激光枪自动射击装置(二等奖)
激光枪自动射击装置
激光枪自动射击装置(E题)摘要:本设计采用FPGA和STM32单片机作为控制处理核心单元。
FPGA采用SOPC技术,控制COMS数字摄像头OV7620对图像进行捕获、处理,识别激光枪投射在胸环靶上的弹着点光斑,并在液晶屏上显示胸环靶的相应图形和弹着点的环数与方位信息。
STM32通过无线模块接收弹着点准确信息,控制舵机旋转,从而控制激光枪的精准瞄准。
本系统具有人机交换界面,各参数及测试模式可由键盘输入并显示,智能性好,反应速度快,完成了题目的所有基本指标及全部发挥部分要求。
关键词:FPGA;SOPC;摄像头;打靶一、系统方案1.1整体方案描述本系统以FPGA和STM32单片机为核心实现了环数及方位识别、无线传输、液晶显示、模式设定及激光枪精确打靶等功能。
FPGA采用SOPC技术,驱动COMS 数字摄像头OV7620捕获图像,获取图像数据,利用二值化、边缘检测等图像处理算法,识别激光枪投射在胸环靶上的弹着点光斑,获取弹着点的环数与方位信息,并将信息通过NRF24L01无线模块传输给STM32单片机进行相应的处理。
STM32单片机通过NRF24L01无线模块接收弹着点准确信息,并在液晶上显示出来。
此外,STM32单片机通过控制舵机旋转,驱动激光枪精准瞄准,实现从胸环靶上的指定位置迅速瞄准并击中靶心的功能,以及可通过键盘设定环数,控制激光枪瞄准击中胸环靶上相应位置。
本系统总体结构框图如图1所示。
1.2方案比较与选择1.1.1摄像头方案一:采用CCD摄像头。
CCD摄像头具有分辨率高、接线简单等优点。
但由于其输出是模拟信号,后级还需加上解码芯片,结构复杂,且处理困难。
方案二:采用CMOS数字摄像头。
CMOS数字摄像头具有体积小,工作电压低,提供单片VGA摄像头和影像处理器的所有功能等优点。
综合上述比较,考虑到本设计采用FPGA处理,而CMOS摄像头输出是数字信号,可直接由FPGA处理,非常方便,故选择方案二。
激光在军事上的应用

4)激光侦察
“室内讲话,墙外有耳”
二、激光通信
以激光作为载波传递信息的一种通信方式。 1)大气激光通信 构造: 接收机 发射机 Laser
大气传输
发射望远镜 接收望远镜 光电转换器
调制器
放大器
放大器
解调器
发话器
受话器
优点:结构简单,通信轻便。保密性好,抗干 扰能力强。 缺点:在大气中传输,激光衰减严重,天气影响 大,且只能直线传播,通信受到限制。
2)激光雷达
激光雷达:采用类似于激光测距机的原理与构造研制,是一种工作 在从红外到紫外光谱段的探测系统。 工作原理:激光雷达最基本的工作原理与无线电雷达没有区别,即 由雷达发射系统发送一个信号,经目标反射后被接收系 统收集,通过测量反射光的运行时间而确定目标的距离。 至于目标的径向速度,可以由反射光的多普勒频移来确 定,也可以测量两个或多个距离,并计算其变化率而求 得速度。 特点:光波频率高、波束窄 优点:测量精度高; 测角速精度,理论上CO2激光雷达比微波雷达 高一亿倍以上,现在已做到高1000~10000倍。 分辩率高; CO2激光雷达分辨率可达厘米甚至毫米级,比 微波雷达高近 100 倍; 体积小、重量轻、机动性能好。 缺点:受天气影响,不能全天候工作。
激光雷达的应用
生化战高手:陆用激光雷达
俄罗斯研制成功的KDKhr―1N远距离 地面激光毒气报警系统。 德国军方也研制出更加先进的 “VTB———1型 ”遥测激光雷达。 飞行防撞高手:空用激光雷达 美国率先研制的直升机超低空飞行“障碍规避雷达” 随之,德国研制成功的“Hellas ”激光雷达更胜一筹 法国和英国合研的吊舱载“CLARA”激光雷达 捕获水下目标高手:海用激光雷达 美国诺斯罗普公司研制的“ALARMS”机 载水雷探测激光雷达
四年级下册的作文我的奇思妙想大小激光枪

四年级下册的作文我的奇思妙想大小激光枪全文共5篇示例,供读者参考篇1【四年级下册:我的奇思妙想-大小激光枪】你们有没有过这样的奇思妙想啊?我是经常有哦!比如说,上次我就想象过拥有一把超级无敌大激光炮,可以一炮轰掉整个外星飞船呢!不过后来我仔细一想,如果我真的有一把这么厉害的大激光炮,那可就麻烦了。
第一,它一定超级沉重,我这个小身板可拿不动啊!就算是大人,恐怕也得用起重机来搬运吧。
第二,如果我不小心按错按钮,说不定就会误伤无辜呢,那多可怕啊!想想都觉得后怕。
所以后来我就有了一个更棒的点子--做一把袖珍迷你小激光枪!就藏在口袋里,谁也看不见它。
可是一旦出现坏人想要欺负人或者抢劫,我就可以把它掏出来,给他们点颜色看看。
敌人看到后,准会马上落荒而逃吧!我已经在脑海里构思了无数次要如何制作这把小小的神奇激光枪。
首先,它的外壳当然是用最坚硬的合金材料制成了,这样才不会轻易被破坏掉。
其次,能量来源绝对是采用最先进的微型核反应堆,永不用担心供电问题。
再次,枪身上还配备了热感应仪和红外扫描仪,可以精准锁定目标。
枪口处则装了世界上射程最远、威力最猛的高能量激光发射装置。
总之,就是小小的一把,却把各种尖端科技完美地融合在一起了!不过话说回来,它还是很小只的,射程虽远却杀伤力不大。
所以我也不准备用它伤害任何生命,就是给坏人点小小的颜色瞧瞧而已。
不过要是遇到外星人入侵地球,我可能就会考虑把能量加到最大,给他们点猛料喝喝了!这把袖珍小激光枪最神奇的功能可不是射击哦,而是它配备了一部微型全息投影仪。
只要按下一个按钮,它就能投射出一个等身大小的全息分身!而且这个分身实力非同小可,简直就是无所不能:可以和坏人大战三百回合,也可以帮我做家课和家务劲,还能代我出席无聊的party......只要掩护得当,再大的阴谋都难不倒我们小小大师兄!哎,我这奇思妙想可真是妙啊!不过这只是我的一个小小的愿望而已,说不定有一天就能实现了呢!只要我继续努力学习,将来做了科学家,或许就能亲手打造出我理想中的这款大小激光枪咯!到时候,我一定第一个把它送给我最最亲爱的老师和家人,让他们也尽情体验一下这种无穷的乐趣!篇2最近,我和爸爸妈妈在电视上看了一个介绍高科技激光枪的节目,看得我目不转睛。
激光自动射击装置设计与研究
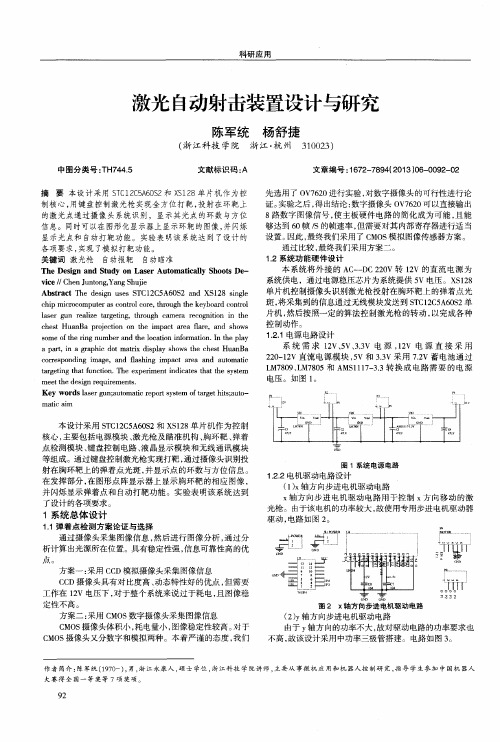
先选用 了 0 V 7 6 2 0进行实验 , 对数字摄像头 的可行性进行论 证。 实验 之 后 , 得 出结 论 : 数字摄像头 0 V 7 6 2 0可 以直 接 输 出 8 路 数字 图像 信号 , 使 主板硬 件电路 的简化成 为可能 , 且能 够达到 6 0帧 / s的帧速率 , 但需要对其 内部寄存器进行适 当 设 置。 因此 , 最终我们采用 了 C MO S模拟图像传感器方案。 通过 比较 , 最终我们采用方案二 。 1 . 2系统功能硬件设计 本 系统将外 接 的 A C ~D C 2 2 0 V转 1 2 V的直流 电源为 系统供电 ,通过 电源稳压芯片为系统提供 5 v电压。X S 1 2 8
c h e s t Hu a n B a p r o j e c t i o n o n t h e i m p a c t a r e a l f a r e , a n d s h o w s
s o me o f t h e r i n g n u mb e r a n d t h e l o c a t i o n i n f o r ma t i o n . I n t h e p l a y a p a r t ,i n a g r a p h i c d o t ma t i r x d i s p l a y s h o ws t h e c h e s t Hu a n B a c o r r e s p o n d i n g i ma g e ,a n d l f a s h i n g i mp a c t a r e a a n d a u t o ma t i c t a r g e t i n g t h a t f u n c t i o n . h e T e x p e ime r n t i n d i c a t e s t h a t t h e s y s t e m me e t t h e d e s i g n r e q u i r e me n t s . Ke y wo r d s l a s e r un g ; a u t o ma t i c r e p o t r s y s t e m o f t a r g e t h i t s ; a u t o -
激光枪自动射击报靶装置
子
测
试
激光枪 自动射击报靶装置
陈启 昂 潘瑶麟 楼奇 力
( 中国计量 学院现代科技 学院 3 1 0 0 1 8 )
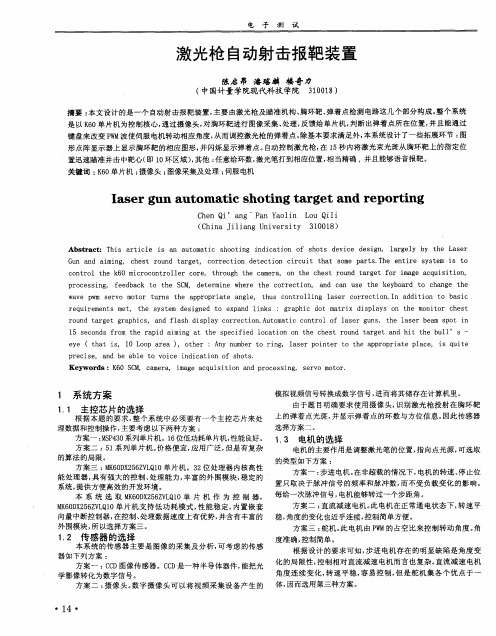
摘要 : 本文 设计的是一个 自动射击 报靶装 置, 主要 由激光 枪及瞄准机构 、 胸 环靶、 弹着 点检测 电路这几个部分构成 。 整个系统 是以 K 6 0单片机为控制核心 , 通 过摄像头, 对胸环靶进行 图像 采集、 处理 , 反馈给单片机 , 判 断出弹着 点所在位置 , 并且能通过
r o u n d t a r g e t g r a p h i c s ,a n d f l a s h d i s p l a y c o r r e c t i o n . A u t o m a t i c c o n t r o l o f l a s e r g u n s ,t h e l a s e r b e a m s p o t i n 1 5 s e c o n d s f r o m t h e r a pi d a i m i n g a t t h e s p e c i f i e d l o c a t i o n o n t h e c h e s t r o u n d t a r g e t a n d h i t t h e b u l 1 ’S —
G u n a n d a i m i n g , c h e s t r o u n d t a r g e t ,c o r r e c t i o n d e t e c t i o n c i r c u i t t h a t s o m e p a r t s . T h e e n t i r e s y s t e m i s t o c o n t r o l t h e k 6 0 m i c r o c O n t r o l 1 e r c o r e , t h r o u g h t h e c a m e r a , o n t h e c h e s t r o u n d t a r g e t f o r i m a g e a c q ui s i t i o n , p r o c e s s i n g , f e e d b a c k t o t h e S C M ,d e t e r mi n e w h e r e t h e c o r r e c t i o n , a n d c a n u s e t h e k e y b o a r d t o c h a n g e t h e w a v e p w m s e r v o m o t o r t u r n s t h e a p p r o p r i a t e a n g l e , t h u s c o n t r o l l i n g l a s e r c o r r e c t i o n . I n a d d i t i o n t o b a s i c
激光自动射击装置设计与研究
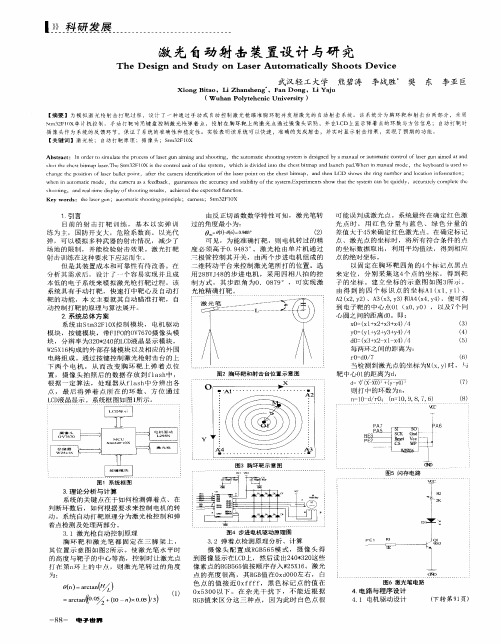
1 引言 目 前 的 射 击 打 靶 训I 练 , 基 本 以 实 弹 训1 练 为 主 , 国 防 开 支 大 , 危 险 系 数 高 。 以光 代 弹 , 可 以模 拟 多 种 武 器 的 射 击 情 况 , 减 少 了 场 地 的 限 制 , 并能 检 验 射 击 效 果 激 光 打 靶 身 f 、 击 训j 练在这种要求下应运而生 。 但 是 其 装 置 成 本 和 可 靠 件 有 待 改 善 。在 分 析 其 需 求 后 ,设 计 ’ 个 容 易 实 现 并 且 成 本 低 的 电 子 系 统 来 模 拟 激 光 枪 打 靶 过 程 。 该 系统 具 有 手 动 打 靶 , 快 速 打 中 靶 心 及 自动 打 靶 的功 能 ,本 文 主 要 就 其 自动 瞄 准 打 靶 , 自 动 挖 制 打 靶 的 原 理 与算 法 展 开 。 2 系 统 总 体 方 案 系统 由S t m 3 2 F 1 0 X 控 制 模 块 , 电机 驱 动 模块 ,按键模块 ,带F I F 0 的0 V 7 6 7 0 摄 像 头 模 块 ,分 辨 率 为 3 2 0 * 2 4 0 的L e D 液晶显示模 块 , W 2 5 X 1 6 g o 成 的 外 部 存 储 模 块 以及 相 应 的 外 围 电路 组 成 。通 过 按 键 控 制 激 光 枪 射 击 台 的 上 F两 个 电 机 , 从 而 改 变 胸 环 靶 上 弹 着 点 位 置 ,摄 像 头 拍 照 后 的 数 据 存 放 到 f l a s h 中, 根 据一 定算 法 ,处理器 从f l a s h 中 分 辨 出 各 点 ,最 后将 弹 着 点所 在 的环 数 、方 位 通过 L C D 液 晶显 示 。 系 统 框 图 如 图1 所示 。
武汉轻 工大学 熊碧 涛 李战胜 樊 东 李亚 巨
山东理工大学第七届电子设计竞赛题目
发挥部分
(1)能实时测量并数字显示电子负载两端的电压,电压测量精度为±(0.02%+0.02%FS),分辨力为1mV。
(2)能实时测量并数字显示流过电子负载的电流,电流测量精度为±(0.1%+0.1%FS),分辨力为1mA。
(3)具有直流稳压电源负载调整率自动测量功能,测量范围为0.1%~19.9%,测量精度为±1%。为方便,本题要求被测直流稳压电源的输出电压在10V以内。
2.要求“模拟模块”输出Vb的?3dB高频截止频率为4.5 kHz±0.5 kHz。如果所测高频截止频率≥6 kHz,则以后项目将不予评测。
3.根据对高频响应特性的要求,频率补偿电路中插入适当的低通滤波电路可以有效降低输出Vo的高频噪声。此外,还应注意输入电路的屏蔽。
4.在图1所示开关K切换到接地端的条件下,在T端接入图2(a)所示的电路可简化系统频率特性的测试、调整过程。设定函数信号发生器输出Vt为频率500Hz、峰峰值5V的三角波电压,则输出Vb的波形应近似为方波脉冲。如果频率补偿电路的参数已调整适当,则输出Vo的方波脉冲会接近理想形状。若高频截止频率为fH=50kHz,则输出的方波脉冲上升时间应为tr≈7μs;若fH=100kHz,则tr≈3.5μs;tr的定义如图2(b)所示。应用fH·tr≈0.35的原理,可将系统的频率响应特性调整到所要求的指标。注意:Ci到运放A反相输入端的引线应尽量短,以避免引入额外干扰。
移动,能立即稳定地显示声响模块的x、y坐标值,误差的绝对值不大于10mm。
(3)具有显示声响模块移动轨迹的功能。当声响模块在坐标纸上按指定路径移动时,液晶显示屏能动态显示声响模块移动的轨迹,显示的轨迹与声响模块移动的路径一致。
《单片机原理及接口技术》教学探索

《单片机原理及接口技术》教学探索作者:陆晓燕来源:《电子世界》2012年第23期【摘要】《单片机原理及接口技术》是电子类专业的核心课程,该课程教学内容多,实践性和理论性强。
本文针对教学过程中存在的一些问题,就如何提高教学效果、培养学生的应用能力,提出了一些切实可行的探索方法。
【关键词】单片机;教学目标;教学方法现代人类生活中所用的几乎每件电子和机械产品中都会集成有单片机。
手机、电话、计算器、家用电器、电子玩具、掌上电脑以及鼠标等电脑配件中都配有1-2部单片机。
复杂的工业控制系统上甚至可能有数百台单片机在同时工作。
单片机的数量不仅远超过PC机和其他计算的总和,甚至比人类的数量还要多。
由此可见,《单片机原理及接口技术》是电子类专业本、专科学生的一门核心课程。
通过本门课程的学习,使学生具有单片机应用系统硬件设计及软件编程的能力,为将来学习DSP、嵌入式系统、毕业设计及参加工作打下良好的基础。
因此做好该课程的教学,对提高教学质量和培养学生的创新能力具有重要的意义。
因此,如何提高教学效果,激发学生们的学习兴趣,培养学生们分析解决问题的能力,是教学过程中必须要解决的问题。
下面结合作者多年的教学实践,从几个方面进行探讨。
1.根据教学目标确定教学内容《单片机原理及接口技术》的教学目的是使学生初步掌握单片机工作的基本原理和接口技术,熟悉汇编语言,能够将软硬件结合起来进行开发应用等,为后续课程的学习以及未来从事微机系统设计开发工作打下良好的基础。
因此,必须根据教学目标选择教学内容。
早期的单片机都是8位或4位的。
随着工业控制领域要求的提高,开始出现了16位单片机,但因为性价比不理想并未得到很广泛的应用。
90年代后随着消费电子产品大发展,单片机技术得到了巨大提高。
随着INTEL i960系列特别是后来的ARM系列的广泛应用,32位单片机迅速取代16位单片机的高端地位,并且进入主流市场。
按常理,我们应该讲授最新最先进单片机,不仅速度快而且功能十分丰富强大,但在教学中我们仍选用的51系列的8位单片机为主,16位的单片机为辅。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2012年江苏省大学生电子设计竞赛(TI杯)激光枪自动射击装置(E题)【本科组】参赛学校:南京农业大学参赛队员:王硕王天博张玉梅参赛编号: 025130激光枪自动射击装置(E题)摘要:本系统由激光发射模块、弹着点位移控制模块、图像采集模块、射击成绩处理模块、射击成绩显示模块等组成;整个系统的控制以TI公司的超低功耗单片机MSP430F149为核心,通过控制步进电机驱动器(ZD-8731-D)分别驱动两个1.8°可16细分的步进电机(39BYG250-22),可实现激光枪弹着点在靶纸上的上下、左右移动,并实现弹着点位置的精度控制在0.6cm以内;图像采集模块采用带有FIFO缓冲器的OV7670摄像头检测胸环靶上弹着点位置,并通过1602显示数据采集结果。
本设计总体程序简洁,响应时间快,控制精度高,能通过摄像头采集的图像实现准确显示弹着点环数与方位,迅速控制光斑瞄准靶心,根据设定位置瞄准相应环数等功能,符合题目基础与发挥部分要求。
关键词:目录1.方案论证与比较 (1)1.1 控制器的论证与选择 (1)1.2 电机模块的论证与选择 (1)1.2.1 电机的论证与选择 (1)1.2.2步进电机驱动器的的论证与选择 (1)1.3摄像头的论证与选择 (2)2.理论分析与计算 (2)2.1射击位控制电路分析与计算 (2)2.2靶位检测电路分析与计算 (3)3.系统设计 (5)3.1 总体设计 (5)3.2 硬件电路设计 (5)3.2.1胸环靶的检测电路 (5)3.2.2射击位的控制电路 (6)3.3控制方法和程序设计 (7)3.3.1程序功能描述 (7)3.3.2主程序分析设计 (7)3.3.3胸环靶的检测方法与程序设计 (7)3.3.4射击位的控制方法与程序设计 (8)3.3.5源程序 (8)4.测试方案与测试结果 (8)4.1 测试仪器及软件 (8)4.2 测试方案 (9)4.2.1硬件测试 (9)4.2.2软件测试 (9)4.3 测试结果 (9)4.4结果分析及结论 (10)5.总结 (10)参考文献 (11)附录一:硬件电路图 (12)附录二:部分源程序 (13)附录三:主要元器件清单 (13)1.方案论证与比较1.1 控制器的论证与选择方案一:采用FPGA作为系统的控制器FPGA内部有丰富的触发器和I/O引脚,周期短,开发费用低,风险小,其采用高速CMOS工艺,功耗低,可以与CMOS、TTL电平兼容。
但是由于其集成度高,使其成本偏高,同时由于芯片引脚较多,实物硬件电路板布线复杂,加重了电路设计和实际焊接的工作。
方案二:采用MSP430系列单片机此单片机功能较强,兼容性好,性价比高;具有体积小,集成度高,易扩展,可靠性高功耗小以及具有较高跌数据处理和运算能力,系统最高时钟频率8MHz,且一个时钟周期为一机器周期,运行速度快;MSP430F149单片机内部集成了12位A/D转换器件。
通过采样,结合内部高测量精度,同时也能利用软件对测量误差进行补偿,这给调试,维护和功能的扩展,性能的提高,带来了极大的便利。
综合考虑,采用方案二。
1.2 电机模块的论证与选择1.2.1 电机的论证与选择方案一:采用直流电机直流电机用于调速控制时比较完善,但造价高,结构复杂、换相困难,难于控制转轴的角度和转速,精确度难以达到要求,而且存在累积误差,用于此控制系统显然不适合。
方案二:采用伺服电机伺服电机可使控制速度、位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。
转子转速受输入信号控制,并能快速反应,在自动控制系统中,具有机电时间常数小、线性度高、始动电压等特性,但是成本过高。
方案三:采用步进电机步进电机是专门用于位置和速度精确控制的特定电机。
它的最大特点是其“数字性”,对于控制器发过来的每一个脉冲信号。
39BYG250-22两相步进电机步距角为1.8°,从精度和成本考虑都能够满足题目控制要求,。
综合考虑,采用方案二。
1.2.2步进电机驱动器的的论证与选择本系统中采用ZD-8731-D高性能双轴步进驱动器。
ZD-8731-D高性能双轴步进驱动器具有整步、半步、四细分、十六细分可调功能,其输出电流线性可调,具有过热自动保护功能,并且能自动半流锁定,支持脱机、使能、锁定等功能。
该驱动器具有较高的集成度和可靠性,能够同时驱动两个步进电机,可完全分开控制,接口采用超高速光耦隔离,具有高抗干扰能力。
1.3摄像头的论证与选择(1)模拟摄像头和数字摄像头的比较模拟摄像头捕捉到的视频信号必须经过特定的视频捕捉卡将模拟信号转换成数字模式,并加以处理后才可以转换到单片机上运用。
数字摄像头可以直接捕捉影像,然后通过串、并接口传到单片机里。
综合考虑,本设计中采用数字摄像头。
(2)普通数字摄像头与带FIFO 存储模块的数字摄像头的比较普通摄像头的时钟速度可高达24M ,而MSP430单片机的晶振为8M ,IO 口速度不能达到要求。
带FIFO 存储模块的数字摄像头,是针对慢速的MCU 能够实现图像采集控制推出的带有缓冲存储空间的一种模块,解决了慢速MCU 图像采集的速度瓶颈问题。
综合考虑,本系统采用OV7670带FIFO 模块摄像头,可实现高质量图片的采集。
2.理论分析与计算2.1射击位控制电路分析与计算本系统采用MSP430单片机控制驱动ZD-8731-D 双轴步进驱动器驱动双39BYG250-22步进电机,并通过外接按键控制实现步进电机的上下、左右二维运动。
系统建立数学模型如图1所示。
该步进电机的步距角为1.8°,而通过计算可知,激光点每次移动一环位置所用的最小角度为:因此,应通过驱动器将步进电机的步距角16细分,得到步进电机最小步距角为:因为︒<<︒947.01125.0在此条件下,本控制电路可完全实现题目对射击位控制电路的要求。
图1 射击位控制模型2.2靶位检测电路分析与计算本系统摄像头采用OV7670+FIFO模块,能够将采集的数据暂存于FIFO寄存器中。
FIFO引脚与单片机I/O口直接相连,通过单片机控制图片的采集。
COMS 通过IIC与FIFO通讯,将单张图片信息写入FIFO寄存器中。
FIFO可以采集320*240质量的黑白图片,采集完程序后,FIFO向单片机发出信号,单片机接受到信号后,开始从FIFO中读取数据。
由于430单片机的数据存储能力不强,所以本系统采用跳帧采样、和逐行处理的方式,从FIFO中读取并存储了128*128像素的灰度图片,并通过设定阈值,把图像二值化,得到二值化的矩阵,并对得到的二值化矩阵进行分析和计算。
对图片的处理,是通过靶纸上无激光点和靶纸上有激光点的二值化矩阵的区别来获得激光点的位置的,把无激光点时的图像作为背景图像,把有激光点的图像作为比较图像,并通过比较得到激光点的位置,最后通过激光点与靶纸中心黑点的相对位置来判断激光点的位置。
具体的定位计算方法如下:按照下图建立直角坐标系:由于激光点在二值化的图片上是一个由许多像素点组成的实心黑圈,因此,可以对其所有像素点的横、纵坐标分别相加取平均数:nxX ni i∑==0 ③nyY ni i∑==④由①②公式就能得到激光点的像素点位置的坐标),(Y X ,随后再放大到实际尺寸的比例,就能得到激光点在靶纸上的实际坐标。
同理,根据中心实心黑色正方形的所有像素点的坐标也可以得到圆心坐标),(00Y X 。
根据激光点的坐标和圆心点的距离22)()(00Y Y X X r -+-=、激光点与圆心点连线的斜率00X X Y Y k --=,就能够很容易的确定激光点所在的区域。
x3.系统设计3.1 总体设计系统以MSP430单片机为核心,通过按键切换工作模式,将摄像头采集的射击定位数据实时传输到MCU,控制驱动器驱动两个步进电机实现激光枪光斑在胸环靶上下、左右移动,并通过1602显示射击环数及方位。
通过键盘和MCU控制激光枪的亮和灭。
整体系统框图如图3所示。
图3 整体系统框图3.2 硬件电路设计3.2.1胸环靶的检测电路本系统摄像头采用OV7670+FIFO模块,能够将采集的数据暂存于FIFO寄存器中。
FIFO引脚与单片机I/O口直接相连,通过单片机控制图片的采集。
示意图如图4。
图4 胸环靶检测控制图如图所示,COMS通过IIC与FIFO通讯,将单张图片信息写入FIFO寄存器中。
在采集完整张图片后,将图片送入MCU进行图像处理,确定弹着点位置。
CMOS与FIFO连接图详见附录一。
3.2.2射击位的控制电路驱动器与单片机采用共阳接法(公共正方式),接线图如图5所示。
图5 驱动器接线图3.3控制方法和程序设计3.3.1程序功能描述本系统根据题目要求设定为四种模式,通过按键实现四种模式的的切换功能。
模式一:实现基本要求(1),激光束照射于胸环靶上弹着点的光斑直径<5mm,模式二:实现基本要求(2)(3),可通过键盘控制激光枪上下、左右射击,并通过摄像头识别弹着点光斑,液晶显示射击环数与方位信息。
模式三:激光枪在15秒内瞄准击中靶心。
模式四:激光枪根据设定环数瞄射击。
3.3.2主程序分析设计系统初始化后,进入功能键判断状态,通过四个按键控制分别四个模式的执行与切换。
主程序流程图如图6所示。
图6 主程序流程图3.3.3胸环靶的检测方法与程序设计检测胸环靶时前,把摄像头的图像首先通过串口调试助手显示在上位机上,随后,通过调节摄像头镜头的焦距是图像最清晰。
在检测胸环靶时,鉴于MSP430单片机的运算速度和存储能力,采用隔点采集的方法得到分辨率为128*128的正方形图片。
在处理具体的图片过程中,在无弹着点照射时进行一次图像采集,确定靶心位置,在有弹着点时再进行一次图像采集,图像采集后第一张图像进行对比,通过软件滤波后所得的偏差值就是弹着点位置,再通过计算其与靶心位置的距离,和其与靶心连线的斜率,即可确定相应环数。
3.3.4射击位的控制方法与程序设计射击位的控制主要通过两个可以细分的步进电机、与步进电机配套的驱动器和MSP430脉冲控制组成。
通过激光点的位置坐标和期望点的位置坐标,可以计算出水平方向旋转的步进电机和数值方向旋转的步进电机需要旋转的、角度α和β,由于步进电机是1.8°、十六细分的,故可以求得步进电机需要旋转的步数:1125.0αα=n ⑤ 1125.0ββ=n ⑥而步数和步进电机的转动方向是需要单片机控制的,脉冲个数就等于旋转的步数,方向是通过单片机给驱动器高低电平来实现的。
3.3.5源程序部分源程序见附录二。
4.测试方案与测试结果4.1 测试仪器及软件4.2 测试方案4.2.1硬件测试采用数字万用表和示波器对电路板连接情况测试。
4.2.2软件测试通过Multism和Proteus分别对模拟电路和单片机进行仿真。