基于RFID技术导盲机器人室内路径规划的研究
RFID技术在机器人室内定位中的应用

RFID技术在机器人室内定位中的应用作者:李辰迪王艳新来源:《中国教育技术装备》2013年第24期摘要介绍一种辅助家用机器人在室内确定所处位置的方案。
方案构思是在地面上铺设电子标签坐标网络,通过安装在机器人身上的RFID(无线射频)识别装置感应标签信息,进而得到对应的地理位置坐标。
关键词 RFID无线射频技术;机器人;室内定位;单片机中图分类号:TP391.4 文献标识码:B文章编号:1671-489X(2013)24-0037-021 引言现如今,越来越多的机器人被应用到人们的生活生产中去,诸如清洁机器人、安防机器人等。
绝大多数机器人都工作在室内,在他们执行任务时,往往会由操作员给定一个路径,机器人会按照该路径来行驶到指定位置。
但行驶过程中各种不可测的因素都会影响实际的路线。
故如何保证机器人能够按照给定路径行驶的问题就被提出了。
由于工作在室内,常用的户外GPS定位系统无法工作。
继而,需要设计一种能够帮助机器人进行室内定位的系统。
本文介绍的一种室内定位方案采用RFID(射频识别)技术,通过组建物理坐标网络为机器人提供可靠的地理位置信息。
该方案成本低,实施容易,可靠性高,具有较大的实用价值。
2 方案构思本方案的灵感源自于公共场所地面上铺设的盲道——盲人能够通过感触盲道上的凸点来辨别路径,与之类似,通过有规则地铺设机器人的“盲道”——电子标签坐标网络,机器人便能够辨别所处的方位。
方案示意如图1所示,建立二维直角坐标系X0Y,蓝色圆点为电子标签。
假设左下角为原点,则该标签定义为(0,0)。
设步长均为1,则可定义坐标系上任意标签的坐标(x,y)。
每当机器人运动到某个标签的上方时,便可获得一个坐标信息;收集到两个坐标信息后,便可计算出运动大致方向;或者通过指南针传感器辨别下一刻路径方向。
3 方案实现3.1 硬件方案目前市面上与RFID相关的设备有很多,应用广泛,技术成熟,成本较低的有MFRC522芯片的方案,和与之配套的ISO 14443A、MIFARE系列标签。
基于RFID技术的室内机器人定位方法的研究
基于RFID技术的室内机器人定位方法的研究曾衍䶮—同济移动嵌入式中心,上海201804)(同济大学软件学院微软——摘要:近年来,随着RFID技术的日益成熟,它在机器人领域的应用变得越来越广泛而深入。
文章首先分析了RFID技术在室内环境下应用于移动机器人自我定位的可行性,然后描述了使用蒙特卡罗概率统计模型对机器人附近的RFID标签进行方位定位的过程,并且阐述了利用在此过程中获得的数据对自身或者特定物在特定环境下进行方位定位的方法,最后文章分析了此技术在某些特定场合进行应用推广的可行性和前景。
关键词:LegoNXT机器人;RFID;标签;方位定位;概率统计模型中图分类号:TP242文献标识码:A文章编号:1009-3044(2008)07-11346-04ResearchonRFID-BasedPositionMethodforIndoorRobotZENGYan-yan(Microsoft-TongjiMobileandEmbeddedCenter,SchoolofSoftwareEngineering,TongjiUniversity,Shanghai201804,China)Abstract:Inthispaper,theMote-CarlolocalizationandtheFastSLAMalgorithmareappliedtolocalizeatagwhichisbasedonRFIDtechnologywithamobileLegoNXTrobotequippedanultrasonic-sensor.Duringthisprocess,wedemonstratehowaRFIDtagisdetect-edandlocalizedinitsenvironment.Finally,wediscusstheforegroundofsuchlocalizationmeasurementbasedonRadioFrequencyIdenti-fication(RFID)technologyinourdailylife.Keywords:LegoNXTRobot;RFID;tag;localization;statisticalestimate1引言RFID,全称为RadioFrequencyIdentification,即无线射频识别,它是一种通过发射无线电磁波来识别人或者物体的技术。
基于RFID的室内定位技术研究

基于RFID的室内定位技术研究作者:褚明杰梁春美来源:《无线互联科技》2015年第05期摘要:RFID(射频识别技术)以其非视距,非接触,多目标,低成本,效率高,识别速度快,定位精度高等特最而逐渐成为一颗耀眼的“定位新星”。
文章先介绍了RFID系统的发展状况,然后按各主要组件介绍其分类及功能,阐述RFID系统工作原理,提出了RFID常用技术的应用,同时对RFID技术未来的发展趋势进行展望。
关键词:室内定位;RFID;研究;应用1无线射频识别系统阅读器(Reader),电子标签(Tag),定位算法及数据处理终端四部分组成了一个完整的RFID系统。
阅读器主要分手持式和固定式两种,其又称为读写器或扫描器,在整个系统中扮演着重要角色,是RFID系统的信息控制和分析处理中心,可以为单独个体,也可嵌入其他系统中,可无接触地读取和识别电子标签中的数据内容,如图1所示。
电子标签按其内部有无电源提供能量分为有源标签,半有源标签和无源标签等,按工作频率不同又可分为为低频,高频,超高频,微波等。
其作用首先是保证物品信息的安全性和完整性,其嵌入内部的芯片可对接收信号进行解码、解调,将信号进行编码与调制,反馈给阅读器,从天线收集阅读器辐射到空间并发送出去。
其原理如图2所示。
关于定位算法,目前RFID定位的开发多以主动式为主,室内环境下无线信号易折射、反射和发生严重的多径效应,故目前还没很好的室内环境下信号传播模型。
除位置指纹算法外,在室内定位中还使用三角定位算法及邻近算法,分别属于基于场景定位、基于测距定位和邻近算法定位。
2RFID系统的基本工作原理文章以较常见的RSSI为例进行阐述。
采用此方法时,基站要能够覆盖室内整个范围,当某个标签临近某基站时,此基站获得信号强度就最强,依据相近优先原则,就能容易判断它的位置,如图3所示。
3常用技术分析电子标签的工作频率决定了整个系统的工作频段,现将不同频率的系统技术参数比较如表1所示。
基于RFID手持式盲人导航系统的路径规划
基于RFID手持式盲人导航系统的路径规划王震;方漫琳;林欣农【期刊名称】《计算机工程与设计》【年(卷),期】2012(33)5【摘要】提出了一种物联网技术下盲人导航系统的路径规划算法.采用Dijkstra最短路径算法作为基础算法,以关系数据库作为存储模式,通过多因素模糊算法来确定道路网络中的权值,并根据道路网络的空间分布特性,合理利用矩形限制搜索算法来限制搜索范围.结合算法在盲人导航系统中的应用,给出了算法的应用实例,仿真实验和实例分析结果表明了算法的正确性.%A route planning algorithm for blind navigation system with internet of things technolog is proposed. By using shortest-path algorithm as a basic algorithm, relational database as the storage mode, combining with the multi-factor fuzzy algorithm to determine the road network weights, and using the spatial distribution feature of the real road network, the searching area is restricted reasonably with restricted rectangle searching area algorithm. Combining with its practical applications in blind navigation system. An actual example is given, and this method is validated by an example and emulator.【总页数】5页(P2063-2067)【作者】王震;方漫琳;林欣农【作者单位】北京理工大学珠海学院计算机学院,广东珠海519085;北京理工大学珠海学院计算机学院,广东珠海519085;北京理工大学珠海学院计算机学院,广东珠海519085【正文语种】中文【中图分类】TP301.6【相关文献】1.基于RFID盲人导航系统 [J], 周天剑;王震;姚沁;许鸿锦2.基于四旋翼的盲人导航系统设计 [J], 宣茜;徐德斌;刘宜帅3.手机惯导与RFID的盲人导航系统设计与实现 [J], 郇战;陈学杰;梁久祯4.基于STM32的盲人导航系统设计 [J], 朱鑫; 黄艳; 高飞跃; 徐玉琴; 陈云梅5.基于STM32的盲人导航系统设计 [J], 朱鑫;黄艳;高飞跃;徐玉琴;陈云梅因版权原因,仅展示原文概要,查看原文内容请购买。
一种室内导盲机器人的RFID-语音交互系统设计

种室 内导盲机器人 的 R F I D- 语音交互 系统设计
靳祖光 , 等
一
种 室 内导 盲 机 器 人 的 R F I D . 语 音 交 互 系统 设 计
ቤተ መጻሕፍቲ ባይዱ
De s i g n o f t h e RF I D— b a s e d Vo i c e I n t e r a c t i on S y s t e m o f I n d o o r Gu i d e R o b o t f o r t h e Bl i n d
统将 标 签作 为语 音启 动的触 发信 标 , 并 设计 其具 体布 局结 构 ; 同时应 用 L D 3 3 2 0中文 语 音识 别芯 片 , 通过 非 特 定人 声 搜 索 引擎 和 特征 库计 算 出识 别结果 。机 器人 样机语 音交 互 系统可 完成 对用 户和 环境状 态信 息 的语音 问答 。不 同语 速 、 关键 词 的延 时 时 间和识 别 率 的
测试 和统 计 表 明 。 该 系统可 以满 足语音 交互 的基 本需 求 。 关 键词 :导 盲机器 人 R F I D 语音触 发标 签 L D 3 3 2 0 语音 控制 语 音交互
中图分 类号 :T P 2 4 2 + . 3 文献标 志码 :A
Abs t r a c t :W i t h t h e g u i d e r o bo t f o r b l i n d a s t h e r e s e a r c h c a r r i e r -t h e v o i c e i n t e r a c t i o n s y s t e m ba s e d o n t h e c o mb i na t i o n o f RF I D a n d s p e a k e r —
基于RFID的盲人导航系统路径搜索设计与实现

基于RFID的盲人导航系统路径搜索设计与实现此文档为WORD格式,下载后可随意编辑2017年9月修订基于RFID的盲人导航系统路径搜索设计与实现摘要随着城市人口数目的增加,盲人这个特殊的群体也越来越受人们的关注,盲人的出行一直是困扰盲人的问题,尤其是去距离稍微远一些的地方,通常都会感到力不从心。
本论文提出了一种物联网技术下盲人导航系统的路径规划算法。
采用Dijkstra最短路径算法作为基础算法,为盲人的出行提供一条最合理的路径。
其研究意义在于:一方面,通过多因素模糊算法来确定道路网络中的权值,对道路的因素等级进行人为的设定,另一方面,根据道路网络的空间分布特性,合理利用矩形限制搜索算法来限制搜索区域,减少计算工作量,系统以关系数据库作为存储模式,减小数据库的存储空间,再结合算法在盲人导航系统中的实际应用,给出了算法的应用实例。
总而言之,求合理路径集的方法就是尽量缩小搜索范围,配合合理的数据库进行快速搜索,从而得到合理路径集。
最后,利用仿真实验和实例分析验证了算法的正确性。
关键词:物联网最短路径算法关系数据库多因素模糊算法限制搜索区域Route Planning in Handheld Blind Navigation SystemBased on RFIDABSTRACTWith the increasing of the number of urban population, he blind of this special group has the focus of society. Blind travel has been a major problem to the blind especially to some place far distance slightly, usually feel inadequate.A route planning algorithm for blind navigation system with internet of things technolog is proposed.Shortest-path algorithm using as a basis for the traveling of the blind providing the most reasonable path. The research significance lies in: on the one hand, determine the weights on road network through multi-factor fuzzy algorithm, the road ways to human factors level set. On the other hand, according to the spatial distribution characteristics of road network, reasonable utilization of rectangular limited search algorithm to limit the search area which can reduce computing workload.algorithm,relational database as the storage mode can reduce the storage space database, combining with its practical applications in blind navigation system.An actual example is given.Generally speaking,the best way for reasonable path set method is to try to reduce search range which is with reasonable database are quick search and obtains reasonable path sets. Finally, using the simulation experiment and example analysis verify the correctness of the algorithm. Key word:The Internet of things Shortest-path algorithm Relational database Multi-factor fuzzy algorithm Restricted searching area目录摘要 (I)ABSTRACT (II)1 绪论 (1)1.1 盲人出行问题的提出 (1)1.2 国内外发展现状 (1)1.2.1 国外发展现状 (1)1.2.2 国内发展现状 (2)1.3 本人主要研究工作 (2)2 系统方案 (3)2.1 主要功能 (3)3 数据库实现原理 (5)3.1 sqlite数据库介绍 (5)3.2 sqlite数据库的移植 (5)3.3 数据库实现原理 (6)3.4 数据库的实际应用 (8)4 算法设计 (10)4.1 Dijkstra算法设计 (10)4.1.1 Dijkstra算法介绍 (10)4.1.2 Dijkstra算法描述 (10)4.1.3 Dijkstra算法在盲人导航中的实际应用 (11)4.2 多因素模糊算法 (16)4.2.1 多因素模糊算法的提出 (16)4.2.2 多因素模糊算法的数学模型 (16)4.2.3 多因素模糊算法的实际应用 (17)4.3 限制搜索区域的Dijkstra算法 (18)4.3.1 限制搜索区域 (18)4.3.2 椭圆算法的利用 (18)4.3.3 矩形算法的利用 (19)5 仿真及实验结果分析 (23)6 总结 (25)参考文献 (26)附录 (27)谢辞 (29)1 绪论1.1盲人出行问题的提出世界卫生组织估计全世界有盲人4000万到4500万,低视力是盲人的3倍,约1.4亿人,其中,中国是世界盲人最多的国家,目前约有800万盲人,占全世界盲人总数的18%,低视力者两千多万。
基于RFID的室内定位导航技术研究
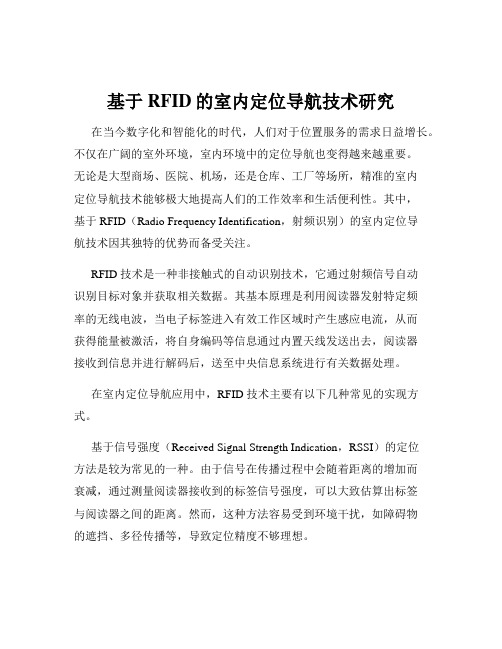
基于RFID的室内定位导航技术研究在当今数字化和智能化的时代,人们对于位置服务的需求日益增长。
不仅在广阔的室外环境,室内环境中的定位导航也变得越来越重要。
无论是大型商场、医院、机场,还是仓库、工厂等场所,精准的室内定位导航技术能够极大地提高人们的工作效率和生活便利性。
其中,基于 RFID(Radio Frequency Identification,射频识别)的室内定位导航技术因其独特的优势而备受关注。
RFID 技术是一种非接触式的自动识别技术,它通过射频信号自动识别目标对象并获取相关数据。
其基本原理是利用阅读器发射特定频率的无线电波,当电子标签进入有效工作区域时产生感应电流,从而获得能量被激活,将自身编码等信息通过内置天线发送出去,阅读器接收到信息并进行解码后,送至中央信息系统进行有关数据处理。
在室内定位导航应用中,RFID 技术主要有以下几种常见的实现方式。
基于信号强度(Received Signal Strength Indication,RSSI)的定位方法是较为常见的一种。
由于信号在传播过程中会随着距离的增加而衰减,通过测量阅读器接收到的标签信号强度,可以大致估算出标签与阅读器之间的距离。
然而,这种方法容易受到环境干扰,如障碍物的遮挡、多径传播等,导致定位精度不够理想。
基于到达时间(Time of Arrival,TOA)的定位方法则是通过测量信号从标签到阅读器的传播时间来计算距离。
但该方法对时间测量的精度要求极高,在实际应用中实现难度较大。
到达时间差(Time Difference of Arrival,TDOA)定位方法是通过测量信号到达不同阅读器的时间差来确定标签的位置。
这种方法在一定程度上降低了对时间测量精度的要求,但仍需要精确的时间同步机制。
为了提高定位精度,常常会采用多种方法相结合的方式,或者引入其他辅助技术。
例如,结合惯性传感器(如加速度计、陀螺仪等)可以在短时间内提供相对准确的位置信息,弥补 RFID 定位的不足。
RFID技术在机器人室内定位中的应用

1引 言
现如 今,越来越 多的机器人被应用 到人们 的生 活生产 中 去,诸如清 洁机器人 、安 防机器人等 。绝 大多数机器人 都工 作在室 内,在 他们执行任 务时,往往会 由操作员给 定一个路 径 ,机器人 会按照该路径 来行驶到指 定位置 。但行驶 过程 中 各种不可测 的因素都 会影响实 际的路 线。故如何保证 机器人 能够 按照给定路径行驶的 问题就被提 出了。
2 0 1 2年 ,中国电子 白板市场发展取得里程 碑式增长 。根 据 中 国市场调研 中心 2 0 1 3年 1月发布 的 { 2 0 1 2年度 电子 白
1 0 3 9 6 9 / j .i s s n . 1 6 7 1 — 4 8 9 X . 2 0 1 3 . 2 4 . 0 3 7
R F I D技术在机器人室内定位中的应用
◆李辰迪 王艳 新
-_ 一 ~ 。… 一
摘 要 介 绍一种 辅 助 家用机 器人在 室 内确 定所 处位 置 的 方案 。 方案 构 思是在 地 面上铺 设 电子标 签 坐标 网络 ,通过 安装 在机 器人 身上 的 RF I D( 无 线射 频 ) ̄ 3 5 , 1 装 置 感应 标 签信 息 ,进 而得 到对
由 于 工 作 在 室 内 , 常 用 的户 外 G P S定 位 系 统 无 法 工 作 。 继 而 , 需要 设 计 一 种 能够 帮 助 机 器 人 进 行 室 内定 位 的 系 统 。
爨慷
r
埘
L
置 点
图 1 电子 标签 网络 示 意 图
本 文介绍 的一种 室内定位方案采用 R F I D( 射频 识别 )技术 , 通 过组建物 理坐标 网络为 机器人提供 可靠 的地理位置 信息 。 该 方案 成本 低,实施 容易,可靠性 高,具有较大 的实用价值 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
随着 机器 人技 术 的飞速 发展 , 研发 导 盲机器 人
成为辅助盲人正 常生活的最好选 择之一l 1 J . 对 于
自主移动 机器 人来 说 , 能够规 划 出 自己 的运动路 径 并能 够执 行该 运 动路 径 是 机 器 人 自主行 为 的一 个 重要 体现 . 导 盲机器 人 主要 的服 务对 象是 盲人 或视 力受 损伤 的人 , 因此路 径规 划这 个功 能对 导盲 机器 人来 说尤 其 重要 J . 目前 , 导 盲设 备 大致分 为 以下 3类 : ① 手 杖 类 行 进辅 具 ; ② 穿 戴 式行 进 辅 具 ; ③ 移 动 式 行 进 辅 具 J . 这 些导 盲设 备 中大 部 分 以 避 障 为 主要 实 现 目的 , 不具 有路 径 规 划 功 能. 少数 具 备 路 径 规 划 功 能 的导盲设 备往 往需 要 大量 的资 金投 入 . 文 中以 自
Vo 1 . 2 7 No .1 F e b. 2 01 3
d o i : 1 0 . 3 9 6 9 / j . i s s n . 1 6 7 3— 4 8 0 7 . 2 0 1 3 . 0 1 . 0 1 4
基于 R F I D 技 术 导 盲 机 器 人 室 内路 径 规 划 的 研 究
索算法相结合 , 在提高搜索效率 的同时保证 了规 划路 径的可行性. 通过在平面障碍物环境下实验 , 验证 了该算法 的可行 性.
关键 词 : 路径规划 ;导盲机器人 ; 射频 识别
中图分类号 : T P 2 4 2 . 3 文 献标 志 码 : A 文章编号 : 1 6 7 3— 4 8 0 7 ( 2 0 1 3 ) 0 l 一 0 0 6 0— 0 4
1 导 盲 机 器 人 结 构
机 器人 主体 主要 由 4层 亚 克 力 板 搭 建 而 成 , 直径为 0 . 5 m, 其 上 主 要安 置 了步 进 电机 、 避 障传 感 器模 块 、 射频 模 块 、 语音识别模 块 、 P L C控 制 模 块 及 操纵 手 杆 等 部 件 . 机 器 人 车 体 配 置 方 式 采 用 经 典 的 三轮 差 动 结 构 , 包 含 两 个 驱 动 轮 和 一 个 万
Abs t r a c t:I n t h i s p a p e r,we pr e s e n t s a ne w i n d o o r p a t h p l a n ni ng a l g o r i t h m f o r s e e i n g e y e s r o b o t u s i n g t h e RFI D s y s t e m.Th e a l g o r i t h m c o mb i n e s t h e i d e a o f t r i a n g l e p o s i t i o n i n g wi t h A a l g o r i t h m ,wh i c h n o t o n l y i mp r o v e s t he e ic f i e n c y o f s e a r c h i n g b u t a l s o g u a r a n t e e s t h e f e a s i b i l i t y o f t h e pa t h a t t he s a me t i me .T he s i mul a t i o n o u t c o me s a n d f i e l d t e s t s v e r i f y t h e e fe c t i v e n e s s a n d f e a s i bi l i t y o f t he me t h o d. Ke y wo r d s:p a t h p l a n n i n g;s e e i ng e y e s r o b o t ;RFI D
陈 超 , 唐 坚 , 靳 祖 光
( 江苏科技 大学 机械工程学院 ,江苏 镇江 , 2 1 2 0 0 3 )
摘
要 :为了辅 助视力障碍者在室 内行走及寻物 , 以自主设计 的导盲 机器人为 实际应用 背景 , 提 出一种适 用于 室内导航 的
算法. 该路 规划算法利用射频识别 ( r a d i o ̄ e q u e n c y i d e n t i i f c a t i o n , R F I D) 系统 , 将 基于 R F I D系统 的三 角定位 思想与 A 搜
( S c h o o l o f Me c h a n i c a l E n g i n e e r i n g , J i a n g s u U n i v e r s i t y o f S c i e n c e a n d T e c h n o l o g y , Z h e n j i a n g J i a n g s u 2 1 2 0 0 3 ,C h i n a )
I nd o or pa t h pl a nn i ng f o r s e e i ng e y e s r o bo t b a s e d o n RFI D
C h e n C h a o,T a n g J i a n,J i n Z u g u a n g
第2 7卷第 1期
2 0 1 3年 2月
江苏科 技 大学 学报 ( 自然科 学版 )
J o u r n a l o f J i a n g s u U n i v e r s i t y o f S c i e n c e a n d T e c h n o l o g y ( N a t u r a l S c i e n c e E d i t i o n )