GSM各轴代号
GSM常用参数缩写解释
GSM常用参数缩写解释网优 2009-09-14 15:01 阅读15 评论0字号:大中小参数缩写含义解释参数缩写含义解释CELL_NAME 小区名称CELL 小区号ADDRESS 基站地址TIME 时间BS_NAME 基站名称BCCH 广播控制信道BS_NO 基站编号BSIC 基站色码ARFCN 载频号LON 经度LAC 位置区号码LAT 纬度FER 帧丢失率CI 小区的识别码SQI 话音质量评估TA 时间提前C1 路径损耗原则参数NUM_FRAME 帧号码C2 小区重选信道质量标准参数DTX 不连续传输MARK 计录测试标志(切换,掉话等)HOPPING 跳频状态MESSAGE 消息内容MICROCELL 微小区BSIC_SERV 当前的基站色码NON_BCCN 邻小区的广播控制信道BCCH_SERV 当前的广播控制信道BCCH_N 邻小区广播控制信道MCC_SERV 当前的国家移动码RXLEV_N 邻小区平均的接收电平MNC_SERV 当前的移动网号BSIC_N 邻小区基站色码LAC_SERV 当前的位置区号码C1_N 邻小区路径损耗原则参数CELL_SERV 当前服务小区号C2_N 邻小区小区重选标准参数CI_SERV 当前的小区识别码RXLEV_F 平均的接收电平_FMAIO_TCH 业务信道移动配置指数偏移RXQUAL_F 信道接收质量_FHSN_TCH_ 业务信道的跳频序列码RXLEV_S 平均的接收电平_S NUM_TCH 业务信道号RXQUQL_S 信道接收质量_STN_TCH 业务信道时隙ANT_TYPE 天线型号TYPE_TCH 业务信道类型ANT_ANGLE 天线覆盖角MODE_TCH 业务信道模型DOWNTILT 天线下倾角NUM_S_DCH 独立专用控制信道BEARING 天线水平极化角ACT_RLINK 无线接续超时计数最大值PHOTO 天线照片文件名MAX_RLINK 无线接续超时计数当前值TX_POWER 发信功率电平RXLE_SAME 同频平均的接收电平MAX_TS_BTS 基站的最大时隙BSIC_SAME 同频基站色码MAX_TS_MS 手机的最大时隙RXLE_NEI 邻频平均的接收电平HEX_STRING 十六制字符TX_POWER 发信功率电平NCELL_NUM 邻小区编号BSIC_NEIG 邻频基站色码HEX_STRING 十六制字符NCELL_NUM 邻小区编号。
GSM各种码
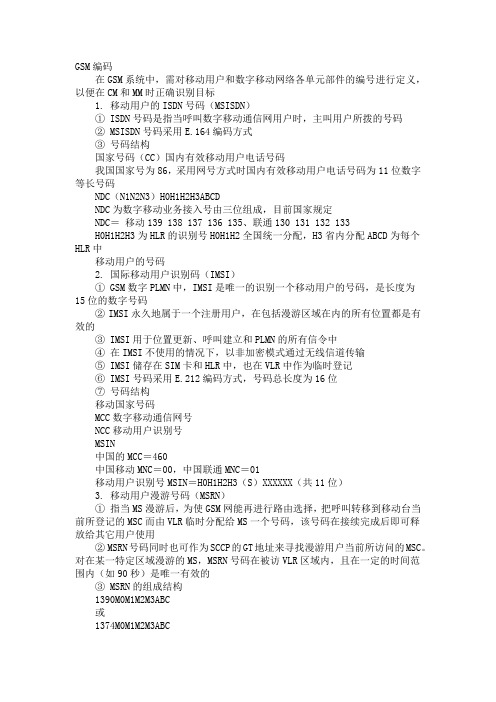
GSM编码在GSM系统中,需对移动用户和数字移动网络各单元部件的编号进行定义,以便在CM和MM时正确识别目标1. 移动用户的ISDN号码(MSISDN)① ISDN号码是指当呼叫数字移动通信网用户时,主叫用户所拨的号码② MSISDN号码采用E.164编码方式③ 号码结构国家号码(CC)国内有效移动用户电话号码我国国家号为86,采用网号方式时国内有效移动用户电话号码为11位数字等长号码NDC(N1N2N3)H0H1H2H3ABCDNDC为数字移动业务接入号由三位组成,目前国家规定NDC=移动139 138 137 136 135、联通130 131 132 133H0H1H2H3为HLR的识别号H0H1H2全国统一分配,H3省内分配ABCD为每个HLR中移动用户的号码2. 国际移动用户识别码(IMSI)① GSM数字PLMN中,IMSI是唯一的识别一个移动用户的号码,是长度为15位的数字号码② IMSI永久地属于一个注册用户,在包括漫游区域在内的所有位置都是有效的③ IMSI用于位置更新、呼叫建立和PLMN的所有信令中④ 在IMSI不使用的情况下,以非加密模式通过无线信道传输⑤ IMSI储存在SIM卡和HLR中,也在VLR中作为临时登记⑥ IMSI号码采用E.212编码方式,号码总长度为16位⑦ 号码结构移动国家号码MCC数字移动通信网号NCC移动用户识别号MSIN中国的MCC=460中国移动MNC=00,中国联通MNC=01移动用户识别号MSIN=H0H1H2H3(S)XXXXXX(共11位)3. 移动用户漫游号码(MSRN)① 指当MS漫游后,为使GSM网能再进行路由选择,把呼叫转移到移动台当前所登记的MSC而由VLR临时分配给MS一个号码,该号码在接续完成后即可释放给其它用户使用② MSRN号码同时也可作为SCCP的GT地址来寻找漫游用户当前所访问的MSC。
对在某一特定区域漫游的MS,MSRN号码在被访VLR区域内,且在一定的时间范围内(如90秒)是唯一有效的③ MSRN的组成结构1390M0M1M2M3ABC或1374M0M1M2M3ABC1390和1374为漫游号码标记1390 M0M1M2M3或1374 M0M1M2M3为漫游地MSC端局的号码ABC为漫游地MSC 端局临时分配给移动用户的漫游号码,范围是000~4994. 切换号码(HON)① 当进行MSC交换局间切换时为选择路由由切换目的地MSC(目标MSC)临时分配给来访移动用户的一个号码②该号码为MSRN号码的一部分③ 其组成结构1390M0M1M2M3ABC或1374M0M1M2M3ABCABC的范围是500~9005. 临时移动用户识别码(TMSI)① 为了对IMSI保密,VLR可给来访移动用户在位置登记(包括位置更新)后或激活补充业务时,分配一个唯一的TMSI号码,它仅在本地使用,为一个4Byte 的BCD码② 移动用户的TMSI与IMSI是对应的,在呼叫建立和位置更新时,空中接口传输使用TMSI6. 位置区识别码(LAI)① 在检测位置更新和信道切换的需求时,要使用到位置区识别LAI② 位置区识别码LAI用于识别移动台所处的位置③ 当移动台从一个位置区移动到另外一位置区时,需要进行位置登记④ LAI号码结构MCCMNCLACMCC=460 MNC=00 或 01LAC为位置区码,由一个2Byte的BCD码(X1X2X3X4)组成,X1X2由国家相关业务部门统一分配,X3X4由省内主管部门分配LAC不使用全部为0的编码7. 全球小区识别码(CGI)① 全球小区识别码(CGI)是用来识别一个小区(基站/一个扇形小区)所覆盖的区域② CGI是在LAI的基础上再加小区识别码(CI)构成的③ 其结构是MCCMNCLAICI其中CI为2Byte的BCD码,由各MSC自定8. MSC/VLR号码① MSC/VLR号码是用来在7号信令信息中标识MSC/VLR的号码② 组成结构CCNDCLSPCC和NDC同MSISDN的规定(CC=86 NDC=139 138 137 136 135 133 132 131 130)LSP(Locally Significant Part)由运营商规定③ MSC/VLR采用E.164编码方式,即ISDN编码方式④ MSC号码与VLR号码相同(目前二者合一配置)9. HLR号码① HLR号码是用在7好信令信息中来标识HLR的号码② HLR号码组成结构CCNDCH0H1H2H30000③ HLR号码采用E.164编码,通常将用户号为0000的MSISDN号码作为HLR 号码10. 漫游区域识别码(RSZI)① RSZI主要用于识别移动用户的漫游区。
GSM复习知识点梳理

1.GSM网络模型2.CME20系统结构划分GSM服务区PLMN服务区MSC/VLR服务区位置区小区3.GSM频率及其计算GSM900上行:890~915MHz;下行:935~960MHz;共分为124对双工载频,载频间隔为200KHZ。
频道号:0-124(0作保护,不用)f=890+N*0.2每载频共分8个时隙,即为8个信道。
总信道数为124×8=992个信道。
124个频点中包含了移动GSM(1-95),联通(96-124)。
E-GSM900 扩展的GSM900频段,扩展的这一部分是:上行:880~890MHz;下行:925~935MHz;上下行各10M,频道号:975-1024。
移动使用(1000-1024、0)。
GSM1800上行: 1710-1785 MHz ;下行: 1805-1880 MHz共分为374对双工载频,载频间隔为200KHZ。
频道号:512--8854.GPRS网络结构及各接口接口或参考点说明R 非ISDN终端与移动终端之间的参考点Gb SGSN与BSS之间的接口Gc GGSN与HLR之间的接口Gd SMS-GMSC之间的接口,SMS-IWMSC与SGSN之间的接口Gi GPRS与外部分组数据之间的参考点Gn 同一GSM网络中两个GSN之间的接口Gp 不同GSM网络中两个GSN之间的接口Gr SGSN与HLR之间的接口Gs SGSN与MSC/VLR之间的接口Gf SGSN与EIR之间的接口Um MS与GPRS固定网部分之间的无线接口B MSC-VLR之间接口5.各网络接口的信令模型(分层结构)及其协议BSS系统中的信令应用其中各层协议的含义如下:CM:通信管理CC:呼叫管理SS:补充业务管理SMS:短消息管理MM:移动管理RR:无线资源管理LAPDm:Dm信道的链路接入规程LAPD:D信道的链路接入规程BTSM:BTS管理部分MTP:消息传送部分SCCP:信令连接和控制部分BSSMAP:BSS管理应用部分DTAP:直接传递应用部分GPRS信令模型(MS-SGSN)图中的GMM/SM是指GPRS移动性管理和会话管理,支持移动性管理,如GPRS服务连接、GPRS 服务断开。
GSM通信系统原理简概(一)

• 位置区识别码(LAI) • 位置区是指移动台可任意移动而不需要进 行位置更新的区域,它可由一个或若干个 小区组成,为了呼叫移动台,系统在一个 位置区内所有基站同时发寻呼信号。位置 区识别码LAI 用于检测位置更新和信道切换 的请求。
• 移动设备国际识别码(IMEI) 又称为国际移动设备标识,是手机的唯一 识别号码。手机在生产时,就被赋予一个IMEI, 它也是该手机在厂家的“档案”和“身份证 号”。 *#06#
信噪比?
俯仰角:天线偏离垂直方向的夹角。
馈线:½ 馈线,7/8馈线
天线与馈线的连接
• 国际移动用户识别码( I MS I) 在GSM系统中对MS的唯一识别,在全网和全 球范围内唯一。用于用户身份的识别。保存在 SIM卡里。
• 临时移动用户识别码(TMSl) 考虑到系统的安全性,GSM系统提供了在空中 接口传递TMSI代替IMSI的保密措施。仅限在VLR 管辖区内 代替IMSI临时使用,且与IMSI相互对应。
GSM通信系统原理 简 概
何为网络优化?
通过各种硬件或软件技术使网络性能达 到我们需要的最佳平衡点。
天系统
基站
• 天馈系统:天线,馈线。
全向天线:360度,例如,微蜂窝,吸顶式天线 定向天线:扇区化天线,90度或120度或180度, 主要用于宏站
方位角:主瓣,无线有效覆盖 旁瓣,各扇区间来进行重覆,用 个扇区间切换。 定义:天线所指方向,逆时针旋转,与正 北方向的夹角。
GSM各轴代号

一、主电路概括.主机使用3-phase 230VAC,通过AC Input relay后分3路供给AC Chassis.1.230VAC经由7FU到达T2 Transformer,输出为24VAC.供给PDP,再由PDP分压成24VAC;+24VDC;+12&+15VDC供给主机中的各个switch,sensor,start button,feeder interface等.2.230VAC经由REL1,CONT3&CONT4a.经9FU供给Lower power chassis.在LP chassis中230VAC首先由T1 Transformer 变压成40VAC供给LP power supply.再由power supply输出+15VDC&-15VDC供给除X,Y外的各轴AMP,和+56VDC供给除X,Y外的各轴马达(包括head1 Z&Q;head2 Z&Q;transfer;PWC).b.经10FU供给High power chassis,由X,Y AMP供给X,Y马达.3.230VAC经8FU供给T3 Transformer,输出120VAC.a.经1FU供给front&rear feeder outlets.b.经2FU供给VME chassis.C.经3FU供给24VAC Transformer(在VME下方).d.经4FU供给Monitor.e.经5FU供给main machine fan and PDP power supply.f.经6FU给HP中的X,Y AMP提供120VAC的AMP用电.二、LOWER POWER CHASSIS主机中除X,Y外所有轴的AMP都在Lower power chassis中,包括head1&head2 Z、theta;transfer;PWC.打开Lower power chassis各AMP由左到右分别控制的是:transfer;PWC;head1 theta;head1 Z;head2 theta;heta2 Z.其中transfer和PWC的AMP 可以共享;theta axis AMP可以共享.因为我们机器的配置关系,所以Z axis AMP不可以共享.1.Transfer Errora.当机器屡次发生进板不到位时(主要表现为找不到mark点,可以观察停板位置与stopper的相对位置是否正常来判断),首先要确认马达皮带是否正常,马达与encoder相连的coupling工作是否正常,如以上均完好,可以尝试调整进板sensor的位置来校正.所有动作都无效时,再尝试更改参数conversion factor 2的数值(注意该参数的涵义指的是距离而不是速度,而且是倒计数.具体的说:进板sensor感应到板子的末端,当板子前进进板sensor刚off的时候encoder开始计数,倒计数至2050时默认为进板已经到位),该数值越小,传板的距离越远.b.Calibration transfer,指得是当需要更改参数conversion factor 2时应该更改成多少,要通过校正得出.具体详细的步骤可参阅UIC Navigator.简述如下:首先,将calibration plate放置在机器的停板位置,用beam2的PEC camera(将内外圈的光强都设置为25)找到plate上的mark点.再打开manual control,让transfer前进11.3in;然后移动rear head 11.3in.再左右移动head2找到plate上原先找到的mark,记下这段距离X.以X乘以200,得出数值Y.用机器默认Conversion factor 2的值加上或减去Y所得出的数值,就是我们最终要校正的值.2.PWC有时会出现当我们load完程序后,轨道的实际宽度比程序设定宽度或宽或窄了一点(当然我们可以通过程序调整来克服它,但是每次换线都要去调整程序),这时我们可以调整PWC可动侧的limit switch来观察效果.如果无效,可以尝试调整参数positive soft limit的值,应该会有效果.具体的校正方法请参阅UIC Navigator.另:PWC和Transfer的AMP、马达和Encoder都是可以共享的,如果逼不得已,可以先将PWC bypass将备品先供transfer使用.3.Z axis整个Z axis机构由下列部分组成:AMP;MOTOR;ENCODER;SHAFT;CLUTCH等.Z轴机构最易损坏的就是CLUTCH(使用寿命在一年左右),下面讲述CLUTCH CHECK的方法:方法一:在I/O中选择你要CHECK的CLUTCH,并让其吸盍,用手旋转马达将Z轴降至最低,再旋转马达.若CLUTCH 有故障,你会发现很容易就能将马达转动;若CLUTCH完好,要加很大的力才能转动.方法二:击活manual control,选中要check clutch所在头的Z轴,并将4个CLUTCH全部吸盍,然后让Z轴下降,同时观察4只Spindle,如果有一只和其它的下降高度不一致或是动作不同步,则表明该颗clutch有故障,或者是该spindle的背线有故障.注意:就我们的机器配置而言两块Z轴的AMP绝对不可以对换,因为C4 Head和Flex Head 要求的压力不同.4.Theta axisGSM一个头上的4个spindle共享一个theta马达,也就是说只要有一个spindle在转,另外的3个spindle就会一起转.整个theta轴部分从机构上讲就是马达驱动,在每一只spindle上面有一个housing,housing上下各有一颗 bearing,如果theta机构有故障比较难判断,要将整个theta肢解后才能确切的找到真因(凭经验bearing损坏的频率较高).从电路上讲,AMP供电给马达通过ENCODER计算旋转的角度,theta马达最小的旋转角度是0.0072度,这个精度encoder无法达到,所以在这一路另外还有一个interpolation unit(拆下head interface,会看到一个固定在头上的黑色的盒子,这就是interpolation unit),通过它来达到更精确的目的.另外,在GSM的置件头上,SPINDLE高度和THETA角度的校正,经参阅UIC Navigator.三、HIGH POWER CHASSISHigh power chassis是主机的高压控制中心,XY轴AMP都在其中.1.X,Y轴动作的基本原理VME中的MOTION CONTROLLER将动作命令传出,经HP INTERFACE传给AMP,再由AMP给马达供电驱动X or Y轴.X轴或Y轴在动作过程中,由READ HEAD读取LINEAR SCALE,再经过interpolation unit反馈给motion controller.在这里interpolation unit所起的也是更精确的作用.linear scale上的最小刻度是0.1mm,但是XY方向上的置件精度可以精确到0.001mm.interpolation unit就能起到这样的功能.2.X,Y TroubleshootingX,Y troubleshooting涉及到AC chassis,VME,high power chassis及X&Y硬件部分等方面.a.X&Y的所有动作指令都由axis controller(VME中靠近MMIT卡最近的3块卡,卡上有标UIMC)发出.这三块卡的料号完全一样,只是跳线不同,在更换时请注意.b.High power interface board是X&Y轴AMP的载体.我们可以通过以下的手段简易的判断它是否有故障,就是量测Interface上的C13,C35,C41,C46的电压,正常情况下的电压分别+5VDC,+12VDC,+15VDC,-15VDC,tolerance为+(-)10%.c.AMP.high power chassis中有4个AMP,从左到右依次为X1,Y1,Y2,X2.正常情况下AMP 上的LCD应该显示为0或者8,显示其它数字都是异常的.这时我们可以尝试将AMP清零或许有效.方法是:拍下E-STOP,按一下interface上的fault reset按钮,这时你会发现LCD上的数据应该是零,如果失败POWER CYCLE THE MACHINE.另外,我们可以量测AMP的输入端J1的pins1,2&3;J1的pins5-6来确认AMP输入电压是否有问题.pins1,2,3之间的电压是230VAC;pins5,6之间的电压是120VAC,tolerance都是+(-)10%.d.Techometer是Y轴特有的装置,它安装在面对BEAM时右手边,紧贴Y轴的滑轨.如果Techometer有故障,机器在运行时会发出很大的噪音,这时要检查techometer是否有损坏或者是techometer wheel和Y轴滑轨贴合的不是很好.解决它我们可以有如下两种方法:方法一,将techometer移开,让techometer wheel和Y轴的滑轨完全分开(问题:techometer的作用?),这样做会有一定的负面影响,不是长久之计.方法二:Replacement and adjust it(详细的方法请参考UIC Navigator).校正techometer时,procedure上要求用2英镑的力作用其上,因为我们没有专门的治具,只是凭感觉,具体的说就是:锁紧Techometer后,去转动techometer wheel要求要加一点力才能转动,不能非常松,也不能转不动.e.怎样测试read head或linear scale是否有故障(除XY外主机上的其它的6根轴测试ENCODER的方法都与之相同 ):路径:Machine status\diagnostics\global memory\altermemory\OS_readonly\OS_readonly(A-M)\ID_OS2_readonly_axis_loc_area打开后可以看到如下图所示的对话框,在axis处输入要查询的轴的编号,点击read values 后,在counts和micron中就可以显示出当前encoder的读数;转动轴再点击查看,随着轴的转动encoder的读数也会随着变化,反之则说明encoder有问题.主机各轴的编号如下:AXIS OS/2 Read Only Axis NumberX1 5Y1 6X2 7Y2 8Board transfer 9PWC 10HD1 Theta 11HD1 Z 12HD2 Theta 15HD2 Z 16四、VMEVME是机器的主控中心,机器的各种动作指令都由VME传出.打开VME的盖子可以看到VME 箱子内有20个卡槽,我们机器只用到了其中的14各,也就是说还有6各卡槽是空的没有用到.下面我们来一一叙述每一块卡的功能.顺序是面对机器由左到右.Slot1:CPU board.Slot2:Net board.Slot3:VGA & Video capture.Slot4:Modem;serial I/O and controls disk drive.Slot5:Machine controller,俗称CPU Force.Slot6~8:Vision controller.它负责camera的工作和影像处理等.又叫lantern card.Slot9:空槽.Slot10:Vision Interface.这块卡只有在Q block以前的机器才有,R block以后的机器这块卡集成到了Slot11里面.Slot11~13:Motion controller.这三块卡的料号完全相同,只是跳线不同而已.它控制着主机内的所有10根轴,具体的是:SLOT11控制着X1、Y1、X2、Y2;SLOT12控制着 Transfer 、PWC 、着θ2、Z2.这块MMIT 卡控制着PTF.负责主机与PTF 的通讯.意:以上VME 中的槽卡介绍只针对OS/2版本的机器,新的UPS+机器与之有很大的不同. 参照电路图很难描述清楚,如果有兴趣可以去翻阅电路图,那上面非常详细的电路走向.er.所式,一定要保证主机的气压能够达到标准(90PSI),否则会引起PTF 气压不足轴和PALLET 轴的AMP 也是PTF 的EPC1(即通常所说的1PC),EPC2(即MP 供给马达和ENCODER.造成伤害,请务正时找一助手帮忙即可,务必请其它闲杂人等远离机器.Elevator 时首先要将PTF 的安全门Bypass,还要将PTF 靠近REFLOW 一测的COVER 打θ1、Z1;SLOT13控制 Slot14~16:空槽.Slot17:MMIT card. Slot18,19:空槽.Slot20:MMIT card.这块卡控制着主机.VME 中的两块MMIT 卡也是完全相同的,只是跳线不一样,更换是请注意.注在主机中,另外还有GP I/O; Pneumatic panel 等部分这里没有作介绍,可以从UIC Navigator 中详细的了解到他们的机构结构,电路以及功用.在主电路的概括中介绍的主要是AC CHASSIS 中的电路走向,但是在AC CHASSIS 中还有一个很重的部分没有涉及到,那就是安全回路.有关于安全回路的部分,如果不有五、PTFPTF 即Platform Tray Feeder,顾名思义它是一只用来loader tray 盘的特殊feed 用230VAC 由AC CHASSIS 直接供给,通过VME 中的MMIT 卡与主机保持I/O 通讯联系.230VAC 经PTF AC INPUT FUSE 后供给60V & 24V POWER SUPPLY,再分配给PTF 各用电部分工作.60V 电相对比较简单,24V 电在PTF 中无所不在非常的复杂,详细内容请查阅电路图. 目前我们所用机器PTF 主气压的供给有两种方式:一种是由GSM 主机的一级调压阀处直接供给;另一种是经GSM 二级调压后供给.第一种方式,PTF 用气和主机没有多大的关系,如果采用的是第二种方而出现ERROR.因为PTF 本质上是一只FEEDER,所以整体结构比主机简单了很多.PTF 中总共有7根轴,依次是Z,X,Y,ELEVATOR,PALLET,SHUTTLE 和THETA.每一根轴由一个AMP 控制,这些AMP 在PTF 顶端CONTROLLER BOX 中.其中Z 轴和THETA 轴的AMP 是共享的;Y 共享的.注意ELEVATOR 的AMP 由4AR 和4CONT 两个部分组成.主机讯号由MMIT 卡传出后,经MMIT I/O 线到达通常所说的2PC),再由A PTF 中各轴的校正:PTF 中各轴部件更换后,轴的原点校正,在UIC Navigator 中都有很详细的叙述.但是我们很少有校正的治具,下面讲述的方法都是非正规的简易方法,操作中有可能会必小心谨慎.在校 1.Elevator校正开,再将PALLET PIN SENSOR 旁边的一个黑色的小盖子拆下,这时你就可以看到在PALLET PIN SENSOR 旁边的横梁上有一个小孔,Elevator 的侧面也有一个这样的小孔.在正常情况下,机做完长归零后(一定是长归零才可以),这两个器小孔应该是正对着的.如果没有对上,则表明,带张力.再作一次长归零确认.注意:在整个校正过程中,要始tor 马达带电.点后,装上,归零观察.如果不行再重复调整一次,直到找到home pulse 为止.繁琐,在这里就不细说了.你们可以尝试看是否有比较简单的方法,如果找到了记小的LCD 显示器,我们可以通过校正它的读数来校正tray remove sensor.会出现”P1”和一个数字,再按”UP ” OR 数字调整到-475,按”SET ”.照Elevator 马达的原点已经跑掉,需要校正.上述准备工作做好后,让机器作长归零,松开elevator 马达,hold 住elevator 轴上的pulley,给elevator 的brake 接24V 直流电,在转动elevator pulley 让两个小孔完全正对移开24VDC,将马达锁紧调好皮终保证Eleva 2.PalletPallet transfer 马达原点跑位后,最常有的现象是pallet 被拉出的时候有较强烈的抖动,或者出现error: Pallet pin(*) not sensed.校正这颗马达的home pulse 需要用到的治具是encoder text box(料号是43274101).如果不用这个治具,校正的原理和校正Elevator 一样.首先要保证两边的pallet pin 是平行的(即两边的pallet pin sensor 要同时被感应);然后在马达带电的情况下,松开马达拆下皮带,转动pallet transfer 的shaft 一点皮带锁紧马达 3.X Y 轴Pallet 前定位sensor 固定在tray transfer 前端的横梁上,在这个横梁的中间有一个圆孔.PTF 在归零完成后,其吸嘴的位置正好这个圆孔的正上方.我们就籍由这个圆孔和PTF 吸嘴的相对位置来校正X 和Y 的原点位置.在校正时首先要将front cover Interlock bypass.要用到的治具也是encoder text box(料号43274101).我个人认为不用治具来校正是非常困难的,也非常的得告诉我!4.Tray remove sensorPTF 在抛空tray 时,吸盘吸到空tray 后,有一个真空检测的动作.如果真空没有达到或者tray remove sensor 有故障,机器将无法将空tray 盘抛出,并有error 出现.Tray remove sensor 上有一个小校正的步骤如下:a. palm down the machine.b. 按一下LCD 上的SET 键,这时在LCD 屏幕上“DOWN ”,将数字调整到-500后,按”SET ”.c. 这时会出现”P2”和一个数字,将d. 将”P3”调整到-500,按”SET ”.e. 将”P4”调整到-475,按”SET ”.校正结束.依照procedure 上的介绍,校正完成后LCD 上的数字显示应该是”0”;但是,我依procedure 校正完毕后数字不是零,校正后的使用效果很好.如果有兴趣可以研究研究. 有时机器会show 出以下error: Machine can not be write global memory.这在开机时或者生产过程中都会出现,若在生产过程中出现,机器的message 对话框中所有其它的讯息都不会显示.遇到这种情形,首先要检查PTF,确认是否是PTF 临时断电.如果PTF 电源指示灯正常,我们可以先在Configuration 中将PTF dismounted,再开机看看故障是否依旧.若故障消,则表明故障的真因在PTF;若故障依旧,那么就赶快CALL 厂商吧!\ machine configuration \ parameters \ calibration 改为.BAK.样能有效预防LOAD MACHINE MODLE 时机器读出CALIBRATION 之前的旧文件.硬件配置基本与OS/2路径都不相同.下面的叙述全部针对UPS+:机器会 径来解决,路径是: anual control2或以下版本的另一个BUG,就是有时机器没有Repair 画面出现,可以通过以下步 ter.application.ecovery.f. Left click START.上的介绍非常的详细,经常翻阅一定大有裨益.另外经常和厂商作沟通交流也会受益非浅. 失六、CalibrationCalibration 之前,要确认我们所用的治具以及标准feeder 所上的站别是否和机器中的设置相一致.路径:System setup variables configuration .另外,建议在calibration 之前,还要查看一个文件.路径: C:\ USOS \ MODLE \BEAM1(BEAM2) \ FRHEAD1(REHEAD1) \ MODLE.依照该路径打开后,查看SPINOFF 文件,看他的扩展名是甚么.如果扩展名是.MDL 或.OLD 等,最好先将该类文件更名,将扩展名更这以上叙述都是针对OS/2类型的机器.UPS+机器虽然除VME 以外,其它相同,但是上述的很多操作1.测试ENCODER 读数测试各根轴ENCODER 的详细路径比较繁琐,无法一一到来,从以下给出的路径中可以找到详细的方法: Voyager \ maintenance \ head \ flexjet head \ ASSY \ zero in theta encoder.2.UPS+2.02或以下的版本都存在这样的一个BUG,就是在生产时因为换料或是抛料,自动进入SETUP 模式,而且无法自动退出.这时可以参照以下的路ALT message \ screenSPTR \ MC-readonly m 打开后将Active window 的参数有1改为0.3.UPS+2.0骤来解决:a. Right click my compub. Left click manage.c. Left click service andd. Double click service.e. Right click error r因很匆忙,以上只是比较粗浅的作了个大概的介绍,顺便加入了我的一些经验值.如果想要有更进一步的了解,查看Navigator 或Voyager,这两种manual。
GSM主要参数
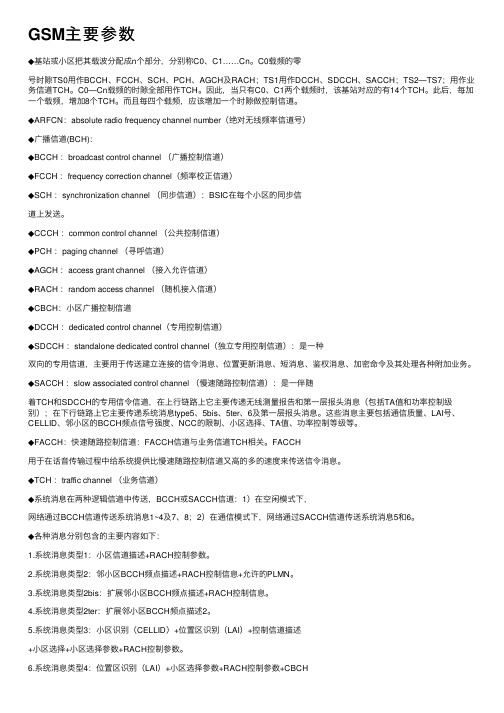
GSM主要参数◆基站或⼩区把其载波分配成n个部分,分别称C0、C1……Cn。
C0载频的零号时隙TS0⽤作BCCH、FCCH、SCH、PCH、AGCH及RACH;TS1⽤作DCCH、SDCCH、SACCH;TS2—TS7;⽤作业务信道TCH。
C0—Cn载频的时隙全部⽤作TCH。
因此,当只有C0、C1两个载频时,该基站对应的有14个TCH。
此后,每加⼀个载频,增加8个TCH。
⽽且每四个载频,应该增加⼀个时隙做控制信道。
◆ARFCN:absolute radio frequency channel number(绝对⽆线频率信道号)◆⼴播信道(BCH):◆BCCH :broadcast control channel (⼴播控制信道)◆FCCH :frequency correction channel(频率校正信道)◆SCH :synchronization channel (同步信道):BSIC在每个⼩区的同步信道上发送。
◆CCCH :common control channel (公共控制信道)◆PCH :paging channel (寻呼信道)◆AGCH :access grant channel (接⼊允许信道)◆RACH :random access channel (随机接⼊信道)◆CBCH:⼩区⼴播控制信道◆DCCH :dedicated control channel(专⽤控制信道)◆SDCCH :standalone dedicated control channel(独⽴专⽤控制信道):是⼀种双向的专⽤信道,主要⽤于传送建⽴连接的信令消息、位置更新消息、短消息、鉴权消息、加密命令及其处理各种附加业务。
◆SACCH :slow associated control channel (慢速随路控制信道):是⼀伴随着TCH和SDCCH的专⽤信令信道,在上⾏链路上它主要传递⽆线测量报告和第⼀层报头消息(包括TA值和功率控制级别);在下⾏链路上它主要传递系统消息type5、5bis、5ter、6及第⼀层报头消息。
GSM参数中文版

这个参数太大,会浪费资源,当话音质量已无法接收时,仍然要等到无线链路超时时才释放。
4.在业务量较小的地区,一般指边远地区,建议52-64,RDLNKTO=12-15;
5.在业务量较小,覆盖较大的地区,一般郊区和农村,建议36-48,RDLNKTO=8-11;
NFRAMEPG
BS PA MFRMS
SET BTS PKGBTSC
定义了同一寻呼组,在寻呼信道上经过多少复帧(51TDMA)重复。实际间隔的复帧数应当是这个值减1;
用三位二进制表示:000-111
000表示2 111表示9;
缺省值:2,最大9。
1.NFRAMEPG从2调整为6,可以省电18%。
2.T=MAX(5, ((5×N+6)/7)×NFRAMEPG/4
5.T,S参数大可以减小RACH争抢冲突,但是会加大接入时间,影响网络接入性能(QoS);
6.建议取值:
在保证CCCH,SDCCH不过载时,应当取合适的T,以使得S尽可能的小,以提高服务质量;
如果CCCH,SDCCH有过载时,调整T,使得S变大,知道过载消失;
在保证以上两点后,在RACH争抢大的地区,T尽可能的大,在RACH争抢小的地区,T适当调小。
N=13-32, NFRAMEPG=0。
邻区大于13个时不论如何都要影响小区重选速度。
1.System information 3;
2.寻呼组:手机根据自己的IMSI计算出的值,叫寻呼组号。手机只监控自己所在寻呼组的那个CCCH消息块(寻呼子信道),在其他时间手机可以不理,甚至关闭某些硬件,用以省电,这又叫做断续接收(DRX)。
100:CCCH使用三个物理信道,不与SDCCH共用,BCCH复帧含27个CCCH;
GSM 系统中的各种号码

必须是和MSISDN 一样符合国家通信网统一编号方式,并且带有VLR 地址信息,它采用E.164
编码,其组成如下:
MSRN=CC+NDC+SN
IMSI 也是15 位长,但采用E.212 编码,它的组成如下:
IMSI=MCC+MNC+MSIN
MCC:Mobile Country Code 移动用户的国家号,中国是460;
MNC:Mobile Network Code 移动用户的所属PLMN 网号;
不超过4 个字节。
6.国际移动台设备识别码(International Mobile Equipment Identity ,IMEI)
GSM 的每个用户终端都有一个唯一的标识码——IMEI,IMEI 是和移动台设备相对应的
号码,和谁在使用这设备无关,移动网可在任何时候请求工作着的移动台的IMEI,以检查这
设备是否属于被窃,或它的型号是否被允许使用,若结果否定,呼叫会被拒绝,在用户不用
SIM 卡作紧急呼叫(用户按紧急呼叫键)的情况下,IMEI 可被用作用户标识号码,这也是唯一
的,IMEI 用于呼叫的情况,IMEI 是唯一用来识别移动台终端设备的号码,称作系列号。
IMEI 为15 位长,它的组成如下:
8.小区全球识别码(CGI)
用于识别一个位置区内的小区。 CGI=MCC+MNC+LAC+CI
其中:CI 为小区识别代码;
LAI:位置区域识别代码;
MCC:为移动国家代码,中国为460;
MNC:移动网号;
LAC:位置区编号。(最长16 比特,可定义65536 个位置区)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一、主电路概括.主机使用3-phase 230VAC,通过AC Input relay后分3路供给AC Chassis.1.230VAC经由7FU到达T2 Transformer,输出为24VAC.供给PDP,再由PDP分压成24VAC;+24VDC;+12&+15VDC供给主机中的各个switch,sensor,start button,feeder interface等.2.230VAC经由REL1,CONT3&CONT4a.经9FU供给Lower power chassis.在LP chassis中230VAC首先由T1 Transformer 变压成40VAC供给LP power supply.再由power supply输出+15VDC&-15VDC供给除X,Y外的各轴AMP,和+56VDC供给除X,Y外的各轴马达(包括head1 Z&Q;head2 Z&Q;transfer;PWC).b.经10FU供给High power chassis,由X,Y AMP供给X,Y马达.3.230VAC经8FU供给T3 Transformer,输出120VAC.a.经1FU供给front&rear feeder outlets.b.经2FU供给VME chassis.C.经3FU供给24VAC Transformer(在VME下方).d.经4FU供给Monitor.e.经5FU供给main machine fan and PDP power supply.f.经6FU给HP中的X,Y AMP提供120VAC的AMP用电.二、LOWER POWER CHASSIS主机中除X,Y外所有轴的AMP都在Lower power chassis中,包括head1&head2 Z、theta;transfer;PWC.打开Lower power chassis各AMP由左到右分别控制的是:transfer;PWC;head1 theta;head1 Z;head2 theta;heta2 Z.其中transfer和PWC的AMP 可以共享;theta axis AMP可以共享.因为我们机器的配置关系,所以Z axis AMP不可以共享.1.Transfer Errora.当机器屡次发生进板不到位时(主要表现为找不到mark点,可以观察停板位置与stopper的相对位置是否正常来判断),首先要确认马达皮带是否正常,马达与encoder相连的coupling工作是否正常,如以上均完好,可以尝试调整进板sensor的位置来校正.所有动作都无效时,再尝试更改参数conversion factor 2的数值(注意该参数的涵义指的是距离而不是速度,而且是倒计数.具体的说:进板sensor感应到板子的末端,当板子前进进板sensor刚off的时候encoder开始计数,倒计数至2050时默认为进板已经到位),该数值越小,传板的距离越远.b.Calibration transfer,指得是当需要更改参数conversion factor 2时应该更改成多少,要通过校正得出.具体详细的步骤可参阅UIC Navigator.简述如下:首先,将calibration plate放置在机器的停板位置,用beam2的PEC camera(将内外圈的光强都设置为25)找到plate上的mark点.再打开manual control,让transfer前进11.3in;然后移动rear head 11.3in.再左右移动head2找到plate上原先找到的mark,记下这段距离X.以X乘以200,得出数值Y.用机器默认Conversion factor 2的值加上或减去Y所得出的数值,就是我们最终要校正的值.2.PWC有时会出现当我们load完程序后,轨道的实际宽度比程序设定宽度或宽或窄了一点(当然我们可以通过程序调整来克服它,但是每次换线都要去调整程序),这时我们可以调整PWC可动侧的limit switch来观察效果.如果无效,可以尝试调整参数positive soft limit的值,应该会有效果.具体的校正方法请参阅UIC Navigator.另:PWC和Transfer的AMP、马达和Encoder都是可以共享的,如果逼不得已,可以先将PWC bypass将备品先供transfer使用.3.Z axis整个Z axis机构由下列部分组成:AMP;MOTOR;ENCODER;SHAFT;CLUTCH等.Z轴机构最易损坏的就是CLUTCH(使用寿命在一年左右),下面讲述CLUTCH CHECK的方法:方法一:在I/O中选择你要CHECK的CLUTCH,并让其吸盍,用手旋转马达将Z轴降至最低,再旋转马达.若CLUTCH 有故障,你会发现很容易就能将马达转动;若CLUTCH完好,要加很大的力才能转动.方法二:击活manual control,选中要check clutch所在头的Z轴,并将4个CLUTCH全部吸盍,然后让Z轴下降,同时观察4只Spindle,如果有一只和其它的下降高度不一致或是动作不同步,则表明该颗clutch有故障,或者是该spindle的背线有故障.注意:就我们的机器配置而言两块Z轴的AMP绝对不可以对换,因为C4 Head和Flex Head 要求的压力不同.4.Theta axisGSM一个头上的4个spindle共享一个theta马达,也就是说只要有一个spindle在转,另外的3个spindle就会一起转.整个theta轴部分从机构上讲就是马达驱动,在每一只spindle上面有一个housing,housing上下各有一颗 bearing,如果theta机构有故障比较难判断,要将整个theta肢解后才能确切的找到真因(凭经验bearing损坏的频率较高).从电路上讲,AMP供电给马达通过ENCODER计算旋转的角度,theta马达最小的旋转角度是0.0072度,这个精度encoder无法达到,所以在这一路另外还有一个interpolation unit(拆下head interface,会看到一个固定在头上的黑色的盒子,这就是interpolation unit),通过它来达到更精确的目的.另外,在GSM的置件头上,SPINDLE高度和THETA角度的校正,经参阅UIC Navigator.三、HIGH POWER CHASSISHigh power chassis是主机的高压控制中心,XY轴AMP都在其中.1.X,Y轴动作的基本原理VME中的MOTION CONTROLLER将动作命令传出,经HP INTERFACE传给AMP,再由AMP给马达供电驱动X or Y轴.X轴或Y轴在动作过程中,由READ HEAD读取LINEAR SCALE,再经过interpolation unit反馈给motion controller.在这里interpolation unit所起的也是更精确的作用.linear scale上的最小刻度是0.1mm,但是XY方向上的置件精度可以精确到0.001mm.interpolation unit就能起到这样的功能.2.X,Y TroubleshootingX,Y troubleshooting涉及到AC chassis,VME,high power chassis及X&Y硬件部分等方面.a.X&Y的所有动作指令都由axis controller(VME中靠近MMIT卡最近的3块卡,卡上有标UIMC)发出.这三块卡的料号完全一样,只是跳线不同,在更换时请注意.b.High power interface board是X&Y轴AMP的载体.我们可以通过以下的手段简易的判断它是否有故障,就是量测Interface上的C13,C35,C41,C46的电压,正常情况下的电压分别+5VDC,+12VDC,+15VDC,-15VDC,tolerance为+(-)10%.c.AMP.high power chassis中有4个AMP,从左到右依次为X1,Y1,Y2,X2.正常情况下AMP 上的LCD应该显示为0或者8,显示其它数字都是异常的.这时我们可以尝试将AMP清零或许有效.方法是:拍下E-STOP,按一下interface上的fault reset按钮,这时你会发现LCD上的数据应该是零,如果失败POWER CYCLE THE MACHINE.另外,我们可以量测AMP的输入端J1的pins1,2&3;J1的pins5-6来确认AMP输入电压是否有问题.pins1,2,3之间的电压是230VAC;pins5,6之间的电压是120VAC,tolerance都是+(-)10%.d.Techometer是Y轴特有的装置,它安装在面对BEAM时右手边,紧贴Y轴的滑轨.如果Techometer有故障,机器在运行时会发出很大的噪音,这时要检查techometer是否有损坏或者是techometer wheel和Y轴滑轨贴合的不是很好.解决它我们可以有如下两种方法:方法一,将techometer移开,让techometer wheel和Y轴的滑轨完全分开(问题:techometer的作用?),这样做会有一定的负面影响,不是长久之计.方法二:Replacement and adjust it(详细的方法请参考UIC Navigator).校正techometer时,procedure上要求用2英镑的力作用其上,因为我们没有专门的治具,只是凭感觉,具体的说就是:锁紧Techometer后,去转动techometer wheel要求要加一点力才能转动,不能非常松,也不能转不动.e.怎样测试read head或linear scale是否有故障(除XY外主机上的其它的6根轴测试ENCODER的方法都与之相同 ):路径:Machine status\diagnostics\global memory\altermemory\OS_readonly\OS_readonly(A-M)\ID_OS2_readonly_axis_loc_area打开后可以看到如下图所示的对话框,在axis处输入要查询的轴的编号,点击read values 后,在counts和micron中就可以显示出当前encoder的读数;转动轴再点击查看,随着轴的转动encoder的读数也会随着变化,反之则说明encoder有问题.主机各轴的编号如下:AXIS OS/2 Read Only Axis NumberX1 5Y1 6X2 7Y2 8Board transfer 9PWC 10HD1 Theta 11HD1 Z 12HD2 Theta 15HD2 Z 16四、VMEVME是机器的主控中心,机器的各种动作指令都由VME传出.打开VME的盖子可以看到VME 箱子内有20个卡槽,我们机器只用到了其中的14各,也就是说还有6各卡槽是空的没有用到.下面我们来一一叙述每一块卡的功能.顺序是面对机器由左到右.Slot1:CPU board.Slot2:Net board.Slot3:VGA & Video capture.Slot4:Modem;serial I/O and controls disk drive.Slot5:Machine controller,俗称CPU Force.Slot6~8:Vision controller.它负责camera的工作和影像处理等.又叫lantern card.Slot9:空槽.Slot10:Vision Interface.这块卡只有在Q block以前的机器才有,R block以后的机器这块卡集成到了Slot11里面.Slot11~13:Motion controller.这三块卡的料号完全相同,只是跳线不同而已.它控制着主机内的所有10根轴,具体的是:SLOT11控制着X1、Y1、X2、Y2;SLOT12控制着 Transfer 、PWC 、着θ2、Z2.这块MMIT 卡控制着PTF.负责主机与PTF 的通讯.意:以上VME 中的槽卡介绍只针对OS/2版本的机器,新的UPS+机器与之有很大的不同. 参照电路图很难描述清楚,如果有兴趣可以去翻阅电路图,那上面非常详细的电路走向.er.所式,一定要保证主机的气压能够达到标准(90PSI),否则会引起PTF 气压不足轴和PALLET 轴的AMP 也是PTF 的EPC1(即通常所说的1PC),EPC2(即MP 供给马达和ENCODER.造成伤害,请务正时找一助手帮忙即可,务必请其它闲杂人等远离机器.Elevator 时首先要将PTF 的安全门Bypass,还要将PTF 靠近REFLOW 一测的COVER 打θ1、Z1;SLOT13控制 Slot14~16:空槽.Slot17:MMIT card. Slot18,19:空槽.Slot20:MMIT card.这块卡控制着主机.VME 中的两块MMIT 卡也是完全相同的,只是跳线不一样,更换是请注意.注在主机中,另外还有GP I/O; Pneumatic panel 等部分这里没有作介绍,可以从UIC Navigator 中详细的了解到他们的机构结构,电路以及功用.在主电路的概括中介绍的主要是AC CHASSIS 中的电路走向,但是在AC CHASSIS 中还有一个很重的部分没有涉及到,那就是安全回路.有关于安全回路的部分,如果不有五、PTFPTF 即Platform Tray Feeder,顾名思义它是一只用来loader tray 盘的特殊feed 用230VAC 由AC CHASSIS 直接供给,通过VME 中的MMIT 卡与主机保持I/O 通讯联系.230VAC 经PTF AC INPUT FUSE 后供给60V & 24V POWER SUPPLY,再分配给PTF 各用电部分工作.60V 电相对比较简单,24V 电在PTF 中无所不在非常的复杂,详细内容请查阅电路图. 目前我们所用机器PTF 主气压的供给有两种方式:一种是由GSM 主机的一级调压阀处直接供给;另一种是经GSM 二级调压后供给.第一种方式,PTF 用气和主机没有多大的关系,如果采用的是第二种方而出现ERROR.因为PTF 本质上是一只FEEDER,所以整体结构比主机简单了很多.PTF 中总共有7根轴,依次是Z,X,Y,ELEVATOR,PALLET,SHUTTLE 和THETA.每一根轴由一个AMP 控制,这些AMP 在PTF 顶端CONTROLLER BOX 中.其中Z 轴和THETA 轴的AMP 是共享的;Y 共享的.注意ELEVATOR 的AMP 由4AR 和4CONT 两个部分组成.主机讯号由MMIT 卡传出后,经MMIT I/O 线到达通常所说的2PC),再由A PTF 中各轴的校正:PTF 中各轴部件更换后,轴的原点校正,在UIC Navigator 中都有很详细的叙述.但是我们很少有校正的治具,下面讲述的方法都是非正规的简易方法,操作中有可能会必小心谨慎.在校 1.Elevator校正开,再将PALLET PIN SENSOR 旁边的一个黑色的小盖子拆下,这时你就可以看到在PALLET PIN SENSOR 旁边的横梁上有一个小孔,Elevator 的侧面也有一个这样的小孔.在正常情况下,机做完长归零后(一定是长归零才可以),这两个器小孔应该是正对着的.如果没有对上,则表明,带张力.再作一次长归零确认.注意:在整个校正过程中,要始tor 马达带电.点后,装上,归零观察.如果不行再重复调整一次,直到找到home pulse 为止.繁琐,在这里就不细说了.你们可以尝试看是否有比较简单的方法,如果找到了记小的LCD 显示器,我们可以通过校正它的读数来校正tray remove sensor.会出现”P1”和一个数字,再按”UP ” OR 数字调整到-475,按”SET ”.照Elevator 马达的原点已经跑掉,需要校正.上述准备工作做好后,让机器作长归零,松开elevator 马达,hold 住elevator 轴上的pulley,给elevator 的brake 接24V 直流电,在转动elevator pulley 让两个小孔完全正对移开24VDC,将马达锁紧调好皮终保证Eleva 2.PalletPallet transfer 马达原点跑位后,最常有的现象是pallet 被拉出的时候有较强烈的抖动,或者出现error: Pallet pin(*) not sensed.校正这颗马达的home pulse 需要用到的治具是encoder text box(料号是43274101).如果不用这个治具,校正的原理和校正Elevator 一样.首先要保证两边的pallet pin 是平行的(即两边的pallet pin sensor 要同时被感应);然后在马达带电的情况下,松开马达拆下皮带,转动pallet transfer 的shaft 一点皮带锁紧马达 3.X Y 轴Pallet 前定位sensor 固定在tray transfer 前端的横梁上,在这个横梁的中间有一个圆孔.PTF 在归零完成后,其吸嘴的位置正好这个圆孔的正上方.我们就籍由这个圆孔和PTF 吸嘴的相对位置来校正X 和Y 的原点位置.在校正时首先要将front cover Interlock bypass.要用到的治具也是encoder text box(料号43274101).我个人认为不用治具来校正是非常困难的,也非常的得告诉我!4.Tray remove sensorPTF 在抛空tray 时,吸盘吸到空tray 后,有一个真空检测的动作.如果真空没有达到或者tray remove sensor 有故障,机器将无法将空tray 盘抛出,并有error 出现.Tray remove sensor 上有一个小校正的步骤如下:a. palm down the machine.b. 按一下LCD 上的SET 键,这时在LCD 屏幕上“DOWN ”,将数字调整到-500后,按”SET ”.c. 这时会出现”P2”和一个数字,将d. 将”P3”调整到-500,按”SET ”.e. 将”P4”调整到-475,按”SET ”.校正结束.依照procedure 上的介绍,校正完成后LCD 上的数字显示应该是”0”;但是,我依procedure 校正完毕后数字不是零,校正后的使用效果很好.如果有兴趣可以研究研究. 有时机器会show 出以下error: Machine can not be write global memory.这在开机时或者生产过程中都会出现,若在生产过程中出现,机器的message 对话框中所有其它的讯息都不会显示.遇到这种情形,首先要检查PTF,确认是否是PTF 临时断电.如果PTF 电源指示灯正常,我们可以先在Configuration 中将PTF dismounted,再开机看看故障是否依旧.若故障消,则表明故障的真因在PTF;若故障依旧,那么就赶快CALL 厂商吧!\ machine configuration \ parameters \ calibration 改为.BAK.样能有效预防LOAD MACHINE MODLE 时机器读出CALIBRATION 之前的旧文件.硬件配置基本与OS/2路径都不相同.下面的叙述全部针对UPS+:机器会 径来解决,路径是: anual control2或以下版本的另一个BUG,就是有时机器没有Repair 画面出现,可以通过以下步 ter.application.ecovery.f. Left click START.上的介绍非常的详细,经常翻阅一定大有裨益.另外经常和厂商作沟通交流也会受益非浅. 失六、CalibrationCalibration 之前,要确认我们所用的治具以及标准feeder 所上的站别是否和机器中的设置相一致.路径:System setup variables configuration .另外,建议在calibration 之前,还要查看一个文件.路径: C:\ USOS \ MODLE \BEAM1(BEAM2) \ FRHEAD1(REHEAD1) \ MODLE.依照该路径打开后,查看SPINOFF 文件,看他的扩展名是甚么.如果扩展名是.MDL 或.OLD 等,最好先将该类文件更名,将扩展名更这以上叙述都是针对OS/2类型的机器.UPS+机器虽然除VME 以外,其它相同,但是上述的很多操作1.测试ENCODER 读数测试各根轴ENCODER 的详细路径比较繁琐,无法一一到来,从以下给出的路径中可以找到详细的方法: Voyager \ maintenance \ head \ flexjet head \ ASSY \ zero in theta encoder.2.UPS+2.02或以下的版本都存在这样的一个BUG,就是在生产时因为换料或是抛料,自动进入SETUP 模式,而且无法自动退出.这时可以参照以下的路ALT message \ screenSPTR \ MC-readonly m 打开后将Active window 的参数有1改为0.3.UPS+2.0骤来解决:a. Right click my compub. Left click manage.c. Left click service andd. Double click service.e. Right click error r因很匆忙,以上只是比较粗浅的作了个大概的介绍,顺便加入了我的一些经验值.如果想要有更进一步的了解,查看Navigator 或Voyager,这两种manual。