基于可视化技术设计实现雷达数据处理软件平台
大数据平台下的可视化分析系统设计与实现

大数据平台下的可视化分析系统设计与实现随着大数据时代的到来,企业和组织面临着海量数据的挑战和机遇。
为了从海量数据中获取有价值的信息,大数据平台下的可视化分析系统成为必不可少的工具。
本文将介绍大数据平台下的可视化分析系统的设计与实现。
一、设计目标大数据平台下的可视化分析系统的设计目标是通过可视化的方式帮助用户快速、直观地理解和分析海量数据,从而支持决策制定和业务优化。
具体地,设计目标包括:1. 提供直观的数据可视化界面,以便用户能够轻松地浏览和理解数据。
2. 支持多样化的数据展示方式,如表格、图表、地图等,以满足不同用户的需求。
3. 提供灵活的数据筛选和过滤功能,以帮助用户在海量数据中找到感兴趣的信息。
4. 支持交互式数据分析和探索,以便用户能够深入挖掘数据中的隐藏模式和规律。
5. 支持数据的实时更新和动态展示,以及数据的历史记录和比较分析。
二、系统架构大数据平台下的可视化分析系统的架构应该具备高性能、可扩展和易用性等特点。
一种常见的系统架构包括以下几个关键组件:1. 数据采集与存储:负责从各种数据源中采集、清洗和存储数据。
这一部分可以利用大数据平台的技术,如Hadoop、Spark等。
2. 数据处理与分析:负责对采集到的数据进行预处理、分析和建模。
这一部分需要结合统计分析、机器学习和人工智能等技术,提取数据中的有用信息。
3. 可视化界面:负责将数据处理和分析的结果以可视化的方式呈现给用户。
这一部分可以利用Web技术和数据可视化工具,如D3.js、Tableau等。
4. 用户交互与操作:负责接收用户的请求和操作,并与后台系统进行交互。
这一部分需要提供直观友好的用户界面和交互方式,如拖拽、下拉框、点击等。
5. 安全与权限管理:负责保障系统的安全性和数据的隐私性,同时管理用户的权限和角色。
这一部分需要结合身份认证和访问控制等技术,确保系统的可靠性。
三、实现过程大数据平台下的可视化分析系统的实现过程包括以下几个步骤:1. 数据采集与存储:首先,确定需要采集和存储的数据源,并设计相应的数据模型和表结构。
基于MATLAB的雷达探测数据处理图形界面设计
图1 机组负荷与节电率曲线图222.97元/MW·h(不含税),机组每年因电泵改造可增加经济收益175.46万元。
从降低供电煤耗的角度分析,参照改造前后的锅炉效率、汽机热耗率、厂用电率等数据来评估其节省煤耗。
在50%负荷工况下,电泵变频改造节省煤耗3.6g/kW·h;75%负荷工况下,电泵变频改造节省煤耗1.95g/kW·h;100%负荷工况下,电泵变频×由于雷达设备与GPS可能会出现时间上的偏差,因速度、角度对时间加修正的时间差值进行插值。
具体代所示,这样可以确保雷达与GPS图1 真值计算图2 时间修正插值2.2 数据剔除及精度计算 GPS数据和雷达数据在经过速度、距离、角度的插值计算后,想要精确计算各数据的误差,应该先将误差较大的错误点位数据排除掉。
根据规定的时间、速度、角度以及距离门限进行数据剔除,剔除原则为要求剔除剩余的数据在时间、距离、速度、角度上同时满足小于其3倍门限,将满足所有条件的数据按距离、速度、角度分别进行表格输出。
接下来就是借助GPS探测数据对雷达数据进行误差计算,使用均方根误差计算方法分别对距离、速度及方位角进行计算,具体算法为公式(4)~(6)。
根据需求另外计算误差还使用滑窗算法,设置窗口为变量,可以输入改变来进行控制窗口的大小。
(4)(5)(6)GUI界面设计图3 主界面点击Ⅰ型,进入Ⅰ型实验数据处理的计算功能界面4),界面中的输入框包含雷达架设点位的经纬度以及海拔高度,用于去除错误点位的时间、距离、角度门限,可以根据测量目标在大量GPS数据中进行筛选的距离范围,以及如果存在时间偏差的具体时间偏差值设置。
设置了三个用于计算的按钮,点击GPS进入到文件选择窗口,选择需要处理的GPS解算完成后会输出一个命名为GPS的data然后进行点击筛选探测值,选择刚才计算完成的文件以及雷达探测值文件,计算完成后会输出一个筛选图5 结果输出当点击Ⅱ型,由于Ⅱ型数中要求在计算精度时加入滑窗计算的方法,因此在此设计了包含文字介绍以及滑窗算法和均方根算法的两个绿色可点击的按键,两个按钮分别代表了两种雷达数据误差计算方法(图所需要算法的按钮进入选择探测的目标界面,如图图6 Ⅱ型主界面图7 探测目标选择界面根据数据的对象进行选择按键进入计算界面同一类型下所有探测目标计算界面相同,但回调程序不图4 Ⅰ型计算界面图8 Ⅱ型计算界面图9 结果输出用户图形界面经过上述测试没有问题后,进入该界面还是要运行一个M文件,而且仍需要借助MATLAB境运行才能使用,因此尽管封装完毕,仍然需要用户安装、打开MATLAB才能进行运行,也仍然不方便,毕竟不是每位用户都愿意安装及打开MATLAB。
毕业设计之倒车雷达
随着汽车的迅速增加,停车难已经是不争的事实,狭小的停车场地常常令有车一族无所适从,稍不慎,则闯祸,烦事又烦人。虽然每辆车都有后视镜,但不可避免的都存在一个后视盲区。汽车倒车防撞预警系统即俗称的倒车雷达,是汽车泊车时的辅助装置。在汽车倒车时,倒车雷达采用超声波测距原理探测汽车尾部离障碍物的距离,当汽车尾部离障碍物的距离达到探测范围时,倒车雷达通过数码管实时动态显示距离。当汽车尾部离障碍物的距离达到设定的安全警告值时,倒车雷达发出报警声,以警示驾驶员,辅助驾驶员安全倒车。
近两年来,倒车雷达成了商家的电子新宠,众多生产防盗器的厂家纷纷涉足倒车雷达。随着信息化、智能化、网络化的发展,嵌入式系统技术获得广阔的发展空间,工业控制领域也进行着一场巨大的变革,以32位高端处理器为平台的实时嵌入式软硬件技术将应用在工业控制的各个角落。嵌入控制器因其体积小、可靠性高、功能强、灵活方便等许多优点,其应用已深入到工业、农业、教育、国防、科研以及日常生活等各个领域,对各行各业的技术改造、产品更新换代、加速自动化进程、提高生产率等方面起到了极其重要的推动作用。
该系统能够在汽车以较低的速度进行倒车的过程中,识别出车后部的障碍物,并能够测量车与障碍物之间的距离,在车辆与障碍物发生碰撞前,发出声光报警。在车辆上安装一个对障碍物进行监测预警的系统,就能用声音和数码管实时动态显示的距离告知驾驶员周围障碍物的情况,解除驾驶员泊车和启动车辆时前后、左右探视所引起的困扰。同时帮助驾驶员扫除视野的死角和视线模糊的缺陷,驾驶员只需坐在驾驶室就能观察到车前车后的详细情况,做到心中有数,极大的提高了泊车和倒车时的安全和效率。也能让驾驶员在危险时刻到来前及时采取有效措施,减少事故发生,保障人身和财产安全。
摘要
倒车雷达是汽车泊车或者倒车时的安全辅助装置。该系统能够在汽车低速倒车的过程中,识别出车体后部的障碍物,并能够测量汽车与障碍物之间的距离。在车辆与障碍物发生碰撞之前,发出语音警报,提醒司机刹车。
雷达电磁波三维探测范围可视化仿真

在实际的战场环境中,电磁环境非常复杂,除了地形地质、实时变化大气环境,雷达探测范围还与目标散射截面积有关。构建真正可以提供辅助决策功能的虚拟战场平台,还需进行大量的研究与探索,将电磁环境和地理环境充分融合。
图5是对圆柱体数据提取等值面的效果,实现了雷达探测范围的可视化。但是从中也能明显看出从圆柱体数据直接提取等值面的缺陷,圆柱体数据场数据密度不一致,内密外疏,。这样会造成2个问题,一是在探测范围的外边界数据不光滑,误差较大,为了减小误差,需要更多的剖分面,体数据量急剧增加,增大计算负荷;二是探测范围内部数据场密度过大,数据冗余,计算出的等值面片比计算机像素还要小,面片退化为点,浪费计算资源。2.2 同心圆柱环拼接 为了圆柱体数据场密度不一致问题,提出了一种同心圆柱环拼接算法。首先将圆柱体数据沿距离方向等分为圆柱环,然后从内向外依次填充数据,使得外环的数据密度不小于内环的数据密度,最后将各圆柱体环数据可视化拼接,即可实现对探测范围的可视化。本算法的关键是利用APM模型的递推算法,将初始场外推,减少递推步数,。利用已经算出a点和b点的电场值,插值计算出中点c的电场值,把c的电场值作为初始值带入APM模型求解后面的数据。这样就避免了上面提出的2个问题。若a与b之间的地形变化剧烈,这种方法也可能带来较大的误差。这时,应以雷达原点为初始场,计算雷达至c点的电场强度。在工程中,充分考虑雷达周围的地形情况可避免大量的重复运算,如若雷达至a,b和c点的地形一样,或误差很小,那么可以使用任意一点的电场值代替其他点的电场值。
3 结果与分析 设发射频率为1 GHz,天线高度为25 m,采用水平极化方式,地面绝对湿度为0.1 g/m3,地表空气温度为15℃,地面类型为中等干燥地面。利用VTK软件包和同心圆柱环拼接方法,雷达探测范围仿真的结果。若加入电子干扰,设雷达的半功率波束宽度为30℃,探测范围仿真结果。比较图8、图9和图5,利用同心圆柱拼接算法,探测边界光滑性得到明显的改善。绘制完毕后,用鼠标旋转可以改变视角,速率可满足实时性要求。
激光雷达数据处理与地形图制作工具软件比较
激光雷达数据处理与地形图制作工具软件比较激光雷达(Lidar)是一种能够高效获取地球表面三维信息的技术。
它结合了激光技术和雷达原理,通过向地面发送激光束并测量反射返回时间来获取地形表面的点云数据。
这种数据可以用来生成高精度的地形图,用于各种应用领域,如地质勘探、城市规划、环境监测等。
为了对激光雷达数据进行处理和地形图的制作,科研工作者和工程师们开发了许多不同的软件工具。
本文将对几种常用的激光雷达数据处理与地形图制作工具软件进行比较。
首先,我们来介绍一种常用的激光雷达数据处理工具,即LASTools。
LASTools是一个开源的软件套件,提供了一系列用于激光雷达数据处理的工具。
它支持常见的激光雷达数据格式,如LAS和LAZ,并提供了各种功能,包括数据过滤、分类、点云修复、DEM生成等。
LASTools具有用户友好的界面和丰富的文档,使得用户可以轻松地进行数据处理和图形化展示。
另一个值得一提的激光雷达数据处理工具是FUSION。
FUSION是一个功能强大且广泛使用的软件包,特别适用于森林资源管理和生态学研究领域。
FUSION与LASTools类似,支持多种激光雷达数据格式,并提供了许多数据处理和分析功能。
它的主要特点之一是可以进行全球定位系统(GPS)和惯性测量单元(IMU)数据的处理和点云配准,这对于精确地获取地形数据非常重要。
除了以上两种工具之外,还有一种受欢迎的激光雷达数据处理和地形图制作工具是CloudCompare。
与LASTools和FUSION不同,CloudCompare是一个开源的三维点云处理软件,支持多种点云数据格式。
它具有强大的点云处理和分析功能,包括数据滤波、配准、重建等。
CloudCompare还支持多种数据可视化和导出方式,使用户能够更方便地进行数据展示和分析。
除了上述的激光雷达数据处理工具之外,还有一些专门用于地形图制作的软件。
其中一种是Global Mapper,这是一款功能强大的地理信息系统(GIS)软件,广泛用于地理数据的处理和分析。
机载激光雷达数据后处理软件(LiDAR_Suite)简介
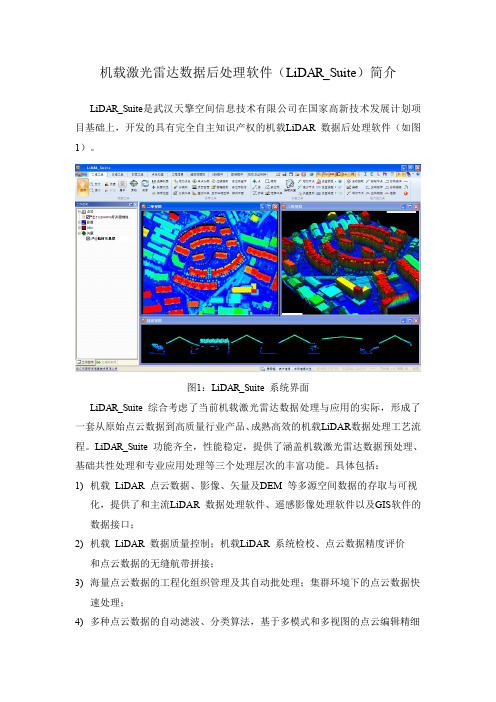
机载激光雷达数据后处理软件(LiDAR_Suite)简介LiDAR_Suite是武汉天擎空间信息技术有限公司在国家高新技术发展计划项目基础上,开发的具有完全自主知识产权的机载LiDAR 数据后处理软件(如图1)。
图1:LiDAR_Suite 系统界面LiDAR_Suite 综合考虑了当前机载激光雷达数据处理与应用的实际,形成了一套从原始点云数据到高质量行业产品、成熟高效的机载LiDAR数据处理工艺流程。
LiDAR_Suite 功能齐全,性能稳定,提供了涵盖机载激光雷达数据预处理、基础共性处理和专业应用处理等三个处理层次的丰富功能。
具体包括:1)机载LiDAR 点云数据、影像、矢量及DEM 等多源空间数据的存取与可视化,提供了和主流LiDAR 数据处理软件、遥感影像处理软件以及GIS软件的数据接口;2)机载LiDAR 数据质量控制;机载LiDAR 系统检校、点云数据精度评价和点云数据的无缝航带拼接;3)海量点云数据的工程化组织管理及其自动批处理;集群环境下的点云数据快速处理;4)多种点云数据的自动滤波、分类算法,基于多模式和多视图的点云编辑精细分类,多模式和可视化的分类精度评价;5)基于机载LiDAR 点云的高质量数字高程模型和等高线生产;6)面向机载LiDAR 同机航空数码相机的整区域快速正射影像生产;机载LiDAR点云与非同机遥感影像的配准;7)电力行业应用:电力线提取与建模、电力设施周边地物要素采集、危险点间距量测等;8)数字城市应用:独立的子模块Building Modeler,实现城市建筑物三维模型的自动、半自动建立。
LiDAR_Suite采用了当前机载LiDAR最新数据处理技术,采用了模块化设计思想以及插件集成技术,在可视化、人机交互、易操作性、处理精度与效率等方面与现有商业化的主流机载激光雷达数据处理软件相比均具有一定的技术优势,并提供了灵活方便的、面向行业的二次开发功能。
LiDAR_Suite兼顾了先进算法自动化处理和人机交互的作用,使系统更具实用性;面向专业应用提供了测绘生产、数字城市建模、电力行业应用等功能。
基于VC++6.0的卷云激光雷达信号定标可视化软件设计与实现
中图分类号 :F 9 . ;4 75 T 3 19 P 0 .
文献标识码 : A
Th sg n mp e e t to fViu l a i n S fwa e f r Cir s e De in a d I lm n a in o s a i to o z t r o r u
陶 晨 , 淼 , 聂 李成军 , 陶宗明
( . 徽省 长江计量 所 , 1安 安徽 合肥 20 3 ;.陆军军官学院基础部物理教研室 , 3 0 12 安徽 合 肥 20 3 ) 3 0 1
摘 要 : 光 雷 达信 号 定标 是 其数 据 处 理 的 基 本 组 成 部 分 。根 据 卷 云 激 光 雷 达 数 据 的特 点 与 定 标 的 需要 , 于 激 基
V C++6 0设计 了定标可视化软件。该软件能 够实现 数据读取 、 . 计算 、 保存 、 图、 绘 定标参数修 改等功 能。经 过测试 , 该软件 能较好 地完成三波长卷云激光 雷达信号定标可视化的数据处理 工作 。它使 用方便 、 可靠性好 、
扩展性强 。
关键词 : 定标 ; 光 雷 达 ; 激 可视 化
第3 O卷
第 2期
江
西
科
学
V0 . 0 No 2 13 .
Ap . 01 r2 2
21 0 2年 4 月
JANGXI S ENCE I CI
文 章 编 号 :0 1 69 2 1 )2—0 1 0 10 —37 ( 02 0 2 9— 4
基于 V C+ +6 0的卷 云 激 光 雷 达 . 信 号 定 标 可 视 化 软件 设 计 与 实 现
收稿 日期 :0 2— 3—0 ; 订 日期 :0 2— 4— 6 21 0 5修 21 0 0
雷达模拟器中可视化仿真技术的实现
达数据处理算法 的工作效果 。要 实现这 样的雷 达仿真模拟
l 引言
雷达模拟器可完整地仿真雷达的各项性 能 , 既方便研究
人员操作 , 又能 比较逼 真 的给 出雷 达 的模拟 数据 和 跟踪航
器系统需要模拟雷达工作过程 、 目标 运动状态和环境实 时状 态并对真实量测数据与雷 达数据 处理算 法的工作效 果进行
实时 、 直观 的动态 显示 。因此需 要实 现的功 能包括 : 对想 ①
迹, 达到实时仿 真雷 达 的主要功 能和 工作过程 , 以及 对 目标 的探测性能 , 为雷达 系统设计提供仿真 雷达情报和为雷达数 据处理算法研究人员提供仿真数 据支持和评估环境 , 因此其 主要作用是充 当雷达 系统设计 和雷达 数据处 理算法 调试和 验证 的试验平台 , 缩短 了研制周期 , 节约 了费用 。近年 来 , 由
仿真和雷达波位扫描等功能 , 能直观、 准确 、 动态地表现雷达战场环境。仿真实验表 明, 雷达模拟 器实现 了目标运动和雷达 数据处理算法 的工作效果 , 为设计新型雷达提供可靠参考。 关键词 : 仿真模拟 ; 雷达模拟器 ; 地理信息
中图 分 类号 :3 19 T 9 . 文 献标 识 码 : A
第2 第 期 7 卷 4
文章编号 : 2 1 )4 0 2 0 0
计 算
机
仿
真
21年4 0 0 月
雷 达 模 拟 器 中 可 视 化 仿 真 技 术 的 实 现
陈丽平 , 杨 峰, 梁 彦
( 西北工业大学 自动化学院 , 陕西 西安 70 7 ) 10 2
p o r mmi g tc n q e i it g ae b an t es e i cf n t n u h a o n ain,d s ly a d c n r l f at — rga n e h i s n e t d t o ti p cf u ci ss c sf u d t u r o h i o o ip a n o t t e oob l
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Open Access
1. 引言
所谓数据可视化,是指将大型数据集中的数据以图形图像等形式表示,利用数据分析和开发工具发 现其中未知信息的过程。数据可视化利用人类感觉系统的广阔带宽,对错综复杂的过程,涉及不同学科 领域的数据集,以及来源多样的大型抽象数据集进行操纵和解释。数据可视化技术是数据可视化的实现 技术,它主要借助于图形化手段,来清晰、有效地传达与沟通信息,在人们目前的研究、教学和开发等 领域有着广泛的应用。
Received: Dec. 31st, 2019; accepted: Jan. 14th, 2020; published: Jan. 21st, 2020
Abstract
In order to improve the efficiency of radar data processing, a software platform for radar data processing is designed and implemented based on visualization technology. The design of two core components of the platform, namely, the waveform chart and the text window, is emphasized. The waveform chart is used for the observation of data as a whole as well as in detail. The operations imposed on the waveform curve include panning freely, scaling horizontally or vertically, viewing data point, etc. And the waveform chart data can be dynamically selected based on a proposed data selection algorithm. An alternate visualization method of viewing and processing data lies in the design of the text window where a shortcut menu is utilized to enhance the interactivity of the human-computer operation. A fast and efficient drawing algorithm is adopted to improve the drawing speeds of both the waveform chart and the text window. The application results of data processing for a certain type of monopulse radar show that using this software platform improves the data processing efficiency.
DOI: 10.12677/sea.2020.91004
23
软件工程与应用
张志民 等
作;文本窗是一个以文本形式显示、编辑和处理数据的窗口,在这个窗口中,用户借助于快捷菜单操纵 数据。为进一步提高处理速度,波形图和文本窗都采用快速显示算法。在可视化显示和处理数据方面, 波形图和文本窗各有侧重,各有所长,两者结合起来使用,可以充分发挥各自优势,提高数据处理速度 [3] [4]。
HICON
hIcon;
HCURSOR hCursor;
HBRUSH hbrBackground;
LPCTSTR lpszMenuName;
LPCTSTR lpszClassName;
HICON
hIconSm;
} WNDCLASSEX, *PWNDCLASSEX;
下面分别介绍 WNDCLASSEX 结构中各个字段的含义。
2. 可视化雷达数据处理软件平台设计
基于可视化技术设计的雷达数据处理软件平台架构如图 1 所示,可以看出平台基于 Visual C++ 2010 集成环境开发,包含波形图和文本窗两个核心构件。波形图是一个以图形方式显示数据的窗口,在这个 窗口中,用户可以对图形进行自由平移、水平缩放、竖直缩放、图形数据动态选择、图形数据查看等操
收稿日期:2019年12月31日;录用日期:2020年1月14日;发布日期:2020年1月21日
文章引用: 张志民, 李红梅, 詹武平. 基于可视化技术设计实现雷达数据处理软件平台[J]. 软件工程与应用, 2020, 9(1): 22-35. DOI: 10.12677/sea.2020.91004
lpszClassName:指向一个以零字符结尾的字符串,该字符串代表了窗口类的类名。
hIconSm:代表一个与窗口类关联的小图标的句柄。
2.1.2. 创建窗口 注册窗口类完成后,接下来调用 CreateWindowEx 函数创建窗口,函数原型如下所示[8]: HWND CreateWindowEx(DWORD dwExStyle, LPCTSTR lpClassName, LPCTSTR lpWindowName, DWORD dwStyle, int x, int y, int nWidth, int nHeight, HWND hWndParent, HMENU hMenu, HINSTANCE hInstance, LPVOID lpParam); CreateWindowEx 函数的参数较多,各个参数的含义简述如下。 dwExStyle:指定所创建窗口的扩展样式,具体样式参见文献[8]。 lpClassName、lpWindowName:二者均为指向以零字符结尾的字符串,两个字符串分别标识窗口类
Based on the Visualization Technology, Design and Implement a Radar Data Processing Software Platform
Zhimin Zhang, Hongmei Li, Wuping Zhan PLA 63620 Troops, Jiuquan Gansu
Keywords
Visualization Technology, Design and Implementation, Radar Signal Processing, Software Platform
基于可视化技术设计实现雷达数据 处理软件平台
张志民,李红梅,詹武平 解放军63620部队,甘肃 酒泉
DOI: 10.12677/sea.2020.91004
24
软件工程与应用
张志民 等
typedef struct _WNDCLASSEX {
UINT
cbSize;
UINT
style;
WNDPROC lpfnWndProc;
int
cbClsExtra;
int
cbWndExtra;
HINSTANCE hInstance;
关键词
可视化技术,设计实现,雷达数据处理,软件平台
Copyright © 2020 by author(s) and Hans Publishers Inc. This work is licensed under the Creative Commons Attribution International License (CC BY). /licenses/by/4.0/
Software Engineering and Applications 软件工程与应用, 2020, 9(1), 22-35 Published Online February 2020 in Hans. /journal/sea https:///10.12677/sea.2020.91004
张志民 等
摘要
为提高雷达数据处理效率,基于可视化技术设计实现雷达数据处理软件平台,重点给出波形图和文本窗 两个平台核心构件的设计过程。设计波形图观测数据的整体及细节,对波形曲线进行自由平移、水平缩 放、竖直缩放、查看数据点等操作,基于数据选取算法动态选取波形图数据;设计文本窗以另一种可视 化方式显示并处理数据,使用快捷菜单提高人机操作的交互性。采用快速高效绘制算法提高波形图和文 本窗的绘制速度。对某型号单脉冲雷达数据处理的应用结果表明,该软件平台达到了提高数据处理效率 的目的。
cbSize:给出本结构体的以字节为单位的大小。
styl向窗口过程的指针。
cbClsExtra、cbWndExtra:分别指定本窗口类后面、实例后面额外分配的字节数,系统会将这些字节
的内容全部初始化为零。
hInstance:本类窗口实例的句柄。
hIcon:窗口类图标的句柄。
hCursor:窗口类光标的句柄。
hbrBackground:窗口类背景画刷的句柄。
lpszMenuName : 指 向 一 个 以 零 字 符 结 尾 的 字 符 串 , 该 字 符 串 代 表 了 窗 口 类 菜 单 的 资 源 名 。 若
lpszMenuName 为 NULL,那么本窗口类产生的窗口将没有默认菜单。
此外,图 1 中的雷达数据处理软件平台架构还包含面向对象程序设计技术、命令消息分发机制、微 软基础类库(Microsoft Foundation Class, MFC)、多文档界面技术(Multiple Document Interface, MDI)模块, 它们的作用是充分利用现代软件开发理念及开发工具,提高开发效率。举例来说,一批雷达数据既可以 波形图显示,又可以文本窗形式显示。再考虑用户同时处理多批雷达数据的情形,不难理解为提高软件 开发效率,应该基于 MFC 采用 MDI 界面设计技术,以使不同批数据采用不同的波形图和文本窗来容纳。 从具体实现角度来看,所有波形图和文本窗都属于同一类对象[5] [6] [7]。