ADAMS参数化建模及优化设计
Adams应用教程第10章ADAMS参数化建模及优化设计
【Adams应用教程】第10章ADAMS参数化建模及优化设计第10章 ADAMS参数化建模及优化设计本章将通过一个具体的工程实例,介绍ADAMS/View的参数化建模以及ADAMS/View 提供的3种类型的参数化分析方法:设计研究(Design study)、试验设计(Design of Experiments, DOE)和优化分析(Optimization)。
其中DOE是通过ADAMS/Insight来完成,设计研究和优化分析在ADAMS/View中完成。
通过本章学习,可以初步了解ADAMS参数化建模和优化的功能。
10.1 ADAMS参数化建模简介ADAMS提供了强大的参数化建模功能。
在建立模型时,根据分析需要,确定相关的关键变量,并将这些关键变量设置为可以改变的设计变量。
在分析时,只需要改变这些设计变量值的大小,虚拟样机模型自动得到更新。
如果,需要仿真根据事先确定好的参数进行,可以由程序预先设置好一系列可变的参数,ADAMS自动进行系列仿真,以便于观察不同参数值下样机性能的变化。
进行参数化建模时,确定好影响样机性能的关键输入值后,ADAMS/View提供了4种参数化的方法:(1)参数化点坐标在建模过程中,点坐标用于几何形体、约束点位置和驱动的位置。
点坐标参数化时,修改点坐标值,与参数化点相关联的对象都得以自动修改。
(2)使用设计变量通过使用设计变量,可以方便的修改模型中的已被设置为设计变量的对象。
例如,我们可以将连杆的长度或弹簧的刚度设置为设计变量。
当设计变量的参数值发生改变时,与设计变量相关联的对象的属性也得到更新。
(3)参数化运动方式通过参数化运动方式,可以方便的指定模型的运动方式和轨迹。
(4)使用参数表达式使用参数表达式是模型参数化的最基本的一种参数化途径。
当以上三种方法不能表达对象间的复杂关系时,可以通过参数表达式来进行参数化。
参数化的模型可以使用户方便的修改模型而不用考虑模型内部之间的关联变动,而且可以达到对模型优化的目的。
RSSR机构的ADAMS参数化建模及优化技术研究
RSSR机构的ADAMS参数化建模及优化技术研究CUI Suhua;ZHANG Jingmei;YANG Songlin;DING Zhaopeng【摘要】为对空间RSSR四杆机构进行优化设计,以RSSR机构为研究对象,运用解析法对RSSR机构进行了运动学分析,得出RSSR机构的运动解析式,确定曲柄存在条件的表达式;利用ADAMS软件参数化编程技术,将空间四杆机构关键点参数化,构建三维参数化模型;运用ADAMS软件的二次开发技术,开发了空间RSSR四杆机构的参数化建模及分析优化系统,实现了RSSR机构运动类型的判定、快速建模、机构仿真、运动分析及优化;最后,进行了实例分析.结果表明,对于给定的RSSR机构,系统运动分析优化后,摇杆的角速度、角加速度的最大值和最小值的绝对值明显减小,摇杆摆动速度趋于平稳.研究结果对提高RSSR机构的设计效率、减少设计周期具有参考价值.【期刊名称】《河北工业科技》【年(卷),期】2019(036)001【总页数】6页(P9-14)【关键词】计算机辅助设计;ADAMS;RSSR;参数化建模;优化设计【作者】CUI Suhua;ZHANG Jingmei;YANG Songlin;DING Zhaopeng【作者单位】【正文语种】中文【中图分类】TH112;TH113.2在工业机械中,空间连杆机构比平面杆机构具有更紧凑的结构外形、更复杂的运动形式,可用更少构件实现复杂多样的空间轨迹,工作可靠性更高[1-3],应用范围广泛。
如剑织机的引纬机构,飞机中的升降舵传动机构、副翼操纵机构等。
含有首末2个转动副和中间2个球面副的空间四杆机构一般用RSSR表示。
近20年,关于空间RSSR四杆机构的研究方法主要有矢量法、解析法、方向余弦矩阵法、复数法、图解法等[4-7]。
图解法需从三维到二维投影变换,作图复杂,在二维平面内难以完整表达机构的三维几何信息,准确性差[8]。
解析法需运用向量或矩阵等数学工具,计算量大,计算机编程复杂[9]。
ADAMS参数化建模及优化设计解析

实体名称的创建
”Command Navigator>“geometry”->“create” >“shape”,双击“cylinder”创 建几何实体,在名字框可以改 动几何实体的名称 (一定要将 几何实体创建到它属于的部 件)。
Marker的创建
“Center Marker”编辑框中, 右击鼠标选择“Marker” ,在 出现的子菜单中点击 “Create”,弹出创建Marker 的对话框,使用缺省名字。 ”Location“编辑框中,右击 鼠标,选择“Pick Location”, 然后用鼠标在图形区中选择 点“uca_knuckle”,在对话 框的下拉菜单中选择“Along Axis orientation”,选择点 “uca_f_center”,见图10-12。 (表示创建的Marker“Z”轴方 向为点“uca_knuckle”指向 点“uca_f_center”方向,这 指定了所创建圆柱体的轴线 方向)
ADAMS参数化建模及优化设计
华中科技大学CAD中心
参数化的四种方法
参数化点坐标 使用设计变量 参数化运动方式 使用参数表达式
参数化建模应用实例
以双摆臂独立前悬架运动学模型为例 以参数化点坐标的方式进行参数化建模
双摆臂独立前悬架拓扑结构
主要部件:上摆臂 (UCA)、下摆臂 (LCA)、转向节 (Knuckle)、横向拉 杆(Tie Rod)、测试 台(Test Plane)、地 面(Ground)
参数化点的确定
能为模型对象位置和方向定位
根据点能创建模型可视化几何实体
模型的参数化表
序号
名称
1 lca_r_center 2 lca_f_center 3 lca_knuckle 4 uca_r_center 5 uca_f_center 6 uca_knuckle 7 tierod_middle 8 tierod_knuckle 9 hookref 10 knuckle_center 11 wheel_center 12 wheel_outer 13 wheel_inner 14 test_plane
Adams参数化与优化分析功能介绍
Adams参数化与优化分析经典案例在机械产品设计进程中,有各种各样的性能指标,甚至有些指标是相互制约的,因此很难通过一次设计就得到满意的结果。
以往采用的手动修改方法费时费力,浪费资源。
使用Adams软件,用户可以通过参数化及优化功能自动完成机械系统的设计,得出最优化的方案,大大提高设计效率。
参数化和优化是用户关注度最高的功能之一,但在Adams基本包的官方培训教程中没作重点介绍。
本期信工诚向大家分享一个参数化与优化方面的经典案例,帮助大家尽快熟悉这一功能。
案例摘自陈志伟编著的《MSC Adams多体动力学仿真基础与实例解析》一书中的第七章。
问题描述:小球在一定倾角的斜板上在重力作用下滑落,研究该倾角为多少时可以顺利通过预先设置的圆环中心。
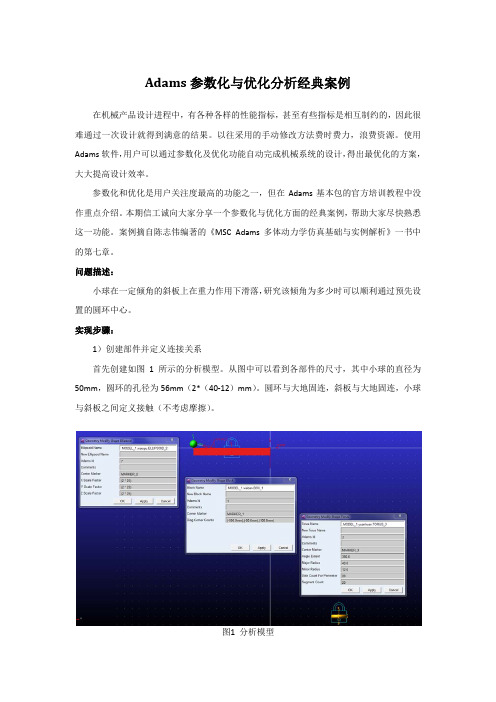
实现步骤:1)创建部件并定义连接关系首先创建如图1所示的分析模型。
从图中可以看到各部件的尺寸,其中小球的直径为50mm,圆环的孔径为56mm(2*(40-12)mm)。
圆环与大地固连,斜板与大地固连,小球与斜板之间定义接触(不考虑摩擦)。
图1 分析模型2)参数化模型模型参数化分为两步,第一步定义设计变量,第二步将现有模型数据用设计变量替换,实现模型参数化。
本例需要定义一个独立变量(斜板角度)和两个非独立变量(小球X坐标和Y坐标)。
斜板角度参数化如图2所示,小球坐标参数化如图3所示。
图2 斜板角度参数化图3 小球坐标参数化参数化后将斜板角度初始值改为-10,检查修改后的模型显示是否正确。
如果所有的参数定义都正确的话,修改后的模型显示效果会如图4所示。
图4 修改斜板初始角度3)定义优化目标我们的设计目标是让小球穿过圆环,但这不是软件能读懂的机器语言。
这里我们可以建立一个小球中心Marker点和圆环中心Marker的“点的点对点测量”,以测量结果的最小值作为优化目标,当测量结果的最小值小于3mm(圆环孔半径与小球半径之差)即代表小球穿过圆环。
建立好测量后运行一次2秒200步的仿真,并查看测量结果。
Adams应用教程第0章ADAMS参数化建模与优化设计说明

第10章 ADAMS参数化建模及优化设计本章将通过一个具体的工程实例,介绍ADAMS/View的参数化建模以及ADAMS/View提供的3种类型的参数化分析方法:设计研究(Design study)、试验设计 (Design of Experiments, DOE)和优化分析(Optimization)。
其中DOE是通过ADAMS/Insight来完成,设计研究和优化分析在ADAMS/View中完成。
通过本章学习,可以初步了解ADAMS参数化建模和优化的功能。
10.1 ADAMS参数化建模简介ADAMS提供了强大的参数化建模功能。
在建立模型时,根据分析需要,确定相关的关键变量,并将这些关键变量设置为可以改变的设计变量。
在分析时,只需要改变这些设计变量值的大小,虚拟样机模型自动得到更新。
如果,需要仿真根据事先确定好的参数进行,可以由程序预先设置好一系列可变的参数,ADAMS自动进行系列仿真,以便于观察不同参数值下样机性能的变化。
进行参数化建模时,确定好影响样机性能的关键输入值后,ADAMS/View提供了4种参数化的方法:(1)参数化点坐标在建模过程中,点坐标用于几何形体、约束点位置和驱动的位置。
点坐标参数化时,修改点坐标值,与参数化点相关联的对象都得以自动修改。
(2)使用设计变量通过使用设计变量,可以方便的修改模型中的已被设置为设计变量的对象。
例如,我们可以将连杆的长度或弹簧的刚度设置为设计变量。
当设计变量的参数值发生改变时,与设计变量相关联的对象的属性也得到更新。
(3)参数化运动方式通过参数化运动方式,可以方便的指定模型的运动方式和轨迹。
(4)使用参数表达式使用参数表达式是模型参数化的最基本的一种参数化途径。
当以上三种方法不能表达对象间的复杂关系时,可以通过参数表达式来进行参数化。
参数化的模型可以使用户方便的修改模型而不用考虑模型部之间的关联变动,而且可以达到对模型优化的目的。
参数化机制是ADAMS中重要的机制。
ADAMS VIEW 参数化和优化设计实例详解

ADAMS/VIEW 参数化和优化设计实例详解本例通过小球滑落斜板模型,着重详细说明参数化和优化设计的过程.第一步,启动adams/view(2014版),设置工作路径,设置名称为incline。
名称存储路径第二部,为满足模型空间,设置工作网格如图参数.修改尺寸第三部创建斜板。
点击Bodies选项卡,选择BOX,然后建模区点击鼠标右键,分别设置两个点,坐标为(0,0,0)和(—500,-50,0),创建完模型,然后右键Rename,修改名称为xieban.BOX右键输入坐标,创建点rename输入xieban第四部创建小球.点击Bodies选项卡,选择Sphere,然后建模区点击鼠标右键,分别设置两个点,球心坐标为(-500,50,0)和半径坐标(—450,50,0),创建完模型,然后右键Rename,修改名称为xiaoqiu。
输入两点Rename,及创建效果第五部创建圆环.点击Bodies选项卡,选择Torus,然后建模区点击鼠标右键,分别设置两个点,圆环中心坐标为(450,—1000,0)和大径坐标(500,—1000,0),创建完模型,然后右键Rename,修改名称为yuanhuan。
完成后效果如下图:第六部修改小球尺寸及位置.首先修改小球半径为25mm,在小球上右键,选择球体,点击Modify,然后设置如下图;然后修改小球位置,将Y坐标移到25mm处,选择Marker_2点,右键点击Modify,然后设置坐标位置如下图.右键编辑球半径修改半径为25改后效果修改球的位置设置球坐标完成修改后效果第七部修改圆环尺寸及位置。
将圆环绕X轴旋转90度,选择Marker_3点,右键点击Modify,然后设置坐标位置如下图。
修改圆环尺寸,大径为40mm,截面圆环半径为12mm,右键,选择圆环体,点击Modify ,然后设置如下图。
至此,模型建立完毕.修改圆环位置位置坐标修改圆环尺寸圆环尺寸设置第八步,创建模型连接关系,斜板与大地间定义固定副,附着点为斜板中心;圆环与大地定义固定副,附着点为圆环中心;小球与斜板间定义接触,单击Forces块中的Contact,打开接触定义对话框,按图设置。
adams参数化建模
应用不关 应用不关 闭对话框 应用且关 应用且关 闭对话框
建立控制点
左键双击 可对点进 行编辑
对控制点坐标进行参数化
输入方程
右键单击
选择设计变量 和控制点坐标
建立转向机构模型
转向梯形参数化
L=(lw + wb / 2)
建立约束
固定副 转动副
移动副 与Al点关联 点关联 球铰
谢 谢!
bwrw0?adams建立设计变量初值名称单位应用不关闭对话框不关闭对话框应用且关闭对话框关闭对话框建立控制点左键双击可对点进行编辑左键双击可对点进行编辑对控制点坐标进行参数化输入方程选择设计变量和控制点坐标选择设计变量和控制点坐标右键单击建立转向机构模型转向梯形参数化llwwb2建立约束固定副转动副固定副转动副移动副与移动副与al点关联球铰施加驱动仿真仿真时间仿真步数设置仿真步长或仿真步数运行时函数的设置marker12marker19marker13alfatandymarker12marker19dxmarker12marker19betaatandymarker21marker13dxmarker21marker13acmangatan2tan
ADAMS参数化建模
齿条驱动断开式转向梯形机构 的参数化设计
wb
Al Dl Cl
α0
l1
Ar
l3 l2
Bl KyΒιβλιοθήκη BrCrDr
wr lw
lw
控制点: 控制点: Al Ar Bl Br Cl Cr Dl Dr 设计变量: 设计变量:l1 l2 l3 lw
y K wb wr α 0
ADAMS
ADAMS-建立设计变量
施加驱动
仿真
ADAMS凸轮机构的参数化及其优化
2.6凸轮机构的参数化设计及轮廓曲线优化此节以盘形凸轮为例进行介绍:传统的凸轮设计方法有图解法和解析法两种。
图解法简单,直观,但设计的精度有限;解析法的设计精度较高,但计算量比较大,往往需要编写复杂的计算机程序。
由于盘形凸轮比较简单,可直接用ADAMS/VIEW 作为软件平台来进行凸轮的参数化设计,利用其强大的仿真分析能力进行从动件的运动学分析,根据输出速度和加速度曲线的仿真结果对其运动规律进行修正,从而实现凸轮轮廓曲线的优化。
已知一尖端偏置移动从动件盘形凸轮机构。
已知凸轮的基圆半径等于100mm,偏距=20mm,凸轮沿逆时针方向以匀角速度=30d/s转动,从动件的位移运动规律方程如下:按等速速规律运动时的推程为:s=h-:180 「0 _ _180(7)按简谐规律运动时的回程为:.s=h-〉2 ‘1 cos[二一:一180 (扌「180)]? 180 _ - 360(8)对上述实例用ADAMS/View模块进行虚拟样机的建模,建模过程如下:1. 启动ADAMS/View。
2. 创建凸轮机构模型名称:tulunjigouca nshuhua3. 设置工作环境:保持系统默认单位值,设置工作网格,将size的x值设置为400,y值设置为400,将Spaci ng中的x、y值均设置为10。
设置工作图标,将New Size设置为20。
然后按F4,打开光标位置显示。
4. 创建尖顶从动件:(1)单击 ',设置参数如图2-113所示,点击(0, 0, 0)和(0, 20,0)两点。
将所创建的圆锥体重命名为follower。
(2)单击:」、,设置参数如图2-114所示,点击follower,再点击(0, 20,0),然后向上拖动光标,然后点击工作区域。
(3)单击也,在follower的尖端处创建一个add to part的标记点MARKER 。
,将follower 的尖端移动到(20, 98, 0)处。
Adams参数化建模案例
C(0, L2bc L2ab ), D(0,Lad),E(-25, 25 L2bc L2ab ,-25)
3.6 机构的参数化建模与设计
实例10: 机构的参数化建模
3.6 机构的参数化建模与设计
实例12: 机构的装配法建模
4. 创建运动副
➢ 转动副:Joint_O(Part1,ground), Joint_A ( part1 , part2), Joint_D(part4,ground), Joint_F(part5,ground)
➢ 2构件转动副:Joint_B(part2,part3, part2上端点, part3左端点), Joint_C(part4, part3, part4左端点, Part3右端点),Joint_E(part5,part3,part5下端点, part3上端点)
Marker3,Cam ➢ 创建凸轮几何体:ExtrusionAdd to part,
Curve, About Center, L10单击cam,curve ➢ 删除凸轮板 ➢ 删除运动MOTION_T ➢ 创建凸轮副:Point-CurveMarker3, Curve
3.6t_Op(part1,ground)
3.6 机构的参数化建模与设计
实例12: 机构的装配法建模
5. 装配模型
➢ Simulation ControlDetail Siminitial conditionSave Model(six_bar_assemble)
➢ 删除固连副:Joint_Op ➢ 施加运动:Joint_O(36°/s)
adams参数化设计步骤
Adams中可以进行参数化设计,便于实时修改各参数进行分析。
现进行五杆机构的分析。
点击“设计探索->设计变量”,建立设计变量。
分别建立”DV_AB”、“DV_BE”、“DV_ACX”等表示五杆的杆长,并设置初值,五杆的最底端要使用正解求解。
点击“工具->表格编辑器”,点击左下方的“点”,“创建”设计点。
将五杆的端点用设计变量表示。
随后用连杆连接设计点。
改变设计变量时杆长也会改变。
为了探究最优杆长,需要用到“设计探索->设计评价”。
点击“建立新的设计目标函数”,选择“测量”,最后选择力矩2.
创建约束条件就很麻烦。
要约束五杆一方向的最大差值大于200mm,先建立设计变量“H”,用已有的设计变量表示,随后选择“设计探索->测量->建立新的测量函数”。
获取H的数据。
因为其要大于200mm,而测量函数最后作为约束时默认小于0,所以设置为-H+200.
随后点击“设计评价->创建约束条件函数”,设置如下:
随后点击“设计评价->设计评价工具”,设置如下:
点击开始即开始优化设计。
2018-11-29。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
选择“name_and_position”,弹
出创建刚体对话框,将部件名字
改为.model_1.uca,其余缺省,
点击“OK”
实体名称的创建
Command Navigator→ geometry → create →
shape,双击cylinder,创建
几何实体,在名字框可以改动 几何实体的名称 (一定要将 几何实体创建到它属于的部 件)。
Variable、Real,则创建设计变量.model_1.DV_1,
如图。
同样根据lca_knuckle、tie_knuckle创建设计 变量DV_2、DV_3。
设计变量的修改 在菜单Build中选择Design
Variable、Modify,在对话框,
Units中选择length,Value
test_plane
743.0, 1442.0, 207.0
测试台与转向节铰链联接点
参数化点的创建
通过主工具箱中点快
捷图标创建
通过“Tool”菜单中
的”Command Navigator”
来创建(本例以第二种方 式创建)
菜单命令。随后出现Command Navigator对话框,
找到其中的point,点击前面“+”号展开,在展开后的
万向节的创建 进入Command Navigator对话框,展开constraint、
joint,双击hook。弹出创建对话框,在下拉菜单中选择
Position By Using Markers,通过Marker来为铰定向。 I Marker Name编辑框中右击选择Marker、Create, 弹出创建Marker对话框,先创建属于地面的I Marker,Z 轴为水平方向.改名为“model_1.tierod.MARKER41”,在
Location Frustum1
Frustum2
Along Axis„ wheel_center
wheel_center
长度 -30
-30
顶端半径 270
270
底端半径 300
300
wheel_outer
wheel_inner
模型示意图
约束的创建
进入Command Navigator对话框,展开 constraint、joint,双击spherical。 在弹出对话框的I、J part Name编辑框中分别 输入uca和knuckle,在“location”编辑框中选择 点uca_knuckle。点击“ok”完成创建。
所有的变量;Filters项,显示表格编辑器显示所 有与变量变化有关的特性,包括:Range、 Allowed values和Delta Type等。通过表格改变 设计变量的有关特性。
测量函数的定义 前束角测量函数:菜单Build→ Measure → Function → New,在对话框Measure Name中输 入.model_1.M_Toe_ Angle。选择单位为角度。上部对
外倾角测量,测量名为.model_1.M_Camber_Angle
函数定义为.model_1.M_Camber_Angle
“ATAN2(DZ(.model_1.knuckle.MARKER_18, .model_1.
Tierod_ knuckle ,tierod_middle 20 knuckle_center, uca_knuckle knuckle_center, lca_ knuckle knuckle_center, tierod_knuckle knuckle_center, uca_knuckle 70 70
创建驱动
在Command Navigator→ constraint →
create → joint,双击motion_ generator。
在Motion name改变motion的名字。在函数类 型下拉菜单中选择Function,在编辑框中输入“-
100*time+100”。在接下来的两个下拉菜单中分
390.0,1311.0,471.0
686.0, 1442.0, 507.0 743.0, 1442.0, 507.0 813.0, 1442.0, 507.0 673.0, 1442.0, 507.0
定位万向节(车体上)Z方向点
转向节中心点 轮中心点 定义轮几何实体辅助点 定义轮几何实体辅助点
14
(表示创建的Marker“Z”轴方向为点uca
_knuckle指向点uca_f_center方向,这指定了所 创建圆柱体的轴线方向)
实体参数的设置
返回创建圆柱体的对话框,在长度对话框栏右击
鼠标,选择“Parameterize”->“Expression
build”,下拉菜单选择“Modeling Function”,选择
5.8 ADAMS参数化建模及优化设计实例
参数化的四种方法:
参数化点坐标
使用设计变量
参数化运动方式 使用参数表达式 以双摆臂独立前悬架运动学模型为例
以参数化点坐标的方式进行参数化建模
双摆臂独立前悬架拓扑结构
主要部件:
上摆臂(UCA) 下摆臂(LCA)
转向节(Knuckle)
横向拉杆(Tie Rod)
“DM”,用来计算两点之间距离。点击按钮Assist, 弹出对话框,在object1编辑框中输入第一个点 uca_knuckle,在object2编辑框中输入uca_f_center 见图
关闭对话框后回到创建几何实体对话框,在
Radius编辑栏中输入15,点击“OK”,则几何体创 建成功
模型部件列表
说
明
下摆臂后端与车体铰链联接点 下摆臂前端与车体铰链联接点 转向节与下摆臂铰链联接点 上摆臂后端与车体铰链联接点 上摆臂前端与车体铰链联接点 转向节与上摆臂铰链联接点 左横向拉杆与车体铰链联接点 转向节与横向拉杆铰链联接点
9
10 11 12 13
hookref
knuckle_center wheel_center wheel_outer wheel_inner
Range中选择+/- Delta
Relative to Value,在-、+ Delta编辑框中分别输入-5.0, 5.0。选择Apply键确认,并继续 修改设计变量,所有完成后点击
OK按钮确认。
使用表格编辑器创建和修改设计变量。选择
Tools菜单的Table Editor命令,显示如图表格编
辑器可通过编辑器窗口的底部Variable项,显示
坐标值(X, Y, Z)
307.0 ,1560.0, 383.0 307.0, 1285.0, 388.0 686.0, 1414.0, 364.0 384.0, 1564.0, 650.0 384.0, 1330.0, 708.0 593.0, 1448.0, 686.0 377.0, 1311.0, 471.0 703.0, 1305.0, 459.0
Location中选择点tierod_middle,菜单中选择“Along
Axis Orientation”,选择点hookref。点击“OK”。
建横向拉杆上的J Marker,其Z轴为横向拉杆 的轴线方向。Marker对话框中改名为
“.model_1.tierod.MARKER_42”,在Location编
部件 Location LCA Cylinder1 Cylinder2 tierod test_pla ne Knuckle Cylinder1 Cylinder1 Cylinder1 Cylinder2 Cylinder3 Cylinder4 Wheel Cylinder1 Cylinder2
Center Marker Along Axis„ Lca_ f_ center lca_r_center tierod_middle wheel_center Uca_ knuckle Lca _ knuckle tierod_knuckle uca_knuckle wheel_inner wheel_outer
在图形区,将鼠标移至上摆臂与转向节铰接处,
单击右键,在弹出菜单中选择Point:uca_knuckle, 在其子菜单中选择Modify。弹出参数化点表,在表中 找到点uca_ knuckle,将光标移至其z坐标处,在对 话框上部的编辑框中出现z值“686”。在该编辑框中
右击鼠标,依次选择Parameterize、Create Design
在弹出对话框中点
击左下角按钮
Setting,选择
Error→ ok
参数化点的确定
能为模型对象位置和方向定位
根据点能创建模型可视化几何实体
模型的参数化表
序号
1 2 3 4 5 6 7 8
名称
lca_r_center lca_f_center lca_knuckle uca_r_center uca_f_center uca_knuckle tierod_middle tierod_knuckle
列表中双击create,这时系统弹出创建点对话框
重复上述步骤创建剩下的点,或者点击Apply,直
接改动名字,输入坐标。创建完成后,界面上会出现图 标,这表示创建出的点
部件模型的创建
创建空部件
创建几何实体
空部件的创建(以上摆臂为例)
进入“Command Navigator”
对话框,依次展开“part”、 “create”和“rigid_body”,
பைடு நூலகம்
长度(L) DM(object1, object2) lca_knuckle , Lca_ knuckle , lca_f_center lca_r_center
半径 15 15 15 15 120 15 15 15 15 300 300