基于神经网络误差补偿的预测控制
基于动态反馈神经网络模型的数控机床热误差实时预报补偿

∞ t t y0st ep r n l a h eust ay i e c n t th dl r i n e e b xe m t t Ter l s s f i th i m e e c ad sd eo f i ad a e s t  ̄f f e a ts o i p dt s
基 于动 态反 馈 神 经 网络 模 型 的 数 控 机 床 热误 差 实 时预 报 补 偿
唐 治 闰开印 田怀文 ( 西南交通大学 机械工程学院 , 成都 60 3 ) 10 1
Re lt rdcie c mp n a inf h r l ro fNC a— i p e it o e s t or e ma r ro me v o t e
c mp n ae c i o l h r l ro. o e s tsNC ma hn to e ma e t e r
Ke r s y wo d :Dy a i e d a k n u a ewo k Re l t e p e itv o p n a in NC n m c fe b c e r l n t r ; a - i r d cie c m e s to ; m
【 bt  ̄】 h fc o ahn g cu c ue em l r r Cm ci o adt A s a Teeetfm c i n cr yc sdb r a e o o N ahn t l n r f i a a a yh r f eo h e
ky atr w ihl dt a r r r nl e Tetema r r N c i ope ie y e fcos hc a t r l o eaay d h r l o Cmahn t l rdc db e oh m e a e z" h e o f e o t nua ntokilcba d tipp rA dnmifeb knua tokm dlspeet . h erl ew r s uu rt h  ̄e. ya c eda rl w r o e rsn d Te e s c e e n i e
神经网络预测控制综述

( ) 数模 型为预测模型的预测控制算法 。参数模型分为差分方 2以参
程模型和离散状 态空间模型 [] 1 o 。差分方程模型是一种离散时间动态模 型, 它分为确定性差分方程和随机性差分方程 。 通常 , 预测控制采用随机 差分方 程( C R A模型 、A I A模型 )状态空间模型是一种描述动 如 A M C RM 。 态系统 的完整模 型 , 它不仅反 映系统 的输入输 出关 系 , 而且还 能揭示系 统 内部 , 以及 内部与外部的联系 , 型由状 态方程 和输 出方程组成。 该模 基 于参数模 型的预测控 制算法( 括 G C G P 吸取 了 D C的滚 动优化 包 P ,P) M 策略 , 在预测模 型和反馈机制等 方面保留了 自校正控制 的优点 , 同时克
多采用这类模 型 ,如 S l石油公 司的 Q M e l D C和 St i 公 司 的 I C M eot pn DO 软件包 等。文献I ] 中有 I C M软件包成功应用于一个 2 0M 汽轮发 s DO 5 W 电机组控 制的例子 , 它的基础算 法是 M C算法 , A 但根据控制与辨识在算
维普资讯
S I E H I F R A I ND V L P E T&E O O Y C - C O M TO E E O M N T N CNM
文章编号 :0 5 6 3 ( 0 7 1 — 15 0 10 — 0 3 2 0 )5 0 5 — 3
20 年 07
第 1 卷 第 1 期 7 5
收稿 日期:O 7 0 - 0 2o—32
神 经 网 络 预 测 控 制 综 述
代正梅 , 田建艳
( 太原 理工大学信息工程学院 , 山西太原 ,30 4 002 )
摘
一种基于神经网络的鲁棒型预测控制算法
信号代替量测输出, 提高系统鲁棒性以及降低控制器对未建模动 态的敏感性t 然后, 用遗传算法(A 作为滚动优化策略, G ) 求解系 统的全局最优解的新型预测控制方法 。
2 基于遗传算法的神经网络预测控制系统
预测模型的功能是根据对象 的历 史信息和未来输入预测其
未来输出, 这里只强调模型的功能而不强调其结构形式。 滚动优 化是指反复在线进行优化, 反馈校正可以在保持预测模型不变的 基础上, 对未来的误差作出预测并加以补偿。 本文采用Em n la 回 归神经网络对非线性系统进行预测,为预测控制建立模型,用
G A进行滚动优化 。
+基金 项 目:国家 自 然科 学基金 ( 编号:6 7 4 4 0 0 4 3)
收 稿 日期 : 0 -0 - 2 6 6 2 0 3
1 引言
复杂工业过程中普遍存在着一种时滞、 慢时变、 强干扰的非 线『 生 控制对象, 由于难于获得系统的数学模型… 所以由经典的 , 控制理论和现代的控制理论所产生的控制方法难以 在实际应用中 取得 良 好的应用效果。 针对这一类典型的非线性控制对象, 利用 复合控制的思想。 首先 , 利用神经网络为预测控制建立模型, 并 考虑到神经网络为非缵『系统建立预测模型[ , 生 2 有时会存在较大 . 的训练误差 ,而且这种误差难以通过对网络的进一步训练而缩 小, 这样建立的预测模型就会存在较大的建模误差影响控制, 为 此本文将系统实际输出与预测输出综合成的新的输出信号, 由该
n t r o e t h e ei lo ih i r s ne hsp p r Th up t ftep a ti e lc db h o bn — ewo km d l wiht eg n t ag rt m sp e e td i t i a e . eo t u ln sr pa e y tec m i a c n o h to ft es se o t u n h d l u p o ice s h d p iea ii n o u te soபைடு நூலகம் ec nr l r An h i no h y tm u p t d te mo e tut n r a ete a a t b l y a dr b sn s ft o tol . d te a o t v t h e g n t lo ih i s d t b an teo ln o l e ro t iai n e ei ag rt m su e oo ti h n ien n i a p i z to . c n m Ke o d : o l e rs tm ; e r l e wo k; rd ci ec n r l: o u t y W r s n ni a yse n u a t r p e itv o to r b s n n
基于人工神经网络的工程质量预测模型

基于人工神经网络的工程质量预测模型在当今的工程领域,确保工程质量是至关重要的。
为了能够提前对工程质量进行有效的预测和把控,基于人工神经网络的工程质量预测模型应运而生。
这种模型凭借其强大的学习能力和适应性,为工程质量的管理和控制提供了新的思路和方法。
首先,我们来了解一下什么是人工神经网络。
简单来说,人工神经网络就像是一个能够自我学习和调整的智能系统。
它由大量相互连接的节点,也就是神经元组成,通过这些神经元之间的信息传递和处理,来实现对输入数据的学习和分析,并给出相应的输出结果。
在工程质量预测中,人工神经网络的应用具有诸多优势。
其一,它能够处理大量复杂的数据。
工程建设过程中会产生各种各样的数据,如材料性能、施工工艺、环境条件等,这些数据之间往往存在着复杂的非线性关系。
传统的统计方法在处理这类问题时可能会显得力不从心,而人工神经网络则能够很好地应对这种复杂性,挖掘出数据中的隐藏模式和规律。
其二,它具有良好的泛化能力。
也就是说,通过对已有数据的学习,人工神经网络可以对未曾见过的新数据进行较为准确的预测。
其三,它能够自适应地调整自身的参数,以适应不同的工程场景和数据特点。
那么,如何构建一个基于人工神经网络的工程质量预测模型呢?第一步是数据收集。
这是整个模型的基础,需要收集与工程质量相关的各种数据,包括但不限于工程设计参数、施工过程中的监控数据、材料质量检测数据等。
这些数据的质量和数量直接影响着模型的准确性和可靠性。
接下来是数据预处理。
收集到的数据往往存在噪声、缺失值和异常值等问题,需要进行清洗、归一化和标准化等处理,以便于模型的学习和计算。
例如,将不同量纲的数据统一到相同的尺度上,使得它们在模型中具有可比性。
然后是模型的设计和训练。
在选择人工神经网络的结构时,需要考虑到工程问题的特点和数据的规模。
常见的神经网络结构包括多层感知机、卷积神经网络和循环神经网络等。
在训练模型时,通过不断调整神经元之间的连接权重,使得模型的输出与实际的工程质量数据尽可能接近。
基于神经网络误差补偿的预测控制研究毕业论文

基于神经网络误差补偿的预测控制研究毕业论文目录摘要............................................... 错误!未定义书签。
1 预测控制 (2)1.1 预测控制的产生 (2)1.2 预测控制的发展 (3)1.3 预测控制算法及应用 (4)1.3.1模型控制算法(Model Algorithmic Control,MAC) (5)1.3.2动态矩阵控制(Dynamic Matrix Control,DMC) (5)1.3.3广义预测控制(Generalized Predictive Control,GPC) (5)1.3.4极点配置广义预测控制 (5)1.3.5内模控制 (5)1.3.6模糊预测控制 (6)1.4 预测控制的基本特征 (6)1.4.1预测模型 (6)1.4.2反馈校正 (6)1.4.3滚动优化 (6)1.5预测控制的现状 (7)2 神经网络 (7)2.1 人工神经网络的生理原理 (8)2.2 神经网络的特征 (10)2.3 神经网络的发展历史 (11)2.4 神经网络的内容 (12)2.5 神经网络的优越性 (14)2.6 神经网络研究方向 (14)2.7 神经网络的应用分析 (14)2.8 神经网络使用注意事项 (17)2.9 神经网络的发展趋势 (18)2.10 BP神经网络 (18)2.10.1 BP神经网络模型 (18)2.10.2 BP网络模型的缺陷分析及优化策略 (19)2.10.3 神经网络仿真 (20)3.动态矩阵控制 (22)3.1 预测模型 (22)3.2 滚动优化 (23)3.3 反馈校正 (24)3.4 有约束多变量动态矩阵控制及其线性化 (27)3.5 动态矩阵控制仿真 (29)4 基于神经网络误差补偿的预测控制 (32)4.1 研究背景 (32)4.2 传统PID控制 (33)4.2.1位置式PID控制 (33)4.2.2 增量式PID控制 (35)4.3 基于神经网络的动态矩阵控制 (37)4.4 基于神经网络输出反馈的动态矩阵控制研究 (40)4.5 基于神经网络误差补偿的动态矩阵控制 (46)4.6 仿真效果验证 (51)总结 (57)参考文献 (58)1 预测控制1.1 预测控制的产生预测控制的产生,并不是理论发展的需要,而首先是工业实践向控制提出的挑战。
基于神经网络的闭环控制学习算法
基于神经网络的闭环控制学习算法一、神经网络在闭环控制中的应用概述神经网络作为一种强大的机器学习模型,其在闭环控制系统中的应用日益广泛。
闭环控制系统,又称为反馈控制系统,是指系统输出与期望输出之间存在反馈回路的控制系统。
在这种系统中,控制算法根据系统输出与期望输出之间的误差来调整控制输入,以达到控制目标。
神经网络因其出色的非线性映射能力和自适应学习能力,在处理复杂系统和不确定性环境中显示出了巨大的潜力。
1.1 神经网络的基本原理神经网络是由大量简单的计算单元(称为神经元)组成的网络,这些神经元通过加权连接相互连接。
每个神经元接收输入信号,进行加权求和,并通过激活函数处理后输出。
通过调整神经元之间的连接权重,神经网络可以学习到输入与输出之间的复杂映射关系。
1.2 神经网络在闭环控制中的作用在闭环控制系统中,神经网络可以用于建模、预测、控制和优化等多个方面。
它可以学习系统的动态行为,预测系统的未来状态,或者直接作为控制器来调整控制输入。
此外,神经网络还可以用于处理系统的不确定性和非线性,提高系统的鲁棒性和适应性。
二、基于神经网络的闭环控制学习算法基于神经网络的闭环控制学习算法是一类利用神经网络来实现闭环控制的算法。
这些算法通过训练神经网络来学习控制策略,以实现对系统的精确控制。
以下是几种典型的基于神经网络的闭环控制学习算法:2.1 反向传播算法(Backpropagation)反向传播算法是神经网络中最常用的学习算法之一。
它通过计算网络输出与期望输出之间的误差,并将误差反向传播至网络的输入层,以此调整网络权重。
在闭环控制系统中,反向传播算法可以用来训练神经网络控制器,使其能够根据系统误差来调整控制输入。
2.2 强化学习算法(Reinforcement Learning)强化学习是一种无模型的学习算法,它通过与环境的交互来学习最优策略。
在闭环控制系统中,强化学习算法可以使神经网络控制器通过试错来学习如何控制系统,以达到最优性能。
基于神经网络的机械系统误差预测与修正方法

基于神经网络的机械系统误差预测与修正方法近年来,随着人工智能和机器学习的发展,神经网络成为许多领域中的热门研究方向。
机械系统是其中之一。
在机械系统的运行过程中,误差的积累是常见问题之一。
本文将介绍基于神经网络的机械系统误差预测与修正方法,旨在提高机械系统的精度和稳定性。
一、误差预测机械系统中的误差来源多种多样,包括传感器的噪声、机械结构的不精确性和外界环境的干扰等。
传统的误差预测方法主要依赖于物理模型,但这种方法对于误差的复杂性和变化性较难处理。
因此,基于神经网络的误差预测方法应运而生。
神经网络是一种模仿人脑神经元网络的数学模型,其可以通过训练学习到大量的数据以及其与输出之间的关系。
对于机械系统,我们可以将输入定义为系统的工作状态和环境参数,输出定义为误差的预测值。
通过对大量数据的训练,神经网络可以学习到系统的误差特征,从而实现误差的准确预测。
二、误差修正误差预测只是解决机械系统误差问题的一部分,修正误差是更为关键的环节。
通过误差修正,我们可以使系统的输出达到预期的精度和稳定性。
在基于神经网络的机械系统误差修正方法中,我们可以利用误差预测的结果来调整系统的工作参数。
例如,对于一个机械臂系统,通过改变关节的角度或速度,我们可以减小误差的影响。
此外,神经网络还可以通过反馈控制的方式进行误差修正。
将神经网络的预测结果与实际输出进行对比,通过调整系统的控制信号来修正误差。
除了参数调整和反馈控制,基于神经网络的机械系统误差修正方法还可以利用学习能力来提高修正效果。
通过不断地更新神经网络的权重和偏置,使其逐渐适应系统的误差特征。
这种自适应学习的方法可以使机械系统具有更好的鲁棒性和适应性,有效地降低误差。
三、实验与应用为了验证基于神经网络的机械系统误差预测与修正方法的有效性,许多实验研究已经进行。
其中,一些研究人员采用了基于深度学习的神经网络模型,成功地实现了对机械系统误差的准确预测和修正。
这些实验结果表明,基于神经网络的方法相比于传统的方法具有更高的准确度和稳定性。
基于BP_神经网络的PID_控制算法参数优化
- 22 -高 新 技 术从本质上来看,PID 控制算法就是对比例、积分和比例微分间的关系进行控制的一种算法。
PID 控制调节器具有适应性强、鲁棒性良好的特征,因此被广泛应用于工业控制领域。
但是,随着科学技术、控制理论发展,在工业生产中被控对象逐渐向复杂化和抽象化的趋势发展,并呈现滞后性、时变性和非线性的特征,这使传统PID 控制器难以精准调控这种较复杂的控制系统。
为了解决该问题,研究人员将控制理论与其他先进的算法相结合,形成全新的控制理论,包括神经网络控制、遗传算法以及模糊控制等。
对神经网络算法来说,由于其具有较高的鲁棒性和容错性,因此适用于复杂的非线性控制系统中,并且具有广阔的应用前景和较大的发展潜力。
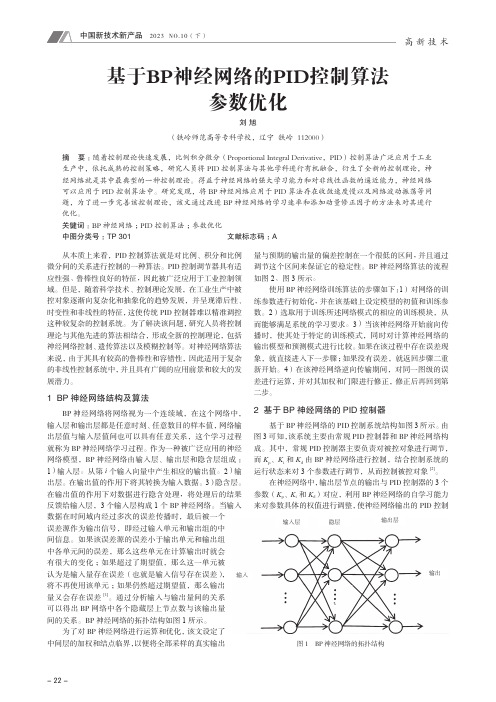
1 BP 神经网络结构及算法BP 神经网络将网络视为一个连续域,在这个网络中,输入层和输出层都是任意时刻、任意数目的样本值,网络输出层值与输入层值间也可以具有任意关系,这个学习过程就称为BP 神经网络学习过程。
作为一种被广泛应用的神经网络模型,BP 神经网络由输入层、输出层和隐含层组成:1) 输入层。
从第i 个输入向量中产生相应的输出值。
2) 输出层。
在输出值的作用下将其转换为输入数据。
3) 隐含层。
在输出值的作用下对数据进行隐含处理,将处理后的结果反馈给输入层,3个输入层构成1个BP 神经网络。
当输入数据在时间域内经过多次的误差传播时,最后被一个误差源作为输出信号,即经过输入单元和输出组的中间信息。
如果该误差源的误差小于输出单元和输出组中各单元间的误差,那么这些单元在计算输出时就会有很大的变化;如果超过了期望值,那么这一单元被认为是输入量存在误差(也就是输入信号存在误差),将不再使用该单元;如果仍然超过期望值,那么输出量又会存在误差[1]。
通过分析输入与输出量间的关系可以得出BP 网络中各个隐藏层上节点数与该输出量间的关系。
BP 神经网络的拓扑结构如图1所示。
为了对BP 神经网络进行运算和优化,该文设定了中间层的加权和结点临界,以便将全部采样的真实输出量与预期的输出量的偏差控制在一个很低的区间,并且通过调节这个区间来保证它的稳定性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于神经网络误差补偿的预测控制华北电力大学科技学院自动化07K3 聂和兵摘要非线性系统预测控制已成为一个有着广阔前景的研究热点。
预测控制的多步预测和滚动优化有克服建模误差影响的能力,使控制系统具有一定的鲁棒性。
但研究表明,预测控制对模型失配的鲁棒性是有限的,仍需要一个较准确的预测模型。
实际系统大都是难以准确建模的非线性系统,如何提高预测的精确性以增强控制系统鲁棒性是非线性系统预测控制研究的重要问题。
建立在反馈校正原理上的预测误差补偿是一种有效的方法。
本文提出了一种基于对象定量和定性信息的组合预测控制方法,但其只是对一类特殊对象而言。
本文对模型失配误差用Bp 网络建模, 构成误差修正DMC 算法, 然而由于经训练的网络权值固定不变, 当工况发生较大变化时, 修正后的预测值仍有可能产生较大误差。
本文利用一种权值可以在线调整的动态Bp 网络对模型预测误差进行拟合并与预测模型一起构成动态组合预测器,在此基础上形成对模型误差具有动态补偿能力的预测控制算法。
由于该算法显著提高了预测精度,从而增强了预测控制算法的鲁棒性。
关键词:预测控制神经网络动态矩阵误差补偿Error compensation based on neural network predictive controlAbstractPredictive control of nonlinear systems has become a promising research focus. Predictive control of multi-step prediction and rolling optimization has the ability to overcome the effects of modeling errors, the control system has a certain robustness.But studies show that mismatch the model predictive control robustness is limited, still need a more accurate prediction models.The actual system are mostly difficult to accurately model nonlinear systems, how to improve forecast accuracy to enhance the robustness of control systems predictive control of nonlinear systems is an important issue. Based on the principle of feedback on the forecast error correction is an effective method of compensation.This paper presents an object-based combination of quantitative and qualitative information predictive control, but only in terms of a special class of objects. In this paper, the model mismatch error with Bp network modeling, error correction form DMC algorithm, but because of trained network weights are fixed when the conditions changed greatly, the revised forecast is still possible to have agreater error. This use of a weight you can adjust the dynamic online Bp network model prediction error and prediction models to be combined together constitute the dynamic combination of predictors, on the basis of the formation of the model error has the ability to predict the dynamic compensation control algorithm. Since the algorithm significantly improves the prediction accuracy, thus increasing the predictive control algorithm robustness.Keywords:Predictive Control Neural network Dynamic MatrixError compensation目录摘要 (1)1 预测控制 (5)1.1 预测控制的产生 (5)1.2 预测控制的发展 (6)1.3 预测控制算法及应用 (7)1.3.1模型控制算法(Model Algorithmic Control,MAC) (7)1.3.2动态矩阵控制(Dynamic Matrix Control,DMC) (7)1.3.3广义预测控制(Generalized Predictive Control,GPC) (7)1.3.4极点配置广义预测控制 (8)1.3.5内模控制 (8)1.3.6模糊预测控制 (8)1.4 预测控制的基本特征 (8)1.4.1预测模型 (8)1.4.2反馈校正 (9)1.4.3滚动优化 (9)1.5预测控制的现状 (9)2 神经网络 (10)2.1 人工神经网络的生理原理 (10)2.2 神经网络的特征 (13)2.3 神经网络的发展历史 (14)2.4 神经网络的内容 (15)2.5 神经网络的优越性 (16)2.6 神经网络研究方向 (16)2.7 神经网络的应用分析 (17)2.8 神经网络使用注意事项 (20)2.9 神经网络的发展趋势 (20)2.10 BP神经网络 (21)2.10.1 BP神经网络模型 (21)2.10.2 BP网络模型的缺陷分析及优化策略 (22)2.10.3 神经网络仿真 (22)3.动态矩阵控制 (25)3.1 预测模型 (25)3.2 滚动优化 (26)3.3 反馈校正 (27)3.4 有约束多变量动态矩阵控制及其线性化 (29)3.5 动态矩阵控制仿真 (32)4 基于神经网络误差补偿的预测控制 (35)4.1 研究背景 (35)4.2 传统PID控制 (36)4.2.1位置式PID控制 (36)4.2.2 增量式PID控制 (38)4.3 基于神经网络的动态矩阵控制 (40)4.4 基于神经网络输出反馈的动态矩阵控制研究 (43)4.5 基于神经网络误差补偿的动态矩阵控制 (49)4.6 仿真效果验证 (54)总结 (60)参考文献 (61)1 预测控制1.1 预测控制的产生预测控制的产生,并不是理论发展的需要,而首先是工业实践向控制提出的挑战。
众所周知,上世纪60年代初形成的现代控制理论在航空、航天等领域取得了辉煌的成果。
利用状态空间法去分析和设计系统,提高了人们对被控对象的洞察能力,提供了在更高层次上设计控制系统的手段。
特别是立足于最优性能指标的设计理论和方法已趋成熟,这对于在工业过程中追求更高控制质量和经济效益的控制工程师来说,无疑有着极大的吸引力。
然而人们不久就发现,在完美的理论与控制之间还存在着巨大的鸿沟。
主要表现在以下几个方面:1.现代控制理论的基点是对象精确的数学模型,而在工业过程中所涉及的对象往往是多输入、多输出的高维复杂系统,其数学模型很难精确建立,即使建立了模型,从工程应用的角度来说,往往需要简化,从而很难保证对象精确的模型。
2.工业对象的结构、参数和环境都有很大的不确定性。
由于这些不确定性的存在,按照理想模型得到的最优控制在实际上往往不能保证最优,有时甚至引起控制品质的严重下降。
在工业环境中人们更关注的是控制系统在不确定性影响下保持良好性能的能力,即所谓鲁棒性,而不能只是追求理想的最优性。
3.工业控制中必须考虑到控制手段的经济性,对工业计算机的要求不能太高.因此控制算法必须简易以满足实时性的要求.而现代控制理论的许多算法往往过于复杂,难以用低性能的计算机实现。
这些来自实际的原因,阻碍了现代控制理论在复杂工业过程中的有效应用。
也向控制理论提出了新的挑战。
为了克服理论与实际应用之间的不协调,上世纪70年代以来.除了加强对系统辨识、模型简化、自适应控制、鲁棒控制等的研究外.人们开始打破传统方法的约束,试图面对工业过程的特点,寻找各种对模型要求低,控制综合质量好、在线计算方便的优化控制新算法。
在此期间,数字计算机技术的飞速发展,也为新算法的产生提供了物质基础。
预测控制就是在这种背景下发展起来的一类新型计算机优化控制算法。
1.2 预测控制的发展最早产生于工业过程的预测控制算法,有Rechalet.Mehra等提出的建立在脉冲响应基础上的模型预测启发控制(Model Perdictive Heuristic Control,简称WHC,或模型算法控制(Model Algorithmic C ontrol,简称MAC),以及Cutler等提出的建立在阶跃响应基础上的动态矩阵控制(Dynamic Matrix Control,简称DMC)。
由于脉冲响应、阶跃响应易于从工业现场直接获得,并不要求对模型的结构有先验知识。
这类预测控制算法汲取了现代控制理论中的优化思想,但采用滚动优化的策略,计算当前控制输入取代传统最优控制,并在优化控制中利用实测信息不断进行反馈校正,所以在一定程度上克服了不确定性的影响,增强了控制的鲁棒性。
此外,这类算法在线计算比较容易,非常适合于工业过程控制的实际要求。
上世纪70年代后期,模型控制算法(MAC)和动态矩阵控制(DMC)分别在锅炉、分馏塔和石油化工装置上获得成功的应用,从而引起了工业控制界的广泛兴趣。
此后,基于对象脉冲或阶跃响应的各种预测控制算法相继出现,在石油、化工、电力等领域的过程控制中取得了明显的经济效益。
上世纪80年代初,人们在自适应控制的研究中发现.为了克服最小方差控制的弱点,有必要汲取预测控制中的多步预测优化策略,这样可以大大增强算法的适用性与鲁棒性。