无刷直流电机反电势过零法无传感器控制
反电动势法无位置传感器无刷直流电动机控制原理

反电动势法无位置传感器无刷直流电动机控制原理1. 引言大家好,今天咱们来聊聊一个有趣又复杂的话题,那就是无刷直流电动机的控制原理。
听起来可能有点深奥,但别担心,我会尽量把它讲得简单易懂。
你知道吗,这种电动机在生活中可是随处可见,比如咱们的电动车、风扇,还有玩具车,真是名副其实的“万金油”啊!而说到控制这些电动机,反电动势法可谓是个绝妙的选择。
好,我们不啰嗦,赶紧进入正题吧!2. 无刷直流电动机的基础知识2.1 什么是无刷直流电动机?首先,得给大家科普一下,什么是无刷直流电动机。
顾名思义,这种电动机没有传统的刷子。
传统电动机就像一位大厨,得靠刷子来翻炒食材,而无刷电动机就像一台现代化的烤箱,省心又省力。
它的工作原理是通过电磁场的变化来驱动转子运动,这样一来,就能减少摩擦,降低能耗,噪音也小,真是个“安静”的家伙!2.2 反电动势是什么?接下来,我们聊聊反电动势。
这个名字听起来很吓人,其实它就像是一位“调皮的小鬼”,在电动机工作时,会逆着电流的方向产生一种电压。
这种反电动势就像是电动机在努力工作时,给自己制造的一种保护机制。
就好比一个人努力跑步时,突然感到累了,身体会自然而然地减速,反电动势就是这种“减速”效果的体现。
3. 反电动势法的控制原理3.1 如何实现控制?那么,反电动势法到底是怎么控制电动机的呢?其实,这个过程简单得令人惊讶。
控制器会实时监测电动机的反电动势,通过这个信号,判断电动机的转速和位置。
就像一个教练在旁边观察运动员的表现,根据运动员的状态调整训练方案。
这样一来,电动机就能在没有位置传感器的情况下,精准地控制转速,真是一举两得。
3.2 优势与挑战使用反电动势法的好处可多了,首先,省去了位置传感器这个“累赘”,降低了系统的复杂性,成本也随之降低。
其次,由于没有刷子,电动机的寿命大大延长,维护起来也更方便。
不过,挑战也是有的。
比如,启动时电动机的反电动势比较小,控制器可能一时之间“抓瞎”,这时候就需要一些聪明的控制算法来帮忙。
无位置传感器直流无刷电机的退磁控制

1 引 言
随着电力电子器件及控制理论的迅速发展 ,永 直流无刷电机以其高效性 ,良好 的调速性 ,易于维护 性而得到了广泛的应用。一般的无刷直流电机采用位 置传感器进行位置检测 ,由于位置传感器存在安装复 杂, 硬件成本高,传感器精度不够以及环境条件敏感 等不利因素,使得整个系统的可靠性得不到保证 。因 此无位置传感器控制成为无刷电机控制研究的热点 。 本 文 主要针对 三相六 步 驱动 模式 的无 位置 传感 器 直流无刷电机 , 采用反电势过零检测法进行转子位置 检测 , 具体分析了反电势过零检测前的退磁过程 , 并 提出了加速退磁过程的 P WM 控制方法 。
示。
L ‘I q & 岛 岛
\j 3/ O 。 0 D 。
1 2 \
目, 。
/0 。
/
\O 。
2\ 4\ :l 0{ 。
2 退磁与反 电势过零检测 的关系
无刷 电机 主控 回路如 图 l 示 。 所
l 0 / 0
i
\ 。
\ .
1 / 8 I 0 。
I \
/ 。 3 6 I o o
图2 绕组反向电动势和 电流波形
由图2 以看 出,30电角度f ̄6 可 6。 f 步,每6。 0电角 度换相一次。在6 。 0电角度范围内,换相之后 的3。 0电 角度处为断电相绕组的反相电动势过零点 ,通过检测
无位置传感器直流无刷 电机一般为三相六步驱动 模 式 ,三相 定子绕 组为 星型连 接 ,采用 两两通 电方 式 , 每一个瞬间有两个功率管导通 , 每隔6 。 0电角度换相一 次 ,功率管导通顺序为 : T , O 1 5 TT , T , . , l I 3 T ,T T ,各绕组反向电动势和电流波形如 图2 4 45 所
(完整版)无刷直流电动机无传感器控制方法

无刷直流电动机无传感器低成本控制方法关键词:无刷直流电动机无位置传感器控制可编程逻辑器件1引言无刷直流电机的无传感器控制是近年来电机驱动领域关注的一项技术。
无位置传感器控制的关键在于获得可靠的转子位置信号,即从软、硬件两个方面间接获得可靠的转子位置信号来代替传统的位置传感器[1~3]。
采用无传感器控制技术的无刷电机具有结构简单、体积小、可靠性高和可维护性强等优点,使其在多个领域内得到了充分的利用[4]。
目前对于无传感器无刷电机的控制多采用单纯依靠DSP软件控制的方法[5],但是由于控制算法计算量大,执行速度较慢,且DSP成本较高,不利于以后向市场推广。
同时也出现了应用于无传感器BLDCM控制的一些专用的集成电路[6],但由于这些芯片可扩展性和通用性较低,而且价格昂贵,只适用于低压、小功率领域。
为了扩展无传感器BLDCM应用领域,降低其控制系统的成本,扩充控制系统的功能,增加控制系统的灵活性,本文以MCU+PLD方式组成控制系统的核心,利用PLD数字逻辑功能,分担MCU 的逻辑运算压力,使MCU和PLD的功能都得到了最大程度的发挥。
对于无位置传感器BLDCM控制系统,本文着重分析了换相控制策略和闭环调速,最后通过仿真和实验,验证了控制系统的合理性和可行性。
2系统的总体硬件设计本文中所设计系统是以8位PIC单片机和PLD构成的硬件平台,硬件结构框图如图1所示。
功率逆变电路采用三相全桥逆变结构,电机定子绕组为Y接法,电机工作模式为三相6状态方式。
在本文无传感器控制方式中采用反电动势过零位置检测方法,位置检测电路根据电机端电压获取3路位置信号,将信号送入PIC单片机进行软件移相后得到3路换相信号,由可编程逻辑器件进行逻辑解码后输出6路驱动开关管的前极信号,通过驱动芯片IR2233产生驱动信号以控制各开关管的导通与关断。
该系统采用速度单闭环方式,通过改变PWM的占空比以达到调速的目的。
本文中选用Microchip 公司的单片机PIC16F874作为控制核心,它内部有8K的FLASH 程序存储器,368字节的数据存储器(RAM),256字节的EEPROM数据存储器,14个中断源,8级深度的硬件堆栈,3个定时/计数器,两个捕捉/比较/PWM (CCP)模块,10位多通道A/D转换器等外围电路和硬件资源⑹。
无刷直流电机反电势过零检测新方法
无刷直流电机反电势过零检测新方法摘要:采用的无位置传感器的无刷直流电机在高速反应阶段,由于电磁场效应产生的反电势信号过于强大,造成的检测电路无法正常工作,甚至会因为反电势而产生无法弥补的损坏。
相反在低速运转阶段低电势信号较弱,从而无法进行捕捉检测。
基于此,提出一种解决在极端速段问题的反电势过零检测新方法。
经过试验验证,采用三相采样等效电路,在该电路上并联一组晶体管来控制电阻分压器开关电路。
参照电机的特性,可以根据特性调整控制信号的信噪比和占空比,从而实现晶体管的通断进而调节电阻分压开关所形成的电阻值的变化,避免电势过高出现检测危险或者是电势过低检测不出来的问题。
关键词:无刷直流电机引言无刷直流电机具备以下几个特点:体积小、质量轻、效率高、损耗小。
因为这些优点使得无刷直流电机得以广泛的应用,从而进入了航空、控天、机械、汽车等各个工业领域,同时也进入了空调、冰箱、电动汽车等日常生活领域。
按照常理来说,无刷直流电机一般是通过位置传感器来实现确定电机中转子部件的位置,但是这也会出现一个问题,安装位置传感器得不偿失、消耗巨大,使得系统成本大大提高,同时也使得相对简单的系统变得复杂。
在遇见突发情况的时候,对于特殊情况的抗干扰能力会大大降低,可靠度变低。
基于以上的问题,在文章中提出一种适应低俗运转阶段能够有效改善现有的反电势过零检测状况的新方法,它能够在高速运转阶段保护原有电路不受电势过高产生的损害。
一、反电势过零中运用到的基本原理采用的无位置传感器大多是运用了两两导通和三三导通两个工作方式。
这两种方式具有多种特点。
两两导通中采用无刷直流电机在随意的时刻都有亮相电源导通,梁歪一箱电源缠绕着出于半空中。
三三导通则是每一个逆变瞬间都使用三个功率相同的元部件来进行导电。
在文章中将使用前者方式,功率开关管着六个开关组合,每个六分之一的周期进行一次轮换,每次仅更换一个功率开关组合,每个功率开关导通的电度角为120度。
电机采用顺时针的态势时,将所使用的转子按照360度电度角进分布在六个区域中,不同区域会采用不同的功率组合。
无刷直流电动机的反电势过零检测法研究
0 引 言
研究 人员 提 出 了多 种 无 位 置传 感 器 无 刷 直 流
电动机 转 子 位 置 检 测 的方 法 ,如 :反 电 势 法 、扩
、 、
~
—
—\
~
—
一
∞
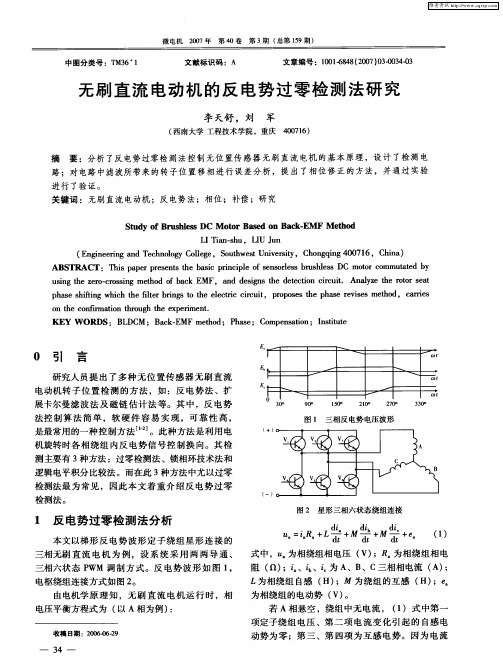
展 卡尔 曼滤 波 法 及 磁 链 估 计 法 等 。其 中 ,反 电势 法控 制 算 法 简 单 ,软 硬 件 容 易 实 现 ,可 靠 性 高 , 是最常 用 的一 种 控 制 方 法 _ 。此 种方 法 是 利 用 电 1 机旋转 时 各 相 绕 组 内反 电 势 信 号 控 制 换 向。其 检 测主要 有 3种 方 法 :过 零 检测法 、锁相 环技 术法 和 逻辑 电平积 分 比较法 。而 在此 3 方 法 中尤 以过零 种 检测法 最 为 常 见 ,因 此 本 文 着 重 介 绍 反 电势 过 零
三相六 状 态 P WM 调 制 方 式 。反 电势 波 形 如 图 1 ,
U + +警 肘 + ( a. £ 肘 +鲁 e = + a 1 i“ + ) R 警 a
式 中 ,u 为 相绕 组相 电压 ( ;R V) 为相 绕 组相 电
阻 ( ;i b A、B Q) 、i为 、C三相 相 电流 ( ; A)
无刷直流电动机的反电势过零检测法研究
李天舒 刘
军
的大小 相等 、方 向相 反 ,因 此 这 两 项 互 感 电 势 相 互 抵消 。即 当 A 相 绕 组 悬 空 时 ,电 压平 衡 方 程 式 可化简 为 :
・---— —
若 A相 悬空 ,绕组 中无 电流 , ( )式 中第 一 1 项定 子 绕 组 电压 、第 二 项 电 流 变 化 引 起 的 自感 电
动 势为 零 ;第 三 、第 四项 为 互感 电 势 。 因 为 电 流
直流无刷电机无位置传感器控制中反电动势过零检测算法及其相位修正
直流无刷电机无位置传感器控制中反电动势过零检测算法及其相位修正上海大学 张相军 陈伯时 朱平平上海新源变频电器有限公司 雷淮刚 摘要:针对具有梯形反电动势波形的直流无刷电机无位置传感器的控制,文章提出了一种软件实现的方法,给出了算法,并通过实验验证了这种方法的正确性和可行性。
关键词:梯形反电动势 直流无刷电机 无位置传感器控制 软件实现Zero-crossing Algorithm and Phase C orrection of BEMF in theSensorless Control of Trapezoidal BLDC MotorsZhang Xiangjun Chen Boshi Zhu Ping ping Lei Huaigang Abstract:In this paper,a softw are method an d an algorithm are put forw ard for th e sensorles s trapezoidal brus hless DC m otor.T he experimen tal results s how that the advanced m ethod is correct and feasib le.Keywords:trapez oidal BEM F br ushles s DC motor sensorless control softw are-realiz e1 引言直流无刷电机实际上是一种永磁同步电机,其转子采用永磁材料励磁,体积小、重量轻、结构简单、维护方便、运行可靠,且具有高效节能、易于控制等一系列优点,已广泛应用于办公自动化设备、计算机外围设备、仪器仪表和家用电器等领域[1]。
无位置传感器控制技术的提出,解决了传感器的难于安装和维修等一系列弊病,在小容量、轻载起动条件下,无位置传感器无刷直流电机成为一种理想的选择,并具有广阔的发展前景。
电动车用无刷直流电机无位置传感器控制

摘
221) 103
要 :针对传统无传感器控制策略计算量大 、可靠性不高 、3 。 0 软件延 时等 缺点 ,基 于无刷 直流 电机反 电势过零
检测 的原理 ,分析 了三相端 电压与中性点的关 系 ,提出一种 可完 全替换 3相霍尔位 置传感器 的硬 件设计方案 ,实 现
电机 的无传感器运行 。同时在硬件电路中设计了相位 自补偿电路 ,克服以往传统方 法相位补偿不 准确 ,电机无法稳
l ms t a h h s o e h tt e p a e c mpe s t n i o c u a e a h y tm a o f c e ty r . De e o e r t— n a i s n ta c r t nd t e s se c n n tef in l un o i v lp d a p o o tp l t r by CY8C2 3 rc n rlc p a d d x e i n s,t e e p rme t lr s ls v rfe h tt y e p a f m o 45 3 f o to hi n o e p rme t o h x e i n a e u t ei d t a he i
无位置传感器直流无刷电机控制的研究
护程 序 ,旁路 电阻 R 7主要 用来 对 电路 电流 进行 采
作吉简介:庄乾成 (9 7 17 一) ,男,讲 师,硕士研究生 ,研究方向为智能仪器与测控技术 。 [ 8 第3 卷 91 3 第8 期 2 1— ( ) 01 8下
l
匐 化
图 2 无刷 直 流 电机 驱 动 电路 示 意 图
个 周期 转动 。
B
1 无刷直流 电动机 工作原理
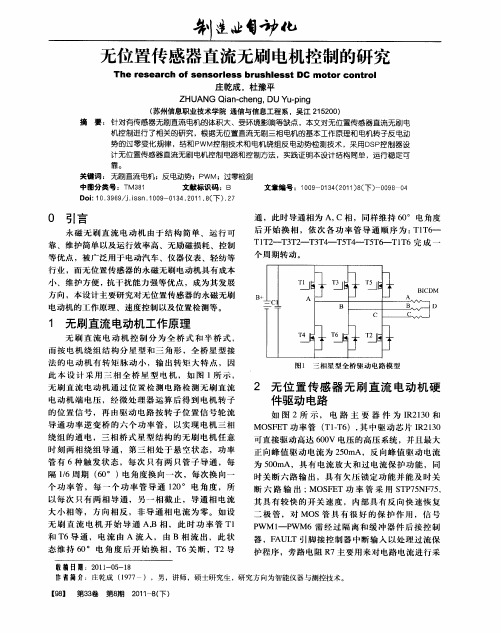
无 刷 直 流 电动 机 控 制 分 为 全 桥 式 和 半 桥 式 , 而按 电机 绕 组 结 构 分星 型 和三 角形 ,全桥 星型 接 法 的 电动 机 有 转 矩 脉 动 小 ,输 出转 矩 大 特 点 , 因 此 本 设 计 采 用 三 相 全 桥 星 型 电 机 ,如 图 l所 示 ,
为 50 0 mA,具 有 电流 放 大 和过 电流 保 护 功 能 ,同
管 有 6种 触 发 状 态 ,每 次 只 有 两 只 管 子 导通 ,每
隔 1 / 期 (0 6周 6 。)电角度 换 向一 次 ,每 次换 向一
个 功 率 管 ,每 一 个 功 率 管 导 通 10 电 角度 ,所 2。
样 ,阻值 为 4 Q, 转 化为 电压 信 号后 需 经过 放大 8 其
一
无 刷 直 流 电 动机 通 过 位 置 检 测 电 路 检 测无 刷 直 流
图 1 三 相 பைடு நூலகம் 型 全桥 驱动 电路 模 型
电动 机端 电 压 ,经 微 处 理 器 运 算 后得 到 电机 转 子 的 位 置 信 号 ,再 由驱 动 电 路 按 转子 位 置 信 号 轮 流 导 通 功 率逆 变桥 的六 个 功 率 管 ,以实 现 电机 三 相 绕 组 的通 电 ,三 相 桥 式 星 型 结构 的无 刷 电机 任 意 时 刻 两 相 绕 组 导通 ,第 三 相 处 于 悬 空 状 态 ,功 率
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
无刷直流电机反电势过零法无传感器控制
作者:张敏
来源:《装饰装修天地》2017年第21期
摘要:无刷直流电机具有良好的线性调速、高质高效平滑运转特性,结构简单,体积小,重量轻,效率高,功率因素高,转矩/重量比高,转动惯量低,易于散热,易于维护保养等优点,因此应用范围相当广泛。
随着电力电子器件的迅速发展,直流无刷电机利用电子换相器件取代了机械电刷和换向片,极大地提高了工业制造以及相关自动化电力系统部门的生产效率与质量,同时也伴随着应用领域需求的不断扩大,对无刷直流电机设计要求也越来越高。
关键词:无刷;直流电机;反电势;过零法;无传感器控制
1 引言
无刷直流电机具有良好的线性调速、高质高效平滑运转特性,结构简单,体积小,重量轻,效率高,功率因素高,转矩/重量比高,转动惯量低,易于散热,易于维护保养等优点,因此应用范围相当广泛。
随着电力电子器件的迅速发展,直流无刷电机利用电子换相器件取代了机械电刷和换向片,极大地提高了工业制造以及相关自动化电力系统部门的生产效率与质量,同时也伴随着应用领域需求的不断扩大,对无刷直流电机设计要求也越来越高。
这些无位置传感器位置检测技术各有优缺点和适用场合,但因反电势检测法具有线路简单、技术成熟、成本低、简单易行、可靠等众多优点,所以反电势检测法成为比较理想且应用最多的无位置传感器无刷直流电机控制方法。
2 无刷直流电机概述
应对环境保护标准,汽车的能效法规日益严格;消费者对节能、安全、便捷和舒适度提出更高的要求,都推动汽车功能电子化趋势日益加强。
目前的汽车已不再是当初单纯的机械产品,已成为复杂度足够高的机电一体化产品。
国际汽车权威组织预测,至2020年,一辆豪华车中的电机数量可多达120台。
无刷直流电机具有优异的性能,能实现更高的能效和性价比,在数字电子技术飞速发展过程中,无刷直流电机被整合至汽车的执行元件中,如散热风扇、暖通空调(HVAC)、刮水器、燃油泵、水泵、油泵、座椅风扇和混合动力系统等部件里。
无刷直流电机(英文为Brush less DC Motor,简写为BLDC)属于一种极典型的机电一体化的基础产品,作为执行元件的电机与其控制装置紧密关联,构成能完成复杂功能的自动化器械。
无刷电机中无电刷和换向器或集电环一类的机械构件,由晶体管电路电子换向将交流转换为直流,以及直流逆变为交流。
无须顾忌磨损、粉尘、噪声、火花和高强度的电磁干扰,并为汽车内特定的应用提供良好的无级变速控制。
国际汽车权威组织称,无刷电机显著地提升燃油
能效和燃油经济性,节省60%~70%的能耗;无刷电机用于电动助力转向(EPS),行驶距离会增加3%~5%;用于电动水泵(EWP)及电动油泵(EOP),提升约1%~3%的能效。
无刷电机是成熟于20世纪末的新产品,由于它高效、低噪、免维护、高可靠等种种优势,正快速普及至家用电器、医疗器械、工业自动化设备仪器仪表和航天航空,自然也有汽车行业。
与有刷直流电机和感应电机相比,BLDC优势显著,包括:极佳的转矩-转速特性,高速的动态响应,高效率,极宽的无级可调的转速范围,运转无噪音,高可靠性,使用寿命长。
3 反电势法最佳换相逻辑分析
从换相理论方面来说,反电势过零检测法其实就是在检测到反电势的过零点后进行30°的延迟以作为下一组绕组的換相点。
同时还应该对逆变器的触发顺序进行有效的控制,从而使得相电流与反电势的相位一致,在反电势波形的平顶部分导通该相绕组,实现电机的“最佳换相逻辑”。
当电机达到“最佳换向逻辑”时,可使电机绕组获得最大利用率,使电机具有较大转矩和较小转矩脉动,此时电机的稳定性最好,达到电机最佳运行。
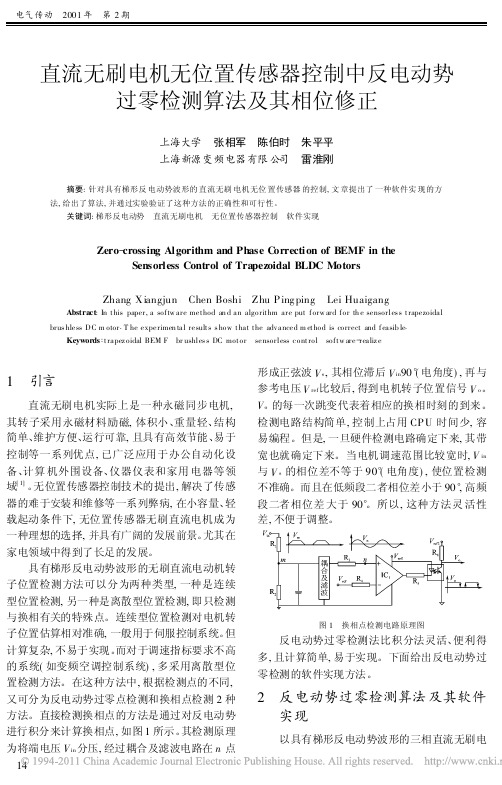
由于系统采用脉冲宽度调制(PWM),所以终端电压的检测有大量的斩波器组件,将干扰与反电势波形,使零是不明确的,它在反电动势电路滤波电容通常是必要的。
然而,非线性元件的引入不可避免地会产生相移,为了实现无刷直流电动机的“最佳换相逻辑”,必须在移相动态相位补偿中生成软件。
检测电路如图1所示。
4 无传感器控制技术
无刷电机转子位置可以通过霍尔传感器或无传感器获得。
利用软件编程结合硬件电路获得关键转子位置信号,是无传感器控制技术的主要思想。
没有传感器控制的方法也很多,下面以方框图的形式简要介绍了主要的三种方法:
(1)反电动势积分法;(2)反电动势过零法;(3)续流二极管的方法。
续流二极管的方法。
无传感器控制技术,减小了电机设计的难度,虽然电机低速运行时,其反收购的影响,电机开始需要一些帮助,但抗干扰能力强,可在潮湿,高温,温度变化等环境中,在无刷电机的突出优点。
反电动势过零法简单实用,但其过零捕获直接影响控制系统能否稳定运行。
对于三相六状态,和方波驱动的无刷电机反电动势波形为梯形波,而其平顶宽度120°电角度,电机具有良好的换向作用,方波电流的相位作为反电动势相同,与绕组匝数准确的梯形波顶。
5 结束语
总而言之,随着科技的不断进步,无刷直流电机及其控制会得到更好的发展,在其性能的提高和功能的改善上都将会有一个质的突破。
虽然说它集各种电机的优点于一身,并且在现今的各大领域都在进行着广泛的使用,但是还存在着一些问题亟待解决,我们相信随着微电子技术和相关技术的发展能够使这些问题得到解决,让人们的生活更加的便利,使我国国民经济的发展也更加的蓬勃向上。
参考文献:
[1] 郭丹蕊,林晓焕,单星,汪通.基于DSP的无刷直流电机控制系统研究[J].国外电子测量技术,2016(2):98~101.
[2] 温嘉斌,麻宸伟.无刷直流电机模糊PI控制系统设计[J].电机与控制学报,2016(3):102~108.
[3] 宋哲,王友仁,鲁世红,王强.一种电动车用无刷直流电机混合回馈制动控制方法[J].电工技术学报,2016(6):74~80.
[4] 罗斌.无感无刷直流电机控制器的研究[D].湖南大学,2016.
[5] 李同豪.无刷直流电机无位置传感器矢量控制技术研究[D].南京航空航天大学,2016.。