五轴铣床运动链设计与构型综合
五轴联动机床的结构性能分析与设计探讨

五轴联动机床的结构性能分析与设计探讨1五轴联动机床简介五轴联动机床(5-axis CNC machine)是由以水平方向运动的数控五轴联动机械组成的机床。
它能够根据用户提供的工艺要求,在复杂的立体坐标空间中进行加工,从而节省加工时间,提高产品的精度。
五轴联动机床可以实现与立体坐标空间相关的各种复杂的圆弧和曲线的切削,并且特别适用于进行螺旋形曲线加工。
2结构特点五轴联动机床包括X、Y、Z、A、B五轴,A、B轴是在与X、Y、Z 轴成六边形结构的组合机架上安装的可移动且可自由旋转的垂直轴。
通过多轴联动加工,使硬件设备能够实现六轴以上机床的效果,大大改善了加工时间、加工效率和加工精度。
它还可以在相同的座标系中控制转轴的进给和结构体的旋转,从而消除了坐标死角问题。
3性能分析五轴联动机床的优点是加工精度高,可以在复杂的立体坐标空间中进行高精度的加工;它可以实现多轴联动加工,从而极大地改善了加工时间和效率;同时,它能够在统一的座标系内控制转轴进给和结构体旋转,有效消除坐标死角带来的问题。
4设计探讨五轴联动机床的设计着重于提高工件表面的精度,实现多轴的坐标联动,消除加工中的坐标死角问题。
具体到设计上,要详细分析物料的结构特征以及工艺要求,明确表面处理要求、加工参数,以确定联动轴之间旋转关系。
在总体设计上,要充分考虑到机床应有的节能减振、智能控制、定位准确等特性,实现机床系统自动化、智能化等。
5结论五轴联动机床是智能化、多轴高精度加工设备,能够有效地改善传统机床的加工方式,提高产品的精度和效率,为保证最大的生产效率添加了用于精密加工的全新工具。
因此,五轴联动机床在未来产品的加工中具有重要的作用,将成为制造业的发展的新趋势。
五轴联动数控雕刻机结构设计

五轴联动数控雕刻机结构设计在数控雕刻机的设计中,五轴联动结构是目前较为常见的设计方案之一。
它可以实现对工件的多角度切削和精细加工,广泛应用于各种工业生产领域。
本文将主要介绍五轴联动数控雕刻机的结构设计和相关技术。
五轴联动数控雕刻机是一种高精度的加工设备,它可以在三维空间内沿着任意轴线进行加工,具有以下特点:1.高精度:五轴联动数控雕刻机具有较高的机床刚性和运动精度,可以保证加工精度和表面质量。
2.高效率:五轴联动数控雕刻机可以在一次装夹的情况下完成多个加工面,提高了生产效率。
3.广泛适用:五轴联动数控雕刻机可以加工各种难加工的工件,如曲面、复杂零件等。
4.易于操作:五轴联动数控雕刻机采用计算机控制和程序编写,具有灵活性和易操作性。
1.机床底座:机床底座是整个数控雕刻机的主要承重部分,它需要具有足够的刚性和稳定性,以保证加工精度和表面质量。
底座材料通常为优质铸铁、钢铁等。
2.主轴箱体:主轴箱体是数控雕刻机的核心部分,它包括主轴、伺服电机、减速器等部分。
主轴箱体需要具有较大的承载能力和刚性,以能够承受高速转动的主轴和高速切削力。
3.工作台:工作台是安装工件的平台,它需要具有足够的刚性和平整度,以保证工件的精确定位和加工精度。
在五轴联动数控雕刻机中,工作台可以沿着X、Y、Z三个方向移动,并且可以绕着A、C两个轴旋转。
4.五轴联动部分:五轴联动部分是数控雕刻机的核心部分,它由数控系统控制,可以实现对工件的多角度切削和精细加工。
五轴联动部分通常包括A轴、C轴、AB轴、BC轴等各个轴的伺服电机、减速器、轴承等部分。
5.数控系统:数控系统是五轴联动数控雕刻机的控制核心,它负责控制机床各个部分的运动和加工过程。
数控系统通常由计算机、控制卡、数控软件等部分组成,可以直接对加工程序进行编程和调整。
五轴联动数控雕刻机的工作原理是由数控系统对五个轴的运动进行控制,从而实现对工件的多角度切削和精细加工。
具体工作流程如下:1.准备工作:将工件固定在工作台上,并进行定位、检测等工作。
五轴联动数控机床简单介绍

混联结构机床
五轴联动机床的应用
1、加工复杂空间曲面的产品零件
2、大型复杂结构件的高效率加工
3、复杂多面体带孔结构件的高生产率加工
4、在模具制造业,取代电火花(EMD)加工的常用方法。
电极加工和模具加工之后的补充加工,其工作量要占到模具生产周期的30%~65%。采 用高速5轴数控机床加工,可快速实现模具加工,不需制造电极与大量的补充加工,有 效缩短补充加工生产周期,明显降低生产成本。
数控机床中的坐标系
横式:
+X +Z
立式:
机床结构类型
传统(串连)结构
五个运动全在刀具侧
A11
五个运动全在工件侧
A12
五个运动分配在刀具和工件侧 A13(A,B,C)
并联结构
并联机床结构
串、并(混)联结构 混联结构
A11型
X
Z
C
A
Y
返回
A12型
C B
X Z
Y
返回
Hale Waihona Puke 13型A13型也是传统结构的机床,但五个坐标运动分别配置在刀具一 侧和工件一侧来完成。
谢谢观看!
我国在数控机床领域面临的挑战
1、加大研发资金投入力度,加大加强基础理论研究,为设备研究做 好理论准备。
2、研究外国先进设备技术,深研其中的核心知识。在仿照的基础上 进行创新。
3、研究国内外五轴联动技术的发展方向,做到先人一步开展研发。 4、了解国内外各个用户群体的需要,开发出适合不同用户需要的设 备。
主要内容
•五轴联动的基本意义 •坐标系的定义 •机床结构类型 •五轴联动数控机床的应用 •五轴联动数控机床的发展前景 •我国在数控机床领域面临的挑战 •小结
机械制造及自动化专业外文翻译--五轴磨床加工工具运动链的设计和分析
中文译文:E.L.J. Bohez,设计与制造工程部门,亚洲技术研究所摘要:五轴CNC加工中心现在应用得非常广泛。
大多数机器的运动学原理都是以直角笛卡儿坐标系统为基础的。
这篇文章对有可能的概念上的设计和基于理论上有可能的自由度的结合并且真实存在的器械进行了分类。
本文还定义了一些有用的定量参数,例如:工作空间利用因素、机器加工工具的空间利用率、方位空间的指标和方位角。
同时还分析了不同概念的优缺点,给出了选择的标准和机器结构的设计。
最近在工业中提出的一些基于斯图尔特平台的概念也将在这篇文章中进行简要的论述。
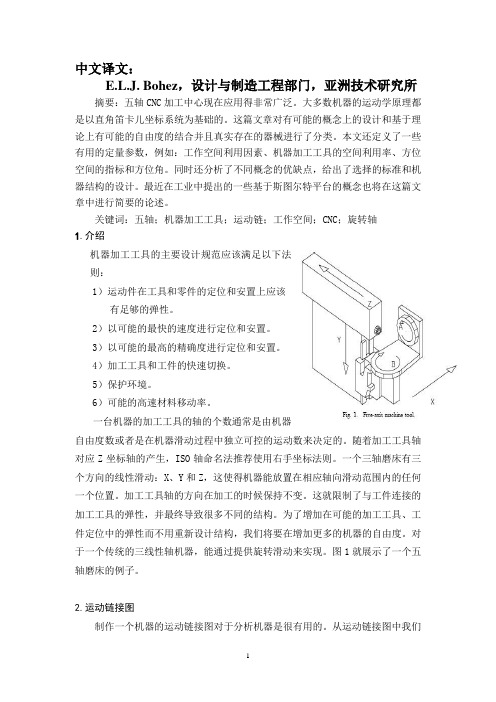
关键词:五轴;机器加工工具;运动链;工作空间;CNC;旋转轴1.介绍机器加工工具的主要设计规范应该满足以下法则:1)运动件在工具和零件的定位和安置上应该有足够的弹性。
2)以可能的最快的速度进行定位和安置。
3)以可能的最高的精确度进行定位和安置。
4)加工工具和工件的快速切换。
5)保护环境。
6)可能的高速材料移动率。
一台机器的加工工具的轴的个数通常是由机器自由度数或者是在机器滑动过程中独立可控的运动数来决定的。
随着加工工具轴对应Z坐标轴的产生,ISO轴命名法推荐使用右手坐标法则。
一个三轴磨床有三个方向的线性滑动:X、Y和Z,这使得机器能放置在相应轴向滑动范围内的任何一个位置。
加工工具轴的方向在加工的时候保持不变。
这就限制了与工件连接的加工工具的弹性,并最终导致很多不同的结构。
为了增加在可能的加工工具、工件定位中的弹性而不用重新设计结构,我们将要在增加更多的机器的自由度。
对于一个传统的三线性轴机器,能通过提供旋转滑动来实现。
图1就展示了一个五轴磨床的例子。
2.运动链接图制作一个机器的运动链接图对于分析机器是很有用的。
从运动链接图中我们可以很快区别两组轴:图2展示了在图1中五轴磨床的运动链接图。
从图中我们可以看到,工件由四根轴运载,而加工工具只由一根轴运载。
五轴机器就像两个相互协作的机器人,一个机器人运载工件,另一个机器人则运载加工工具。
五轴联动立式加工中心结构设计
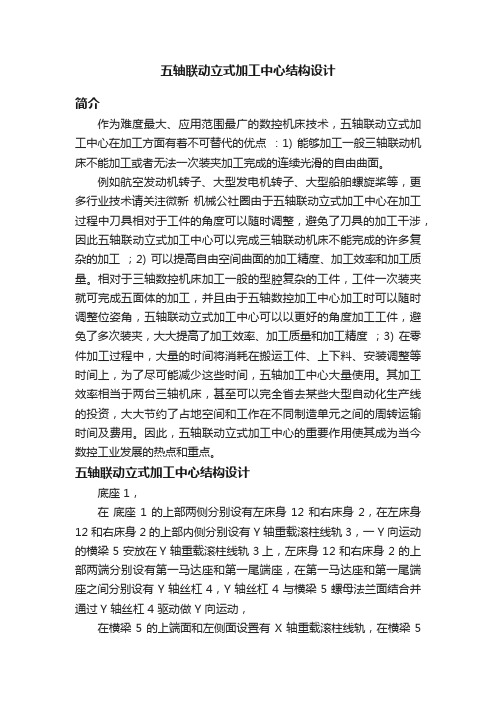
五轴联动立式加工中心结构设计简介作为难度最大、应用范围最广的数控机床技术,五轴联动立式加工中心在加工方面有着不可替代的优点:1) 能够加工一般三轴联动机床不能加工或者无法一次装夹加工完成的连续光滑的自由曲面。
例如航空发动机转子、大型发电机转子、大型船舶螺旋桨等,更多行业技术请关注微新机械公社圈由于五轴联动立式加工中心在加工过程中刀具相对于工件的角度可以随时调整,避免了刀具的加工干涉,因此五轴联动立式加工中心可以完成三轴联动机床不能完成的许多复杂的加工;2) 可以提高自由空间曲面的加工精度、加工效率和加工质量。
相对于三轴数控机床加工一般的型腔复杂的工件,工件一次装夹就可完成五面体的加工,并且由于五轴数控加工中心加工时可以随时调整位姿角,五轴联动立式加工中心可以以更好的角度加工工件,避免了多次装夹,大大提高了加工效率、加工质量和加工精度;3) 在零件加工过程中,大量的时间将消耗在搬运工件、上下料、安装调整等时间上,为了尽可能减少这些时间,五轴加工中心大量使用。
其加工效率相当于两台三轴机床,甚至可以完全省去某些大型自动化生产线的投资,大大节约了占地空间和工作在不同制造单元之间的周转运输时间及费用。
因此,五轴联动立式加工中心的重要作用使其成为当今数控工业发展的热点和重点。
五轴联动立式加工中心结构设计底座 1,在底座 1 的上部两侧分别设有左床身 12 和右床身 2,在左床身12 和右床身 2 的上部内侧分别设有 Y 轴重载滚柱线轨 3,一 Y 向运动的横梁 5 安放在Y 轴重载滚柱线轨 3上,左床身 12 和右床身 2 的上部两端分别设有第一马达座和第一尾端座,在第一马达座和第一尾端座之间分别设有 Y 轴丝杠 4,Y 轴丝杠 4 与横梁 5 螺母法兰面结合并通过Y 轴丝杠 4 驱动做 Y 向运动,在横梁 5 的上端面和左侧面设置有 X 轴重载滚柱线轨,在横梁 5的 X 轴重载滚柱线轨 7 上设有可 X 向运动的滑座 11,横梁 5 的左侧斜面上安装有第二马达座,横梁5 的右侧侧斜面上安装有第二尾端座,第二马达座和第二尾端座之间安装有 X 轴丝杠 8, X 轴丝杠 8 与滑座11 的底部螺母法兰面结合并通过X 轴丝杠 8 驱动做做 X 向运动,滑座 11 的内侧侧面上设置有Z 轴重载滚柱线轨 10,滑座 11 的前端上部安装有第三马达座,下部安装有第三尾端座,第三马达座和第三尾端座之间设有 Z 轴丝杠 15,Z 轴丝杠 15 与一机头 9 右侧螺母法兰面结合并通过Z 轴丝杠 15 驱动做 Z 向运动,机头 9 内的主轴孔内装有可高速旋转的电主轴 6,机头 9 的上端安装有气缸导向板 18,滑座 11 的上端安装气缸支撑板17,气缸固定板 17 上安装有气缸 16,右床身 2 和左床身 12 之间安装有带高动态特性力矩电机的双轴转台 14,底座 1 的后部且在右床身2 和左床身 12 之间的空腔内安放有刀库 13。
五轴理论讲解
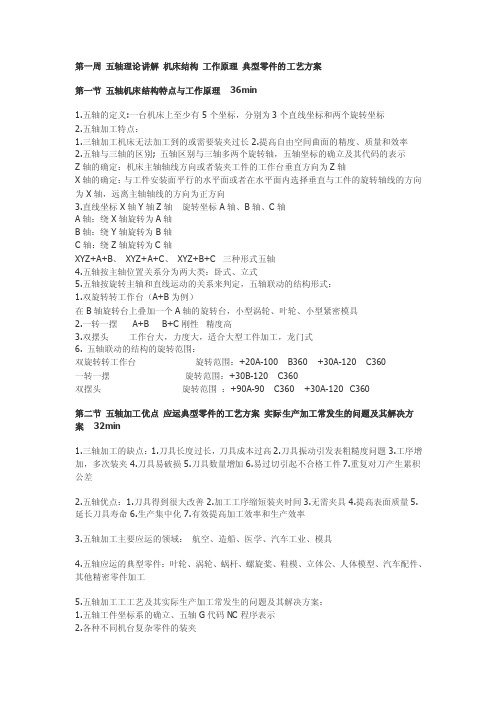
第一周五轴理论讲解机床结构工作原理典型零件的工艺方案第一节五轴机床结构特点与工作原理36min1.五轴的定义:一台机床上至少有5个坐标,分别为3个直线坐标和两个旋转坐标2.五轴加工特点:1.三轴加工机床无法加工到的或需要装夹过长2.提高自由空间曲面的精度、质量和效率2.五轴与三轴的区别; 五轴区别与三轴多两个旋转轴,五轴坐标的确立及其代码的表示Z轴的确定:机床主轴轴线方向或者装夹工件的工作台垂直方向为Z轴X轴的确定:与工件安装面平行的水平面或者在水平面内选择垂直与工件的旋转轴线的方向为X轴,远离主轴轴线的方向为正方向3.直线坐标X轴Y轴Z轴旋转坐标A轴、B轴、C轴A轴:绕X轴旋转为A轴B轴:绕Y轴旋转为B轴C轴:绕Z轴旋转为C轴XYZ+A+B、XYZ+A+C、XYZ+B+C 三种形式五轴4.五轴按主轴位置关系分为两大类:卧式、立式5.五轴按旋转主轴和直线运动的关系来判定,五轴联动的结构形式:1.双旋转转工作台(A+B为例)在B轴旋转台上叠加一个A轴的旋转台,小型涡轮、叶轮、小型紧密模具2.一转一摆A+B B+C刚性精度高3.双摆头工作台大,力度大,适合大型工件加工,龙门式6. 五轴联动的结构的旋转范围:双旋转转工作台旋转范围:+20A-100 B360 +30A-120 C360一转一摆旋转范围:+30B-120 C360双摆头旋转范围:+90A-90 C360 +30A-120 C360第二节五轴加工优点应运典型零件的工艺方案实际生产加工常发生的问题及其解决方案32min1.三轴加工的缺点:1.刀具长度过长,刀具成本过高2.刀具振动引发表粗糙度问题3.工序增加,多次装夹4.刀具易破损5.刀具数量增加6.易过切引起不合格工件7.重复对刀产生累积公差2.五轴优点:1.刀具得到很大改善2.加工工序缩短装夹时间3.无需夹具4.提高表面质量5.延长刀具寿命6.生产集中化7.有效提高加工效率和生产效率3.五轴加工主要应运的领域:航空、造船、医学、汽车工业、模具4.五轴应运的典型零件:叶轮、涡轮、蜗杆、螺旋桨、鞋模、立体公、人体模型、汽车配件、其他精密零件加工5.五轴加工工工艺及其实际生产加工常发生的问题及其解决方案:1.五轴工件坐标系的确立、五轴G代码NC程序表示2.各种不同机台复杂零件的装夹3.加工辅助线、辅助面的制作4.五轴加工刀具与工件点接触,非刀轴中心的补偿5.加工过程中刀具碰撞问题6.刀轨的校验及其仿真加工7.不同五轴机器,不同刀轨和后处理第二周结合案例讲解软件的综合使用技巧和UG7.5新增功能的使用第三节案例1 五轴加工坐标与刀具补偿装夹及其UG7.5多轴驱动的讲解116min1.五轴坐标的设定:五轴坐标系一般情况下设在工作台回转中心上2.UG7.5中工件坐标系讲解:刀轴矢量、3轴半开粗、多轴面铣加工1.局部坐标系设定G52使用举例格式:G52 X_Y_Z_;式中:X 、Y、 Z:五轴加工机床局部坐标系原点在当前工件坐标系中的坐标值。
五轴数控加工平台结构设计和分析

编号南京航空航天大学毕业设计题目五轴数控加工平台结构设计与分析学生姓名马越民学号*********学院机电学院专业机械工程及自动化班级0511101指导教师刘凯副教授二〇一四年六月南京航空航天大学本科毕业设计(论文)诚信承诺书本人郑重声明:所呈交的毕业设计(论文)(题目:五轴数控加工平台结构设计与分析)是本人在导师的指导下独立进行研究所取得的成果。
尽本人所知,除了毕业设计(论文)中特别加以标注引用的内容外,本毕业设计(论文)不包含任何其他个人或集体已经发表或撰写的成果作品。
作者签名:年月日(学号):五轴数控加工平台结构设计与分析摘要五轴联动数控加工技术是目前解决叶轮、叶片和曲轴等复杂曲面零件加工的唯一手段,这种加工方式以其特有的优越性在复杂曲面加工、高精度零件加工方面起着越来越重要的作用,然而我国的五轴联动数控加工技术还有待突破。
本次课题要求设计五轴数控运动平台的具体机械结构,基于运动控制卡搭建控制系统,实现五轴数控加工。
即先了解五轴数控机床的结构类型,并通过比较分析,选择合适的结构类型;然后从标准件开始,经过计算、选型和校核等步骤确定出标准件的尺寸参数,紧接着确定连接和支撑它们非标准件的尺寸参数;其次利用UG8.0搭建五轴数控加工机床的立体模型,从单个零件的生成开始,到基本组件的建立和加工平台的装配,直到加工平台的三维模型最终建立;最后导出工程图,利用AutoCAD修改并标注。
关键词双摆头,五轴联动,加工平台,运动控制The design of five-Axis CNC platformAbstractFive axis NC machining technology is currently dealing with the key technology of complex curve surface machining and high precision parts processing, and its importance is self-evident, and the current our country in these areas still awaiting a breakthrough.This research requires that the mechanical structure of the five axis CNC machining platform is designed, and the 3D drawing software is used to build the model and draw the 2D engineering graphics of the assembly and parts.. This requires first from the study of five axis NC platform of mechanical structure types, analysis and comparison of the advantages and disadvantages of different structure types, choose suitable type of structure and mechanical structure design; specific design first from standard parts of the calculation and selection began, when the dimension parameter of standard parts, you can connecting parts of connecting and supporting non standard size and structure design; when the various parts of the structure and size, using UG to build the 3D model of the design of five axis linkage CNC platform. First from the individual parts, and assembly the basic components and the gradual completion of the assembly of the processing platform, and finally the formation of the three-dimensional structure of the complete CNC platform; 3D modelis built after the completion of using AutoCAD 2D engineering drawing and dimensioning.Finally ,finish the graduation thesis.Keywords five axis linkage; structure design; double turntable structure; motion control目录摘要 (i)Abstract (ii)第一章引言............................................................... - 1 -1.1 对五轴数控加工平台的认识........................................... - 1 -1.1.1 发展现状..................................................... - 1 -1.1.2 发展趋势..................................................... - 1 -1.1.3 研究意义..................................................... - 2 -1.2 毕业设计工作内容................................................... - 2 - 第二章五轴联动数控加工平台总体方案设计................................... - 4 -2.1 五轴数控加工平台结构形式及特点..................................... - 4 -2.1.1 双摆头结构................................................... - 4 -2.1.2 双转台结构................................................... - 4 -2.1.3头摆工作台旋转................................................ - 5 -2.2 总体设计思路及步骤................................................. - 5 -2.2.1 总体设计思路................................................. - 5 -2.2.2 基本设计步骤................................................. - 6 - 第三章直线运动机械结构设计............................................... - 7 -3.1直线运动机械结构方案配置........................................... - 7 -3.2 直线导轨计算、选型与校核........................................... - 7 -3.2.1 导轨副类型的选用............................................. - 7 -3.2.1 导轨副载荷的计算与型号的选取................................. - 8 -3.2.3 距离寿命计算与校核.......................................... - 12 -3.2.4润滑......................................................... - 13 -3.3滚珠丝杠的计算与选型.............................................. - 13 -3.3.1极限载荷的计算............................................... - 13 -3.3.2最大动载荷计算............................................... - 14 -3.3.3初选滚珠丝杠型号............................................. - 14 -3.3.4滚珠丝杠的刚度校核........................................... - 15 -3.3.5滚珠丝杠稳定性校核........................................... - 16 -3.4电机的计算与选型.................................................. - 16 -M的计算....................................... - 16 -3.4.1等效驱动转矩t1M的计算....................................... - 17 -3.4.2加速驱动转矩t23.4.3电机的性能校核............................................... - 18 -3.5其他标准件的选型.................................................. - 19 -3.5.1轴承的选择................................................... - 19 -3.6直线运动结构展示.................................................. - 21 - 第四章旋转运动机械结构设计.............................................. - 22 -4.1力矩电机与传统结构的比较.......................................... - 22 -4.2力矩电机直驱双摆式铣头结构方案.................................... - 23 -4.3细化设计.......................................................... - 24 -4.3.1电机的结构与选型............................................. - 24 -4.3.2最大负载转矩的计算........................................... - 25 -4.3.3轴承的选型................................................... - 26 -4.4旋转运动结构展示.................................................. - 27 -4.5总体机械结构展示.................................................. - 28 - 第五章总结与展望........................................................ - 29 - 参考文献.............................................................. - 30 - 致谢..................................................................... - 31 -第一章引言1.1 对五轴数控加工平台的认识1.1.1 发展现状当下,我国制造的五轴联动数控加工中心在种类上已经具备立式、卧式、龙门式和落地式等结构的加工中心,可以适应不同大小的复杂零件生产,加上五轴联动数控铣床和大型镗铣床以及车铣中心等的开发,基本满足了国内市场的需求。
五轴联动数控机床简单介绍
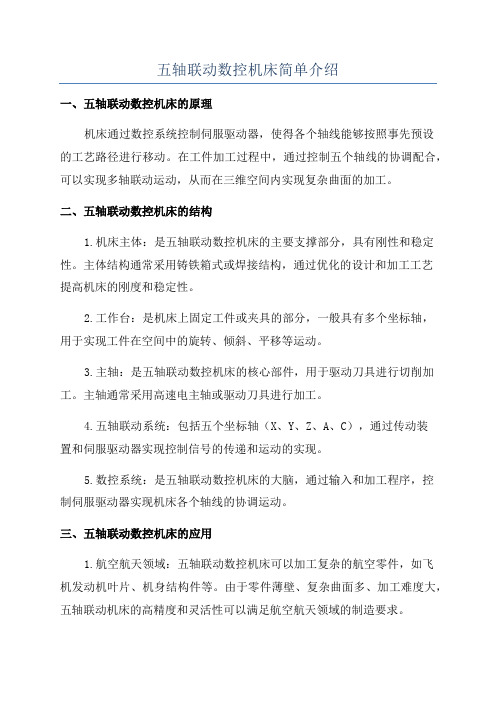
五轴联动数控机床简单介绍一、五轴联动数控机床的原理机床通过数控系统控制伺服驱动器,使得各个轴线能够按照事先预设的工艺路径进行移动。
在工件加工过程中,通过控制五个轴线的协调配合,可以实现多轴联动运动,从而在三维空间内实现复杂曲面的加工。
二、五轴联动数控机床的结构1.机床主体:是五轴联动数控机床的主要支撑部分,具有刚性和稳定性。
主体结构通常采用铸铁箱式或焊接结构,通过优化的设计和加工工艺提高机床的刚度和稳定性。
2.工作台:是机床上固定工件或夹具的部分,一般具有多个坐标轴,用于实现工件在空间中的旋转、倾斜、平移等运动。
3.主轴:是五轴联动数控机床的核心部件,用于驱动刀具进行切削加工。
主轴通常采用高速电主轴或驱动刀具进行加工。
4.五轴联动系统:包括五个坐标轴(X、Y、Z、A、C),通过传动装置和伺服驱动器实现控制信号的传递和运动的实现。
5.数控系统:是五轴联动数控机床的大脑,通过输入和加工程序,控制伺服驱动器实现机床各个轴线的协调运动。
三、五轴联动数控机床的应用1.航空航天领域:五轴联动数控机床可以加工复杂的航空零件,如飞机发动机叶片、机身结构件等。
由于零件薄壁、复杂曲面多、加工难度大,五轴联动机床的高精度和灵活性可以满足航空航天领域的制造要求。
2.汽车制造领域:五轴联动数控机床可以加工各种汽车零部件,如汽缸、曲轴、齿轮等。
汽车零部件一般要求具有较高的精度和强度,同时对于一些复杂构型的零部件,五轴联动机床的加工能力更加优越。
3.模具制造领域:五轴联动数控机床可以用于制造复杂的模具,如注塑模具、压铸模具等。
模具制造对加工精度要求高,加工稳定性要求好,五轴联动机床可以提高加工效率和准确度。
四、五轴联动数控机床的优势与传统数控机床相比,五轴联动数控机床具有以下优势:1.提高加工效率:五轴联动数控机床可以实现多轴同时加工,通过一次装夹就可以完成复杂曲面零件的加工,大大提高加工效率。
2.提高加工精度:五轴联动机床具有更高的刚度和稳定性,在高速运动和复杂曲面加工时能够保持较好的精度和表面质量。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
五轴铣床运动链设计与构型综合刘建慧1邹慧君1颜鸿森21.上海交通大学,上海,2000302.台湾成功大学,台南,70101摘要:根据理论上的自由度的可能组合,将可能存在的五轴机床概念设计及其实例进行分类,并分析了各类设计的优缺点。
基于坐标系统的定义和机床构型码,分析了这些构型实现五轴加工功能的可行性条件。
对基于Stewart 平台新型机床设计概念也进行了简单讨论。
对于工程师进行机床的设计与评价有一定的帮助。
关键词:铣床;运动链;五轴;构型综合中图分类号:T H 122 文章编号:1004 132X(2006)08 0788 05Five -axis Milling Machine Kinematic Chain Design and Structure Configuration SynthesisLiu Jianhui 1 Zou H uijun 1 Yan H ongsen21.Shanghai JiaoT ong U niversity ,Shang hai,2000302.Taiw an Chung kung University,Tainan,T aiw an,70101Abstract :This paper classified the possible conceptual designs and actual existing implementatio ns based o n the theor etically possible com binations of the degrees o f freedom.The advantag es and disad v antages o f each concept w ere analyzed.Based on the definitio n o f coordinate systems and the co nfigu r ation code of machine tools,design lim itations for fiv e-ax is machining centers w ere identified.The new concepts based on the Stew art platform introduced r ecently in industr y w er e also briefly dis cussed.T he results o f this paper are beneficial to engineers in the design and ev aluatio n of five-ax is machine to ols.Key words :milling m achine;kinem atic chain;fiv e-axis;configuration sy nthesis收稿日期:2005 05 260 引言机床的功能是在刀具和工件之间产生成形运动来切削出所需要的工件形状。
选择机床时主要考虑所加工工件的尺寸、形状、需要的加工精度以及工作效率等。
而机床的构型配置大体上决定了它的刚度、精度和动态特性。
为建立机床的模块化设计方法,文献[1~3]提出了机床结构描述法,这种描述方法用有向结构图来表示机床。
结构图的结点和有向边分别代表机床的结构模块和作用力的流向。
在这些研究成果的基础上,文献[4,5]又提出了一种产生机床所有可能构型配置的方法,并给出了机床的基本模块以及约束条件和基本特征。
文献[6]尝试采用专家系统方法,根据三轴机床的输入要求来确定结构构型和规格。
一些学者对五轴机床及其形状创成函数、构型码作了研究[7~10],所综合出的构型并不全面。
很显然,对五轴机床构型的全面分析需要进一步完善。
1 机床运动链及形状创成函数机床的轴数通常是指机床滑轨的自由度数或可控独立运动数。
一个三轴铣床有3个直线滑轨X 、Y 、Z,它们可以在对应的行程范围内在任意位置定位。
刀具轴在加工过程中是固定的,这限制了刀具相对于工件定向的柔性。
另外,三轴铣床不同的构型方案也有限。
在不改变现有基本构型的情况下,为了增加刀具和工件相对定向的柔性,必须额外地增加自由度。
以一个传统的三直线运动轴机床为例,可以通过提供旋转轴来增加工件与刀具定向的柔性。
为把工件加工出需要的外形,需要机床通过精确的直线运动和旋转运动执行可控的切削和进给。
因此,机床运动轴的分配和组合成为机床设计的基本元素。
机床可以看作是彼此相对运动的N 个运动构件的组合,每个构件沿X 、Y 和Z 轴做直线运动或旋转运动。
图1所示为一个四轴铣床的运动链图。
工作台(或工件)到床身分别经过A 轴、X 轴、Y 轴,主轴头或刀具到床身经过Z 轴。
由运动链图可将机床运动轴分为两组:工件运动轴和刀具运动轴。
工件运动和刀具运动分别由3个和1个轴来完成。
因此机床类似于两个相互协作的机器人,一个机器人运送工件,另外一个机器人运送刀具。
从工作台到主轴,机床与刀具的相对运动顺序可用机床构型码K 表示:K =f (k 1,k 2, ,k N )(1)其中,k i (i =1,2, ,N)为x 、y 或z 时,表示两个机床构件沿X 、Y 或Z 轴方向的相对直线运动;k i 为a 、b 或c 时,表示两个机床构件绕X 、Y 或Z 轴的相对788图1 四轴铣床运动链图旋转运动。
在直角坐标系统中,机床各构件之间的相对运动可以用6个坐标转换矩阵来表示,A1X、A2Y和A3Z表示两构件分别沿X、Y和Z轴相对直线运动的坐标转换矩阵,A4 、A5 和A6 表示两构件分别绕X、Y和Z 轴相对旋转运动的坐标转换矩阵。
因此,在固定坐标S O(下标O表示机床床身,下同)中,切削刀具的中心点作用在固定工作台上的工件,其坐标r O可表示为r O=(x,y,z,1)T(2)由式(1)及坐标转换矩阵A i,r O可表示为r O=A k1A k2 A k N A6 r T(3)r T=(0,0,0,1)T式中,下标 为刀具的旋转角度。
式(3)表示工件轮廓由旋转刀具和所谓的形状创成函数产生。
以一个三轴立式加工中心机床为例,若机床构件之间的相对运动是:工作台 滑轨 床身 主轴头,k1=x,k2=y,k3=z,则其构型码为K=X YOZ。
设刀具中心点的坐标为r T=(0, 0,0,1)T,使用坐标转换矩阵以及式(3),可得到这个机床的形状创成函数为r O=A1X A2Y A3Z A6 r T=(x,y,z,1)T(4)五轴机床的形状创成函数也可以通过同样的方法得到。
2 五轴机床运动结构分类为了获得刀具与工件之间定位与定向的最大柔性,机床至少需要5个自由度。
对于五轴机床,从两种运动轴,即旋转运动轴(R)和直线平移运动轴(T),我们得到如下4个大类:①3个T,2个R;②2个T,3个R;③1个T,4个R;④5个R。
现有的绝大多数机床都属于第一类,一些焊接机器人、加工中心也属于此类型。
少数机床属于第二类,如用来加工轮船叶轮的机床。
第三类和第四类多用于机器人的设计,且通常需要增加自由度数。
机床的各轴可以多种组合分配在工件运动和刀具两边。
我们以带动工件运动和带动刀具运动的轴数以及每个轴在运动链中的次序来进行分类。
在基于直角坐标系统的机床中,5个自由度如下:3个平移X、Y、Z(通常表示为T TT)和2个旋转AB、AC 或BC(通常表示为RR)。
3个旋转轴(RRR)和2个直线运动的轴(TT)的组合情况很少见。
习惯上将带动工件运动的所有轴的符号后加撇号。
2.1 根据带动工件和带动刀具轴的顺序分类对于五轴机床,1个刀具运动轴和4个工件运动轴可以作如下组合:对于每个可能的刀具运动轴X、Y、Z、A、B、C,其他的4个工件运动轴可以从余下的5个轴中选择。
对于刀具轴的每一个不同选择,从余下的5个轴中选4个的组合数为5 4 = 120。
因此,理论上有6 120=720种可能的五轴机床构型,且只有1个刀具运动轴。
如果仅考虑有3个直线运动轴的五轴机床,那么只有3 5 =360种可能组合。
以集合G t表示t个刀具运动轴的组合集合,它同对应的工件运动轴的组合集合G w相同,其中w=5-t。
根据以上定义,可以得到如下五轴机床的子集:①G0/G 5;②G1/G 4;③G2/G 3;④G3/G 2;⑤G4/G 1;⑥G5/G 0。
G5/G 0机床 所有的轴都在刀具一侧,工作台固定。
这种机床是最早的五轴机床中的一种,用于加工质量非常大的工件,但由于在刀具侧的运动副太多,弹性变形和滑轨的滞留带来的误差非常大。
G0/G 5机床 所有的运动轴运送工件,刀具在空间固定。
这种结构用于加工非常小的工件,可使用小直径高转速刀具进行加工,而且可获得很好的刚性。
G4/G 1机床 4个轴带动刀具,1个轴带动工件。
基本上可分为两大类,带动工件的运动轴为R 或者T 。
G1/G 4机床 1个轴在刀具侧,其余4个轴带动工件。
基本上也分为两大类,单一轴运动链可以是R或者T。
G3/G 2机床 3个运动轴在刀具侧,2个运动轴在工件侧。
基本上可分为三大类,带动工件运动轴均为直线运动轴(T T ),或均为旋转轴(R R ),或1个直线运动轴且1个旋转运动轴(T R )。
这种机床可用来加工大型工件,但刀具侧的结构比较复杂。
最常见的配置是由2个旋转轴带动工件。
G2/G 3机床 2个轴带动刀具,3个轴带动工件。
基本上有三大类,带动刀具运动轴均为直线运动轴(TT),或均为旋转运动轴(RR),或一个直线789运动轴且一个旋转运动轴(TR)。
2.2 根据旋转轴所在位置分类可以根据旋转轴所在位置对机床进行分类,这里只考虑2个旋转轴、3个直线运动轴的五轴机床,可能的情况有:①旋转轴在主轴侧;②旋转轴在机床工作台侧;③两者的组合。
若在刀具和工件运动链中分别以N T、N R以及N T、N R表示直线运动轴和旋转运动轴的数目,那么可以得到如下组合:N comb=(N T+N R)N T N R(N T+N R)N T N R(5)N T+N T=3 N R+N R=2上述3种不同情况的总组合数为60。
从设计的角度来看,这是个很易于处理的组合数目。
下面针对3种不同的情况给出构型组合数。
2.2.1 R R 机床2个旋转轴带动工件。
刀具轴可能固定或由1个(T)、2个(TT)、3个(TTT)直线运动轴带动。
(1)集合G0/G 5 刀具固定,所有5个轴带动工件。
由式(5),N comb=10(N T=3,N R=2)。
(2)集合G1/G 4 N T+N R=1,N T=1, N R=0,这是刀具运动链的唯一组合。
由式(5), N comb=6。
6种组合分别为R R T T OT、T T R R OT、R T R T OT、T R T R OT、R T T R OT以及T R R T OT。