Submachine-Gun-Designer-s-Handbook
BarTender 2022版本Starter Professional版本对比说明书
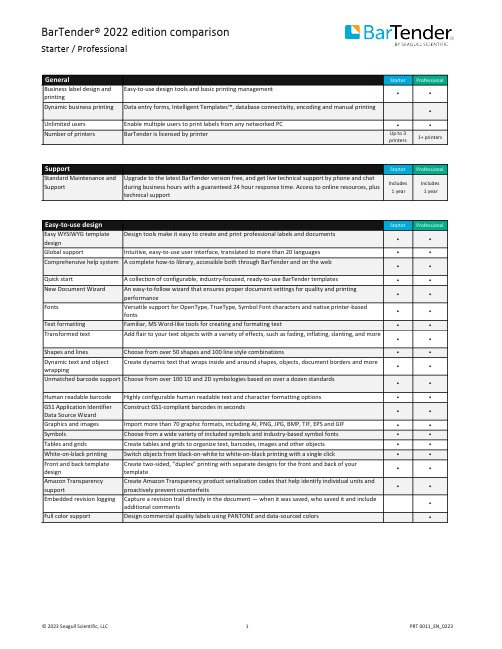
--Starter ProfessionalBusiness label design and printing Easy-to-use design tools and basic printing management••Dynamic business printing Data entry forms, Intelligent Templates™, database connectivity, encoding and manual printing•Unlimited users Enable multiple users to print labels from any networked PC••Number of printers BarTender is licensed by printer Up to 3printers1+ printers----Starter ProfessionalStandard Maintenance and Support Upgrade to the latest BarTender version free, and get live technical support by phone and chatduring business hours with a guaranteed 24 hour response time. Access to online resources, plustechnical supportIncludes1 yearIncludes1 year----Starter ProfessionalEasy WYSIWYG template design Design tools make it easy to create and print professional labels and documents••Global support Intuitive, easy-to-use user interface, translated to more than 20 languages••Comprehensive help system A complete how-to library, accessible both through BarTender and on the web••Quick start A collection of configurable, industry-focused, ready-to-use BarTender templates••New Document Wizard An easy-to-follow wizard that ensures proper document settings for quality and printingperformance••Fonts Versatile support for OpenType, TrueType, Symbol Font characters and native printer-basedfonts••Text formatting Familiar, MS Word-like tools for creating and formating text••Transformed text Add flair to your text objects with a variety of effects, such as fading, inflating, slanting, and more••Shapes and lines Choose from over 50 shapes and 100 line style combinations••Dynamic text and object wrapping Create dynamic text that wraps inside and around shapes, objects, document borders and more••Unmatched barcode support Choose from over 100 1D and 2D symbologies based on over a dozen standards••Human readable barcode Highly configurable human readable text and character formatting options••GS1 Application Identifier Data Source Wizard Construct GS1-compliant barcodes in seconds••Graphics and images Import more than 70 graphic formats, including AI, PNG, JPG, BMP, TIF, EPS and GIF••Symbols Choose from a wide variety of included symbols and industry-based symbol fonts••Tables and grids Create tables and grids to organize text, barcodes, images and other objects••White-on-black printing Switch objects from black-on-white to white-on-black printing with a single click••Front and back template design Create two-sided, “duplex” printing with separate designs for the front and back of yourtemplate••Amazon Transparency support Create Amazon Transparency product serialization codes that help identify individual units andproactively prevent counterfeits••Embedded revision logging Capture a revision trail directly in the document — when it was saved, who saved it and includeadditional comments•Full color support Design commercial quality labels using PANTONE and data-sourced colors•----Starter Professional Suppression Ignore the content of a data source under certain conditions••Label templates Design and automation tools that leverage data to reduce the number of label files you manage•Conditional printing Create data-driven automation rules that specify when different objects, layers or templates inyour document will visibly print or become hidden•Template selector Conditionally print one specific template when multiple templates are available in a document•Layers Template objects may be stacked, hidden and reordered when created on uniquely identifiablelayers•Automatic face detection and cropping Automated image capture creates perfectly cropped photos for ID badges and card printing•Scriptable object properties Modify the look and feel of template objects by using Visual Basic (VB) scripts•----Starter Professional Date and time Dynamically source dates and times from Windows or clock-enabled printers••Data validation and processing Specify data validation rules and automatically correct data or issue warnings••Concatenate data Create text and barcode objects that combine information from multiple data sources••Basic database connectivity Import variable data from Excel or a RFC 4180 standard CSV files into your template••Simple serialization Increase or decrease your serial string data by increments of one (1)••Named database connections Name commonly used database connections to quickly add them to new document designs••Database filters Print select database records using convenient query and filter options#•Database sourced tables Easily create tables using data from a database or external file#•Dynamic data preview See how your document handles real dynamic data during the design process#•Dynamic graphics and images Automatically source images for printing based on selected database records or queries#•Embedded database tables Create your own database tables that travel with your BarTender document designs•Enhanced database connectivity Connect document designs to over 20 data sources such as SAP, Oracle, MS SQL, Azure SQL, XML,Excel, text files and more to print dynamically•Advanced serialization Create serial numbers that support alphanumeric, hexadecimal and custom sequencing patterns•Create a database Build your own database from scratch using intuitive tools included with BarTender•Write back to databases Write back to SQL-based databases to keep track of printed records, serial numbers and muchmore•Visual Basic (VB) scripting Create scripts for custom data processing•Global database field Centralize a data field and share it between BarTender documents•----Starter Professional Database record selection Select or query the correct database records at print time using helpful form controls•Powerful form controls Make data input and selection easy by leveraging over 15 highly configurable form controls•Keyboard and mouse input Use keyboard and mouse commands to select or enter data into forms at print time•Scanner input Use a barcode scanner to input information to data entry forms at print time•Weighing scale input Populate the weight of an item at print time by connecting your weighing scale to BarTender•Image capture Capture images at print time for ID cards or event badge printing•Data validation Reduce user input errors by introducing data validation and error checking•----Starter Professional Drivers by Seagull™More than 7,000 printers and output devices supported to enable high-performance printing••Print optimizations Improve print speed by taking full advantage of printer-based features such as serialization,barcodes, real-time clock, static data and graphic caching••Windows printer drivers Print to any printer that has a Windows-based driver••Printer configuration and diagnostics Perform printer management functions in BarTender, bypassing the printer front panel••On-demand and batch printing Print labels and documents on-demand or batch together using one or more BarTendertemplates••Print preview Review your dynamic print jobs before printing••Image exporting Export entire template images or specific objects in 35+ formats••RFID, smartcard and magnetic stripe encoding Encode RFID tags, smartcards and magnetic stripe cards as easily as adding barcodes to yourtemplate design•Native PDF generation Generate PDFs without installing third-party PDF drivers•----Starter Professional Status monitoring Reports information back to Windows regarding printer/print job status and error conditions••Email alerts Automatically notify IT managers or other operational team members if labeling problems occur••----# Basic databases only (Excel or RFC 4180 standard CSV file)BarTender Release 11.3 R5 and later versions。
SubCreator 基础教程
SubCreator 基础教程一、简介subcreator是由Radoslaw Strugalski编写的强大好用的创建时间轴程序。
目前最新版1.1.程序本身可以打开divx影片和其他格式媒体文件,然后把各种文本字幕转换为基于时间的各种格式.各位学会使用subcreator后就能方便的制作各种影片的外挂字幕了二、SUBCREA TOR主要功能介绍!(一些不常用到的功能将会略过) file-->new 新建时间轴文件open 打开含有时间轴的文件(目前支持srt,smi,ssa,txt格式)open most recent ...reload 从新读取save 储存save as 另存为export 输出(生成外挂字幕文件,里面还含有设置外挂字幕的颜色和出现位置等功能)processing 处理exit 退出edit-->undo xxx 撤销上一步行为redo 回复所撤销行为cut 剪切copy 复制past 粘帖delete 删除select all 选择全部find 查找find next 查找下一个replace 取代timing-->set timestamp 设置时间点(可以用来设置字幕的开始点和结束点) increase timestamp 时间点提前decrease timestamp 时间点滞后increase duration 结束点提前decrease duration 结束点滞后delete timestamp 删除时间点enable smart timestamp adding 开启智能时间点添加movie-->open 打开avi文件(注:和file中的open不要搞混,不然可能非法x作) close 关闭play 播放stop 停止small step forward 小幅前进large step forward 大small step backword 小幅后退large step backword 大jump to start 跳至片头jump to end 跳至片尾sync to text 与文档同步(视频跳至当前编辑字幕文档段落处)sync to movie 与视频同步(文档跳至当前播放视频处)注意:快键可能和输入法所设置的快键有冲突,所以请先关闭输入法的快键或改成其它的与其不冲突的.option-->change editor font 变更编辑文档字体change subtitle font 变更屏显字幕字体general setting 设置video engine setting 视频引擎设置(有时播放不流畅可以通过这个来换一个引擎来播放,或许会有意想不到的惊喜)OPTIONS--->general setting里的设置default subtitle是默认显示字幕时间,设的大点可以保证字幕不会过早消失(推荐设置为30)MAX SUBTITLE LINE是一屏最大显示字幕行数,设置2已经足够了SMALL STEP :是用于设置视频步进幅度。
奥佳华 按摩小件产品OG-2620天鹅棒 使用说明书

㝉㨶㝠╻User ManualOG-2620 Magic Swan 天鹅棒 手持按摩器感谢您购买奥佳华天鹅棒手持按摩器,使用前请仔细阅读操作手册,并特别注意安全事项,以便正确操作和使用本产品。
本手册提供使用者安全及有效的操作方式,请在阅毕后妥为收藏,以便日后参考查询。
安全指引保修权限产品零件及配件产品特性及使用示意操作方式及功能说明产品规格故障排除产品保养奥佳华中国官网:目录 CONTENTS2678991011安全指引a)重要安全事项说明●为确保安全及正确使用产品,使用前请务必详细参阅操作 手册。
●请务必依照本操作手册内的产品用途使用本产品。
●使用完毕后或清洁产品前,请将电源插头从插座中拔除。
●为避免因过热而导致走火、触电或造成伤害,请勿将产品置于枕头或毯子等不易散热的环境下操作。
●请勿覆盖使用,以免造成马达温度过高而导致故障或损坏。
●请勿让儿童自行操作本产品。
●身心功能障碍与伤残者请谨慎使用,如需使用务必有旁人的指导且能负责其安全。
●如在按摩进行中感到不适,请立即停止按摩。
●下列状况发生时,切勿使用本产品:电源线或电源插头损坏;操作不正常;曾掉落地面或者损伤;曾浸入水或者其它液体中。
请联系维修服务中心进行检查和维修。
●请勿使用非制造商所推荐的零配件。
●请勿将物品插入或者掉落产品的任何开口中。
●切断电源前,请先将所有的操作控制关闭,然后将电源插头由插座中拔除。
b)使用环境●请勿在潮湿或过多灰尘的环境下使用产品,以免产品发生故障。
●请勿在室温高于40℃的环境下使用本产品。
●请勿将产品放置户外。
●请勿将产品置放于电热器旁、炉具附近或者阳光直射处。
c)不适宜使用本产品的人士如果您有以下任何情形之一,使用前请先咨询医生。
●正在接受医生治疗者或身体感觉不适者●高血压、心脏病、脑动脉硬化、脑血栓患者●患有恶性肿瘤者●孕妇及月经期妇女●患有骨骼疏松症●正在使用心脏起搏器或者植入医疗器者●患有急性疾病者●未成年人23d)开关注意事项●请勿用湿手操作控制开关。
Submachine4攻略
Submachine4 攻略*游戏包含21个蓝色小球作为隐藏关卡.初始阶段(实验室顶棚)1.按提示向右走,找到锤子.2.向左2次,向下,向右.用锤子砸开门上的锁.进入阁楼.3.向下,在挂着的衣服口袋里找到萘(像药丸一样的东西).4.向右,在梁上取得橡皮管.5.向右,在墙角处取得烟囱刷,在椅子上取得小球1.6.走出阁楼.将烟囱刷伸入烟囱里.7.返回阁楼,找到烟囱底部,取得灰堆上的淡蓝色钥匙.8.向左走,在挂钩上取得黄色钥匙.9.向左,在桌子左下角取得黄色把手.10.用淡蓝色钥匙开门,进入.11.向下,在画面右下角取得小球2.12.向下,进入Laboratory.Laboratory(实验室)1.向左,点电脑.点右下方的键,不停点,与电脑进行对话.直到听到打印声.(或者点到只出现(@lab):root.ping//144.235.182.100为止,这条信息没什么用.)2.退出电脑界面.取得打印机上的纸条.可以看到是一份提示(提示1里包含了几个空间的坐标,之后有用).3.在桌脚废纸箱边取得小球3.4.走到右边,在窗台上取得打火机.5.返回,向下走.在画面左下角取得烧杯.6.向下,在倒下的椅子上取得小球4,收集桌上的2张纸.7.去左边的浴室,将烧杯放在地上的排水口处,用锤子敲掉上方管道的铁盖子.8.在左边水管下方取得小球5,在洗脸台上取得肥皂.9.退出浴室.向右走,在桌上拿到CD.10.上梯子,在试管架上取左数第二支试管.11.向右,在实验台上取得螺丝刀,在管道右下方取得小球6.12.用橡皮管连接煤气灯和煤气管道,将黄色把手安装在管道上.转动把手和煤气灯开关,用打火机点燃煤气灯.13.快速返回直至室外.在最左边找到一个阀门.用螺丝刀拧下螺丝,取得阀门.14.回到浴室,将阀门装在左边管道上.转动阀门,让烧杯盛满水.15.走到煤气灯处,将盛水的烧杯放在煤气灯上,依次放入肥皂,试管中液体和萘.16.取烧杯和空试管回到浴室.用同样的方法在试管里盛满水.17.向右到底,用黄色钥匙打开门.点钟.18.将烧杯内液体倒入控制板,破坏它.可看到右边的铁栅栏上升.19.向右,取地上的纸片.看提示1,得知当前所在空间为Laboratory,坐标为0,0,1.而下一步应进入坐标为1,0,4的Ancient Section.20.把时空机上数字点成1,0,4.点开关,转换空间进入Ancient Section.Ancient Section(古老的部分)1.向右,观察所有的石板图案.参考下方的"/","|","-","\"4个开关可知,开关组合出相应图形即能打开对应石板下的门.由此可以取得2块三角板,一个圆形石块和一个方形石块.*注意在右边某石板处取得一把黄色的小刀,在其左边有钟,点一下.而在图形为"+"的石板界面内,左下角可取得小球7.2.向上走,将圆形和方形石块插入对应的缺口处,可使新的阶梯出现.3.向上,用锤子打破马雕像下方已有裂缝的石板,取得小球8.4.向上,看到新的石板图案.用同样的方法取得该石板门下的三角板3.5.向上,用小刀割断绳子,走到下面拿到三角板4.6.向下,在狗雕像的眼睛处取得小球9.7.将4块三角板插到墙上对应的洞口里.可以看到中间出现一个按钮,点它.8.回到时空机界面,可以看到出现了新的石梯,上梯子.取得机器上像罩子一样的能量装置.9.向左走,捡起地上的纸片.10.回到时空机,根据提示1,输入6,9,0.点开关,进入Looping Traps.Looping Traps(循环陷阱)1.向右,向下,拿到地上的纸片.2.向左,在地板上拿到小球10.3.向左,向上,可以看到坐标器.推理可知时空机坐标为(0,0).左右分别是横坐标和纵坐标.则其他几个封闭的机器坐标分别为(0,1),(1,1),(-1,-1),(1,0).4.点坐标器,调成相应坐标后点按钮,去到对应的机器处.点机器,使灯变绿.5.将4个机器全部调整完毕后,进到坐标器的上方.点开机器的罩子,取得蓝色的碟片.6.回到时空机,根据提示1,输入5,2,9.点开关,进入Basement SectionBasement Section(地下室部分)1.向右2次,将能量装置置于充电装置上充电.在右边插头下方取得小球11.2.取充好电的能量装置.向左,向下,向左.插入机器,点拉杆,给机器供电.取空了的能量装置和画面右下角的纸片.3.向右,在主机器的右下角(电线下)取得小球12.4.用同样的方法在能量装置充电后给右边的机器供电.退出后点击主机器,看到有激光射出.5.向上,把CD放在钩子上,使激光弯折.6.向右,把蓝色碟片放在柱子上,用激光击碎它.得到银色钥匙.房间左下角拿纸片7.再给能量装置充一次电后,回到时光机界面.8.根据提示7,输入5,5,1.(此时不能根据提示1直接进入4,6,2.否则进去后除了捡小球什么事也干不了.)5,5,1 空间(水管控制室)1.捡右边地上的小球13.2.向左,捡起地上的纸片.把水的开关关掉.3.回时光机,现在可以根据提示1输入4,6,2.点开关,进入Lighthouse Digouts.Lighthouse Digouts(灯塔地下掩体)1. 向右,取得地上小球14.2. 向右,用锤子敲击锁4下.打开门,取得涡轮。
斑马技术公司DS8108数字扫描仪产品参考指南说明书

NORMA 4000 5000 Power Analyzer 用户说明手册说明书
Since some countries or states do not allow limitation of the term of an implied warranty, or exclusion or limitation of incidental or consequential damages, the limitations and exclusions of this warranty may not apply to every buyer. If any provision of this Warranty is held invalid or unenforceable by a court or other decision-maker of competent jurisdiction, such holding will not affect the validity or enforceability of any other provision.
BEGRENZTE GEWÄHRLEISTUNG UND HAFTUNGSBESCHRÄNKUNG
Fluke gewährleistet, daß jedes Fluke-Produkt unter normalem Gebrauch und Service frei von Material- und Fertigungsdefekten ist. Die Garantiedauer beträgt 2 Jahre ab Versanddatum. Die Garantiedauer für Teile, Produktreparaturen und Service beträgt 90 Tage. Diese Garantie wird ausschließlich dem Erster
三自由度机械手毕业设计

摘要机械手是在自动化生产过程中使用的一种具有抓取和移动工件功能的自动化装置,由其控制系统执行预定的程序实现对工件的定位夹持。
完全取代了人力,节省了劳动资源,提高了生产效率。
本设计以实现铣床自动上下料为目的,设计了个水平伸缩距为200mm,垂直伸缩距为200mm具有三个自由度的铣床上下料机械手。
机械手三个自由度分别是机身的旋转,手臂的升降,以及机身的升降。
在设计过程中,确定了铣床上下料机械手的总体方案,并对铣床上下料机械手的总体结构进行了设计,对一些部件进行了参数确定以及对主要的零部件进行了计算和校核。
以单片机为控制手段,设计了机械手的自动控制系统,实现了对铣床上下料机械手的准确控制。
关键词:机械手;三自由度;上下料;单片机AbstractManipulator , an automation equipment with function of grabbing and moving the workpiece ,is used in an automated production process.It perform scheduled program by the control system to realize the function of the positioning of the workpiece clamping. It completely replace the human, saving labor resources, and improve production efficiency.This design is to achieve milling automatic loading and unloading .Design a manipulator with three degrees of freedom and 200mm horizontal stretching distance, 120mm vertical telescopic distance. Three degrees of freedom of the manipulator is body rotation, arm movements, as well as the movements of the body. In the design process, determine the overall scheme of the milling machine loading and unloading manipulator and milling machine loading and unloading manipulator, the overall structure of the design parameters of some components as well as the main components of the calculation and verification. In the means of Single-chip microcomputer for controlling, design the automatic control system of the manipulator and achieve accurate control of the milling machine loading and unloading.Key words: Manipulator; Three Degrees of Freedom; Loading and unloading; single chip microcomputer目录摘要.........................................................................I第1章绪论.............................................................11.1选题背景................................................... (1)1.2设计目的.........................................................11.3国内外研究现状和趋势............................................21.4设计原则.........................................................2第2章设计方案的论证..................................................32.1 机械手的总体设计...............................................32.1.1机械手总体结构的类型....................................32.1.2 设计具体采用方案........................................42.2 机械手腰座结构设计.............................................52.2.1 机械手腰座结构设计要求.................................52.2.2 具体设计采用方案........................................52.3 机械手手臂的结构设计...........................................62.3.1机械手手臂的设计要求....................................62.3.2 设计具体采用方案........................................72.4 设计机械手手部连接方式.........................................72.5 机械手末端执行器(手部)的结构设计...........................82.5.1 机械手末端执行器的设计要求.............................82.5.2 机械手夹持器的运动和驱动方式..........................92.5.3 机械手夹持器的典型结构.................................92.6 机械手的机械传动机构的设计..................................102.6.1 工业机械手传动机构设计应注意的问题...................102.6.2 工业机械手传动机构常用的机构形式.....................102.6.3 设计具体采用方案.......................................122.7 机械手驱动系统的设计.........................................122.7.1 机械手各类驱动系统的特点..............................122.7.2 机械手液压驱动系统.....................................132.7.3机身摆动驱动元件的选取................................132.7.4 设计具体采用方案.......................................142.8 机械手手臂的平衡机构设计.....................................14第3章理论分析和设计计算............................................163.1 液压传动系统设计计算..........................................163.1.1 确定液压传动系统基本方案...............................163.1.2 拟定液压执行元件运动控制回路...........................173.1.3 液压源系统的设计........................................173.1.4 确定液压系统的主要参数.................................173.1.5 计算和选择液压元件......................................243.1.6机械手爪各结构尺寸的计算...................................26 第4章机械手控制系统的设计..........................................284.1 系统总体方案..................................................284.2 各芯片工作原理................................................284.2.1 串口转换芯片............................................284.2.2 单片机...................................................294.2.3 8279芯片...............................................304.2.4 译码器...................................................314.2.5 放大芯片................................................324.3 电路设计..................................................334.3.1 显示电路设计............................................334.3.2 键盘电路设计............................................334.4 复位电路设计..................................................334.5 晶体振荡电路设计.............................................344.6 传感器的选择..................................................34结论.....................................................................36致谢.....................................................................37参考文献................................................................38CONTENTS Abstract (I)Chapter 1 Introduction (1)1.1 background (1)1.2 design purpose (1)1.3 domestic and foreign research present situation and trends (2)1.4 design principles (2)Chapter 2 Design of the demonstration (3)2.1manipulator overall design (3)2.1.1 manipulator overall structure type (3)2.1.2 design adopts the scheme (4)2.2 lumbar base structure design of mechanical hand (5)2.2.1 manipulator lumbar base structure design requirements (5)2.2.2specific design schemes (5)2.3mechanical arm structure design (6)2.3.1 manipulator arm design requirements (6)2.3.2 design adopts the scheme (7)2.4 design of mechanical hand connection mode (7)2.5 the manipulator end-effector structure design (8)2.5.1 manipulator end-effector design requirements (8)2.5.2 manipulator gripper motion and driving method (9)2.5.3 manipulator gripper structure (9)2.6 robot mechanical transmission design (10)2.6.1 industry for transmission mechanism of manipulator design shouldpay attention question (10)2.6.2 industrial machinery hand transmission mechanism commonlyused form of institution (10)2.6.3 design adopts the scheme (12)2.7 mechanical arm drive system design (12)2.7.1 manipulator of various characteristics of the drive system (12)2.7.2 hydraulic drive system for a manipulator (13)2.7.3 Body swing the selection of drive components (13)2.7.4 Design the specific use of the program (14)2.8 mechanical arm balance mechanism design (14)Chapter 3 Theoretical analysis and design calculation (16)3.1 hydraulic system design and calculation (16)3.1.1 the basic scheme of hydrauic transmission system (16)3.1.2 formulation of the hydraulic actuator control circuit (17)3.1.3 hydraulic source system design (17)3.1.4 determine the main parameters of the hydraulic system (17)3.1.5 calculation and selection of hydraulic components (24)3.1.6 Manipulator calculation of the structural dimensions (26)Chapter 4 The robot control system design (28)4.1 Overall scheme (28)4.2 Chip works (28)4.2.1 serial conversion chip (28)4.2.2 MCU (29)4.2.3 8279 chip (30)4.2 .4 decoder (31)4.2.5 amplifier chip (32)4.3 Circuit design (33)4.3.1 show the circuit design (33)4.3.2 The keyboard circuit design (33)4.4 Reset circuit design (33)4.5 crystal oscillation circuit design (34)4.6 sensor selection (34)Conclusion (36)Acknowledgements (37)References (38)第1章绪论1.1选题背景机械手是在自动化生产过程中使用的一种具有抓取和移动工件功能的自动化装置,它是在机械化、自动化生产过程中发展起来的一种新型装置。
BDS Start to End Simulation说明书
BDS, Start to End Simulation, BDS Start to End Simulation Simulation Codes Summary yD. SchulteD SchultePresentations•Deepa Angal-Kalinin: Beam dynamics issues in BDSg p •Peter Tenenbaum: Possible migration to Accelerator Makeup Language•Glen White: BDS tuning simulation•Andrea Latina:Static and Dynamic Alignment of the CLIC BDS Andrea Latina: Static and Dynamic Alignment of the CLIC BDS •Javier Resta Lopez: Start to End simulations with intra-train feedbackTony Hartin:Luminosity performance with multiple feedbacks •Tony Hartin: Luminosity performance with multiple feedbacks •Peter Tenenbaum: Lucretia status and plans•Andrea Latina: PLACET : New features and plans•Paul Lebrun: CHEF status and plan•Roger Barlow: Issues in Simulating the Effects of Wakefields •Steve Malton: Interfacing BDSIM with PLACET, wakefield Steve Malton:Interfacing BDSIM with PLACET wakefieldcalculations of collimator•Isabell Melzer-Pellmann: Lumi scans with wakefields in MerlinBDS tasks related to LET (1)()•BDS has the most different styles of magnets;BDS has the most different styles of magnets;standardize the magnets and reduce the styles •Magnets on strings–Additional correctors/PSs–How will it affect the tuning + beam basedalignment–How will it affect the performance after push-pull •Temperature requirements in the tunnel and its effect on beam stabilityb bili•Stability requirements for push-pull•Angle feedback and integration of other feedbacks?Angle feedback and integration of other feedbacks?•Effect of wakes from pumping ports, vacuum chamber misalignments, resistive wall, IR wakes, HOM heating, wake fields from crab, spoilers, other transitions….k fi ld f b il th t itiBDS tasks related to LET (2) Laser wire•Define requirements on emittance measurement (absolute/relative) of train (or bunch) every ? second? Æbeam tuning procedureof train(or bunch)every?second?beam tuning procedure •The present design of laser wire assumes 300 scans per train, which drives the requirements of the laserD d b t i di ti b t lli ti•Do we need any beam spotsize diagnostics between collimation region and IP (somewhere in the final focus?)yCrab system–To understand and verify requirements on the crab cavity mode damping from beam dynamics point of view. e.g.g,y 10E+4 for SOM is difficult from RF design, but may berelaxed with intra-train feedback?–The alignment of crab cavity and effects of the orbit offset in sextupoles may be perhaps fixed with some smallin sextupoles may be perhaps fixed with some smallvertical crab cavity nearby the main one.•Low energy parameters•Work plan is being developed•Lattices to be frozen in autumBDS AlignmentBDS Ali t100nm BPM resolution needed in sextupoles•100nm BPM resolution needed in sextupoles•Quad shunting+DFSy p–Is the systematic error important?•Multi-knobs, also high order needed•Studies using one beam and it’s mirror yield 90% at better than 110%l i it110% luminosity–Independent beams yield 90% at better than75%slower convergence–slower convergence•1e-3 magnet error significantly impacts convergence•Intra-pulse beam-beam offset feedback kick limited by sextupole •200nm stability requirement for quadrupoles•Main goal is to have a verification by another studyATF2•ATF2 is an important test•Can take advantage of flight simulators•Need to fully study alignment and tuning Need to fully study alignment and tuning –E.g. losses can be a problem•Simulation of ATF2Simulation of ATF2–Spot size measurement is slow (1 minute)–Convergence speed crucial–Spot size growth 1nm/hourCLIC BDS Alignment •Few-to-few and DFS used•DFS problematic since response to energy deviation not linear•Collimations system alignment works •FFS alone does not workFull optimisation (brute force) with simplex •Full optimisation(brute force)with simplex works on 50% of the casesy–No solution yet•Could still be starting point for ILC second BDS alignment studyg yCLIC BDS Dynamic Effects•Choice of orbit feedback gain–Ground motion requires yields gain>0.01 tocorrect orbit–BPM resolution requires gain<0.3BPM l ti i i03•Very tight quadrupole stability requirements –Fractions of nm for final doublet–Nanometer for other magnets–Need to use stabilisation•Should also run this for ILCI t t d F db k St di Integrated Feedback Studies Continuation of studies started by Glen •Continuation of studies started by Glen•From linac to IP–Including fast IP feedbackIncluding fast IP feedback–Bunch compressor should come soonMulti bunch tracking•Multi-bunch tracking–Realistic main linac, undulator not usedy g y •Ground motion C or K yield 85% of target luminosity •Smoother luminosity increase during feedback than before–Banana effect is less important•Crab cavities and collimator wakefields to be includedFeedback Optimisation •Basic idea is to exploit luminosityinformation to speed up beam-beam i f ti t d b boffset feedback convergence•Based on Javier’s integrated simulation •Luminosity based on pair signal Luminosity based on pair signal•Optimise gain for minimum luminosity loss•Looks an interesting approachBeam-Beam Scans •Translate emittance growth intoluminosity lossTry to optimise collision in presence of •Try to optimise collision in presence of imperfection along the machine •Banana effect is reduced compared to B ff t i d d d t TESLAWakefield Models •Linear wakefields seem OK for main studiest di•Need something better for loss studiesg•Uncertainties still exist–Comparison between formulaeComparison between formulae•Check proper implementationBenchmarking with experiments–Benchmarking with experiments•Experiments are not easyBDSIM-PLACET Interface•BDSIM is a vital code for BDS studies –Halo and background studies–But not aimed at alignment and tuning studies •Geometry information–Currently: Halo tracking in BDSIM, core inPLACET–General lattice information–ImperfectionsDeck Format•Current deck format is based on XSIF –Parser is available and can be added to programs P i il bl d b dd d t•Slow transition to AML is planned–Until 2010 both formats (XSIF+AML) will beU til2010b th f t(XSIF AML)ill bsupportedAML is similar to XML–AML is similar to XML–An AML parser is available and can be used •Can also read and write SIF•Has been tied to PLACET•Plans exist to tie it to SAD, LUCRETIA and MERLINLUCRETIA •MATLAB based toolkit–Performs tracking–Correction and tuning is user supplied •LIAR and DIMAD are no longer supported •Mass production runs using MATLAB compiler •Used for ATF2•To be included–UndulatorU d l t–IR solenoid–Better cavity wakesBetter cavity wakes•Reference documentation availableTutorial to come–Tutorial to come•Way cool with it’s own cultPLACET•tcl/tk and OCTAVE interfacey–Dynamic libraries•AML interface+some more available •Coherent/incoherent synchrotron radiation •Collimator wakes, also from GdfidL •Misalignment, correction and tuning routines are includedi l d d–Can use your own ones, if you like •Preliminary MPI version existsPreliminary MPI version exists•Halo and tail generation module•Some reference manual availableSome reference manual available–Tutorials on the webOnline help–Online help•Used for ATF2CHEF•A libraryA library–Contains tracking–Correction and tuning left to the userp •Wakefields are to be improved •Significant modifications•XSIF interface rewrittenSome concerns about status of AML •Some concerns about status of AMLConclusion•Integrated simulations move forward •Confirmation of BDS alignment is neededg p •Interesting ideas on feedback improvements •Several codes are being developed–Way cool, way hot...Way cool way hot•More work to be done。