基于CPLD的反电势过零检测电路设计与应用
基于CPLD的反电势过零检测电路设计与应用

萋嚣
20
^Ⅸf.mm’1)
n为电机转速。这样电机转速就正比于瓦在20瑚
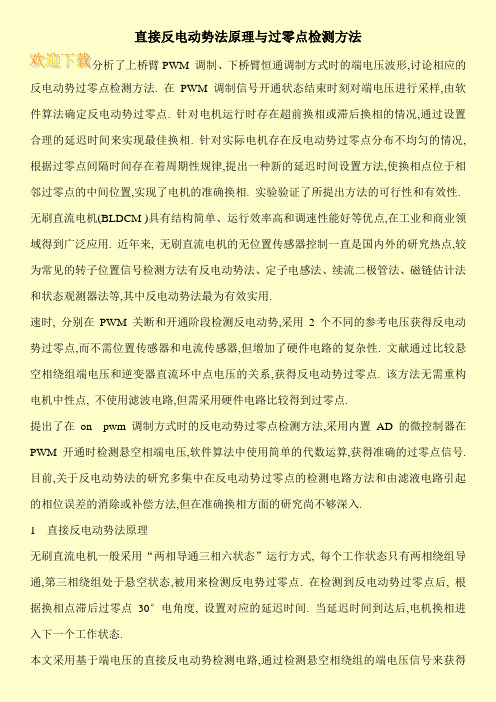
图8效率特性曲线
内的计数值Co。NT;最后制作出与反电势相移角理、 就可达到70%以上,而转速到34 000 r/rain后就可
相位补偿角度p=30。一a、正比于电机实时转速的 以保持在80%以上。对于牙钻电机,25 000 r/min
这样三相信号只要有一相发生变化,在软件中就会
图8是负载转矩固定为80 g·cm时电机的效
产生响应;然后将一计数器%设为每20 ms输出计 数值一次,%的计数值就是在20 m8内|s。发生变化 的次数,记为:
.
n
1
.
n
LOUNT 2 6~0×丽×3 2—1 0—00
率特性曲线。电机效率在转速到25 000 r/min以后
幼驱动搀制, :~…c-已二一,‘留;知矗∥胡岛惕占‘2口’≠一………~…………………-.-………………………………饭……持…电j…棚…………2…0l…o年 …-第一4:期…-.
基于CPLD的反电势过零检测电路设计与应用
胡 类,刘卫国,韩英桃,王燕娜
(西北工业大学,陕西西安710072)
摘要:设计医疗牙钻用无位置传感器无刷直流电动机反电势过零点检测的硬件电路。详细分析反电势经过 滤波后所产生的相移,并提出一种基于CPLD的软件补偿方法。通过实验,证明该电路检测到的反电势过零点信号 有效、可靠,并且相移补偿方法正确、可行。
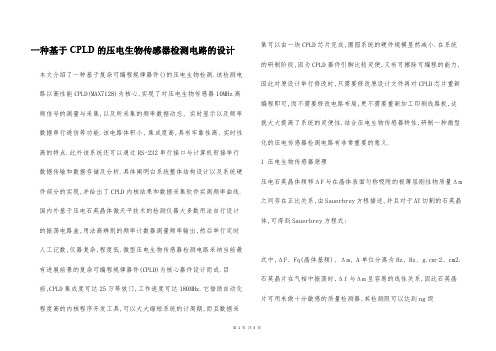
从图9d中,可以清楚地看到反电势检测波形 (矩形波)滞后A相绕组反电势波形(正弦波)小于 300申角摩.为150申角度。
较理想。
4实验结果
;
;
实验样机为稀土永磁无位置传感器无刷直流电
直接反电动势法原理与过零点检测方法
直接反电动势法原理与过零点检测方法分析了上桥臂PWM 调制、下桥臂恒通调制方式时的端电压波形,讨论相应的反电动势过零点检测方法. 在PWM 调制信号开通状态结束时刻对端电压进行采样,由软件算法确定反电动势过零点. 针对电机运行时存在超前换相或滞后换相的情况,通过设置合理的延迟时间来实现最佳换相. 针对实际电机存在反电动势过零点分布不均匀的情况,根据过零点间隔时间存在着周期性规律,提出一种新的延迟时间设置方法,使换相点位于相邻过零点的中间位置,实现了电机的准确换相. 实验验证了所提出方法的可行性和有效性. 无刷直流电机(BLDCM )具有结构简单、运行效率高和调速性能好等优点,在工业和商业领域得到广泛应用. 近年来, 无刷直流电机的无位置传感器控制一直是国内外的研究热点,较为常见的转子位置信号检测方法有反电动势法、定子电感法、续流二极管法、磁链估计法和状态观测器法等,其中反电动势法最为有效实用.速时, 分别在PWM 关断和开通阶段检测反电动势,采用2个不同的参考电压获得反电动势过零点,而不需位置传感器和电流传感器,但增加了硬件电路的复杂性. 文献通过比较悬空相绕组端电压和逆变器直流环中点电压的关系,获得反电动势过零点. 该方法无需重构电机中性点, 不使用滤波电路,但需采用硬件电路比较得到过零点.提出了在on _pwm 调制方式时的反电动势过零点检测方法,采用内置AD 的微控制器在PWM开通时检测悬空相端电压,软件算法中使用简单的代数运算,获得准确的过零点信号. 目前,关于反电动势法的研究多集中在反电动势过零点的检测电路方法和由滤液电路引起的相位误差的消除或补偿方法,但在准确换相方面的研究尚不够深入.1直接反电动势法原理无刷直流电机一般采用“两相导通三相六状态”运行方式, 每个工作状态只有两相绕组导通,第三相绕组处于悬空状态,被用来检测反电势过零点. 在检测到反电动势过零点后, 根据换相点滞后过零点30°电角度, 设置对应的延迟时间. 当延迟时间到达后,电机换相进入下一个工作状态.本文采用基于端电压的直接反电动势检测电路,通过检测悬空相绕组的端电压信号来获得反电动势过零点. 采用分压电阻对端电压和直流侧电压进行同比例分压,使分压后的被测信号落在采样单元允许的输入范围内. 图1 ( a)为主电路和直接反电势法分压电路,端电压UA , UB , UC 和UDC经过分压后分别为Ua , Ub , Uc 和Udc.理想的反电动势波形为正负交变的梯形波,且以电机中心点为参考点,图1 ( b)中, eA , eB , eC 分别表示三相反电动势. 电机在一个周期内共有6个工作状态,每隔60°电角度工作状态改变一次, 每个功率开关导通120°电角度. 工作状态可以由导通的两相绕组和2个功率开关表示,如图1 ( b)所示,BA 表示电流从B 相绕组流入,从A 相绕组流出;Q3Q4 表示B 相上桥臂和A 相下桥臂的2个功率开关导通. 过零点检测波形表示反电动势过零点和换相点, 其中, Z为反电动势过零点, C 为换相点.反电势过零点和换相点均匀分布,彼此间隔30°电角度.2反电动势过零点检测方法无刷直流电机控制可以采用多种PWM 调制方式. 采用的调制方式不同, 呈现的端电压波形也不同. 本文采用上桥臂PWM 调制,下桥臂恒通(H _pwm 2L _on )的调制方式. 以A 相为例, 假设PWM 占空比为50% ,忽略高频开关噪声和换相续流产生的脉冲毛刺,理想的端电压波形如图2 ( a)所示. 在一个周期范围内,将A 相端电压波形划分为BA, BC, AC, AB, CB 和CA 六个区域,每个区域对应一个工作状态. 端电压波形的上升部分和下降部分为BC区和CB 区,此时A 相处于悬空状态.BA 和CA 区为A 相下桥臂开关导通阶段, Q4处于恒通状态, A 相绕组与直流侧电压的负极相连,端电压被钳制到直流侧电压的负极电位. 由于直流侧电压的负极为端电压的参考点,此时端电压为零.AC 和AB 区为A 相上桥臂开关PWM 调制阶段. 以AC区为例,在PWM 开通期间, Q1 和Q2 导通, A 相绕组与直流侧电压的正极相连, 端电压为UDC ;在PWM 关闭期间, Q1 关闭, Q2 导通,由于绕组阻抗呈感性, A 相下桥臂的反并联二极管D4 导通续流,此时A 相绕组与直流侧电压的负极相连,端电压为零.BC和CB 区为A 相悬空阶段,将2个区域各自分为Ⅰ和Ⅱ两个时段,如图2 ( b)所示. 以BC 区为例,此时电流从B 相绕组流进, C 相绕组流出,如图3所示. 图中, RS 和LS 分别表示定子绕组的等效电阻和电感, UN 为电机中心点电压, i为相电流. 忽略功率开关和二极管的正向导通压降, 根据基尔霍夫电压定律可得本文在PWM 调制开通状态结束时刻对悬空相的端电压进行采样. 由于硬件电路存在延时效应,采样时功率开关尚未关断, 相当于在PWM 调制开通期间采样,此时被采样的电压信号受开关噪声影响较小. 根据式( 5) , 当检测到A 相端电压值为直流电压值的一半时, A 相反电动势过零, UA 和UDC /2的比较就相当于eA 和0的比较.反电动势过零点检测方法简单准确,使用软件算法判断反电势过零点. 硬件电路只要选择阻值和功率都合适的电阻用于分压,不需要重构电机中心点,也不需要低通滤波器,信号没有相位延时,也不采用比较器来检测过零点. 硬件电路结构简单, 适合低成本应用.3延迟时间设置方法最佳换相逻辑是指绕组在梯形波反电势的平顶部分导通, 与之对应的最佳换相位置是指在换相完成后,定子磁势超前转子磁势120°电角度,如图5所示. 其中, Fa 和Fr 分别表示定子磁势和转子磁势. 在一个工作状态内定子磁势平均超前转子磁势90°电角度,平均电磁转矩最大.若在换相时刻转子已经转过最佳换相位置,则表现为滞后换相,换相点在时间轴上相对最佳换相位置右移,端电压波形不对称, 右侧的部分波形被湮没,过零点到换相点的延迟时间tZC偏大,如图6所示. 滞后换相时, 转子超过最佳换相位置的角度应小于30°电角度, 若换相严重滞后, 下次过零点将被湮没而检测不到,引起电机失步. 反之,若转子还没有到达最佳换相位置就换相,则为超前换相,换相点在时间轴上相对最佳换相位置左移,端电压的部分左侧波形被湮没,过零点到换相点的延迟时间tZC偏小. 滞后换相和超前换相都会引起电机电磁转矩波动,转子运转不平稳. 实测的端电压波形(通道1)如图7所示,通道2为过零点检测波形,上升沿与下降沿分别对应过零点与换相点.根据过零点超前换相点30°电角度的原理,在检测到过零点后,设置延迟时间tZC确定换相点. 理想运行状态下,过零点与换相点等间隔分布,彼此相差30°电角度. 因此, 可根据过零点的间隔时间来设置延迟时间,传统的延迟时间设置方法是将延迟时间设置为上次过零点到本次过零点时间的一半,如图8所示. 图中, Z ( k) , C ( k)分别表示第k次过零点和第k 次换相点,当检测到第k次过零点时,延迟时间如下设置:式中, TZZ ( k - 1)为第k - 1次过零点到第k次过零点的时间; tZC ( k)为第k次过零点到第k 次换相点的延迟时间.将设置好的延迟时间载入寄存器,计数器开始计时. 到达预设的延迟时间后,电机换相进入下一个工作状态,定子磁势步进一次. 换相点位于相邻过零点的中间位置,电机在最佳换相位置换相,平均电磁转矩最大,端电压波形呈对称状态. 当反电动势过零点分布均匀时,传统的延迟时间设置方法能较好地实现无刷直流电机的无位置传感器控制.4新的延迟时间设置方法反电动势法重在检测反电动势波形上升和下降部分的2个过零点,波形平顶部分对过零点检测方法影响不大. 由于电机制造工艺等方面的影响,实际的无刷直流电机存在三相绕组并不完全对称的情况,导致三相反电动势之间存在差异, 相邻过零点的间隔时间不完全相等, 过零点分布并不均匀.、假设A 相反电动势存在相位偏移, 波形上升和下降部分上的过零点滞后出现,导致过零点在时间轴上分布不均匀. 如图9所示, 虚线表示理想反电动势,实线表示存在相位偏移的实际反电动势,过零点的间隔时间TZZ (1) , TZZ ( 2)和TZZ ( 3)不相等. 每相反电动势波形上升和下降部分的2个过零点相差180°电角度, 过零点间隔时间存在着周期性规律,如TZZ ( 1) =TZZ ( 4) , TZZ ( 2) = TZZ ( 5)和TZZ (3) = TZZ (6) .采用传统的延迟时间设置方法,某些换相点偏离理想换相点较大. 当某次换相严重滞后时,下次过零点容易被湮没,导致电机失步,如图10所示.为使换相点位于相邻2个过零点的中间位置,本文提出一种新的延迟时间设置方法. 如图11所示,过零点的间隔时间TZZ ( k - 3)和TZZ ( k)相等,当检测到第k次过零点时,从第k次过零点到第k次换相点的延迟时间tZC ( k)如下设置:式中, TZZ ( k - 3)为第k - 3次过零点到第k - 2次过零点的时间.当三相反电动势波形的间隔时间长度不是理图11新的延迟时间设置方法想的120°电角度,过零点间隔时间不相等时,采用新的延迟时间设置方法可以使换相更为准确,换相点落在前后2个过零点的中间位置,过零点不容易被湮没,电机运行不易失步,如图10所示. 特别是在电机高速运行时,新方法提高了电机运行的可靠性,实验很好地验证了新方法的可行性和有效性.2种延迟时间设置方法对应的实测端电压波形(通道1)如图12所示,通道2和通道3为过零点检测波形,通道2的上升沿和下降沿对应于过零点,而通道3的上升沿和下降沿分别对应过零点和换相点.图13为实测的三相端电压波形(通道1~通道3) ,通道4的上升沿和下降沿分别对应过零点和换相点.5结论1) 反电动势法通过检测端电压获得反电动势过零点,设置延迟时间得到换相点. 本文采用软件算法获得过零点和换相点, 简化了硬件电路, 适用于低成本应用.2) 超前换相或滞后换相都会导致电机运行不平稳,端电压两侧波形不对称, 通过设置合理的延迟时间,可使电机在最佳换相位置换相.3) 当反电动势过零点分布均匀时, 可采用传统的延迟时间设置方法,即将延迟时间设置为上次过零点到本次过零点时间的一半.4) 当实际电机的反电动势过零点分布不均匀,可使第k次过零点到第k次换相点的延迟时间等于第k - 3次过零点到第k - 2次过零点时间的一半,这一新的延迟时间设置方法,使换相点位于相邻2个过零点的中间位置,实现了电机的准确换相. 实验很好地验证了该新方法的可行性和有效性.。
无刷直流电动机反电动势过零检测法程序设计思路

⽆刷直流电动机反电动势过零检测法程序设计思路2019-08-11摘要:在反电势过零检测法中,对相移问题进⾏分析并加⼊软件位置补偿。
得出合理的补偿⽅式,试⽤性,和精度。
关键词:⽆刷直流电动机反电势 DSP中图分类号:TM33 ⽂献标识码:A ⽂章编号:1007-9416(2014)05-0177-02随着微机控制技术的发展,特别是以单⽚微机及数字信号处理器DSP为控制核⼼的微机控制技术的迅速发展,现代调速系统已进⼊到全数字化的调速系统时代。
根据调速系统⽅案在MPLAB系统开发平台上运⽤汇编语⾔对电机进⾏反电动势过零检测法编程、调试,实现⽆刷直流电动机的数字控制。
1 关于电机参数的计算1.1 调节计算由于驱动系统在采集低速下感应电动势困难,电动机在低于800转/分时相电压难以测量,运⾏很不稳定,通过试验把最低转速定为800转/分。
电动机为5对磁极,电⾓度每转⼀周,即机械⾓度每转72度进⾏⼀次速度计算更新,所以速度调节周期要略⼤于速度计算周期,争取达到速度计算更新与速度调节同步。
本试验设置速度调节周期为15ms。
电流⽐例调节为每0.0001s⼀次,与电机频率相同。
1.2 感应电动势的计算每次PWM时基中断以后对参考电流与三相电压采样⼀次,通过A/D转换转变成数字。
由于在过零点的左右两侧符号不同,可以直接检测不通电相与三相电压和的差值,如果符号变化则说明经过了过零点。
这样我们可以直接⽤3倍的感应电动势减去三相电压和。
1.3 滤除换相⼲扰换相瞬间会产⽣电磁⼲扰,此时检测相电压会产⽣较⼤误差。
⼜因为换相后感应电动势不会⽴即进⼊过零点,所以⼀般会延迟1-2个PWM周期,延迟后再进⾏过零检测。
由于刚换流时B相绕组反电势为负值,因此绕组中性点相对于负极N的电压超过直流母线电压的2/3,⽐换流前的/2要增⼤很多,B相绕组电流会随着⾃⾝反电势减⼩和相电压增⼤⽽加快衰减,特别是转速较⾼时B相绕组电流的衰减将会⾮常迅速。
基于CPLD的PWM控制电路设计说明
2008 年 08 月 04 日
社区交流
介绍了利用硬件描述语言 VHDL 设计的一种基于 CPLD 的 PWM 控制电路,该PWM控制电路具有 PWM 开关频率可调,同侧2路信号互锁、延时时间可调、接口简单等特点,可应用于现代直流伺服 系统。
在直流伺服控制系统中,通过专用集成芯片或中小规模的数字集成电路构成的传 统 PWM 控制电路往往存在电路设计复杂,体积大,抗干扰能力差以及设计困难、设计周 期长等缺点 因此 PWM 控制电路的模块化、集成化已成为发展趋势.它不仅可以使系统 体积减小、重量减轻且功耗降低,同时可使系统的可靠性大大提高.随着电子技术的发 展,特别是专用集成电路(ASIC)设计技术的日趋完善,数字化的电子自动化设计(EDA) 工具给电子设计带来了巨大变革,尤其是硬件描述语言的出现,解决了传统电路原理图 设计系统工程的诸多不便.针对以上情况,本文给出一种基于复杂可编程逻辑器件(CPL D)的 PWM 控制电路设计和它的仿真波形. 1 PWM 控制电路基本原理
‘0'; Q<=Qs; cao<=reset or caolock; end a_counter;
在原理图中,延迟模块必不可少,其功能是对 PWM 波形的上升沿进行延时,而不影响 下降沿,从而确保桥路同侧不会发生短路.其模块的 VHDL 程序如下:
entity delay is port(clk: in std_logic; input: in std_logic_vector(1 downto 0); output:out std_logic_vector(1 downto 0) end delay; architecture a_delay of delay is
基于反电动势过零检测法的无刷直流电机控制原理

基于反电动势过零检测法的无刷直流电机控制原理下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!本店铺为大家提供各种类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you! In addition, this shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!无刷直流电机是目前工业中常用的一种电动机,其具有高效率、结构简单、维护要求低等优点,因此得到了广泛的应用。
一种基于CPLD的压电生物传感器检测电路的设计
一种基于CPLD的压电生物传感器检测电路的设计本文介绍了一种基于复杂可编程规律器件()的压电生物检测.该检测电路以高性能CPLD(MAX7128)为核心,实现了对压电生物传感器10MHz高频信号的测量与采集,以及所采集的频率数据动态、实时显示以及频率数据串行通信等功能.该电路体积小、集成度高,具有牢靠性高、实时性高的特点.此外该系统还可以通过RS-232串行接口与计算机衔接举行数据传输和数据存储及分析.具体阐明白系统整体结构设计以及系统硬件部分的实现,并给出了CPLD内核结果和数据采集软件实测频率曲线.国内外基于压电石英晶体微天平技术的检测仪器大多数用法自行设计的振荡电路盒,用法高辨别的频率计数器测量频率输出,然后举行定时人工记数,仪器复杂,程度低.微型压电生物传感器检测电路采纳当前最有进展前景的复杂可编程规律器件(CPLD)为核心器件设计而成.目前,CPLD集成度可达25万等效门,工作速度可达180MHz.它借助自动化程度高的内核程序开发工具,可以大大缩短系统的计周期,而且数据采集可以由一块CPLD芯片完成,囫囵系统的硬件规模显然减小.在系统的研制阶段,因为CPLD器件引脚比较灵便,又有可擦除可编程的能力,因此对原设计举行修改时,只需要修改原设计文件再对CPLD芯片重新编程即可,而不需要修改电路布局,更不需要重新加工印刷线路板,这就大大提高了系统的灵便性.结合压电生物传感器特性,研制一种微型化的压电传感器检测电路有非常重要的意义.1 压电生物传感器原理压电石英晶体频移ΔF与在晶体表面匀称吸附的极薄层刚性物质量Δm 之间存在正比关系,由Sauerbrey方程描述,并且对于AT切割的石英晶体,可得到Sauerbrey方程式:式中,ΔF、Fq(晶体基频)、Δm、A单位分离为Hz、Hz、g.cm-2、cm2.石英晶片在气相中振荡时,Δf与Δm呈容易的线性关系,因此石英晶片可用来做十分敏感的质量检测器,其检测限可以达到ng级第1页共3页。
一种基于CPLD的电池检测采样控制装置[实用新型专利]
![一种基于CPLD的电池检测采样控制装置[实用新型专利]](https://img.taocdn.com/s3/m/1fa46613fab069dc512201b6.png)
专利名称:一种基于CPLD的电池检测采样控制装置专利类型:实用新型专利
发明人:陈敬谦,梁明
申请号:CN200820206204.0
申请日:20081226
公开号:CN201434904Y
公开日:
20100331
专利内容由知识产权出版社提供
摘要:本实用新型公开了一种基于CPLD的电池检测采样控制装置,包括:主控模块,控制终端,切换模块,DA转换控制模块,AD转换采样模块;所述的切换模块通过IO总线与主控模块连接,切换模块的控制信号输出端连接DA转换控制模块的数字控制信号输入端,DA转换控制模块的模拟控制信号输出端连接控制终端的控制信号输入端;切换模块的采样输入端连接AD转换采样模块的数字采样信号输出端,AD转换采样模块的模拟采样信号输入端连接控制终端的采样信号输出端;切换模块的开关监控端连接控制终端的开关监控端。
相对现有技术优点在于:CPLD其内部逻辑门电路具有集成度高,可以通过内部编程实现实际应用中所需要的各种逻辑、时序信号。
申请人:广州电器科学研究院
地址:510302 广东省广州市新港西路204号
国籍:CN
代理机构:广州知友专利商标代理有限公司
代理人:宣国华
更多信息请下载全文后查看。
反电动势过零点的检测方法

反电动势过零点的检测方法一般的永磁无刷直流电机是由三相逆变桥来驱动的,根据转子位置的不同,为了产生最大的平均转矩,在一个电角度周期中,具有6个换相状态。
在任意一个时间段中,电机三相中都只有两相导通,每相的导通时间间隔为120°电角度。
例如,当A相和B相已经持续60°电角度时,C相不导通。
这个换相状态将持续60°电角度,而从B相不导通,到C相开始导通的过程,称为换相。
换相的时刻取决于转子的位置,也可以通过判断不导通相过零点的时刻来决定。
通过判断不导通相反电动势过零点,是最为常用也最为适合的无位置传感器控制方法。
广告插播信息维库最新热卖芯片:IPS022G FZT953TA LT1108CN8MC74LCX16245DTR2XPC105ARX66CD PDC20265R TPA6011A4PWPR QMV585CT5MX7224LCWN PI5C3306L反电动势过零点的检测方法是,通过测量不导通相的端电压,与电机的绕组中点电压进行比较,以得到反电动势的过零点。
但对于小电枢电感的永磁无刷直流电机,在许多情况下,绕组中点电压难以获取,并且需要使用电阻分压和进行低通滤波,这样会导致反电动势信号大幅地衰减,与电机的速度不成比例,信噪比太低,另外也会给过零点带来更大的相移。
与上面的方法相比,更为常用的是虚拟中点电压法。
假设A相和B相导通,则A和B两相电流大小相等,方向相反,C相电流为零,则根据永磁无刷直流电机数学模型有根据上述方程,将不导通相的端电压与所计算的虚拟中点电压进行比较,也可以获得反电动势的过零点。
这种方法十分简单,实现也比较方便。
但是,由于无刷直流电机按一定频率进行PWM斩波控制,其计算出的虚拟中点电压也会随着PWM的高低电平而发生相同频率的在电源和地电平之间的变化。
这样,就会带来极大的共模电平和高频噪声,会影响反电动势过零点检测的精确性。
同样,和中点比较法一样,这种方法也必须要对绕组端电压进行分压和低通滤波。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
V non
= Va
+ Vb 3
+ Vc
(1)
Enon
= Vnon - Vn
= Vnon
- Va
+ Vb + Vc 3
(2)
由式 (2)可知 ,只要测出三相端电压 ,然后由程序计
算未导通相端电压 Vnon与反电势过零瞬间中点电压 Vn 的差值即可得到未导通相的反电势值 ,当该差值 为零时即表明检测到反电势过零点 。
好 。所以本电路低通滤波部分采用二阶有源低通滤
波器 。 ②滤波电路中电阻 、电容数值的选取 。要保
证系统稳定运行 ,滤波器的输出不仅要求准确 ,不能
漏掉过零点 ,也不能增加过零点 ,而且其相移要小于
30℃。对检测电路中 A、B 两点使用基尔霍夫电压
定理 ,就可以得到低通滤波器的传递函数 ,经过计算
则可得到滤波器的幅频响应表达式和相频响应表达
的 反
芯片 ,该芯片集电机驱动 、调速 、转子位置检测信号
电 势
相位补偿等作用于一身 ,详细分析反电势经过滤波
过 后所产生的相移 ,并提出一种有效的基于 CPLD 的
零 检
软件补偿方法 。最ห้องสมุดไป่ตู้通过样机实验 ,完成硬件电路
测 电
的调试与软件补偿方法的确定 。
路
设 计
1 反电势过零点检测原理
与 应
反电势过零点检测法技术成熟 ,实现简单 ,应用
图 2 反电势检测电路系统
过零检测电路的具体设计方法如下 : ①低通滤
波器的设计 。由于电机调速常采用 PWM 方式 ,反
电势信号中往往含有高频调制信号 ,会影响电压比
较器的正常工作 ,因此需要采用滤波器对端电压信
号进行滤波 。因为反电势频率在 50~600 Hz,在此
低频范围有源滤波器即纹波滤波器的滤波效果较
图 3是根据上述的设计方法所设计的电机 A 相
反电势过零点检测电路 (其余两相与 A 相相同 ) 。
其中 ,前面的电阻 、电容以及运放 U1 共同组成前级 滤波电路 ;电压比较器 U2 接收运放的输出 ,与电机 中线电压比较 ,构成过零点检测电路 ,将反电势波形
转换为方波 ; 最后通过光电耦合输出到控制芯片
路
设
计
与
应
图 5 基于 CPLD 的相移补偿原理图
用
首先将检测出的位置信号 HA 、HB 、HC 逻辑合成为 :
SN = HA HB + HA HC + HB HC
53
D
驱动控制
rive and control
2010年第 4期
实际数值差别很小的器件 ,以便达到三相滤波器相
图 3 电机 A 相反电动势过零点检测电路
移角度一致 ,避免使这一环节成为影响电机运行性 能的不利因素 。
3 基于 CPLD 反电势相移补偿的实现
因为反电势检测电路中存在滤波电路 ,所以会
对反电势信号产生一定的滞后 ,从反电势检测电路
输出的反电势信号比真实的要滞后一些 。当电机转
移 ,就能够得到准确的反电势过零点 ,即换向点 。
接下来的问题就是如何使用控制芯片 CPLD 对
反电势进行相移补偿 。CPLD 作为主控制芯片的优
势在于它的组合逻辑功能强大 ,适合将转子位置信
基 于
号逻辑综合成电机驱动信号 ,并且集成度高 、管脚数
适中 、价格便宜 。但其缺点在于数字计算能力较弱 ,
式 [ 4 ] 。所以电阻 、电容的取值就直接影响到检测电
路的使用效果 ,包括反电势相移角的大小 。综合考
虑本系统后 ,取反电势最大频率 f = 6 000 Hz、通带
增益
K = 1、阻尼系数 ξ = 0.
624
7、转 折 频 率
ω n
=
7ωc。经计算 ,相移控制在 30°以内 。 ③过零检测电
路的设计 。有源放大器和电压比较器分别选用都是
从反电势波形可以看出 ,在未导通相反电势过 零瞬间 ,被导通两相绕组的反电势大小相等方向相 反 ,自 过 零 点 起 延 时 30℃电 角 度 即 可 得 到 换 向 点 [ 4 ] 。这就是反电动势法检测无刷直流电动机转
子位置的基本原理 。
2 反电势过零点检测电路设计
本系统牙钻电机本体已经将中线引出 ,不需要 再通过计算模拟中线电压 ,所以利用反电势检测电 路便可以直接获得反电势信号 。电机本体为 1 对 极 ,调速范围是 3 000~35 000 r/m in,因此反电势的 频率范围就是 f∈ ( 50, 600) Hz。反电势检测电路系
速上升 ,反电势频率越来越高时 ,信号滞后所带来的负
面影响就比较严重。电机表现为高速带负载能力差 ,
并且电流增大很多倍 ,甚至于会出现电机突然停转。
因而要保证系统稳定运行 ,需要对反电势进行补偿。
图 4是实验测得的反电
势频率与相移角度之间的变
化关系 。从图中可以看出 ,
反电势信号的相移随着频率
逐渐增加 。在高转速也就是 图 4 反电动势相移角度
CPLD的 I/O端口进行相移补偿。各器件的取值为 :
R1 = 68 kΩ、R2 = 68 kΩ、R3 = 27 kΩ、R4 = 5. 1 kΩ、R5 = 300Ω、R6 = 5. 1 kΩ。C1 = 0. 01μF、C2 = 470 pF。
需要特别说明的是 ,因为元器件存在一定的误
差 ,而检测电路又是三路 ,所以在选用器件时应挑选
具有四路输入 、输出的 LM224和 LM339。经过滤波
器的反电势信号进入放大器 ,从输出端再进入电压
比较器与电机中线电压比较后输出的信号就是反电
势过零检测信号 。 ④最后 ,反电势过零检测信号经
过光电耦合电路后 ,作为转子位置信号输入到
CPLD 内进行相位补偿 。在这部分电路中应当合理
选择提拉电阻值 ,使光耦电路不至于产生振荡 。
COUN T 0~6 6~8 8 ~11 11~14 14~18 18~21 21~24 24~27 27~31 31~33 33~34 34~34 34~35 35~35 36~36
相移补偿角度 / ( °) 30 27 26 25 24 23 22 21 20 19 18 18 17 16 15
D 2010年第 4期
驱动控制 rive and control
统如图 2所示 。电机的三相反电势从端电压引出后 经过分压 、二阶有源低通滤波器 、过零比较器后获得 检测波形 , 再经过光耦隔离 , 最后送到控制芯片 CPLD 进行相位补偿 。
从表中可以看出 ,相位补偿不是连续的 ,而是在 区间之间跳跃的 。从实验效果看 ,相位补偿效果比 较理想 。
图 8是负载转矩固定为 80 g·cm 时电机的效 率特性曲线 。电机效率在转速到 25 000 r/m in以后
这样三相信号只要有一相发生变化 , 在软件中就会 产生响应 ;然后将一计数器 T0 设为每 20 m s输出计 数值一次 , T0 的计数值就是在 20 m s内 SN 发生变化 的次数 ,记为 :
COUN T
= n ×1 ×3 60 50
=n 1 000
n为电机转速 。这样电机转速就正比于 T0 在 20 m s 内的计数值 COUNT ; 最后制作出与反电势相移角 α、 相位补偿角度 φ = 30°- α、正比于电机实时转速的
COUNT有关的相位补偿表 ,如表 1所示 。
表 1 相位补偿表
电机转速 / ( r·m in - 1 ) 0~6 000
6 000~8 400 8 400~10 800 10 800~13 800 13 800~18 000 18 000~21 000 21 000~24 000 24 000~27 000 27 000~30 600 30 600~33 000 33 000~33 600 33 600~34 200 34 200~34 800 34 800~35 400 35 400~36 000
关键词 :反电势 ;无刷直流电动机 ;无位置传感器 ; CPLD 中图分类号 : TM 33 文献标识码 : A 文章编号 : 1004 - 7018( 2010) 04 - 0052 - 04
D esign and Applica tion of D etecting Zero - Crossing C ircu it of BEM F Ba sed on CPLD
HU Yan, L IU W ei - guo, HAN Y ing - tao, WAN G Yan - na (Northwestern Polytechnical University, Xi’an 710072, China)
Abstract: This paper p resents the design of detecting zero - crossing circuit of BEMF in the sensorless BLDCM of tooth drill. The phase shifting which the filter brought to the circuit was analyzed in detail. A kind of software method of phase com2 pensation was p roposed based on CPLD. A t last, the experiment p roves that the zero - crossing signals of BEMF which are de2 tected by the circuit are available and reliable, and that the method of phase compensation is viable and correct.