Multi-objective Evolutionary Optimization of Evasive Maneuvers Including Observability Performance
多目标粒子群算法的改进

多目标粒子群算法的改进多目标粒子群算法(Multi-Objective Particle Swarm Optimization, MOPSO)是对传统粒子群算法的改进和扩展,用于解决多目标优化问题。
在多目标优化问题中,存在多个冲突的目标函数,传统的单目标优化算法无法直接应用于解决这类问题。
因此,多目标粒子群算法应运而生。
多目标粒子群算法的改进主要体现在两个方面:多目标适应度函数的定义和多目标解的维护策略。
多目标适应度函数的定义是多目标粒子群算法的核心。
在传统的粒子群算法中,适应度函数一般为单个目标函数,通过最小化或最大化目标函数的值来寻找最优解。
而在多目标粒子群算法中,需要定义多个目标函数,并将其结合起来构成一个多目标适应度函数。
多目标适应度函数的定义需要考虑目标之间的冲突和权重分配问题,以便在搜索过程中对不同目标进行平衡和权衡。
多目标解的维护策略是多目标粒子群算法的另一个关键点。
传统的粒子群算法通过更新粒子的位置和速度来搜索解空间,但在多目标优化问题中,需要维护一组解集合,即粒子群的帕累托最优解集合。
多目标解的维护策略需要考虑解集合的多样性和收敛性,以便在搜索过程中保持一组较好的非劣解。
多目标粒子群算法的改进可以从多个方面展开。
一方面,可以改进目标函数的定义,采用更加合理和准确的目标函数来描述实际问题。
另一方面,可以改进粒子的更新策略,引入更加灵活和高效的更新算子,以提高搜索的效率和性能。
此外,还可以改进多目标解的维护策略,设计更加有效的解集合更新算法,以保证解集合的多样性和收敛性。
近年来,研究者们在多目标粒子群算法的改进方面做出了许多有益的尝试和探索。
例如,有研究者提出了基于领域知识的多目标粒子群算法,通过利用问题的领域知识来引导搜索过程,提高算法的搜索性能。
还有研究者提出了基于自适应权重的多目标粒子群算法,通过自适应调整目标函数的权重,实现对不同目标的平衡和权衡。
此外,还有研究者提出了基于机器学习的多目标粒子群算法,通过利用机器学习方法来提高算法的搜索性能和学习能力。
改进的粒子群优化算法

改进的粒子群优化算法背景介绍:一、改进策略之多目标优化传统粒子群优化算法主要应用于单目标优化问题,而在现实世界中,很多问题往往涉及到多个冲突的目标。
为了解决多目标优化问题,研究者们提出了多目标粒子群优化算法 (Multi-Objective Particle Swarm Optimization,简称MOPSO)。
MOPSO通过引入非劣解集合来存储多个个体的最优解,并利用粒子速度更新策略进行优化。
同时还可以利用进化算法中的支配关系和拥挤度等概念来评估和选择个体,从而实现多目标优化。
二、改进策略之自适应权重传统粒子群优化算法中,个体和全局最优解对于粒子速度更新的权重是固定的。
然而,在问题的不同阶段,个体和全局最优解的重要程度可能会发生变化。
为了提高算法的性能,研究者们提出了自适应权重粒子群优化算法 (Adaptive Weight Particle Swarm Optimization,简称AWPSO)。
AWPSO通过学习因子和自适应因子来调整个体和全局最优解的权重,以实现针对问题不同阶段的自适应调整。
通过自适应权重,能够更好地平衡全局和局部能力,提高算法收敛速度。
三、改进策略之混合算法为了提高算法的收敛速度和性能,研究者们提出了将粒子群优化算法与其他优化算法进行混合的方法。
常见的混合算法有粒子群优化算法与遗传算法、模拟退火算法等的组合。
混合算法的思想是通过不同算法的优势互补,形成一种新的优化策略。
例如,将粒子群优化算法的全局能力与遗传算法的局部能力结合,能够更好地解决高维复杂问题。
四、改进策略之应用领域改进的粒子群优化算法在各个领域都有广泛的应用。
例如,在工程领域中,可以应用于电力系统优化、网络规划、图像处理等问题的求解。
在经济领域中,可以应用于股票预测、组合优化等问题的求解。
在机器学习领域中,可以应用于特征选择、模型参数优化等问题的求解。
总结:改进的粒子群优化算法通过引入多目标优化、自适应权重、混合算法以及在各个领域的应用等策略,提高了传统粒子群优化算法的性能和收敛速度。
1多目标优化

多目标优化算法——11级计算一班 20113745 陆慧玲近年来,多目标优化问题求解已成为演化计算的一个重要研究方向,而基于Pareto 最优概念的多目标演化算法则是当前演化计算的研究热点。
多目标演化算法的研究目标是使算法种群快速收敛并均匀分布于问题的非劣最优域。
最优化问题是工程实践和科学研究中主要的问题形式之一,其中,仅有一个目标函数的最优化问题称为单目标优化问题,目标函数超过一个并且需要同时处理的最优化问题称为多目标优化问题(multiobjectiveoptimizationprob- lems,简称MOPs)。
对于多目标优化问题,一个解对于某个目标来说可能是较好的,而对于其他目标来讲可能是较差的,因此,存在一个折衷解的集合,称为Pareto 最优解集(Pareto optimal set)或非支配解集(nondominated set)。
起初,多目标优化问题往往通过加权等方式转化为单目标问题,然后用数学规划的方法来求解,每次只能得到一种权值情况下的最优解。
同时,由于多目标优化问题的目标函数和约束函数可能是非线性、不可微或不连续的,传统的数学规划方法往往效率较低,且它们对于权重值或目标给定的次序较敏感。
进化算法通过在代与代之间维持由潜在解组成的种群来实现全局搜索,这种从种群到种群的方法对于搜索多目标优化问题的Pareto 最优解集是很有用的。
第一代进化多目标优化算法以Goldberg 的建议为萌芽。
1989 年,Goldberg 建议用非支配排序和小生境技术来解决多目标优化问题。
非支配排序的过程为:对当前种群中的非支配个体分配等级1,并将其从竞争中移去;然后从当前种群中选出非支配个体,并对其分配等级2,该过程持续到种群中所有个体都分配到次序后结束。
小生境技术用来保持种群多样性,防止早熟。
Goldberg 虽然没有把他的思想具体实施到进化多目标优化中,但是其思想对以后的学者来说,具有启发意义。
多目标优化相关书籍

多目标优化相关书籍多目标优化(Multi-Objective Optimization)是指在优化问题中,同时考虑多个冲突的目标函数,并寻求一组最优解,这些解组成了所谓的“非支配解集”(Pareto-Optimal Set)或“非支配前沿”(Pareto-Optimal Frontier)。
多目标优化在实际问题中的应用非常广泛,例如工程设计、投资组合管理、交通规划等等。
以下是几本与多目标优化相关的书籍,包含了各种多目标优化方法和技术:1. 《多目标决策优化原理与方法》(Principles of Multi-Objective Decision Making and Optimization)- by Hai Wang这本书介绍了多目标决策优化的基本原理和方法,包括多目标决策的概述、非支配排序算法、进化算法等。
书中还通过案例研究和Matlab代码实现来说明方法的应用。
2. 《多目标优化的演化算法导论》(Introduction to Evolutionary Algorithms for Multi-Objective Optimization)- by Carlos A. Coello Coello, Gary B. Lamont, and David A. Van Veldhuizen这本书详细介绍了演化算法在多目标优化中的应用,包括遗传算法、粒子群优化等。
书中提供了大量的案例研究和实验结果,帮助读者理解演化算法的原理和使用。
3. 《多目标优化的进化算法理论与应用》(Evolutionary Algorithms for Multi-Objective Optimization: Methods and Applications)- by Kalyanmoy Deb这本书提供了一些最新的多目标优化的进化算法技术,包括NSGA-II算法、MOEA/D算法等。
书中还介绍了多目标问题建模和评价指标,以及一些应用案例。
多模态多目标优化算法

多模态多目标优化算法多模态多目标优化算法(Multi-modal Multi-objective Optimization Algorithm)是一种用于解决多目标优化问题的算法。
在许多实际问题中,我们往往需要优化多个目标函数,而这些目标函数往往是相互矛盾的。
多模态多目标优化算法可以在解空间中寻找到多个非劣解,这些非劣解同时优化了多个目标函数,为决策者提供了一系列可行的解决方案。
多模态多目标优化算法的核心思想是将问题转化为一个多目标优化问题,并在解空间中寻找到一组非劣解。
与传统的单目标优化算法不同,多模态多目标优化算法不仅考虑了目标函数的优化,还考虑了解的多样性和分布性。
通过引入多样性和分布性的指标,多模态多目标优化算法可以在解空间中寻找到多个非劣解,这些非劣解分布在整个解空间中的不同模态中。
多模态多目标优化算法的基本流程如下:首先,初始化一组解,并计算每个解的目标函数值。
然后,根据多样性和分布性的指标,选择一组最优的解作为种群。
接下来,通过交叉和变异等遗传算子,对种群中的解进行操作,生成新的解,并计算每个解的目标函数值。
然后,根据多样性和分布性的指标,选择一组最优的解作为新的种群。
重复上述步骤,直到满足终止条件,得到一组非劣解。
多模态多目标优化算法的优势在于可以同时考虑多个目标函数,并寻找到多个非劣解。
这样,决策者可以根据自己的需求,选择最合适的解决方案。
另外,多模态多目标优化算法还具有较好的收敛性和多样性,可以在解空间中寻找到全局最优解和局部最优解。
然而,多模态多目标优化算法也存在一些挑战和问题。
首先,多模态多目标优化算法需要选择合适的多样性和分布性指标,以评估解的多样性和分布性。
不同的指标对解的评估结果可能存在差异,需要根据具体问题选择合适的指标。
其次,多模态多目标优化算法的计算复杂度较高,需要耗费大量的计算资源和时间。
因此,在实际应用中,需要根据问题的规模和复杂度选择合适的优化算法。
多模态多目标优化算法是一种有效的解决多目标优化问题的算法。
多目标优化相关书籍
多目标优化相关书籍多目标优化是指在优化问题中存在多个独立的目标函数,同时寻找一组解使得这些目标函数都能获得最优或接近最优的值。
该问题在多个领域中都有广泛的应用,例如工程设计、经济决策、交通规划等。
下面是一些和多目标优化相关的书籍,这些书籍提供了从理论到实践的全面介绍和教程。
1. Multi-Objective Optimization Using Evolutionary Algorithms (2015) by Kalyanmoy Deb这本书由著名的优化专家Kalyanmoy Deb撰写,是多目标优化领域的经典之作。
书中详细介绍了多目标优化的基本概念、算法和应用,特别是演化算法在多目标优化中的应用。
它还提供了大量的实例和演示程序,帮助读者理解和应用多目标优化技术。
2. Multiobjective Optimization: Principles and Case Studies (2010) by Joshua Knowles, David Corne, and Martin M. Zeleny这本书是一本综合性的多目标优化教材,涵盖了多目标优化的基本原理、遗传算法、多目标优化的评价与比较等内容。
书中还包括多个案例研究,展示了多目标优化在不同领域的应用。
3. Multi-objective Optimization in Water Resources Systems: The Surrogate Worth Trade-off Method (1998) by Carlos A. Brebbia, D. A. Lansey, and J. C. Ulanicki这本书专注于水资源系统的多目标优化问题。
它介绍了水资源系统中常见的多目标优化问题,并提供了基于代理模型的权衡方法来解决这些问题。
书中还详细讨论了多目标优化的评价准则、算法选择和性能度量等方面的问题。
4. Multi-Objective Decision Analysis: Managing Trade-Offs and Uncertainty (1999) by Ralph L. Keeney and Howard Raiffa这本书介绍了一种系统分析、决策和实施的方法,可以帮助决策者在多目标优化问题中管理权衡和不确定性。
多目标进化算法性能评价指标综述

多目标进化算法性能评价指标综述多目标进化算法(Multi-Objective Evolutionary Algorithms,MOEAs)是一类用于解决多目标优化问题的算法。
在实际问题中,往往需要同时优化多个目标函数,这就需要使用多目标优化算法来寻找最优解集。
由于多目标优化问题的复杂性,需要对算法的性能进行全面评价。
本文将对多目标进化算法的性能评价指标进行综述,以期为相关领域的研究者提供参考和指导。
1. 收敛性多目标进化算法的收敛性是评价其性能的重要指标之一。
收敛性指标主要包括收敛速度和收敛准确度两个方面。
在理想情况下,算法应该能够在有限的迭代次数内找到接近于真实帕累托前沿的解集。
收敛速度指标可以通过衡量解集与真实帕累托前沿的距离来评价,收敛准确度则可以通过度量算法得到的解集是否足够接近帕累托前沿来评价。
2. 多样性多目标进化算法的多样性是指得到的解集中是否包含了足够多的种类和分布较广的解。
多样性指标主要包括均匀分布和分散度两个方面。
均匀分布指标可以通过衡量解集中解的分布是否均匀来评价,分散度指标则可以通过度量解集中解的分散程度来评价。
多样性的评价是为了确保算法能够获得全局的非劣解,而不是仅仅集中在某一区域。
3. 运行时间多目标进化算法的运行时间是指算法寻找最优解集所需的时间。
在实际问题中,算法的运行时间是一个十分重要的性能指标,因为用户往往希望算法在尽可能短的时间内给出满意的解集。
运行时间的评价需要综合考虑算法的收敛速度和解集的多样性来进行评价。
4. 鲁棒性多目标进化算法的鲁棒性是指算法对问题参数变化的适应能力。
在实际问题中,问题的参数往往会有所变化,因此算法的鲁棒性是十分重要的。
鲁棒性指标主要包括参数敏感性和问题变化适应性两个方面。
参数敏感性指标可以通过度量算法对参数变化的敏感程度来评价,问题变化适应性指标则可以通过度量算法对问题变化的适应能力来评价。
5. 可解释性多目标进化算法的可解释性是指算法得到的解集是否能够为用户提供有效的决策支持。
多目标多约束优化问题算法

多目标多约束优化问题算法多目标多约束优化问题是一类复杂的问题,需要使用特殊设计的算法来解决。
以下是一些常用于解决这类问题的算法:1. 多目标遗传算法(Multi-Objective Genetic Algorithm, MOGA):-原理:使用遗传算法的思想,通过进化的方式寻找最优解。
针对多目标问题,采用Pareto 前沿的概念来评价解的优劣。
-特点:能够同时优化多个目标函数,通过维护一组非支配解来表示可能的最优解。
2. 多目标粒子群优化算法(Multi-Objective Particle Swarm Optimization, MOPSO):-原理:基于群体智能的思想,通过模拟鸟群或鱼群的行为,粒子在解空间中搜索最优解。
-特点:能够在解空间中较好地探索多个目标函数的Pareto 前沿。
3. 多目标差分进化算法(Multi-Objective Differential Evolution, MODE):-原理:差分进化算法的变种,通过引入差分向量来生成新的解,并利用Pareto 前沿来指导搜索过程。
-特点:对于高维、非线性、非凸优化问题有较好的性能。
4. 多目标蚁群算法(Multi-Objective Ant Colony Optimization, MOACO):-原理:基于蚁群算法,模拟蚂蚁在搜索食物时的行为,通过信息素的传递来实现全局搜索和局部搜索。
-特点:在处理多目标问题时,采用Pareto 前沿来评估解的质量。
5. 多目标模拟退火算法(Multi-Objective Simulated Annealing, MOSA):-原理:模拟退火算法的变种,通过模拟金属退火的过程,在解空间中逐渐减小温度来搜索最优解。
-特点:能够在搜索过程中以一定的概率接受比当前解更差的解,避免陷入局部最优解。
这些算法在解决多目标多约束优化问题时具有一定的优势,但选择合适的算法还取决于具体问题的性质和约束条件。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
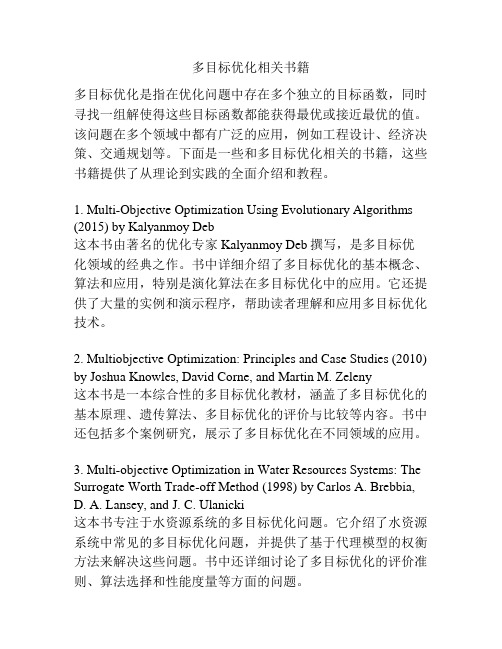
Multi-objective Evolutionary Optimization of Evasive Maneuvers Including Observability Performance*Yu Dateng, Luo Yazhong ,Jiang Zicheng, Tang GuojinCollege of Aerospace Science and EngineeringNational University of Defense TechnologyChangsha, Chinaluoyz@Abstract—This paper investigates optimal orbital evasion problem with considering observability performance by using a multi-objective optimization approach. The degree of observability is defined as a new performance index, which has a negative correlation with the accuracy degree of relative state estimation. A two-objective optimization model is then formulated and the NSGA-II algorithm is employed to obtain the Pareto-optimal solution set. The numerical results show that the proposed approach can effectively and efficiently demonstrate the relations among the evasive mission characteristic parameters. The proposed approach offers a novel view in solving orbital evasion problem.Keywords—Optimal Evasive maneuver; Evasion Problem; Observability; NSGA-II; Angles-OnlyI.I NTRODUCTIONMany published papers have studied the optimal evasion problem [1-6],which in fact is a path-planning problem. In the problem, a pursuer tries to approach to its target through several maneuvers and the target, namely an evader, expects to escape from the pursuer through its evasive maneuvers. By employing a multi-objective optimization approach, this paper studies the optimal evasion strategy of an evader in which a pursuer uses angles-only navigation.Varieties of evasive maneuver strategies have been proposed. For example, Forte [7] analyzed an equivalent linearized 3-D optimal evasion problem. Shinar [8] obtained a closed-form solution for a switching function and considered the effective navigation gain. The optimal evasive maneuver has also been applied to many aerospace problems. Patera [9-11] firstly proposed an evasive maneuver strategy within the framework of collision probability. Kelly [12] introduced an optimal rendezvous evasive maneuver method using a nonlinear optimization technology. Bombardelli [13] obtained a maneuver direction to maximize the missing distance numerically, which is a function of the arc length separation between the maneuver point and the predicted collision point. In [14], an optimal evasive maneuver was studied for fixed and unfixed maneuver directions, respectively.The above-mentioned studies related to evasive maneuver always assume that ideal measurement could be provided and the influence of navigation performance is hardly considered. In practice, the influence of navigation performance is significant and needs to be analyzed deeply. In this paper, we introduce the observability of a system as a new index by considering accuracy of navigation estimation. As we know, the maneuvers of an evader and pursuer can alter the observability of the system during angles-only navigation [15, 16]. Woffinden [17] obtained an analogic relationship between maneuvers and the system observability in the field of orbit rendezvous. Vallado [18] pointed out that relative motion diversity has a positive correlation with the system observability. Grzymisch and Fichter [19, 20] provided an analytical derivation of the observability conditions to find an optimal maneuver, which could ensure observability and obtain the best possible navigation estimate, simultaneously.Generally, if an evader wants to escape from a pursuer, it is a prerequisite to need an appropriate maneuver direction and sufficient maneuver time. Besides the observability, the relative distance should also be guaranteed during the approaching. Thus, the problem has multiple planning variables and design objectives. The evasive maneuver problem therefore corresponds to a multiobjective optimization problem, and the traditional single objective optimization model (which usually only maximize the relative distance) will encounter great difficulty in solving such an evasive problem.In this work, a novel multi-objective optimization approach is proposed to design evasive maneuvers by introducing an additional new performance index related to system observability. The remainder of this paper is organized as follows. First, the orbital evasion problem is described. Then, the model of observability is established and the degree of observability (DOO) is introduced. A non-dominated sorting genetic algorithm II (NSGA-II) is employed to planning an optimal evasive maneuver, where both DOO and relative distance can be maximized. Finally, an example of optimal evasive maneuvers obtained by multi-objective optimization results is provided and numerical simulations show a desired improvement of DOO and relative distance. In addition, a simulation of the extended Kalman filter (EKF) estimation is performed. The results indicate that the optimal evasive maneuvers can effectively reduce the accuracy of the relative state estimation and weaken the navigation performance.This study was co-supported by the National Natural Science Foundation of China (No. 11272346 and 11402295) and the National Program on Key Basic Research Project (No. 2013CB733100).978-1-4799-7492-4/15/$31.00 © 2015 IEEEII.P ROBLEM O VERVIEWAn orbital evasion problem contains two spacecraft—evader and pursuer. Pursuer’s objective is to approach or capture the evader, and evader’s objective is to escape the pursuer and keep a relative safe distance from it. Assume that a pursuer starts from a rather long distance ( 50 km) with angles-only measurements. In such a distance, the pursuer usually executes two or three impulses to approach the evader, which means the approaching strategy is not time-varying. Therefore, the orbital evasion problem can be regarded as a one-sided optimal control problem. The one-sided optimization problem considers only one player and is equal to a flight path optimization problem.As for a flight path optimization problem, three control variables are needed—the magnitude of the impulse, appropriate maneuver direction and maneuver time. The magnitude of the impulse is constrained by the maneuvering ability of the evader, so the last two are chosen as optimization variables and the first one is set as a constant in this work. Besides the traditional safety index—relative distance, the observability is introduced as an evasive index. The maneuver direction and maneuver time can change the observability of the system, because the observability of the system is related to the relative motion which is influenced by the two optimization variables. Thus the two optimization variables have a coupling relationship with the observability and relative distance.The optimal maneuver is expected to decrease the observability, and maximize the relative distance simultaneously. The evasive maneuver problem becomes an optimization problem that contains two control variables and two objective functions. To solve this multiobjective optimization problem, the quantification model of observability and the multiobjective optimization model is needed.III.O BSERVABILITY QUANTIFICATION In this section, the accuracy degree of relative position and velocity estimation is analyzed. There are different indexes available to describe the observability, such as the distance error metric [22] and condition number of the observability matrix [23]. Different from the previous indexes, a new index to represent the level of state estimation is introduced here and we call it the observability. The covariance matrix of the relative position and velocity estimation is then determined and the DOO of the relative state is analyzed based on the covariance matrix.A.Measurement EquationsIn general, optical camera is the most common measuring equipment, and it provides two angle measurements (azimuth θ and elevation ε) at each instant of time. Figure 1 illustrates the schematic of the geometry of the pursuer-evader system along with the azimuth and elevation angles in the cameraframe, where FPO , FMO, and FEOare the pursuer, camera, andevader coordinate systems, respectively. In the followinganalysis, FMO and FPOare regarded as the same coordinate.The orbital coordinate system is defined as follows: x is directed along the position vector from the center of the earth to the pursuer, y is directed along the inverse direction of the velocity, and z=x⨯y obeys the right-handed coordinate system. Orbital coordinates attached to the evader are similar and are omitted here.Fig. 1.The relationship of relative measurement.Consider an evader in a near-circular orbit. The distance from a pursuer to the evader is fairly smaller than that from the evader to the center of the earth. The Clohessy-Wiltshire equations are therefore applied to describe the relative motion between these two spacecraft.The relative motion of the evader in the orbital coordinates is governed by the dynamics equations as follows:=+X AX BU(1) where A is a state space matrix, B is a control input matrix, and U is acceleration vector. The solution to (1) is(,)(,)dtt t v stt t t sτ=+⎰XΦXΦU(2)where(,)t tΦ is a state transition matrix()(,)e[]rr rvt tr vvr vvΦΦt tΦΦ-⎡⎤===⎢⎥⎣⎦AΦΦΦ(3)If the thrust of pursuer is discrete and an impulse at1kt-isdenoted as1k-∆v, then the relative motion of the pursuer atkt can be presented as1111(,)(,)k k k k v k k kt t t t----=+∆XΦXΦv (4) Equations (2) and (4) give two explicit expressions for the relative state recursion for continuous and discrete thrusts, respectively.If denoting the relative position between the pursuer and evader in the measurement coordinate systemas[]TPEx y z=r, the relationship betweenPEr and the measurement parameters of the optical camera isarctan(/)()arctan(Ey xzεθ⎡⎤⎡⎤==⎢⎥⎢⎥-⎢⎥⎣⎦⎣⎦h X (5)where ε and θ are the elevation and azimuth, respectively. If denoting the distances from the center of the earth to the evader and to the pursuer as E r and P r , respectively, the evader and pursuer are in nearly the same orbital plane and with a phase angle of ϕ during the approaching procedure [21], and they have the following relationship2222cos PEE PE P rr r r r ϕ=+- (6)whereE r(7) In general, E r is prescribed to the pursuer before approaching. From (6) and (7), the transition matrix PE Q from EO F to PO Fis obtained as0001PP PE P P r r r r ⎤⎥⎢⎥=⎢⎥⎢⎥⎣⎦Q (8) Substituting P PE PE =r Q r into (5) leads to the measurement equation()X =+Z h υ(9)where T []εθυυ=υ is the measurement noise of the opticalcamera, ευ and θυ are Gaussian and white with zero mean. From (9), ()X h is a nonlinear matrix function of X , and the measurement sensitive matrix for the EKF can be obtained as follows:()11121323T212223h h h h h h ⨯∂⎡⎤==⎢⎥∂⎣⎦h X H X 0 (10) According to the EKF, (1), (3), (9) and (10) allow us to estimate the relative position and velocity for angles-only relative navigation. From the above, it is not difficult to find that the orbital maneuver from pursuer or evader affects the relative navigation and measurement, and the observability of the system.B. Covariance of Relative State EstimationExpanding (9) at |1ˆk k -X as Taylor series to the first orderapproximation, we get()()()()()|1|1|1Tˆ|1|1ˆˆˆˆk k k k k kk k k k k k k k ---=--∂=+-∂=+-X X h X Z h X XX X h X H X X (11)where |111ˆˆ(,)k k k k k t t ---=X ΦX . Thus we rewrite (11) as()|1|1ˆˆk k k k k k k ---⎡⎤=+-⎣⎦X X H Z h X (12)where H -stands for an arbitrarily generalized inverse matrixof H . Owing to11111ˆ[()]k N k N k N k N k N --+-+-+-+-+=+-X X H Z h X(13)where N =1, 2, 3,…., it can further be rewritten as11111ˆˆ(,)(,)[()]k N k k k N k k k N k N k N t t t t --+-+-+-+-+=+-ΦX ΦX H Z h X (14)or()11111ˆˆ(,)k k k N k k N k N k N t t ---+-+-+-+⎡⎤=+-⎣⎦X X ΦH Z h X (15) where k X is the relative position and velocity estimation at K t from the observation of Z at 1K N t -+. Using theobservations of {}12,,...,K N K N K Z Z Z -+-+ in connection with (12) and (15), we get the expression for the relative state estimation at K t()()11ˆˆ(,)ˆkk ki k i i ii k N k t t --=-+-⎡⎤=+-⎣⎦=+-∑X X ΦH Z h X X ΓZ h (16) where[]T1122(,)(,)k N k N k k N k N k k t t t t -+-+-+-+=ΓH ΦH ΦHTTT T 12k N k N k -+-+⎡⎤=⎣⎦Z Z Z Z()()()TT T T 1122ˆˆˆk N k N k N k N k k-+-+-+-+⎡⎤=⎣⎦h h X h X h X From (16), the accuracy of the relative state estimation is related to the matrix Γ. Assume that k X in (16) is a true description of the relative states, the measurement noise Z h -on the error of the relative state estimation |ˆk k k N --X X is reflected by the characteristics of 1Γ-. The covariance matrixof N measurements of noise is[]12diag N =R R R R(17)where 22diag , 1,2,,i i N θεσσ⎡⎤==⎣⎦R . The covariance matrix of relative state estimation cov P is then obtained as [24]()[][]11T11cov 1(,)(,)k T i i k i i i k i k N t t t t ----=-+⎧⎫==⎨⎬⎩⎭∑P ΓV ΓH ΦR H Φ(18)C. Introduction of Degree of ObservabilityEquation (18) for k N = means that all of the N measurements are used to estimate the relative state in k . Consequently, the covariance matrix of the relative state estimation is[][]1T11cov 1(,)(,)N i i N i i i N i t t t t ---=⎧⎫==⎨⎬⎩⎭∑P H ΦR H ΦFIM (19)where the matrix FIM is the Fisher information matrix [25] of the measurements, which contains the information of the system relative states acquired by the measurement sensor. It should be mentioned that if the matrix 0P (the covariance of the initial relative state estimation) is invertible, (19) is further expressed as [24]11cov 0(--=P P +FIM)(20) From the basic property of the covariance matrix, (19) represents the accuracy of the relative state estimation. Consequently, cov P allows us to define the DOO of the relative states. That is, the DOO of the relative position DOO R and the DOO of the relative velocity DOO Vare defined belowDOO R =(21) DOO V =(22)respectively, where cov ijP represents the i th row and j th column element of cov P . The definition defined above considers the estimated accuracy of all directions, which is more reasonable than other indices. Obviously, the DOO represents the accuracy of the relative state estimation of one spacecraft to the other. The larger the values of DOO R and DOO V are, the lower the accuracy of the relative state estimation is. Moreover, if the observation abilities of two spacecraft are equal, the reciprocal DOO of the pursuer and evader is the same.D. DOO Calculation Based on Fictitious OrbitAs we know, an evasive maneuver changes the coordinate system of the evader, which means that the calculation of the relative states needs to be corrected, otherwise the calculated FIM is incorrect. In order to solve this problem, a fictitious orbit that represents the orbit of a non-maneuvering evader is shown in Fig. 2.k X -,k E Pursuer orbitEvader orbit aftermaneuverFig. 2. Illustration of relative states calculation.Before calculating the DOO, we firstly determine the relative states ,k E X of an evader after maneuver with a fictitious orbit and the relative states ,k P X of a pursuer with the fictitious orbit in k measurements, separately. Accordingly, the relative states of the evader after a maneuver with the pursuer after k measurements can be obtained to be,,k k E k P XX X =- (23) Under such a circumstance, the DOO of the evader and pursuer can be determined.IV. M ULTI -OBJECTIVE O PTIMIZATION M ODELA. Optimization VariablesIn order to optimize the direction of evasive maneuver, an impulse is assumed to be fixed in the following analysis, and azimuth θ, elevation ε, and maneuver time t are selected as three control parameters to be optimized, viz.,T [,,]t εθ=G (24)Taking into account the spatial geometric relationship between the two spacecraft, the constraint conditions for an evasive maneuver problem read322220m t Tππθππε⎧-≤≤-⎪⎪⎨-≤≤⎪⎪≤<⎩ (25) where T is total observation time and m t is maneuver time.In order to simplify our problem further, here we make some observations on the range of the optimization variables. For two moving objects in space, it is well known from [18] that an increased difference of the system relative motion gives rise to an increase of system observability (e.g., the relative motion feature of two coplanar spacecraft in a circle orbit is more unobvious than that in an elliptic orbit). Therefore, the observability of two coplanar spacecraft is weaker than that of two non-coplanar spacecraft, which is equivalent to that the DOO is higher in the present analysis. Due to this reason, the evader prefers to choose an evasive maneuver in a plane, so the values of elevation can be constrained in a range near zero. As for the maneuver time, we constrain it in a constant time κ, the reason for which is that the evasive maneuver has little effect on increasing the DOO if the evasive maneuver is too late. Under such circumstance, new constraint conditions are stated as32200m t ππθεκ⎧-≤≤-⎪⎪⎨=⎪⎪≤<⎩ (26) Thus, two control parameters are left to be optimizedT [,]t θ=G (27)B. Objective FunctionsTo solve a multiobjective optimization problem, a reasonable evaluation index is required to be determined firstly. For the evasive maneuver problem under consideration, the variation of DOO during evasion plays a key role. Also, the minimal relative distance as a traditional safety evaluation index ensures the safety of an evader during its evasion. Based on these considerations, in what follows we choose two indexes —minimal relative distance L and DOO to evaluate the optimization results.During evasion, the evader expects the DOO of the system to be larger. At the same time, the relative distance between thetwo spacecraft also becomes larger. Therefore, we choose an objective function as()()1DOO2max max f R f L ⎧=⎪⎨=⎪⎩G G (28) A multiobjective problem is formulated as a nonlinear constrained problem as follows:12Maximize[(),()]F F G Gwhere 1()F G refers to the DOO function of velocity and 2()F G the relative distance function of velocity. a. DOOSince the DOOs of the relative position DOO R and relative velocity DOO V can be determined by the system state Fisher information matrix in k measurements, from (19) one gets[][]T11FIM (,)(,)kiiki i i k i k N t t t t -=-+=∑H ΦR H Φ (29)Hence the FIM is a function of the relative states depending on the pursuer and evader. For convenience of analysis, it is assumed that the impulse of the pursuer does not change. Consequently, one has 1F expressed by1()(FIM())F F =G G (30)Here DOO R or DOO V can be chosen as an optimization function. In the following, as an example we only take DOO R as an optimization function.b. Minimal Relative DistanceIn order to guarantee the safety of evader, minimal relative distance during the approaching should be considered. Recalling (4), one has the relationship between the relative states and impulse2()(())k F F =G X G (31)Now subtracting the state vectors of one spacecraft from that of the other at k moment, from (22) one obtains the relative states,,k k E k P =-XX X (32) The minimal relative distance ismin((1:3)),1,2,...i L Xi == (33) where i Xis a 6-dimension state function, (1:3)i X is the relative position state vector, and the norm means the 2-norm of a vector.C. NSGA-II AlgorithmIn this study, one of the most well-known multi-objective evolutionary algorithms, the NSGA-II, is employed to solve the multi-objective optimization problem, which was proposed by Deb et al. [26]. This algorithm uses the idea of transforming the multi-objectives to a single fitness measure by the creation of a number of fronts, sorted according to nondomination. During the fitness assignment, the first front is created as theset of solutions that is not dominated by any solutions in the population. These solutions are given the highest fitness and temporarily removed from the population, then a second nondominated front consisting of the solutions that are now nondominated is built and assigned the second-highest fitness, and so forth. This is repeated until each of the solutions has been assigned a fitness. After each front has been created, its members are assigned crowding distances normalized distance to closest neighbors in the front in the objective space) later to be used for niching. The NSGA-II has been successfully applied in spacecraft trajectory optimization, for example, in designing a three-objective impulse rendezvous problem [27] and a two-objective robust rendezvous problem with considering uncertainty [28].V.N UMERICAL S IMULATIONConsider an illustrative example. For simplicity, it is assumed that the orbit control of the pursuer is based on the CW equations. Assume that after pursuer executes an approaching maneuver(00t =), initial relative states 0X at 0t and expected terminal relative states of the pursuer at 2000 s f t = areT 0[41933.5 m,-27232.0 m,-50.0 m,-49.94 m/s,10.18 m/s,0.0]=XT [3000 m,0,0 ,0 m/s,0 ,0.0]f =XThe standard fourth-order Runge-Kutta method is applied in numerical simulation. An optical camera located on the chaser is employed for relative measurements, and the azimuth angle θand the elevation angle ε with standard deviations of 0.001θσ= rad and 0.001εσ=rad are obtained, respectively. An initial range from the pursuer to the evader is taken as 50 km, an initial covariance matrix and a covariance matrix of measurement noise are respectively2222220diag[(2000m),(2000m),(2000m),(5m/s),(2m/s),(1m/s)]=P ,22diag[(0.001rad),(0.001rad)]i =R , i =1, 2, …, NIn addition, the measurement frequency of the optical camera is 1 Hz. The evasive impulse of the evader is fixed to 3m/s and 6m/s in magnitude. All the data mentioned above are acquired based on the project we have ever done.A. Multiobjective Optimization ResultsThe parameters of NSGA-II are as follows: population size, 150; maximum number of generations, 80; probability of crossover, 0.90; and probability of mutation, 0.08. Constraints are chosen the same as those in section IV, and κ=50s is taken. NSGA-II was used to optimize the evasive trajectories for the different configurations. It should be noted that 10independent runs for each test case were completed by considering the stochastic characteristic of the NSGA-II, and all of the Pareto-optimal solutions obtained in the 10 runs were compared and revised by deleting the inferior and repeating solutions. The revised Pareto-optimal solutions of the 10 runs were then regarded as the final Pareto solution set.In order to analyze the influence of the impulse magnitude on the Pareto solutions, different Pareto-optimal fronts were compared. Figure 3 compares the Pareto-optimal fronts withdifferent magnitude of impulse, in which the converged Pareto-optimal solutions are indicated by symbols ―o,‖ ―*‖.4DOO of Relative Position(m)M i n i m a l R e l a t i v e D i s t a n c e (m )Fig. 3. Pareto fronts with different impulse magnitude.Each one of scattered data in Fig. 3 depends on its two optimal control parameters T [,]t θ=G , namely the maneuver direction and maneuver time. It is known from Fig. 3 that the magnitude of impulse has a more obvious effect on minimal relative distance than DOO of relative position. It can be seen that insome specific zones, the solutions become discontinuous. It is easier to understand this from the relationship of relative position and estimation. Both relative distance and measurements influence the value of DOO of relative position. A larger relative distance with good measurements (which means that the relative trajectory is more far away from the trajectory without maneuver) and a smaller relative distance with bad measurements can obtain similar DOO, thus discontinuity generates. These can be seen in Sec V.C and Woffinden obtained similar results in [17]. For different safety requirements of minimal relative distance and DOO of relative states, it is easy to choose a suitable solution from optimal solutions in Fig. 3, so the evader can acquire a desired minimal relative distance and terminal relative state estimation.B. Confirmation of pareto optimalityFig. 3 shows a number of Pareto solutions that were obtained by NSGA-II. However, thus far, the Pareto optimality of these solutions has not yet been verified. This section partially shows the Pareto optimality of the solutions bycomparing them with the DOO-optimal and distance-optimal solutions.4DOO of Relative Position(m)M i n i m a l R e l a t i v e D i s t a n c e (m )Fig. 4. Comparisons between Pareto-optimal, DOO-optimal, and Distance-optimal solutions.Assuming the magnitude of impulse is 3m/s, by using an optimization approach based on genetic algorithm, we obtained the DOO-optimal and distance-optimal solutions. The terminal DOO R of DOO-optimal solution is 946.94m and L is 9160m, as listed in Table I. Three Pareto-optimal solutions obtained by NSGA-II are also listed in Table I. Without considering the performance of DOO, only the minimal relative distance L is chosen as the objective function in order to obtain the distance-optimal solution. This solution is obtained with a function value of DOO R 185.94m, and in correspondence with L 11538m, as listed in Table I. The case without maneuver is also listed in Table I for comparison. Three Pareto-optimal solutions obtained by NSGA-II are also listed in Table I. The DOO-optimal, distance-optimal, and Pareto-optimal solutions are plotted in Fig. 4. It can be seen that the DOO-optimal solution is located at the end point of the Pareto-optimal fronts. The distance-optimal solution is near the end point of the Pareto-optimal fronts, which may because the prematurity of the algorithm we used. Therefore, the solutions obtained using NSGA-II are confirmed by the Pareto optimality by comparing them with the DOO-optimal and the distance-optimal solutions.TABLE I. C OMPARISON OF P ARETO -O PTIMAL , DOO-O PTIMAL , AND D ISTANCE -O PTIMAL Index Terminal DOO R (m)Minimal relative distance L(m)θ(rad)t (s) DOO-Optimal 946.94 9160 -3.066 20 Pareto-Optimal 1 941.37 9182 -3.052 15 Pareto-Optimal 2 806.33 9395 -3.086 9 Pareto-Optimal 3 239.24 10241 -3.226 0 Distance-Optimal 185.94 11538 -3.781 0 Without maneuver36.632310From Table I, the terminal DOO with DOO-optimal evasive maneuver is quite higher than that with distance-optimal, meaning that the terminal accuracy of the relative states with optimal evasive maneuver estimation is much lowerthan that without evasive maneuver and that with maneuver of largest relative distance. As shown in Table I, a comparison of Pareto-solution 3 with the distance-optimal solution shows that a 12.67% improvement in distance is obtained with an decrease in the DOO by 53m (22.28%). On the other hand, a comparison of the DOO-optimal solution with Pareto-solution 1 shows that an decrease in DOO by 5.57 m (0.59%) results in an improvement of minimal relative distance L by only 0.24%. Seeing from Table I and Fig. 3, another conclusion is that DOO is more correlated with maneuver direction and maneuver time than the magnitude of maneuver.C. Solution Validation using Trajectory SimulationIn what follows the effectiveness of simulations is validated through relative motion with 3- error ellipses. Figure 5 shows the error ellipses of the in-plane relative position estimation of the angles-only relative navigation with different evasion maneuver and without evasion maneuver. The control parameters in Fig.5 are obtained from Table I. It is seen from Fig. 5 that the size of the error ellipses of both relative motions decreases during approaching, since both the changing azimuth with time and the increasing number of measurements will improve the estimated accuracy. However, when the evader escapes with optimal evasion maneuver, the error ellipses change much more slowly. Moreover, the eccentricity of all the error ellipses of two relative motions is very large, and the major axis of all these error ellipses points to the evader, which indicates that the uncertainty of the relative position is large along the LOS direction.At the simulation time of 2000 s, the major axis length of the error ellipses without maneuver and with distance-optimal are all smaller than that with DOO-optimal evasion maneuver. With the optimal evasive maneuver, it is clear that the evader effectively increases the uncertainty of the relative position estimation along the LOS direction for angles-only relative navigation.x 1044x(m)y (m )Fig. 5. Error ellipses of in-plane relative position estimation of the threetypes of relative motions.VI. C ONCLUSIONSThis paper studied the orbital evasion problem using multi-objective evolutionary algorithms. The quantized model of observability is introduced as a new index, and DOO is introduced as one new objective function. This approach takes the navigation estimation —degree of observability (DOO) andtraditional safety index —minimal relative distance into account. We employed the NSGA-II to design evasive maneuvers. The results show that the proposed approach can effectively and efficiently demonstrate the relations among the mission characteristic parameters, in which it is found that DOO is more correlated with maneuver direction and maneuver time than the magnitude of maneuver. The proposed approach offers a new view in solving orbital evasion problem.R EFERENCES[1] Forte, I., Steinberg, A., and Shinar, J., ―The Effects of Non -LinearKinematics in Optimal Eva sion,‖ Optimal Control Applications and Methods, Vol. 4, pp. 139-152, 1983.[2] Shinar, J., Rotsztein, Y., and Bezner, E., ―Analysis of Three -Dimensional Optimal Evasion with Linearized Kinematics,‖ Journal of Guidance and Control, Vol. 2, No. 5, 1979, pp. 353-360.[3] Chan F K., ―Spacecraft maneuvers to mitigate potential collisionthreats,‖ AIAA 2002-4629, 2002.[4] Sanchez-Ortiz N., Bello-Mora M., Klinkrad H., ―Collision avoidancemaneuvers during spacecraft mission lifetime: risk reduction and required ΔV ,‖ Advance s in Space Research, Vol. 38, pp. 2107-2116, 2006.[5] Kim H. D., Kim H. J., ―Optimal collision avoidance maneuver tomaintain a LEO station keeping,‖ IAC -10-A6.2.9, 2010.[6] Shima T., ―Optimal Cooperative Pursuit and Evasion Strategies Againsta Homing Missile,‖ Journal of Guidance, Control and Dynamics, Vol. 34, No. 2, pp. 414-425, 2011.[7] Forte, I., Steinberg, A., and Shinar, J., ―The Effects of Non -LinearKinematics in Optimal Evasion,‖ Optimal Control Applications and Methods, Vol. 4, pp. 139-152, 1983.[8] Shinar, J., and Steinberg, D., ―Analysis of Optimal Evasive ManeuversBased on a Linearized Two-Dimensional Kinematic Model,‖ Journal of Aircraft, Vol. 14, No. 8, pp. 795-802, 1977.[9] Patera R. P. ―General method for calculating satellite collisionprobability,‖ Jo urnal of Guidance, Control and Dynamics, Vol. 24, No. 4, pp. 716-722, 2001.[10] Patera R. P. ―Satellite collision probability for nonlinear relativemotion,‖ Journal of Guidance, Control and Dynamics, Vol. 26, No. 5, pp. 728-733, 2003.[11] Patera R. P., Peterson G E. ―Space vehicle maneuver method to lowercollision risk to an acceptable level,‖ Journal of Guidance, Control and Dynamics, Vol. 26, No. 2, pp. 233-237, 2003.[12] Kelly B D, PicciottoS D. Probability based optimal collision avoidancemaneuvers. AIAA 2005-6775.[13] Bombardelli, Claudio. ―Analytical formulation of impulsive collisionavoidance dynamics,‖ Celestial Mechanics & Dynamical Astronomy, Vol. 118, No. 2, pp. 99-114, 2014.[14] H. Wang, H. Y. Li, G. J. Tang . ―Collision Probability Based OptimalCollision Avoidance Maneuver in Rendezvous and Docking,‖ Journal of Astronautics, Vol. 29, No. 1, pp. 220-223, 2008.[15] Nardone, S. C., and Aidala, V. J. ―Observability Criteria for Bearings -Only Target Motion Analysis,‖ IEEE Transactions on Aerospace and Electronic Systems, Vol. 17, No. 2, pp. 162-166, 1981.[16] Hammel, S. E., and Aidala, V. J. ―Observability Requirements forThree-Dimensional Tracking via Angle Measurements,‖ IEEE Transactions on Aerospace and Electronic Systems, Vol. 21, No. 2, pp. 200-207, 1985.[17] Woffinden , D. C., and Geller, D. K. ―Observability Criteria for Angles -Only Navigation,‖ IEEE Transactions on Aerospace and Electronic Systems, Vol. 45, No. 3, pp. 1194-1208, 2009.[18] Vallado D. A., ―Evaluating Gooding Angles-only Obit Determination ofSpace Based Space Surveillance Measurements,‖ Presented at the AAS Born Symposium, 2010.[19] Grzymisch, J., and Fichter, W., ―Observability Criteria andUnobservable Maneuvers for In-Orbit Bearings-Only Navigation,‖。