自动射击报靶装置
自动射击报靶装置
自动射击报靶装置徐暑葛宇清李亚运南京医科大学基础医学院生物医学工程系一.引言 (5)二.硬件部分方案设计 (5)1.激光笔方位控制方案论证 (6)1.1电机选择方案 (6)1.2电机驱动模块的方案论证 (6)1.3电机组合方案 (7)1.4激光枪控制方案论证 (8)2.图像采集方案 (8)3.无线通讯模块 (9)4.显示模块 (9)四:软件部分设计 (11)1.射击位控制 (11)2.靶位检测的分析 (12)四.系统调试 (17)2.测试内容 (17)a.基础要求 (17)b.发挥部分 (18)3.结果分析 (18)附录: (19)摘要:系统采用两片MSP430F149作为激光枪自动射击装置控制系统的控制核心,其中1片作为主MCU控制激光枪模块的击发、自动瞄准程序、通过弹着点坐标判定打靶环数及方位,自动报靶及在12684液晶屏上显示弹着点位置等功能,另外1片MSP430F149单片机进行图像识别处理,确定弹着点坐标,并通过nrf905无线发送给主MCU,其中弹着点检测采用带有FIFO的OV7670摄像头模块进行图像信息的采集。
主控制模块单片机接收弹着点的坐标信息,进而控制电机运转方向及步数进行弹着点的调整。
本系统可实现激光枪自动射击,通过键盘控制激光枪的弹着点在胸靶上位置,通过摄像头识别激光枪投射在胸环靶上的弹着点光斑,并显示弹着点的环数与方位信息,同时具有易于操作,精确控制,低功耗等优点。
关键词:MSP430;ov7670摄像头;自动射击;nrf905Abstract:The system uses two MSP430s as Cybernetics Core of the laser gun automatic shooting device .One MSP430 is used as main MCU.It controls the shooting of the laser gun ,also used in auto-targeting program. It determines the number of target loop and location through the coordinate of the impact point.Another MSP430F149 MCU is for image recognition processing, determing the coordinates of the spot and send the message to the main MCU through the NRF905 wireless. The impact point detection module acquires an OV7670 camera with a FIFO. The camera is for the acquisition of the image information.After receiving the impact point location information, the MSP430 would control the motor so that it could make adjustments about the impact point.This system can realize automatic shooting ,. We can set Where the impact point locates on the target through the keyboard.. It also can show tthe number of target loop and the locate information of the impact point.Meanwhile it has such advantages like easy operation, accurate control and low power consumption. Keyword: MSP430;ov7670camera;automatically shooting;一.引言题目要求制作一个能够控制激光枪击发、自动报靶及自动瞄准等功能的电子系统。
实弹射击自动报靶装置[实用新型专利]
![实弹射击自动报靶装置[实用新型专利]](https://img.taocdn.com/s3/m/07468cedbb68a98270fefaa7.png)
专利名称:实弹射击自动报靶装置
专利类型:实用新型专利
发明人:方亚生,项道才,陈焕运,陈坤峰申请号:CN00213622.8
申请日:20000228
公开号:CN2423562Y
公开日:
20010314
专利内容由知识产权出版社提供
摘要:一种实弹射击自动报靶装置,由环数和区位接收电路与锁存电路,触发电路相连,接收电路产生一触发信号,触发信号再由控制盒CPU检测并处理,然后经有线或无线式,经过软件处理,再变换成模拟信号,经放大、驱动送扬声器或耳机,实现自动报靶。
不需人工,可实现自动报靶,提高了准确性,速度和安全性。
可以应用于手枪,冲锋枪,半自动和自动步枪,还可以应用于轻、重机枪,40火箭筒,非瞬发引信直瞄火炮等各类重武器的实弹射击报靶。
申请人:中国人民解放军山东省青岛市黄岛区人民武装部
地址:266500 山东省青岛市黄岛区人民武装部
国籍:CN
代理机构:青岛市专利服务中心
代理人:迟承柏
更多信息请下载全文后查看。
一种可全地形运动的实弹射击自动报靶装置[实用新型专利]
![一种可全地形运动的实弹射击自动报靶装置[实用新型专利]](https://img.taocdn.com/s3/m/a5a6673c360cba1aa911dac5.png)
专利名称:一种可全地形运动的实弹射击自动报靶装置专利类型:实用新型专利
发明人:于新帅,韦礼东
申请号:CN201820029771.7
申请日:20180109
公开号:CN208012463U
公开日:
20181026
专利内容由知识产权出版社提供
摘要:本实用新型提供的一种可全地形运动的实弹射击自动报靶装置,属于自动报靶装置技术领域。
包括自动报靶靶体,自动报靶靶体通过支撑架与无轨式防弹运动机构连接,还包括与无轨式防弹运动机构配套设置的运动遥控板;自动报靶靶体包括第一子弹橡胶板、容弹钢板、检测传感单元和多组弹性结构件;第一子弹橡胶板和容弹钢板相连共同构成容弹靶;各组弹性结构件一端与容弹靶固定连接,另一端与所述支撑架连接;检测传感单元固定在支撑架上,并与无轨式防弹运动机构电连接。
本实用新型装置具有结构简单,可以在野外全地形灵活移动,实现自动报靶,提高训练效率,更好的适用野外地形要求,并可以对自身整体装置进行防弹保护和防止跳弹对人员和物品造成伤害。
申请人:韦礼东
地址:100091 北京市海淀区远大路22号2号楼2单元102
国籍:CN
代理机构:北京清亦华知识产权代理事务所(普通合伙)
代理人:廖元秋
更多信息请下载全文后查看。
一种炮兵实弹射击自动报靶装置及方法[发明专利]
![一种炮兵实弹射击自动报靶装置及方法[发明专利]](https://img.taocdn.com/s3/m/e86b48cdcfc789eb162dc856.png)
专利名称:一种炮兵实弹射击自动报靶装置及方法
专利类型:发明专利
发明人:赵玉忠,卢士国,吴怀群,王兆松,陶姞歧,宋锡周,吴谢辉
申请号:CN202010507820.5
申请日:20200605
公开号:CN111637797A
公开日:
20200908
专利内容由知识产权出版社提供
摘要:本发明公开了一种炮兵实弹射击自动报靶装置及方法,包括激光机构、测量机构、控制和数据处理模块、远程通信模块以及电源。
通过激光机构发射激光束,并利用激光束形成激光幕覆盖靶标,实时测量通过扫描区域飞弹的距离及速度、角度等信息,并计算飞弹的空间坐标,拟合弹道方程并外推弹道,求取弹道与地面的交点坐标,根据其与靶标中心的位置关系评定成绩,报靶精度高,客观性强,同时通过震动探测模块探测炮弹爆炸产生的震动,并与激光探测的炮弹相比对,能够比较准确地探测出未爆弹的位置信息,无需人工在落弹区内拉网式寻找,作业效率高、安全风险低。
申请人:南京拓恒无人系统研究院有限公司
地址:211153 江苏省南京市江宁经济技术开发区东吉大道1号江苏软件园内(江宁开发区)
国籍:CN
代理机构:南京业腾知识产权代理事务所(特殊普通合伙)
代理人:缪友益
更多信息请下载全文后查看。
一种轻武器射击自动报靶装置[实用新型专利]
![一种轻武器射击自动报靶装置[实用新型专利]](https://img.taocdn.com/s3/m/b94fd6458f9951e79b89680203d8ce2f00666521.png)
(10)授权公告号(45)授权公告日 (21)申请号 201520601821.0(22)申请日 2015.08.12F41J 5/00(2006.01)(73)专利权人董高庆地址102202 北京市昌平区南口63936部队四室(72)发明人董高庆(54)实用新型名称一种轻武器射击自动报靶装置(57)摘要本实用新型属于轻武器射击训练保障技术领域,涉及一种轻武器射击自动报靶装置。
它包括有靶标、靶标支架、靶机、靶机座、射手显示器,还包括有:压力传感器、传感器固定支架、模拟信号处理器、数字信号处理器、数传载体。
其优点是,传感器置于靶机前面板内侧,无需防风及防雨措施;靶机结构设计、加工调试简单,生产成本低,定位精度高,使用方便,实时性强,不受风雨的影响,实现了报靶器准确报靶,提高了射击训练效率。
(51)Int.Cl.(19)中华人民共和国国家知识产权局(12)实用新型专利权利要求书1页 说明书3页 附图1页CN 205175231 U 2016.04.20C N 205175231U1.一种轻武器射击自动报靶装置,其特征是:包括有靶标(1)、靶标支架(2)、靶机(8)、靶机座(9)、射手显示器(10),其特征是:还包括有:压力传感器(4)、传感器固定支架(3)、模拟信号处理器(5)、数字信号处理器(6)、数传载体(7);压力传感器(4)安装于传感器固定支架(3)上;传感器固定支架(3)固定于靶机(8)的前面板内侧;压力传感器(4)输出连接至模拟信号处理器(5)输入端,模拟信号处理器(5)输出端连接至数字信号处理器(6)输入端,数字信号处理器(6)输出端连接至数传载体(7);传感器固定支架(3)、靶机(8)、靶机座(9)组装为一个整体。
2.根据权利要求1所述的轻武器射击自动报靶装置,其特征是:所述的压力传感器(4)的布局为“Δ”字型。
权 利 要 求 书1/1页CN 205175231 U一种轻武器射击自动报靶装置技术领域[0001]本实用新型属于轻武器射击训练保障技术领域,涉及一种轻武器射击自动报靶装置。
一种新型轻武器射击自动报靶装置[实用新型专利]
![一种新型轻武器射击自动报靶装置[实用新型专利]](https://img.taocdn.com/s3/m/6161bcf1964bcf84b8d57b10.png)
专利名称:一种新型轻武器射击自动报靶装置专利类型:实用新型专利
发明人:赵琦
申请号:CN201922452388.X
申请日:20191231
公开号:CN211425212U
公开日:
20200904
专利内容由知识产权出版社提供
摘要:本实用新型公开了一种新型轻武器射击自动报靶装置,涉及军事报靶技术领域,包括装置底座、靶标、天幕靶和环境改良机构,天幕靶固定设置在装置底座顶部,装置底座顶部还固定设置有支撑杆,靶标通过支撑杆固定设置在装置底座顶部,环境改良机构固定设置在天幕靶顶部,装置底座一侧通过电源线设置有电源插头,装置底座的外壁上设置有播音器和控制器,控制器分别与天幕靶、环境改良机构以及播音器电性连接,本实用新型结构合理且新颖,具有防虫鸟、补光以及遮雨功能,能够为天幕靶提供良好的检测环境,使得天幕靶的检测效果更加精准,同时靶标的结构设计使得靶标使用时能够在背面形成标记,便于对本实用新型中天幕靶的精准度进行检测。
申请人:北京康泰润丰科技有限公司
地址:100000 北京市丰台区草桥东路8号院1号楼跃层D-104-12
国籍:CN
更多信息请下载全文后查看。
自动射击报靶装置
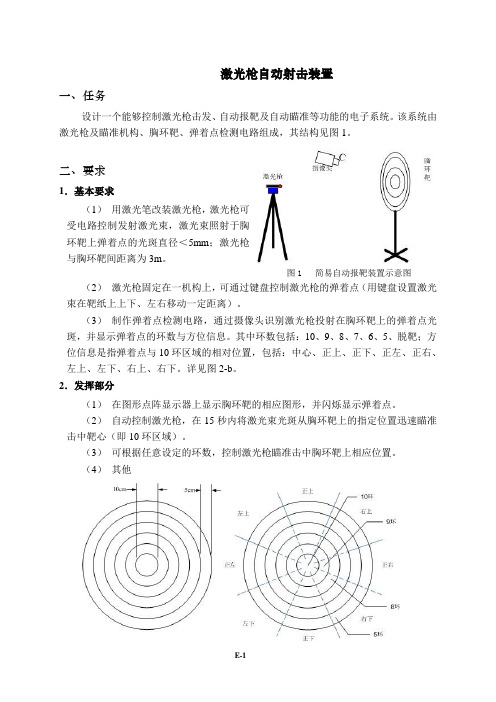
激光枪自动射击装置一、任务设计一个能够控制激光枪击发、自动报靶及自动瞄准等功能的电子系统。
该系统由激光枪及瞄准机构、胸环靶、弹着点检测电路组成,其结构见图1。
二、要求1.基本要求(1)用激光笔改装激光枪,激光枪可受电路控制发射激光束,激光束照射于胸环靶上弹着点的光斑直径<5mm;激光枪与胸环靶间距离为3m。
图1 简易自动报靶装置示意图(2)激光枪固定在一机构上,可通过键盘控制激光枪的弹着点(用键盘设置激光束在靶纸上上下、左右移动一定距离)。
(3)制作弹着点检测电路,通过摄像头识别激光枪投射在胸环靶上的弹着点光斑,并显示弹着点的环数与方位信息。
其中环数包括:10、9、8、7、6、5、脱靶;方位信息是指弹着点与10环区域的相对位置,包括:中心、正上、正下、正左、正右、左上、左下、右上、右下。
详见图2-b。
2.发挥部分(1)在图形点阵显示器上显示胸环靶的相应图形,并闪烁显示弹着点。
(2)自动控制激光枪,在15秒内将激光束光斑从胸环靶上的指定位置迅速瞄准击中靶心(即10环区域)。
(3)可根据任意设定的环数,控制激光枪瞄准击中胸环靶上相应位置。
(4)其他2-a 胸环靶尺寸2-b胸环靶环数及方位信息示意图2 胸环靶示意图三、说明1.激光枪可以由市场上的激光笔改造,由电路控制击发;每次击发使光斑维持3~5s时间,但此期间不得移动光斑。
2.可采用步进电机、舵机或直流电机等机构对激光枪进行两维控制,以实现瞄准。
激光枪及相关机构可由支架支撑。
3.胸环靶是在不反光的白纸画有一组相距5cm的同心圆(线宽不超过1mm),最内圆环直径10cm,圆环内为10环区域,从最内环至最外环间分别为9、8、7、6、5环区域,最外环外为脱靶。
胸环靶上不允许设置摄像头以外的传感器。
4.当激光枪的弹着点落在胸环靶的环线上时,报靶时采取就高不就低的原则。
例如,弹着点在8环与9环之间的环线上时,则认为是9环。
5.在不影响靶纸上圆环线的前提下,允许在靶纸上做标记。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2012年全国大学生电子设计竞赛自动射击报靶装置(E题)【LN08-01组】2012年8月8日摘要本作品模仿炮台自动寻迹、发射、报靶而制作,以激光笔代替炮弹,以步进电机组成可自动/手动控制的炮台,以OV6620采集图像信息进行处理、反馈,以LCD动态显示着弹点位置,ISD4003进行语音报靶。
主要研究工作如下:1、对自动报靶系统的总体方案进行设计,包括软件设计和硬件设计两部分。
构建了炮台自动打靶、报靶系统的硬件设计平台及其相应的控制程序。
2、研究了靶面图像获取及图像处理技术。
分析研究了中值滤波、图像差影、等图像预处理的相关算法,对着弹点识别和环值判定方法、炮台自动调整及显示进行了详细的研究,采用图像差影技术有效提取着弹点并分别加以仿真实现。
关键词:图像获取图像处理自动打靶报靶目录1系统方案 (4)1.1 核心控制电路模块的论证与选择 (4)1.2 信号采集模块的论证与选择 (5)1.3 电机驱动模块(炮台)的论证与选择............................................................................ (5)1.4 报靶模块的论证与选择 (7)2系统理论分析与计算 (8)2.1 自动打靶报靶系统的分析 (8)2.2 OV6620数字摄像头部分的计算 (8)2.3 MSP430G2553控制电机算法 (9)2.4 语音模块ISD4004控制算法 (9)3电路与程序设计 (9)3.1电路的设计 (9)3.2程序的设计 (13)4 测试方案与测试结果 (16)4.1 LCD测试: (16)4.2 步进电机测试: (17)4.3 语音模块测试: (17)4.4 图像传感器OV6620测试 (17)附录1:系统总电路图.................................................................................. 错误!未定义书签。
附录2:实物图.............................................................................................. 错误!未定义书签。
附录3:源程序..................................................................................................................................自动射击报靶装置(E题)【LN08-01组】1系统方案本作品是一套价格低廉、性能稳定、具有图像采集处理、炮台自动寻靶、自动调靶射击和记录、显示结果的完整自动射击报靶的系统,主要由核心控制电路模块、信号采集模块、报靶模块、电机驱动(炮台)模块、系统电源模块、激光枪组成(如图1.1所示),每个模块又均包含相应的硬件电路及软件程序。
本系统中若第一次激光笔未击中十环可继续自动调整打靶,同时可以通过自动/手动转换按钮完成自动/手动切换控制炮台寻、打靶。
图1.1:系统模拟简化图1.1 核心控制电路模块的论证与选择方案一:89C5289C52是常用的单片机,我们对它非常熟悉。
89C52单片机本身的电源电压是5V,有空闲和掉电两种低功耗方式在掉电状态下,在空闲模式下冻结CPU而RAM定时器、串行口和中断系统维持其功能。
掉电模式下,保存RAM数据,时钟振荡停止,同时停止芯片内其它功能。
但是80C52单片机是8位单片机,存在运行速度较慢,且不能在线编程等缺点。
方案二:MSP430G2553MSP430G2553是最近刚接触的一款低功耗的十六位单片机。
MSP430系列单片机是TI的一种16位超低功耗、具有精简指令集的混合信号处理器的全新机型。
其针对实际应用需求,将多个不同功能的模拟电路、数字电路模块和微处理器集成在一个芯片上,以提供“单片”解决方案。
该系列单片机广泛应用于需要电池供电的便携式仪器仪表中。
由于MSP430G2553拥有相较于89C52单片机处理能力强、运算速度快(接25M晶振)、超低功耗、片内资源丰富等优点。
因此我们选用方案二作为系统MCU。
1.2信号采集模块的论证与选择方案一:利用光敏电阻采集电压信号利用光敏电阻组成矩阵,每个光敏电阻串联一1K电阻,在两电阻中间引出一引脚接555芯片。
当激光枪照射后光敏电阻阻值减小,555芯片输入端由低电平跳变为高电平在其输出端产生二进制脉冲经整形后送入MCU,从而实现信号的检测。
然而该方案存电路焊接困难、当激光打到两电阻之间时采集不到信号。
尤其是当靶的面积大时这些缺点便更加突出。
方案二:摄像头采集图像信息利用OV6620图像传感器获取靶的着弹点的图像信息,然后进行图像分析,通过分析计算出光源所在位置。
该方案具有稳定性强,信息可靠性高等优点,同时克服了方案一中所存在的缺点,尤其是如本作品要求中胸环靶较大的情况下,这些优点便表现的更加突出。
综合比较以上两种方案,选择方案三。
1.3 电机驱动模块(炮台)的论证与选择1.3.1 控制电机论证与选择方案一:采用减速电机作为炮台的转动电机。
减速电机就是在普通的直流电机前边加了一个齿轮减速器。
电机的启动停止正反转是通过电位器进而改变电机的输入电压而实现的。
但其存在着定位不够准确的缺点。
方案二:采用步进电机作为炮台的转动电机。
步进电机是一种感应电机,是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。
可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度。
相较于减速电机而言,应用步进电机进行炮台的转动电机具有操作更简单,对光靶的定位更精确的明显优点。
由于炮台的转动电机需要精确定位,因此为了让激光打在光靶上取得更高的精确度,我们采用方案二。
1.3.2 步进电机驱动模块论证与选择方案一:中功率三极管直接搭建在电机驱动要求不高的地方可以用三极管直接搭建一个驱动电路,使用三极管搭建的电机驱动电路具有电路简单的优点,但功率和性能一般。
对输入信号要求较高,输出性能只能满足一般要求。
方案二:UCN5804B芯片UCN5804B芯片适用于四相步进电机的单极性驱动,它最大能输出1.5A电流、3.5V电压。
内部集成有驱动电路,上电自行复位,可以控制转向和输出使能。
电路更简单,编程更简便。
UCN5804B芯片驱动电路如图1所示。
其中4、5、12、13脚为接地引脚,1、3、6、8脚为输出引脚,电动机各相的接线如图1.3.11所示,14脚是控制电机的转向,其中低电平为正转,高电平为反转,11脚是步进脉冲的输入端,9、10脚决定工作方式:00为双四拍、01为八拍、10为单四拍、11为禁止。
但其存在UCN5804B芯片市场需求不高,而且其驱动电压需要28V,不易获得等缺点。
图1.3.11 UCN5804B芯片驱动电路方案三:ULN2003A芯片ULN2003A是高耐压、大电流、内部由七个硅NPN 达林顿管组成的驱动芯片。
ULN2003A 的每一对达林顿都串联一个2.7K 的基极电阻,在5V 的工作电压下它能与TTL 和CMOS 电路直接相连,可以直接处理原先需要标准逻辑缓冲器来处理的数据。
ULN2003A工作电压高,工作电流大,灌电流可达500mA,并且能够在关态时承受50V 的电压,输出还可以在高负载电流并行运行。
ULN2003A的输出结构是集电极开路的,所以要在输出端接一个上拉电阻,在输入低电平的时候输出才是高电平。
在驱动负载的时候,电流是由电源通过负载灌入ULN2003A的。
图1.3.12为ULN2003A芯片的引脚图。
图1.3.12 ULN2003A引脚图ULN2003A芯片适用于四相步进电机的单极性驱动,而且单片机控制简单,能实现较容易,器件常用,电源只需+5V,功能实现可行性较好。
ULN2003A芯片驱动电机的原理图如图1.3.13所示。
图1.3.13 ULN2003A芯片驱动电机原理图综合比较上述三种方案,ULN2003A芯片更常用,而且电源只需+5V,故选择方案二,四相步进电机的驱动芯片采用ULN2003A。
1.4 报靶模块的论证与选择本模块由显示报靶与语音报靶两部分组成。
其中语音芯片选择了ISD4003,该芯片可反复录音超过十万次,可在断电情况下百年不丢失,且能够非常真实、自然地再现语音、音乐,音调和效果声对于显示报靶部分则具有以下两个可行方案:方案一:数码管显示利用数码管显示具有电路连接简单、编程控制简单等优点。
但是在本系统中只能显示弹着点的环数,存在着不能显示方位等缺点。
方案二:QC12864B液晶屏显示QC12864B为汉字图形点阵液晶显示模块,可显示汉字及图形通过8 位并口或串行于MUC相连接,并配备LED背光。
在该系统中不仅能动态显示环数,且可显示出着弹点的方位信息,并可模拟胸环靶图形模拟显示方位、环数。
考虑到本系统对报靶显示部分的要求较高,因此选择方案二2系统理论分析与计算2.1 自动打靶报靶系统的分析2.1.1 OV6620数字摄像头部分由于OV6620数字摄像头的像素同步信号比MSP430G2452的指令周期要小很多,用MSP430G2452很难捕捉到其像素信息,故需在二者之间加一个数据存储器作为数据存储和缓冲。
单片机从数据存储器的像素信息矩阵表中逐行的读出信息,与事先采集到的红色像素信息进行比较(红色像素信息值为一数据区间,以保证能准确的获取红色像素信息),如果读出值代表红色信息,则输出对应的行和列,通过串口通信发回控制台。
该方案不需存储大量的图像数据,而是以数据流的形式进行处理,有效地节省了存储空间,提高了运算速度,并且算法简单,易于实现。
2.1.2步进电机部分MSP430G2553收到到反馈回的行和列的信号后,通过程序计算、处理去控制电机的转动方向和转动步数参量,使激光光斑能够自动寻靶。
2.1.3 报靶模块MSP430G2553行、列信息处理后,通过程序计算,控制LCD和语音部分,显示光斑的位置信息及ISD4004电路的语音报靶。
2.2 OV6620数字摄像头部分的计算2.2.1 图像采集行列数目计算根据本题目要求胸环靶直径为60cm,激光枪在把靶环上光斑小于5mm。
以5mm计算,若要采取隔行扫描方式且不丢失激光枪在胸环靶上的光标信息,则所需采样行、列数均需120以上。