收回波来获取水下目标的位置、形状和运动状态。
海洋勘探、海底资源开发和海洋环境监测等领域都需要广泛应用声纳技术。
3.2 水下通信声纳技术还可以实现水下通信。
传统的无线电通信在水下传播会受到很大的阻碍,而声纳技术可以通过水中的声波传播来实现远距离的通信。
水下声纳通信可以用于海洋科学研究、水下作业和潜艇通信等领域。
声纳通信可以实现点对点的通信,也可以实现多个节点之间的网络通信。
3.3 水下导航声纳技术还可以用于水下导航。
通过发射声波信号并记录回波的时间差和强度变化,可以实现对水下目标的定位和导航。
声呐技术的原理与应用
声呐技术的原理与应用1. 声呐技术的基本原理声呐技术是利用声波在介质中传播的原理来进行探测和测量的一种技术。
声波是一种机械波,其传播速度取决于介质的密度和弹性。
声波在水中传播的速度约为1500米/秒,而在空气中传播的速度约为340米/秒。
声呐系统主要由发射器和接收器两部分组成。
发射器通过震动装置产生声波信号,并将信号传播到介质中。
接收器则接收反射回来的信号,并将其转换为电信号进行处理和分析。
2. 声呐技术的应用领域2.1 水下探测与测量声呐技术在海洋勘探、水下测量和海洋生态监测等领域中具有广泛的应用。
通过声波的传播和反射,可以获取水下目标的位置、形状和性质等信息。
在海洋勘探中,声呐技术可以用于寻找沉船、海底矿藏和海底地形等。
在水下测量中,声呐技术可以用于测量海洋物理参数、海底地形和水深等。
在海洋生态监测中,声呐技术可以用于监测鱼群分布、海底生物和海岸线变化等。
2.2 水下通信与导航声呐技术在水下通信和水下导航领域也有着广泛的应用。
由于水中传播环境的复杂性,电磁波通信在水下的传输效果较差。
而声波具有较好的传播性能,因此可以利用声呐技术实现水下通信。
声呐技术还可以用于水下导航,在海洋中定位和导航船只、潜水器和水下机器人等。
2.3 鱼群探测与捕鱼声呐技术在渔业领域中应用广泛。
通过声波的传播,可以探测到水下鱼群的位置和数量等信息。
渔民可以根据这些信息来确定捕鱼的位置和方式,提高捕获效率。
此外,声呐技术还可以用于鱼群监测和资源评估,有助于科学管理渔业资源。
2.4 声纳反射成像声纳反射成像是声呐技术的一种应用形式。
通过发射声波信号,并接收反射回来的信号,可以获取目标物体的形状和位置等信息,从而实现对目标物体的成像。
声纳反射成像在水下探测、海底勘探和水下救援等领域中具有重要的应用价值。
3. 声呐技术的优点与挑战3.1 优点•声波的传播速度较快,传播距离较远,能够覆盖较大的范围。
•声波可以穿透水和一些固体物质,对于测量和探测来说具有较好的适应性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2 在建 立 水声 模 型 时我 们 主要 考 虑以
的 强 度 I与 基 准 强 度 I 比 值 的 常 用 对 数 乘 n 以 1 可 用下 面 的 公 式 表 示 出来 : 0,
I = 1 L 0× LOG( I/ I n
信 号 。 这 一 数 据 库 的 建 立 与 水 声 资 料 的 下 主 要 因 素
【 关键 词】 纳 模拟 仿真 声 【 中图分类号] TP3 1
[ 文献标识码】 A
【 文章编 号】0 7 41 ( 0 0 4 0 2 — 2 l 0 -9 6 2 1 )0 — 0 8 0
众 所 周 知 , 洋 环 境 千 变 万 化 , 拟 把 海 洋 混 响 与 海 洋 噪 声 统 称 为 噪 声 信 海 模 器 不 可 能 对 之 有 精 确 的 模 拟 , 只 能 有 而 选 择 地 以 典 型 的 海 洋 环 境 为 背 景 , 它 把 理想化 为完全符合水声原理 的海洋环境 。 水 声 条 件 改 变 后 , 利 用 水 声 原 理 的 相 再
P_ 压 力 , 公斤 ( 方 厘米 , 范 围在 l 平 其 公斤 ( 方厘 米<P 0 0公 斤 ( 方厘 米 。 平 <1 0 平
S——盐 度 , , 范 围 为 0 <S 3 ‰ 。 ‰ 其 ‰ < 7 c ——声 速 , /秒 。 米 实 际 工 作 中 , 为 海 水 温 度 是 不 均 匀 因 的 , 们 所关 心 的 只 是海 区 中的 声 速分 布 。 我 从 对 实 装 的 使 用 情 况 来 看 , 们 认 为 浅 海 我 海 区 的 声 速 分 布 是 均 匀 的 , 速 的 值 可 取 声 10 0米 /秒 。 5
示是声纳 员选定的方位范围 内的信号 , 这 种 信 号 即 包 括 噪 声 信 号 ( 景 信 号 ) 也 包 括 背 , 处 在 声 纳 有 效 作 用 距 离 内 的 目 标 反 射 信 号 的视频信号 。 从 已确定的 终端性 的模拟 思路出发 ,
可 以 用 下 面 的 数 学 模 型 作 为 仿 真 处 理 对 象 :
2 2 声 强 与声强级 .
单 位 时 间 内 , 过 一 个 与 指 定 方 向 垂 通 直 的 单 位 面 积 上 的 平 均 声 能 , 声 学 中 用 水
声强来描述这一概念 。
一
式 中 0( 为 仿真 对 象 , ( 为 噪 声对 W) E w)
象 , w ) 目标 对 声 信 号 的 反 射 。 把 处 理 N( 为 即 为 我 们 所 需 的 0( ) 号 。 w 信
而 不 是 实 时 产 生 的 。 我 们 采 用 了 建 立 数 好 后 的 E w) 号 与 N( 信 号叠 加到 一起 , ( 信 w) 据 库 的 方 法 来 模 拟 声纳 的 典 型 工 作 状 态 , 数 据 库 用 来 存 储 和 管 理 录 制 的 全 部 水 声
个 声 波 的 声 强 级 (L) 于 这个 声 波 I 等
大 的变化 。 从 视 频 系 统 来 看 , 示 器 上 的 视 频 显 显
1 ×( 一 3 ) 0 1 5× P 4 S 5 + .7
上 式 中 , 物 理 量 的 意 义 和 单位 如下 : 各
T __温 度 , , 范 围 在 一 4℃ <T<3 ℃ 其 0
℃ 。
洋 环境 。 对 声 纳 音 频 信 号 的 模 拟 , 们 采 用 了 我 以 声 卡 为 硬 件 基 础 , 用 Di e t 中 的 运 r cX Die t 0 n r c S u d技 术 实 现 对 声 音 的 模 拟 , 而 从 获得所需要的音频信号 。 对 声 纳 视 频 信 号 的 模 拟 方 法 , 们 运 我 用 Die t 中 的 Die t r w 技 术 实 现 对 实 r cX rcda 装系统中声纳余辉显示的模拟。
的反 射 。 声 纳 员 通 过 对 接 收 信 号 的 侦 听 , 可 以 确 定 声 纳 系 统 是 否 探 测 到 在 声 纳 的 有 效 作 用 距 离 内 有 目 标 存 在 。 有 目 标 存 在 时 与 没 有 目 标 存 在 时 , 频 信 号 的 频 音 率 成 份 显 然 不 同 , 波 的 声 源 级 也 有 很 回
多 少 密 切 相 关 。 水 声 资 料 越 丰 富 , 据 数 2 1 声速 .
库 就 越 全 面 , 拟 器 所 达 到 的 效 果 与 实 模
际越接近 。 从 音 频 系 统 来 说 , 动 声 纳 接 收 到 的 主
1 建 模思路
声 纳 模 拟 器 要 求 从 视 频 和 音 频 两 个 方 面 来 模 拟 声 纳 的 实 际 工 作 情 况 。 因 为 模 拟 器 中 没 有 信 号 发 生 器 , 有 信 号 处 没 理系统 , 拟 的原始信 号 只能是现 成的 , 模
O( =E( + w ) w) W) N(
关 知 识 对 之 进 行 处 理 , 到 改 变 后 的 海 得
乌 德 公 式 较 为 简 单 而 又 保 持 了 一 定 精 度 地
反 映 了 它 们 对 声 速 的 影 响
C = l 0 + 42 × T 一 0. 37 × T + 1. 45 1 0
号 ) 一 种 是 海 洋 中 各 种 目标 对 发 声纳模拟仿真的技术实现
邓 歌 明 郭新峰 (. 1 海军 飞行学 院 辽宁葫芦 岛 1 5 0 ; 海 军 9 81 2 0 1 2. 2 9部队 辽宁大 连 l 6 1 ) 1 6 0
[ 摘 要 】 纳 模 拟 器 的 难 点 主 要 集 中 在 对 水 声 处 理 的 模 拟 计 算 和 声 纳 音 频 、 视 频 信 号 的 模 拟 。 声