三波谐波传动
谐波齿轮减速器设计及性能仿真(1)

分类号密级XXX毕业设计(论文)谐波齿轮减速器设计及性能仿真姓名班级XXX学位论文原创性声明本人郑重声明:所呈交的学位论文,是本人在导师的指导下,独立进行研究工作所取得的成果。
除文中已经注明引用或参考的内容外,本论文不含任何其他个人或集体已经发表或撰写过的作品或成果。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标注。
本人完全意识到本声明的法律结果由本人承担。
论文作者签名:日期:年月日XXX学位论文版权协议书本人完全了解XXX关于收集、保存、使用学位论文的规定,即:本校学生在学习期间所完成的学位论文的知识产权归XXX所拥有。
XXX有权保留并向国家有关部门或机构送交学位论文的纸本复印件和电子文档拷贝,允许论文被查阅和借阅。
XXX可以公布学位论文的全部或部分内容,可以将本学位论文的全部或部分内容提交至各类数据库进行发布和检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
论文作者签名:导师签名:日期:年月日日期:年月日摘要谐波传动是一个相对较新类型的传输。
新的运动转换原理,新的啮合特性,但柔性部件的发展有这样的传输原因需要专门的理论。
与一般的齿轮传动比,体积小,重量轻,精度高,低噪音等相比。
由于谐波传动柔轮的存在可以产生变形控制波动,从而使啮合原理,算术几何,强度计算,结构设计,与传统的刚性构件面向实质上是一个很大的区别。
关键词: 谐波、有限元、三维、减速机AbstractHarmonic drive is a relatively new type of transmission.Since the invention of the harmonic drive has experienced several decades.New sports transformation principle, a new meshing feature, a flexural member is the development of the cause of the transmission need special theory.It compared with the general gear transmission, large transmission ratio, small volume, light weight, high precision, low noise, etc.Because there exist in harmonic gear drive can cause a controllable wave deformation of soft round, so that the meshing theory of arithmetic, geometry, strength calculation, structure design, with the traditional rigid gear transmission components in nature are very differentKeywords: Harmonic, finite element, 3 d, reducer全套图纸外文翻译扣扣: 1411494633目录摘要 (3)Abstract (3)第1章绪论 (6)1.1论文概述 (6)1.2 谐波减速机国内外发展现状 (6)1.3本文研究内容 (8)1.4本文研究意义 (8)第2章谐波减速机方案设计 (9)2.1谐波减速机组成 (9)2.2谐波减速机分类 (9)2.3谐波减速机传动方案 (11)2.4本章小结 (12)第3章谐波减速机设计 (13)3.1 传动装置总体设计 (13)3.1.1传动方案的确定 (13)3.1.2刚轮柔轮齿数模数确定 (13)3.2 谐波齿轮传动的主要参数确定 (13)3.2.1主要啮合参数的选择 (13)3.2.2柔轮刚轮的几何尺寸计算 (14)3.2.3 保证传动正常工作的条件 (16)3.3 主要零件的材料和结构 (16)3.3.1柔轮材料 (16)3.3.2刚轮材料 (17)3.3.3波发生器材料 (17)3.3.4柔轮结构设计 (17)3.3.5刚轮结构设计 (18)3.4 承载能力计算 (20)3.5 传动效率的计算 (23)3.6本章小结 (23)第4章谐波减速机三维建模 (24)4.1 Solidworks三维建模技术 (24)4.2谐波减速机三维建模 (24)4.3谐波减速机装配 (31)4.4 本章小结 (34)第5章谐波齿轮减速器ADAMS仿真 (35)5.1虚拟样机技术 (35)5.2 ADAMS软件概述 (35)5.3 谐波齿轮减速器前处理 (36)5.4 谐波齿轮减速器运动仿真 (40)5.5 本章小结 (42)总结43致谢 (44)参考文献 (45)第1章绪论1.1论文概述传动原理与普通谐波传动齿轮是相异的,它是利用柔性齿轮的受控弹性变形。
绿的谐波——领跑机器人精密谐波减速器

1)齿高较低,不需要很深的啮合距离就可以获得 较大的啮合量,可承受较大的扭矩;
LHS/LHSG—III中空系列谐波减速器LHS/LHSG—IV实轴系列谐波减速器
2)齿宽较大,齿根弧度增大,减少发生断裂失效 的风险; 3)由于所需柔轮变形量较小,可使柔轮的寿命得
曲⑨
LHS/LHSG—CL—III系,0轻量型谐波减速器 三组件型谐波减速嚣
arcsec;
绿的谐波所有谐波减速器出厂时的背隙均≤10 arcsec(绝大部分产品为0背隙);结合国内市场的实 际情况,免费为客户根据伺服电机输m轴尺寸定制波发 生器输入轴孑L;免费向客户提供输入、输出端密封用0 型圈和润滑脂;常规产品的交货周期不超过一个月。
四、技术优势 1.对谐波减速齿轮啮合原理的独到认识 公司跳出了传统上以willis定理v¨:。:o为基础
到极大提高; 4)多达20%~30%的齿参与啮合,齿面比压较小。 3.性能参数优势
绿的谐波生产的谐波减速器除具有高精度、高可靠
性、大扭矩、大速比、小体积、长寿命等特性外,与国 内外同类型产品比较,还具备以下优势: 1)承载扭矩大幅提升,是国内同类产品2倍以上, 极限载荷优于国外产品; 2)体积小、重量轻,体积是国内同类产品1/2以下; 3)高效率、低背隙,可实现零误差精确传动,所 有产品出厂时的背隙≤lO aresec(绝大部分产品均为。 背隙),空程误差≤40
囝j。参
LHS/LHSG系列礼帽形谐波减速器LHD系列超扁平谐波减速器
Robot
Technique and AppIicalion2014 3“P型齿”克服了谐波啮合齿形的缺点,通过一系 列创新性的设计,可极大提高柔轮的使用寿命,与国外 同类产品齿形比较,绿的谐波的产品有以下优点:
谐波齿轮的结构组成及工作原理

谐波齿轮是一种新型的传动机构,因其结构独特、工作原理先进而备受瞩目。
本文将从谐波齿轮的结构组成及工作原理两个方面进行介绍,帮助读者更好地了解谐波齿轮的特点和应用领域。
一、谐波齿轮的结构组成1. 主轴部分谐波齿轮的主轴部分通常由谐波波发生器、柔性轴和静止波发生器组成。
谐波波发生器是用于产生谐波运动的部件,它与柔性轴紧密连接,能够将谐波波传递给静止波发生器。
静止波发生器的作用是将谐波转化为旋转运动,从而驱动输出轴工作。
2. 输出轴部分输出轴部分包括输出轴、柔性轴和输出轴的定位结构。
柔性轴在谐波齿轮中起到传递力矩和减小震动的作用,能够有效保护输出轴和传动系统。
输出轴的定位结构则保证了输出轴的稳定性和精度。
3. 其他部分谐波齿轮通常还包括壳体、轴承、密封件等辅助部件。
壳体是整个传动系统的保护罩,能够阻挡外部污染物和颗粒,保护内部部件。
轴承和密封件则起到支撑和密封作用,确保谐波齿轮的正常运转和使用寿命。
二、谐波齿轮的工作原理1. 谐波波发生器的作用谐波波发生器是谐波齿轮的核心部件,它通过弹性变形产生谐波振动,将谐波能量传递给静止波发生器。
谐波波发生器通常采用柔性材料制成,其内部结构设计合理,能够确保谐波波的准确产生和传递。
2. 静止波发生器的作用静止波发生器接收谐波波发生器传递过来的谐波能量,通过内部结构的设计和转动运动,将谐波转化为旋转运动。
静止波发生器的设计和加工精度对谐波齿轮的工作效率和精度影响很大,因此在制造过程中需要高度重视。
3. 输出轴的工作原理输出轴是谐波齿轮将谐波运动转化为实际工作输出的部件,它通过接收静止波发生器传递过来的旋转运动,实现输出轴的旋转。
输出轴的设计和加工精度直接影响着谐波齿轮的输出精度和工作效率,因此在制造过程中需要严格控制。
4. 谐波齿轮的优点谐波齿轮相比传统的齿轮传动具有以下几个优点:传动比大、传动效率高、噪音小、结构紧凑、重量轻、精度高等。
这些优点使谐波齿轮在各种精密传动系统中得到广泛应用,例如工业机械、航天航空、机器人、医疗设备等领域。
三波谐波摩擦传动超声波电动机理论研究

sr e . h ntew rigp n il fteh r ncf cind v sa aye n ef xpiewaeom a dtetae t— c b d T e h okn r cpeo amo i r t r ewa n lzda dt e sl vfr n rjeo i i h i o i h l n h
三
主要结 构 为刚轮 、 轮和 超声波 波发 生器 , 图 1所 波 柔 如
谐 摩 传
动 超 声 电 机
理
示 。超声 波波发 生器 由双 锥 面齿行 波超声 波 电动机 波 和 布置在 其外 圆周 上 的三个滚 动体 组成 。相对 于双 擦 波谐 波传 动 , 波谐 波传 动具 有接触 时接触 面 积大 、 三
式 中 : 为柔轮 中性 面 的等效 半径 。 r
第二 阶段 : 线元从 0b 移至 口b, 向位 移 由 ,: 2 。 切
图 1 谐 波 摩擦 超 声 波 电 动机 结 构
变为 v d , + v 线元增 量 :
a b —ab ( +d )一 =d ll 22 v
2谐波摩擦超声 波电动机的理论研究
论 研 究
因加工 和装 配误 差使柔 轮 与刚轮 接触 不到或 接触过 紧 。另 外 , 动体 相 对定 子轴 同心 度 的误 差 补偿 依 滚
一
歹 玛 研 ■
… … E 5 … … … … … … … … … … … … … … … … … … … … … … … … …
2 1谐波摩 擦传动原 理 . 谐 波摩擦 传动是 在谐 波齿轮传 动理论基 础上提 出的利 用摩擦 力进 行运 动 和 动力 传 递 的传 动方 式 。 谐 波摩擦 传动将 谐 波传 动 和摩 擦 传 动结 合起 来 , 把 柔 轮和 刚轮作成 光 滑表 面 , 轮和 刚 轮过 盈 配合 产 柔
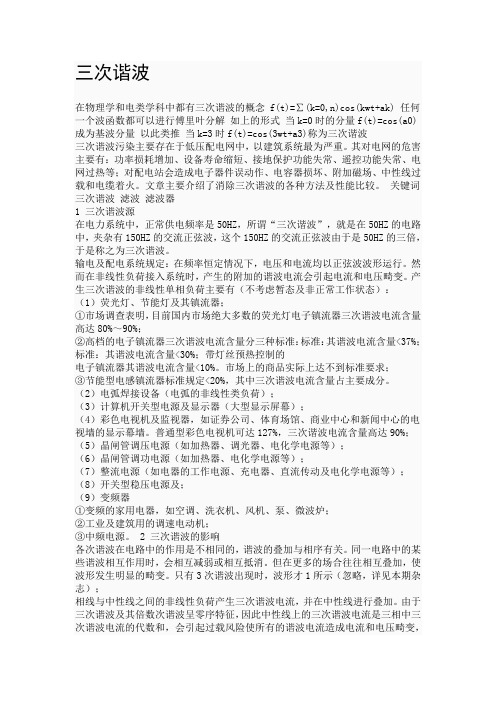
三次谐波

当电力系统稳态运行时,其主要是奇次谐波,而没有偶次谐波,其原因何在?这里我们暂不从整流装置、电弧炉、牵引机车等的非线性来讨论,而主要讨论变压器的非线性以及变压器的接线方式引起的谐波种类。
变压器的励磁回路实质上就是具有铁芯线圈的电路。
在不计磁滞和铁芯未饱和时,它基本上是线性电路,铁芯饱和后,它就是非线性的,使励磁电流产生畸变,饱和程度愈深,电流畸变愈严重。
此时电流波形正、负半波相同,是半波对称的,则电流中只含有奇次谐波,其中主要是三次谐波。
当计及磁滞的影响时,铁芯磁化曲线变为上升和下降两条曲线,而不是一条曲线,电流波形出现扭曲,但电流波形还是对称的,所以它也只含有奇次谐波。
一般变压器往往有一侧接成三角形接线,零性谐波电流将在其中流通而不能进入电力系统,而三次谐波其实类似于零序,因为各相三次谐波电流是同相位的,因而三相变压器的谐波电流类似于六脉动整流回路,主要是(6k±1)次谐波,其中又以5、7次谐波为主要分量。
一些大型变压器由于三相磁路不对称,也有部分零序性谐波电流流入电力系统中。
因此,电力系统谐波源产生的谐波一般为奇次谐波,且5、7次谐波所占的比重量大,它们对电力系统的正常运行造成严重危害。
3次谐波含量一般情况下不是很大,但在有电弧炉或电力机车的电网中3次谐波较大(电极反复操作以及炉料在熔化过程中的崩落和滑动,使得三相谐波电流严重不平衡,即使电弧炉变压器有一侧是三角形接线,也不能阻止零序性的谐波电流注入电网,其也产生很大的偶次谐波,这是负载特性导致,不是电力系统本身引起),在选择并联电容器支路的串联电抗器电抗率时应引起注意,避免发生并联谐振和谐波严重放大现象1三次谐波源输电及配电系统规定:在频率恒定情况下,电压和电流均以正弦波波形运行。
然而在非线性负荷接入系统时,产生的附加的谐波电流会引起电流和电压畸变。
产生三次谐波的非线性单相负荷主要有(不考虑暂态及非正常工作状态):(1)荧光灯、节能灯及其镇流器;①市场调查表明,目前国内市场绝大多数的荧光灯电子镇流器三次谐波电流含量高达80%~90%;②高档的电子镇流器三次谐波电流含量分三种标准:L标准:其谐波电流含量<37%;H标准:其谐波电流含量<30%;带灯丝预热控制的电子镇流器其谐波电流含量<10%。
谐波齿轮传动原理和技术

63V OCATIONAL TECHNOLOGY z yj 技术课堂谐波齿轮传动原理和技术黑龙江王中孚吴广林李洪斌张敏于兴胜职业技术一、谐波齿轮传动的原理谐波齿轮传动由三个基本构件组成:波发生器H 、作为挠性构件的柔轮1和刚轮2。
在未装配之前,柔轮的原始剖面呈圆形;刚轮是一个刚性的内齿轮,柔轮的齿数Z1比刚轮齿数Z2少1至几个齿;波发生器H 由一个椭圆盘,也可由转臂和几个圆盘构成等多种形式,通常有标准椭圆、双偏心圆、余弦闭合曲线、里隆勒曲线(Resal)、偏心盘作用下的和滚轮发生器作用下的闭合曲线等。
波发生器的最大直径比柔轮内径略大。
把波发生器装入柔轮时,迫使柔轮产生变形,在其长轴两端的齿轮恰好与刚轮齿完全啮合,短轴处的齿侧完全脱开。
而处于波发生器长轴和短轴之间沿周长不同区域内的齿,视柔轮回转方向的不同,则处于某些啮合或某些啮合的不同过渡状态,当波发生器回转时,柔轮的长轴和短轴的位置不断改变,这样由波发生器控制的柔轮变形部位随转角φ的不同而改变,从而传递了啮合运动。
在传动的过程中,波发生器转一周,柔轮上某点变形的循环次数称为波数。
如以椭圆形波发生器传递啮合时为例,变形后柔轮上各点相对于未变形柔轮的运动,在以变形长轴为起点展开后,近似呈具有两个全波的余弦曲线的连续简谐波形,称为双波传动。
其余类推,有单波、三波,考虑到柔轮的疲劳寿命,一般波数不大于三,双波是最常用的。
一般情况下,有一个输入运动时,能获得一个确定的输出运动。
在三个构件中,必须有一个固定的,即所谓的行星型机构,三个构件中其余两个一个若为主动,另一个即为从动。
其相互关系根据需要可以互换,有时为了满足某种使用要求,亦可做成三个构件均不固定的差动型的机构,以用于将两个输入运动合成一个确定的输出运动,或将一个输入运动分解为两个不确定的输出运动。
同时,当刚轮固定,波发生器主动,而柔轮从动时,由相对运动原理不难证明,柔轮中线上任一点的轨迹近似呈内摆线,且柔轮转向与波发生器的转向相反;而当柔轮固定,刚轮从动时,波发生器的转向与刚轮的转向相同。
三次谐波(参考)
三次谐波在物理学和电类学科中都有三次谐波的概念f(t)=∑(k=0,n)cos(kwt+ak) 任何一个波函数都可以进行傅里叶分解如上的形式当k=0时的分量f(t)=cos(a0)成为基波分量以此类推当k=3时f(t)=cos(3wt+a3)称为三次谐波三次谐波污染主要存在于低压配电网中,以建筑系统最为严重。
其对电网的危害主要有:功率损耗增加、设备寿命缩短、接地保护功能失常、遥控功能失常、电网过热等;对配电站会造成电子器件误动作、电容器损坏、附加磁场、中性线过载和电缆着火。
文章主要介绍了消除三次谐波的各种方法及性能比较。
关键词三次谐波滤波滤波器1 三次谐波源在电力系统中,正常供电频率是50HZ,所谓“三次谐波”,就是在50HZ的电路中,夹杂有150HZ的交流正弦波,这个150HZ的交流正弦波由于是50HZ的三倍,于是称之为三次谐波。
输电及配电系统规定:在频率恒定情况下,电压和电流均以正弦波波形运行。
然而在非线性负荷接入系统时,产生的附加的谐波电流会引起电流和电压畸变。
产生三次谐波的非线性单相负荷主要有(不考虑暂态及非正常工作状态):(1)荧光灯、节能灯及其镇流器;①市场调查表明,目前国内市场绝大多数的荧光灯电子镇流器三次谐波电流含量高达80%~90%;②高档的电子镇流器三次谐波电流含量分三种标准:标准:其谐波电流含量<37%;标准:其谐波电流含量<30%;带灯丝预热控制的电子镇流器其谐波电流含量<10%。
市场上的商品实际上达不到标准要求;③节能型电感镇流器标准规定<20%,其中三次谐波电流含量占主要成分。
(2)电弧焊接设备(电弧的非线性类负荷);(3)计算机开关型电源及显示器(大型显示屏幕);(4)彩色电视机及监视器,如证券公司、体育场馆、商业中心和新闻中心的电视墙的显示幕墙。
普通型彩色电视机可达127%,三次谐波电流含量高达90%;(5)晶闸管调压电源(如加热器、调光器、电化学电源等);(6)晶闸管调功电源(如加热器、电化学电源等);(7)整流电源(如电器的工作电源、充电器、直流传动及电化学电源等);(8)开关型稳压电源及;(9)变频器①变频的家用电器,如空调、洗衣机、风机、泵、微波炉;②工业及建筑用的调速电动机;③中频电源。
谐波传动减速器技术指标
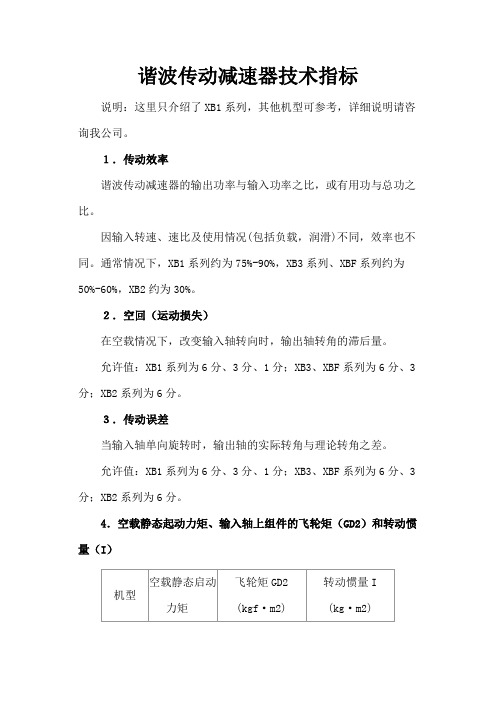
谐波传动减速器技术指标说明:这里只介绍了XB1系列,其他机型可参考,详细说明请咨询我公司。
1.传动效率谐波传动减速器的输出功率与输入功率之比,或有用功与总功之比。
因输入转速、速比及使用情况(包括负载,润滑)不同,效率也不同。
通常情况下,XB1系列约为75%-90%,XB3系列、XBF系列约为50%-60%,XB2约为30%。
2.空回(运动损失)在空载情况下,改变输入轴转向时,输出轴转角的滞后量。
允许值:XB1系列为6分、3分、1分;XB3、XBF系列为6分、3分;XB2系列为6分。
3.传动误差当输入轴单向旋转时,输出轴的实际转角与理论转角之差。
允许值:XB1系列为6分、3分、1分;XB3、XBF系列为6分、3分;XB2系列为6分。
4.空载静态起动力矩、输入轴上组件的飞轮矩(GD2)和转动惯量(I)机型空载静态启动力矩飞轮矩GD2(kgf·m2)转动惯量I(kg·m2)5.平均寿命谐波传动减速器的寿命主要取决于波发生器轴承的寿命.在额定负载下,输入轴转速为1500转/分钟时,柔性轴承寿命不低于5000小时,平均工作寿命大于10000小时。
6.超载能力允许在启动、停止瞬间超载一倍,工作时允许瞬间超载不大于1.5倍。
7.扭转刚度输入轴固定,在输出轴上负载扭矩与相应扭转角之增量比值。
注:KA-含空回及在约20%额定扭矩时,输出轴弹性变形的扭转刚度系数KB-在此以后,当输出轴上的扭矩加到额定扭矩时,产生弹性变形的扭转刚度系数。
单位:kgf·cm/rad注:上表指减速器整机测试数据,三大件的扭转刚度比整机约高一倍以上。
谐波传动减速器工艺装配1、安装前全部零件清洗干净。
2、安装时先将波发生器装入柔轮,然后边转动波发生器,边将带有波发生器的柔轮,装入刚轮。
3、拆卸的程序与安装时相反。
但拆卸时,必须保证刚轮轮啮无偏斜地与柔轮啮脱开,它们的变形或啮面擦伤。
4、柔轮装入刚轮中时,检查轮啮啮合是否对称,短轴上间隙应相等,即A1=A2,如下图5、安装前,组件内所有零件表面都应涂敷00#半流体润滑脂或润滑油。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
三波谐波传动 按住↑键可连续播放动画
参赛专用版
国防科大潘存云教授研制
按Esc键返回
三波谐波传动 按住↑键可连续播放动画
参赛专用版
国防科大潘存云教授研制
按Esc键返回
三波谐波传动 按住↑键可连续播放动画
参赛专用版
国防科大潘存云教授研制
按Esc键返回
三波谐波传动 按住↑键可连续播放动画
参赛专用版
国防科大潘存云教授研制
参赛专用版
国防科大潘存云教授研制
按Esc键返回
三波谐波传动 按住↑键可连续播放动画
参赛专用版
国防科大潘存云教授研制
按Esc键返回
三波谐波传动 按住↑键可连续播放动画
参赛专用版
国防科大潘存云教授研制
按Esc键返回
三波谐波传动 按住↑键可连续播放动画
参赛专用版
国防科大潘存云教授研制
按Esc键返回
按Esc键返回
三波谐波传动 按住↑键可连续播放动画
参赛专用版
国防科大潘存云教授研制
按Esc键返回
三波谐波传动 按住↑键可连续播放动画
参赛专用版
国防科大潘存云教授研制
按Esc键返回
三波谐波传动 按住↑键可连续播放动画
参赛专用版
国防科大潘存云教授研制
按Esc键返回
三波谐波传动 按住↑键可连续播放动画
按Esc键返回
三波谐波传动 按住↑键可连续播放动画
参赛专用版
国防科大潘存云教授研制
三波谐波传动 按住↑键可连续播放动画
参赛专用版
国防科大潘存云教授研制
按Esc键返回
三波谐波传动 按住↑键可连续播放动画
参赛专用版
国防科大潘存云教授研制
按Esc键返回
三波谐波传动 按住↑键可连续播放动画
参赛专用版
国防科大潘存云教授续播放动画
参赛专用版
国防科大潘存云教授研制
参赛专用版
国防科大潘存云教授研制
按Esc键返回
三波谐波传动 按住↑键可连续播放动画
参赛专用版
国防科大潘存云教授研制
按Esc键返回
三波谐波传动 按住↑键可连续播放动画
参赛专用版
国防科大潘存云教授研制
按Esc键返回
三波谐波传动 按住↑键可连续播放动画
参赛专用版
国防科大潘存云教授研制
按Esc键返回
按Esc键返回
三波谐波传动 按住↑键可连续播放动画
参赛专用版
国防科大潘存云教授研制
按Esc键返回
三波谐波传动 按住↑键可连续播放动画
参赛专用版
国防科大潘存云教授研制
按Esc键返回
三波谐波传动 按住↑键可连续播放动画
参赛专用版
国防科大潘存云教授研制
按Esc键返回
三波谐波传动 按住↑键可连续播放动画