基于CAN总线和射频技术的无线数据传输系统设计
基于单片机的CAN总线通讯实现

基于单片机的CAN总线通讯实现CAN总线通讯是一种广泛应用于车辆电子系统、工业自动化和机器控制等领域的通讯协议,它具有高可靠性、实时性强和抗干扰能力强等优点。
在基于单片机的CAN总线通讯实现中,单片机作为CAN节点可以通过CAN总线与其他节点进行数据的发送和接收。
一、硬件搭建1.单片机选型在CAN总线通讯实现中,可以选择支持CAN总线的单片机芯片。
常见的单片机有STC12C5A60S2、AT89C51CC03等。
2.CAN总线收发器CAN总线收发器是实现单片机与CAN总线之间相互之间通信的关键组件。
常见的CAN收发器有TJA1050、SN65HVD230等。
3.连接线需要准备好与单片机芯片和CAN总线收发器相适应的连接线,如杜邦线等。
二、软件实现1.硬件初始化首先,在单片机中需要初始化相关的硬件资源,包括引脚设置、定时器设置等。
同时,也需要对CAN总线收发器进行初始化设置。
2.CAN总线配置在单片机中,需要配置CAN总线相关的寄存器,包括波特率设置、帧过滤设置等。
波特率的设置需要与其他CAN节点保持一致才可以正常通信。
3.数据发送单片机向CAN总线发送数据时,首先需要检查发送缓冲区是否为空。
如果不为空,则需要等待缓冲区可用,并将要发送的数据写入到发送缓冲区中。
随后,单片机向CAN总线发送一个请求发送的指令,然后等待发送完成的中断信号。
4.数据接收单片机接收CAN总线数据时,需要首先检查接收缓冲区是否为空。
如果接收缓冲区有数据,则单片机将读取缓冲区数据,并进行数据的处理。
5.中断处理CAN总线通讯中,可以通过中断的方式来处理数据的发送和接收。
单片机通过设置相关中断触发源和中断服务程序来实现数据的异步传输。
三、通讯协议CAN总线通讯中,可以使用标准CAN和扩展CAN两种协议。
标准CAN协议使用11位标识符,扩展CAN协议使用29位标识符。
在通讯过程中,需要设置相关的协议参数,包括标识符、数据长度码、帧类型等。
CAN总线设计(最终版)(1)
CAN-USB适配器设计*****指导老师:***学院名称:*****专业班级:****设计提交日期:**年**月摘要随着现场总线技术和计算机外设接口技术的发展,现场总线与计算机快速有效的连接又有了更多的方案。
USB作为一种新型的接口技术,以其简单易用、速度快等特点而备受青睐。
本文介绍了一种基于新型USB接口芯片CH372的CAN总线网络适配器系统的设计,提出了一种使用USB接口实现CAN总线网络与计算机连接的方案。
利用芯片CH372可在不了解任何USB协议或固件程序甚至驱动程序的情况下,轻松地将并口或串口产品升级到USB接口。
该系统在工业现场较之以往的系统,可以更加灵活,高速,高效地完成大量数据交换,并可应用于多种控制系统之中,具有很大的应用价值。
关键词:USB;CH372;CAN;SJA100;适配器目录1.设计思想 (3)2.CAN总线与USB的转换概述 (4)3. 适配器硬件接口设计 (5)3.1 USB接口电路 (5)3.2 CAN总线接口电路 (7)4.USB通用设备接口芯片CH372 (8)4.1 概述 (8)4.2 引脚功能说明 (9)4.3 内部结构 (9)4.4 命令 (10)5.软件设计 (10)5.1 概述 (10)5.2主监控程序设计 (12)5.3 CAN和USB接口芯片的初始化 (13)5.4 CAN报文的发送 (15)5.5 CAN报文的接收 (17)5.6.自检过程 (19)5.7 USB下传子程序设计 (20)5.8 USB上传子程序设计 (22)5.9.USB—CAN转换器计算机端软件设计 (23)6. 抗干扰措施 (25)7. 估算成本 (26)8. 应用实例介绍 (27)9 总结及设计心得 (28)10 参考文献 (28)1 设计思想现场总线网络技术的实现需要与计算机相结合。
目前,在微机上扩展CAN总线接口设备一般采用PCI总线或者RS-232总线。
PCI虽然仍是高速外设与计算机接口的主要渠道,但其主要缺点是占用有限的系统资源、扩展槽地址;中断资源有限;并且插拔不方便;价格较贵;而且设计复杂、需有高质量的驱动程序保证系统的稳定;且无法用于便携式计算机的扩展;RS-232虽然插拔方便,但是传输速率太慢。
can总线的传输原理

can总线的传输原理
CAN总线是一种高效、可靠的通信协议,广泛应用于汽车、工业控制等领域。
它的传输原理是基于一种双线串行通信方式,即CAN总线采用两根线进行数据传输,分别称为CAN_H和CAN_L线。
CAN总线的传输原理主要包括以下几个方面:
1.差分传输
CAN总线采用差分传输方式,即在CAN_H和CAN_L两根线上同时传送相反的电压信号。
这种方式可以有效地抵消外界干扰和噪声,提高数据传输的可靠性。
2.帧结构
CAN总线的数据传输是以帧为单位进行的。
每个帧由一个起始位、一个标识符、一个控制位、若干个数据位和一些附加信息组成。
其中标识符用于区分不同类型的消息,控制位则用于指示该帧是数据帧还是远程帧。
3.仲裁机制
当多个节点同时发送消息时,会产生冲突。
为了解决这个问题,CAN
总线采用了仲裁机制。
在数据帧中,标识符越低的节点具有更高的优
先级。
当多个节点同时发送消息时,会根据标识符进行比较,并自动
选择优先级最高的节点发送消息。
4.错误检测
CAN总线还具有强大的错误检测和纠正能力。
每个节点都会监测总线上的信号,并在发现错误时自动进行纠正。
如果一个节点发现了错误,它会向其他节点发送错误信息,并尝试重新发送数据。
总之,CAN总线是一种高效、可靠的通信协议,其传输原理包括差分传输、帧结构、仲裁机制和错误检测等方面。
这些特点使得CAN总线在汽车、工业控制等领域得到广泛应用。
基于CAN总线的船舶自动化系统研究与设计

基于CAN总线的船舶自动化系统研究与设计随着航运业的发展和船舶技术的不断进步,船舶自动化系统在船舶设计和运行中扮演着越来越重要的角色。
CAN总线作为一种灵活、可靠和高效的通信协议,被广泛应用于各种船舶自动化系统中。
本文将针对基于CAN总线的船舶自动化系统进行研究与设计,主要包括系统架构设计、通信协议选择、硬件设备选型、软件开发和系统测试等方面。
1.系统架构设计船舶自动化系统的架构设计是整个系统设计的基础,它直接影响着系统的性能、可靠性和可维护性。
在设计船舶自动化系统时,需要考虑到各个子系统之间的通信和数据交换,以及系统的可扩展性和可靠性。
一般来说,船舶自动化系统可以分为动力系统、导航控制系统、船舶监控系统和通信系统等子系统,它们可以通过CAN总线进行数据传输和控制。
2.通信协议选择在设计船舶自动化系统时,通信协议的选择是非常重要的。
CAN总线作为一种面向实时控制的通信协议,具有高带宽、低延迟和可靠性等特点,非常适合用于船舶自动化系统中。
此外,CAN总线还可以支持多主机和多节点的分布式控制系统,可以满足船舶自动化系统对数据传输和控制的要求。
3.硬件设备选型在设计船舶自动化系统时,需要选择适合的硬件设备来支持系统的正常运行。
一般来说,船舶自动化系统的硬件设备需要具有高性能、高可靠性和环境适应性。
针对CAN总线的船舶自动化系统,通常会选择一些支持CAN通信的控制器和节点,以及适合船舶环境的工业级传感器和执行器等设备。
4.软件开发船舶自动化系统的软件开发是系统设计的核心部分,它直接影响着系统的功能和性能。
在软件开发过程中,需要根据系统需求进行功能分解和模块化设计,采用面向对象的编程方法,以及将软件与硬件进行紧密结合。
此外,还需要考虑到系统的实时性和安全性,确保系统的稳定运行。
5.系统测试系统测试是船舶自动化系统设计的最后一步,通过各种测试手段对系统进行验证和验证。
在测试过程中,需要对系统的功能、性能和稳定性进行全面测试,包括单元测试、集成测试和系统测试等。
基于CAN总线的足球机器人通讯系统设计

8 8
长春理工 大学学报( 自然科 学版 )
SA10 J 0 0独立 C N控制 器 。SA10 A J 00受 F G PA
线收 发器 7 A V 144 ,把 SA10 4 L C 62 5 J 00的 5 T L V T
控制 ,其 内部寄存器的读写以及相的命令都需要按 照在 N o 系统规范操作 ,通过 C语言的开发环 i I sI 境 ,对其进行驱动初始化 ,接受并发送信息等具体 操作 。SA10 结构如 图 2 J 00 所示 … 。
锁相环的定制与设置 ,进行分频或倍频 以便对不 同 器件提供不同的时钟。( 其他接口 ( I 4 ) PO):A E L、 C 、R S D、WR、R T N S 、I I以及数据/ 地址复用总线 等的定制 ,完成与 SA10 J 00的硬件连接部分 。
通信 ,在应用 中更加灵活方便 。不仅如此 , 功耗在 比较 中同样有较大的优势 ,一般情况下磁藕合的功
的 C N 总线设计 方案 ,应用于足球机器人 内部 通讯 ,连接主机与监控设备、 电机、图像 采集装置 、避障传感器等 A
器件 ,解决 了传统 串行 通讯 方式 总线利用率与数据传输速率较低 ,无容错机制等问题 ,使机器人 的执行能力更加 快
速 、 准 确 、有 效 。
关键词 :C N 总线 ;足球机 器人 ;通讯 A
Z ANG R n , N hy n ,U Mi, HA a so H o g A Z io g S N n Z NG Qi u n
( co l f tEet nc n ier g C ag hnU iesyo S i c dT cn lg ,h n cu 3 0 2 S h o o Opo l r i gnei , hn cu nvri f c n e n eh oo y C a gh n1 02 ) co E n t e a
基于CAN总线的轨道检测系统数字传感器数据传输系统设计

基于CAN总线的轨道检测系统数字传感器数据传输系统设计李颖;王卫东;魏世斌【期刊名称】《中国铁道科学》【年(卷),期】2012(000)B08【摘要】为提高GJ-6型轨道几何参数检测系统的数据采集精度、抗干扰能力、以及远距离传输的实时性和可靠性,采用CAN总线技术设计开发基于CAN总线的数字传感器数据传输系统。
该系统采用QNX实时处理计算机作为上位PC机,通过CAN通信适配卡与CAN总线相连,上位PC机在轨检车运行时按照每隔0.25m-次的采样频率发送触发信号,通过CAN总线实时采集数字传感器输出的数据,对整个轨检系统的数据采样进行控制。
数字传感器通过CAN总线接收上位PC机的各种操作控制命令和设定的参数,并按照请求、应答、发送的顺序再通过CAN总线向上位PC机传输数据。
根据约定的通信协议制定各个传感器的29位数据帧格式和ID标识。
试验结果表明,该系统传输数据稳定,不易受到电磁干扰,且结构简单。
【总页数】5页(P122-126)【作者】李颖;王卫东;魏世斌【作者单位】中国铁道科学研究院基础设施检测研究所,北京100081【正文语种】中文【中图分类】U216.3【相关文献】1.基于CAN总线技术的测井数据传输系统设计 [J], 党瑞荣;潘海洋;宋楠;贾伟2.基于CAN总线的大客车无线束数据传输系统设计 [J], 肖凌云;高峰;王建;王睿3.基于CAN总线的轨道检测系统数字传感器数据传输系统设计 [J], 李颖;王卫东;魏世斌4.基于CAN总线的生物质机器视觉检测系统设计 [J], 孙进;杨晗;马煜中;丁煜;王宁5.基于数字传感器的断轨轨道衡数据采集系统设计 [J], 周美灵; 张保星因版权原因,仅展示原文概要,查看原文内容请购买。
手把手教你设计CAN总线系列讲座(2)
手把手教你设计CAN总线系列讲座(2)—CAN总线智能节点的设计在远程测控系统中,都要通过传感器或其他测量装置获取环境或相关的输入参数,传送到处理器,经过一定的算法,做出相应的控制决策,启动执行机构对系统进行控制,基于CAN总线的测控系统将单个测控设备变成网络节点,将控制系统中所需的基本控制、运行参数修改、报警、显示和监控等功能分散到各个远程节点中。
因此总线上的节点应该具有总线通信功能和测控功能,这必然离不开微处理器。
我们把具有这类功能的节点叫智能节点。
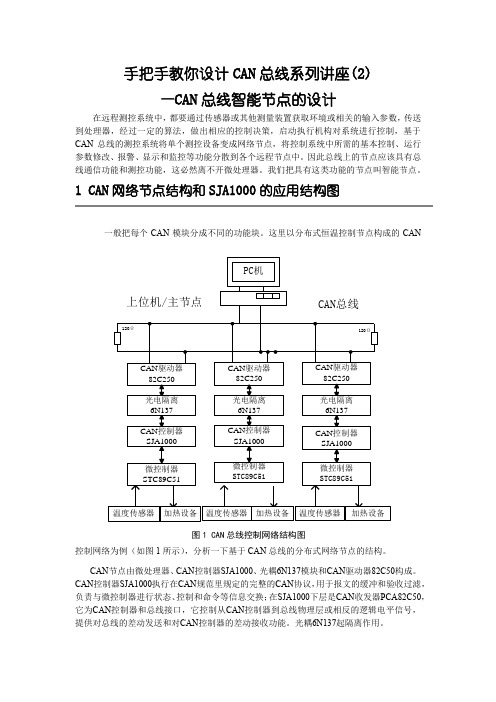
1 CAN网络节点结构和SJA1000的应用结构图一般把每个CAN模块分成不同的功能块。
这里以分布式恒温控制节点构成的CAN图1 CAN总线控制网络结构图控制网络为例(如图1所示),分析一下基于CAN总线的分布式网络节点的结构。
CAN节点由微处理器、CAN控制器SJA1000、光耦6N137模块和CAN驱动器82C50构成。
CAN控制器SJA1000执行在CAN规范里规定的完整的CAN协议,用于报文的缓冲和验收过滤,负责与微控制器进行状态、控制和命令等信息交换;在SJA1000下层是CAN收发器PCA82C50,它为CAN控制器和总线接口,它控制从CAN控制器到总线物理层或相反的逻辑电平信号,提供对总线的差动发送和对CAN控制器的差动接收功能。
光耦6N137起隔离作用。
图2 SJA1000的结构图所有这些CAN模块都由微处理器控制,它负责执行应用的功能,负责控制执行器(比如加热设备)、读传感器(比如温度)和处理人机接口。
如图2是SJA1000的应用结构图。
在CAN规范里,CAN核心模块控制CAN帧的发送和接收。
接口管理逻辑负责连接外部微处理器,该控制器可以是单片机、DSP或其他器件。
经过SJA1000复用的地址/数据总线访问寄存器和控制读写选通信号。
SJA1000的发送缓冲器能够存储一个完整的报文(扩展的或标准的)。
当微处理器初始化发送接口管理逻辑,CAN核心模块就会从发送缓冲器读CAN报文。
基于单片机的CAN总线通讯实现

基于单片机的CAN总线通讯实现CAN(Controller Area Network)总线是一种现代的串行通信总线,广泛应用于汽车电子系统和工控领域。
它具有高可靠性、抗干扰能力强、高速传输、多节点连接等特点,成为实时控制系统的首选通信方式。
实现基于单片机的CAN总线通讯,需要经过以下几个步骤:1.硬件准备:选择合适的CAN控制器和单片机,常用的CAN控制器有MCP2515、SJA1000等。
接下来需要连接CAN控制器和单片机,包括连接CAN高低线路、配置引脚等。
2.引脚配置:根据所使用的单片机和CAN控制器的规格,配置相应的引脚。
通常需要配置CAN_TX、CAN_RX引脚,同时还需要配置中断引脚。
3. 初始化CAN总线:初始化CAN总线的过程包括设置波特率、模式选择、滤波器设置等。
波特率是通信的重要参数,需要保证发送和接收端的波特率一致,通常使用比较常见的波特率如500kbps。
4.发送数据:CAN总线通信是基于消息的,发送数据需要构建CAN消息帧。
消息帧包括标识符、数据长度、数据内容等。
在发送数据之前,需要准备好发送的数据,并将数据放入CAN消息帧中,最后将消息帧发送到总线上。
5.接收数据:接收数据需要配置CAN总线的工作模式和接收过滤器。
当有数据从总线上接收时,CAN控制器将数据存入接收缓冲器,并产生中断或者置位标志位来提醒主控处理接收到的数据。
6.数据处理:接收到的数据可以根据需要进行处理,包括解析、判断、存储等。
根据数据的标识符和长度等信息,可以将数据分发给不同的处理程序进行处理。
7.错误处理:在CAN总线通信过程中,可能会出现数据错误、通信超时等问题。
需要设置相应的错误处理机制,包括错误标志位的监测、错误计数器的清零等。
8.电源管理:在使用CAN总线通信时,需要合理管理系统的功耗和电源。
对于低功耗应用,可以将CAN控制器和单片机配置为睡眠模式,待接收到唤醒信号后再恢复正常工作。
总结:基于单片机的CAN总线通讯实现需要进行硬件准备、引脚配置、初始化CAN总线、发送数据、接收数据、数据处理、错误处理和电源管理等一系列步骤。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
河南科技学院2011届本科毕业论文(设计)基于CAN总线和射频技术的无线数据传输系统设计学生姓名:丁智勇所在学院:信息工程所学专业:信息工程导师姓名:刘艳昌完成时间:2010-5-25基于CAN总线和射频技术的无线数据传输系统设计摘要变电站高压开关柜在电力系统中具有通、断电力线路,控制、保护系统等功能 ,但由于种种原因,大电流开关柜在运行中发热方面的故障率很高。
测量和监视高压开关柜内接头的温度,是避免重大事故发生及控制故障恶化的重要手段。
为方便、可靠、实时地对变电站高压开关柜内温度进行监测,研制了一种基于CAN 总线及射频技术的温度监测系统。
利用nRF2402及DS18B20作为无线温度传感器的主要器件实现开关柜内节点温度的采集、传输,以基于nRF2401射频芯片及独立CAN控制器芯片MCP2510的无线温度采集器完成对各温度传感器数据的接收及其与上位机的通讯,从而实现对高压开关柜内各节点温度的监测及报警。
此系统在某110 kV变电站实际运行证明:系统抗干扰能力强、温度监测准确、可靠,满足高压开关柜温度监测要求。
无线温度传感器功耗低、对开关柜内节点温度检测可靠、及时;温度采集器与上位机通讯实时性好、稳定。
通过对系统的改进,也可应用在化工、工矿等其他需要进行温度监控的场合。
关键词:温度监测,射频,CAN总线,高压开关柜,单片机AbstractSubstation in power system high-voltage switchgear with communication, broken power lines and control and protection system, and other functions, but for a variety of reasons, large current switchgear in operation of high fever. Failure Measurement and monitoring high-voltage switchgear joints in temperature, is to avoid serious accident happened and control fault the important means of deterioration. For convenient, reliable and real-time temperature within high-voltage switchgear for substation monitoring, developed a CAN bus and rf technology based on the temperature monitoring system. Use nRF2402 and DS18B20 as a wireless temperature sensor nodes in the main device implements switchgear temperature collection, transmission, based on the nRF2401 rf chip and independent CAN MCP2510 wireless temperature controller chip for each temperature sensor unit complete data receiving and and superordination machine, so as to achieve the communication within the high-voltage switchgear each node temperature monitoring and alarming. This system in a 110 kV substations actual proof: system strong anti-jamming capability, temperature monitoring accurate, reliable, meeting the high-voltage switchgear temperature monitoring requirements. Wireless temperature sensor low-power and temperature detection of switchgear nodes in reliability, on time; Temperature collector and superordination machine communication of good real-time performance, stability. Through the improvement of system, can also be used in chemical industry, mining and other needs of temperature monitoring occasion.Keywords:temperature monitoring,Rf,Thecan bus,High voltage switchgear,mIcro controller目录1 绪论 (1)1.1 研究背景和意义 (1)1.2 研究的内容 (1)2 系统的基本构成部分的原理 (2)2.1 RFID技术的基本构成及原理 (2)2.1.1 RFID的基本构成 (2)2.1.2 RFID的基本原理 (3)2.2 CAN总线技术 (4)3 硬件系统实现 (8)3.1 系统工作流程 (8)3.2 无线温度采集器 (10)3.3 无线温度传感器 (12)4 系统的软件实现 (14)4.1无线温度采集器软件实现 (14)4.2无线温度传感器软件设计 (16)结束语 (18)参考文献 (19)谢辞 (20)1 绪论1.1 研究背景和意义变电站高压开关柜在电力系统中具有通、断电力线路,控制、保护系统等功能,但由于种种原因,大电流开关柜在运行中发热方面的故障率很高。
测量和监视高压开关柜内接头的温度,是避免重大事故发生及控制故障恶化的重要手段。
大部分高压开关柜属封闭式结构,柜内高压电缆、刀闸触点、母排连接点等易发热位臵的温度若在打开盖板后监测,会破坏安全性能,危及值班人员安全。
采用无线技术对高压开关柜接头温度进行采集、传输,同时利用CAN总线把各接头温度信息传给PC机,可以很方便地进行实时和长时间监测,无需耗费人力。
文中介绍一种结合射频及CAN总线技术的高压开关柜温度监测系统,使开关柜接头过热事故得以防范。
1.2 研究的内容利用nRF2402及DS18B20作为无线温度传感器的主要器件实现开关柜内节点温度的采集、传输,以基于nRF2401射频芯片及独立CAN控制器芯片MCP2510的无线温度采集器完成对各温度传感器数据的接收及其与上位机的通讯,从而实现对高压开关柜内各节点温度的监测及报警。
其硬件由处理器MCU、存储器、CAN 总线控制电路、时钟器、声光报警器、地址编码器、射频基站及射频天线、键盘、看门狗、复位电路LED显示模块、语音模块等。
上位机监控软件采用Microsoft VC ++ 6.0实现,具有良好的界面和可操作性。
文中主要介绍无线温度采集器及传感器的软件实现。
此系统经理论分析证明:系统抗干扰能力强、温度监测准确、可靠,满足高压开关柜温度监测要求。
2 系统的基本构成部分的原理2.1 RFID技术的基本构成及原理2.1.1RFID的基本构成RFID的基本构成:RFID标签、读写器、天线、中间件。
RFID标签俗称电子标签,也称应答器(tag,transponder,responder),根据工作方式可分为主动式(有源)和被动式(无源)两大类,本文主要研究被动式RFID标签及系统。
被动式RFID标签由标签芯片和标签天线或线圈组成,利用电感耦合或电磁反向散射耦合原理实现与读写器之间的通讯。
RFID标签中存储一个唯一编码,通常为64bits、96bits甚至更高,其地址空间大大高于条码所能提供的空间,因此可以实现单品级的物品编码。
当RFID标签进入读写器的作用区域,就可以根据电感耦合原理(近场作用范围内)或电磁反向散射耦合原理(远场作用范围内)在标签天线两端产生感应电势差,并在标签芯片通路中形成微弱电流,如果这个电流强度超过一个阈值,就将激活RFID标签芯片电路工作,从而对标签芯片中的存储器进行读/写操作,微控制器还可以进一步加入诸如密码或防碰撞算法等复杂功能。
RFID标签芯片的内部结构主要包括射频前端、模拟前端、数字基带处理单元和EEPROM存储单元四部分。
读写器也称阅读器、询问器(reader, interrogator),是对RFID标签进行读/写操作的设备,主要包括射频模块和数字信号处理单元两部分。
读写器是RFID系统中最重要的基础设施,一方面,RFID标签返回的微弱电磁信号通过天线进入读写器的射频模块中转换为数字信号,再经过读写器的数字信号处理单元对其进行必要的加工整形,最后从中解调出返回的信息,完成对RFID标签的识别或读/写操作;另一方面,上层中间件及应用软件与读写器进行交互,实现操作指令的执行和数据汇总上传。
在上传数据时,读写器会对RFID标签原子事件进行去重过滤或简单的条件过滤,将其加工为读写器事件后再上传,以减少与中间件及应用软件之间数据交换的流量,因此在很多读写器中还集成了微处理器和嵌入式系统,实现一部分中间件的功能,如信号状态控制、奇偶位错误校验与修正等。
未来的读写器呈现出智能化、小型化和集成化趋势,还将具备更加强大的前端控制功能,例如直接与工业现场的其它设备进行交互甚至是作为控制器进行在线调度。
在物联网中,读写器将成为同时具有通讯、控制和计算(communication, control, computing)功能的C3核心设备。
天线(antenna)是RFID标签和读写器之间实现射频信号空间传播和建立无线通讯连接的设备。
RFID系统中包括两类天线,一类是RFID标签上的天线,由于它已经和RFID标签集成为一体,因此不再单独讨论,另一类是读写器天线,既可以内臵于读写器中,也可以通过同轴电缆与读写器的射频输出端口相连。
目前的天线产品多采用收发分离技术来实现发射和接收功能的集成。
天线在RFID 系统中的重要性往往被人们所忽视,在实际应用中,天线设计参数是影响RFID 系统识别范围的主要因素。