电动汽车非线性悬架系统混沌特性
电动汽车非线性悬架系统混沌特性

庞 加莱截 面 , 并 计算 系统 的李 雅 普诺 夫 指 数 , 发 现 整
车系 统混 沌 运 动 的存 在 , 但该 模 型 的非 线性 描 述 只
分 岔 图 、庞 加 莱 ( P o i n c a r 6 )截 面 和 最 大 李 雅 普 诺 夫 针 对传统 汽 车 , 且 未考 虑横 向稳 定杆 等 对 悬架 影 响 . ( L y a p u n o v ) 指数. 分析 结果表 明该 系统 存在 混沌运 动 , 并 发
a n d he t l a r g e s t Ly a p u n o v e x p o n e n t we r e s t u d i e d .Th e r e s u l t s
i n d i c a t e t h a t t h e c h a o s e x i s t s i n t h e s y s t e m . Th e e v o l u t i o n t h r o u g h p e r i o d i c ,q u a s i — p e r i o d i c i n t o t h e c h a o t i c mo t i o n s a r e
第 4 3卷 第 3期 2 0 1 5 年 3月
同 济 大 学 学 报( 自 然 科 学 版)
J O U R N A L O F T O N G J I U NI V E R S I T Y ( N A 矾 琅A 1 , S c l E N C E )
Vo 1 . 4 3 No . 3
目前 对 电动汽 车非线 性动 力 学研 究 主要 集 中在 转 向
C h a o s i n No n l i n e a r S u s p e n s i o n S y s t e m o f
汽车悬架系统混沌运动控制的几种方法
反馈控制 、 周期 轨道镇定 控制 、 追踪 控制 、 G O Y控制 等五种 方法分别 对该 混沌状 态进 行控 制 , 控制后 从 得到的时间历程 图 、 面图和 P i a 相平 o cr n e截面图可以得出这五种方法的控 制有效性 , 比较 五种方法各 并
自 的特 点 . 关 键 词 : 车悬 架 ; 沌 ; 法 ; 效 性 汽 混 方 有 中 图分 类 号 :H13 1 T 2 . 文献标识码 : A
系统 产生 不规则 的振 荡 , 致 系统运 动 完全偏 离 目标 , 导 一些 混沌甚 至 会给 系统 带来灾 难性 的后果 . 因此 , 人 们 渐渐认 识到 混沌控 制 的重 要性 . 本 文 用几种 方法对 单 频激励 下 汽车 悬架 系统 中的混沌运 动进 行控 制 , 并对 控制 效果进 行 比较.
汽车悬 架直 接影 响汽 车 的平顺 性 与舒适 性 , 随着 汽车 向轻量 化 和高速 化 的发展 , 对悬 架 的要求越 来 越 高 ]而 混沌是 指确 定性 系统 中 出现 的类似 随机 的过 程.0年代 末 开始 , 们对 混 沌 的研究 主 要停 留 , 8 人
在 数 学和 物理学 上 . 了今 天 , 们 逐渐 认识 到 混沌运 动对 一 些 系统 带 来 的危 害 , 混沌 运 动 会使 机 电 到 人 如
( e t o c a ia E g e r g h n a gI s t eo h m cl e h oo y S e y n 1 1 2 C ia D p. f Me h ncl ni ei ,S e y n tu f e ia T c n lg , h n a g 1 0 4 , hn ) n n n it C
第2 9卷
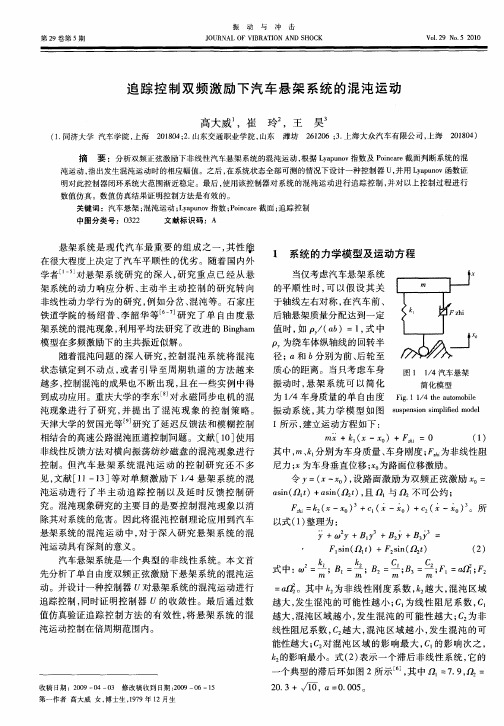
式 中 ,n ,为车 体质 量 ; 为线 性 刚度 系数 ; 为非 线 性 刚度 系数 ; 为 线性 C 阻尼 系数 ; c 为非 线性 阻 尼 系数 ;。为路面 位移激 励 ; 车体垂 直 位移. 令 Y= ( — ) 并设 路 面位移 激励为单 频正 弦 激励 。:ai( t. 。 , sns ) 2 式 中 , 为路面 位移 激励 频率 ;为时 间步长. 式 ( ) 达 为 £ 则 1表
详解非线性动力学的混沌和复杂性
详解非线性动力学的混沌和复杂性非线性动力学是一门研究非线性系统行为的学科,在这门学科中,混沌和复杂性是两个习惯性使用的术语。
混沌指的是非线性系统的表现极其高度不稳定和难以预测,而复杂性则指的是系统中的各个部分之间相互影响并产生的多种自组织现象。
这篇文章将更加详细地解释混沌和复杂性的概念以及它们在非线性动力学中的应用。
一、混沌的概念在非线性动力学研究中,混沌通常用于描述非线性系统的性质。
混沌行为的表现形式很多,其中最常见的现象是所谓的“无限迭代”。
在数学上,无限迭代意味着函数值的变化是在一个短时间内不断变化,并且难以预测。
某些非线性系统的动力学方程式就是无限迭代的。
一个经典的例子是“洛伦兹吸引子”(Lorenz attractor)。
该吸引子是由爱德华·洛伦兹在20世纪60年代概括出来的,他以一种简单的三维微分方程作为基础。
虽然该方程式在形式上非常简单,但它却表现出了高度不稳定、难以预测的行为表现形式。
也就是说,任何初始状态的微小变化都会导致最终结果完全不同的结论,因此在实际应用中非常难以精确预测。
二、复杂性的概念除了混沌之外,非线性动力学还以其复杂性而著名。
复杂性的概念可以追溯到20世纪40年代,但其实质在于多个元素之间的相互作用和组织。
例如,一个降雨系统可能会受到多个独立的天气系统的影响,它需要在这些不同的系统中寻找一条路径,以便让雨水流向正确的方向。
这个过程需要同时考虑外部环境、降雨规律、地形和土地使用等多方面因素。
在非线性动力学中,一个复杂系统的行为不仅受到其各个组成部分的属性所决定,还受到它们之间的相互作用和反馈机制所影响。
更进一步,这种相互作用可以导致系统一些非常有趣的自组织现象出现。
例如,人工神经网络可以通过逐层逼近降低误差来学习和识别各种类型的信息,而无需显式编程或指令。
三、非线性动力学和实际应用混沌和复杂性的理论虽然很有趣,但是它们在实际的应用中也具有非常广泛的应用价值。
非线性动力系统的混沌现象与控制分析
非线性动力系统的混沌现象与控制分析引言:随着科学技术的发展,非线性动力系统引起了广泛的研究兴趣。
非线性动力系统的混沌现象是其中最具有挑战性和复杂性的现象之一。
在过去几十年中,许多学者对非线性动力系统的混沌行为进行了深入的研究,揭示了其丰富的现象和潜在的应用价值。
本文将介绍非线性动力系统的混沌现象及其控制分析,以促进对这一重要现象的理解和应用。
第一部分:非线性动力系统的混沌现象1. 定义与背景非线性动力系统是指其演化方程中含有非线性项的系统。
动力系统的混沌现象是指系统随时间演化出现不确定、无序、敏感依赖于初始条件的特性。
混沌现象最早被洛伦兹(Edward N. Lorenz)于1960年发现,从此引起了学界的广泛关注。
2. 混沌现象的基本特征混沌现象具有以下基本特征:a) 轨迹的无限敏感性;b) 周期性态的分支与周期倍增;c) 随机性;d) 指数增长的轨迹分离率;e) 态空间的奇异性质等。
这些特征使得混沌现象在预测和控制上具有很大的挑战性。
3. 混沌现象的产生机制混沌现象的产生可以归结为动态系统的非线性性质和敏感依赖于初始条件。
通过非线性演化方程的迭代和初始条件的微小变化,系统的行为会出现剧烈的变化,从而呈现出混沌的特征。
第二部分:非线性动力系统的混沌控制分析1. 混沌控制方法的分类目前,针对非线性动力系统的混沌控制方法主要分为两大类:a) 传统的控制方法,如反馈控制、最优控制等;b) 近年来发展的新兴控制方法,如基于混沌同步、混沌反控和混沌控制等。
2. 混沌控制方法的基本原理传统的控制方法主要依赖于线性系统的控制理论,适用于线性动力系统或接近线性的非线性动力系统。
而基于混沌同步的控制方法则是通过构造适当的驱动系统与被控系统之间的耦合关系,使得两者的状态变量在时域上实现同步。
混沌反控方法则是利用混沌动力学的特性从系统中提取控制信号,实现系统的控制。
混沌控制方法则是在混沌系统的基础上构造一种外部控制信号,通过调节该信号的参数来控制系统的行为。
追踪控制双频激励下汽车悬架系统的混沌运动
除其 对系统 的危 害。 因此 将混 沌 控 制理论 应 用 到汽 车 悬架 系统 的混 沌 运 动 中 , 于 深入 研 究 悬 架 系 统 的 混 对
沌运 动具有深 刻 的意义 。
以式 ( ) 1 整理 为 :
振
第 2 第 5期 9卷
动
与
冲
击
J OURNAL OF VI BRAT ON AND S I HOCK
追踪 控 制双频 激励 下汽 车悬 架 系统 的混沌 运 动
高大威 ,崔
(. 1 同济大学 汽车学院 , 上海
玲 ,王
潍坊
昊。
2 10 3 上海大众汽车有 限公 司, 6 2 6;. 上海 2 10 ) 08 4
越大 , 区域越小 , 混沌 发生混沌的可能性越大 ; : C 为非 线性 阻尼 系数 , 大 , 沌 区 域 越 小 , 生混 沌 的可 C越 混 发 能性 越大 ; : 混 沌 区 域 的影 响 最 大 , C对 C 的影 响 次 之 ,
质 心 的距离 。当只考 虑 车 身
振 动 时 , 架 系 统 可 以简 化 悬
图 1 14汽 车悬 架 / 简 化 模 型
Fi . / he a tmo l g 1 1 4 t uo bi e
随着混沌 问题 的深 入 研 究 , 制 混 沌 系 统将 混 沌 控
状 态镇定 到不 动 点 , 者 引 导 至周 期 轨 道 的方 法 越 来 或 越多 , 制混沌 的成果 也不 断 出现 , 在一 些实 例 中得 控 且 到成功应 用 。重 庆大学 的李 东 对 永磁 同步 电机 的混
Y +& Y + B 1, + B2,+ B3, = , , ,
四自由度汽车迟滞非线性系统的混沌

∑a
i =1
x
2i- 1
+
∑a
i =0
2i
) = x sgn ( x � ( 1)
2i
) FK ( x ) + FC ( x, x �
把恢复力分为两部分 , 由 ( 1 ) 式第一部分可得到弹 性恢复力的数学模型为 :
2008 2 09 2 1 6收到第 1 稿 , 2008 2 09 228 收到修改稿. 3 汇众重型汽车基金资助项目
¨
z 簧载质量绕其质心的角位移 ( rad) 3 —
2. 2 路面正弦激励 由路面产生的激励采用正弦激励 . 因此 , 路面 粗糙度可近似的由以下方程来描述 :
q1 = Asin ( 2 πft) (6)
Z1 ) + k21 ( Z0 + bZ3 - Z2 ) + k23 ( Z0 + bZ3 3 n Z2 ) + C2 ( Z0 + bZ3 - Z2 ) 2 sgn ( Z0 +
第 6卷第 4期 2008 年 12 月 1672 2 6553/2008 /06⑷ /377 2 4
动力学与控制学报
JOURNAL OF DYNAM I CS AND CONTROL
Vol . 6 No. 4 Dec . 2008
四自由度汽车迟 滞非线性系统的混沌
肖海斌 方明霞
(同济大学航空航天与力学学院 ,上海 200092 )
bZ3 - Z2 ) = 0
J Z3 - k11 a ( Z0 - aZ3 - Z1 ) - k13 a ( Z0 - aZ3 ¨
其中 A和 f分别是路面正弦扰动的振幅和频率 . 后轮的激励可表示为如下 :
q2 = Asin ( 2 πft +α) (7)
车辆悬挂系统的非线性特性分析与控制
车辆悬挂系统的非线性特性分析与控制车辆悬挂系统是车辆运动学和动力学性能的重要组成部分。
传统的线性控制方法针对车辆悬挂系统往往难以满足实际的控制需求,因为悬挂系统具有显著的非线性特性。
因此,本文将对车辆悬挂系统的非线性特性进行分析,并提出相应的控制方法。
一、非线性特性的表现形式车辆悬挂系统的非线性特性主要表现在以下几个方面:1. 阻尼特性的非线性:车辆悬挂系统的阻尼特性随着行程变化呈非线性变化。
在小行程范围内,阻尼力随位移的增加呈线性变化;但在大位移范围内,阻尼力的增加速度减缓,呈非线性变化。
2. 弹簧刚度的非线性:车辆悬挂系统的弹簧刚度也随行程的变化而变化。
在小行程范围内,弹簧刚度随位移的增加基本保持不变;但在大行程范围内,弹簧刚度随位移的增加逐渐减小,呈非线性变化。
3. 悬挂系统的干摩擦力:车辆悬挂系统中存在着干摩擦力,其大小与悬挂行程的方向变化有关。
干摩擦力会导致悬挂系统的非对称性和非线性特性,进而影响车辆的稳定性和悬挂系统的控制效果。
二、非线性特性的影响车辆悬挂系统的非线性特性对车辆的运动稳定性和乘坐舒适性都具有重要影响。
1. 运动稳定性:非线性特性可能引起悬挂系统在行驶过程中出现跳动、抖动等现象,进而影响车辆的稳定性和行驶安全性。
2. 乘坐舒适性:非线性特性使得悬挂系统难以在不同行程范围内提供恰当的减震效果,从而影响乘坐的舒适性和悬挂系统的振动控制效果。
三、非线性特性的控制方法针对车辆悬挂系统的非线性特性,可以采用以下几种控制方法:1. 非线性控制器设计:基于非线性特性的具体表现形式,设计适应于车辆悬挂系统的非线性控制器。
可以采用神经网络、滑模控制等方法来提高悬挂系统的控制性能。
2. 自适应控制:通过在线辨识悬挂系统的非线性特性参数,并实时调整控制策略,使得控制器具有较强的适应性和鲁棒性。
3. 模糊控制:利用模糊逻辑来处理悬挂系统中存在的不确定性,设计模糊控制器来实现对非线性特性的控制。
非线性动力学中的混沌现象及其应用
非线性动力学中的混沌现象及其应用混沌,是指在某种程度上具有确定性的系统,但其长期演化的结果却十分难以预测,极度敏感于初值条件的不规则、随机行为。
在非线性动力学中,混沌现象一直是研究的热点,它的性质和应用也备受关注。
本文将从混沌现象的定义、特性与图像展示、混沌对噪声抑制和混沌通信三个方面来介绍混沌。
一、混沌的定义与特性混沌现象源自于流体力学中的"洛伦兹方程",经过40多年的发展,已经家喻户晓了。
混沌是一种无序的动力学行为,表现为明显的随机性,但又有可能呈现各种规则的形式。
混沌的行为具有以下特点:1. 非周期性混沌的行为不像周期性运动那样具有周期性。
混沌的状态不断发生变化,几乎无法重复,且不再出现规律性的模式。
2. 灵敏依赖初值混沌动力学系统对初始条件有极高的敏感性,即使两个系统在初值上仅有微小的偏差,也会随时间的流逝而出现大的不同。
3. 塞逊定理塞逊定理指的是混沌系统概率密度变化的特性,即系统中相邻的状态点的距离,在不断演化过程中往往成倍增长,混沌的标记是大规模的分岔。
二、图像展示混沌现象不仅以数学方程表示,还以图像、音乐甚至语言等多维度方式进行表现。
下面就是一组展示混沌的图像:通过这些图像,我们可以更直观的了解混沌现象的特征和行为。
三、混沌对噪声抑制的应用随着科学技术的发展,我们生活中出现了很多噪声,它们都会给人们的生活带来很多不便。
因此,在工程技术中,如何对这些噪声进行抑制是一个很重要的问题。
混沌抑制理论可以在一定程度上克服线性系统抑制效果不佳的问题,达到噪声抑制的目的。
混沌抑制的主要思路是控制非线性系统的混沌状态,通过改变混沌吸引子来获得不同的响应。
混沌抑制通过非线性反馈也能控制力学结构或电气电路的状态。
四、混沌通信的应用混沌通信是一种通过混沌技术实现信息传递的通信方式。
相比于传统通信方式,它的优势在于具有隐蔽性、抗干扰性、高速和多用户性等特点,尤其在无线通信、宽带通信以及高阶调制等领域得到了广泛的应用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
△z。2=z。一6f sin目一口sin够一zw2
式中:志蛎,和志击。均为座椅弹簧力拟合系数;c曲为座椅
阻尼系数;△zs为座椅等效弹簧变形量;△芝。为相对 速度.
△z5一荪+口1 sin目一61 sin 9一z5
△之5一芝。+口l臼cos口一6l函cos 9一乏5 式中:驾驶员质量位置点与车身质心在纵向的距离 为6。,在横向的距离为n。.座椅等效非线性力为弹簧
discovered.Suspension deflections of the special point in tlle bifurcation diagram were studied. It is found tllat it could
reflect t11e dynamic behaVior of system using the changes of suspension deflections. Key words:vehicle;chaos;bifurcation;Poinca托Section
are
(Poinca琵)截面,并计算最大李雅普诺夫 (Lyapunov)指数.发现系统随着路面激励频率的变
化,其运动状态在周期、拟周期和混沌运动之间经历 多次变迁,且发现系统经历周期、拟周期运动,进入 混沌运动的演化过程.根据分岔图特殊点附近悬架 动挠度的计算,发现利用悬架动挠度的变化,能反映 系统的动态行为发生了变迁.由于混沌运动增加了 系统的不确定性,所以应减少或者避免混沌运动的 发生‘s|.
力和阻尼力的和.
1.3电动汽车整车数学模型
根据牛顿运动定律,建立动力学方程,以下公式 为整车动力学方程:
m。乏。一一F。1一F。l—F。rFL—Fs2一Fc2一F。rFR—
△zs3一z。+良sin臼+6 sin∞一zw3 △zs4一z。一6,sin口+6 sin妒一2w4
△芝。1一芝。+6f口cos口一面c08
绕组电流也仅有基波分量,此时,电机转矩恒定,不
in the motor
存在转矩波动.但实际电机中,由于转子机械加工引 起的机械不平衡与装配等方面的误差,引起气隙磁
场非正弦分布,导致电机转矩波动的存在.电动汽车 的永磁同步电机振动主要由电机的电磁力引起,把 电机电磁力分为径向分量和切向分量.径向电磁力 是电磁振动的主要来源,而切向电磁力的合力产生 电磁转矩.本文主要考虑径向电磁力对系统动力学 的影响.
(2) (3)
型考虑了车身的垂向振动、俯仰、侧倾3个自由度,4 个车轮垂向的4个自由度和驾驶员垂向的1个自由 度,共8个自由度的整车模型.图中,口为车身侧倾 角;舻为车身俯仰角;F扎,F。rn,FsRl,,F。RR为悬架等
式中:Fo为幅值;夕为极对数;臼。为机械角位移;鼠
为初相角;∞为基波角速度;£为时间. 把式(2)代入式(1),得到基波磁场产生的径向 电磁力为 p,一以2(口1,f)・F5[1+cos(2印l一2“一 2乳)-J/4岸。一po+户l
Simplified model of eight degrees of fhedom of
eIectric vehicle
父 卜 |1
j。≮
,夕飞
决
1.1
电动汽车电机激励的影响 电机学中,理想化的电机气隙磁场为正弦径向电磁力分布
I湖ial
elect㈣gnetic
force distribution
庞加莱截面,并计算系统的李雅普诺夫指数,发现整 车系统混沌运动的存在,但该模型的非线性描述只
针对传统汽车,且未考虑横向稳定杆等对悬架影响.
Zhu
Qin等[2]建立了七自由度非线性整车模型,同样
在考虑左右轮相位差和前后轮胎时间延迟的正弦路
面激励下,通过分析系统参数分岔图和计算李雅普 诺夫指数,证明该系统存在混沌运动,但该文并未涉
第43卷第3期
2015年3月
同济大学学报(自然科学版)
JOImNAI.OF TONqI
V01.43 No.3
I】NIvERSITY(NAnmAI.ScI刚CE)
Mar.2015
文章编号:0253—374X(2015)03一0442一06
D()I:10.11908/j.issn.0253—374x.2015.03.019
F。5一fs5△之5
(8) (9)
f“,△泣≥0
氏i—k,厶证<o
式中:i一1,2,3,4;f。i为等效阻尼系数;忌。i为等效非 线性弹簧力拟合系数;以为指数;f。:为悬架等效阻尼 压缩行程系数;c鲥,为悬架等效阻尼拉伸行程系数; △。为悬架上下支点等效相对速度;△%为悬架等效 弹簧变形量;△乏。,为相对速度.
J 0
利用麦克斯韦方程,可求得电机气隙中单位面
积的径向电磁力[6]为
1 1
2以一2岛)/4肚o]d臼1
1.2电动汽车整车非线性因素
(5)
本文考虑电动汽车整车非线性因素包括悬架、
(1)
.厂r一≠一(B;一B;)≈≠一B;
厶芦。 厶Po
轮胎和座椅等处的非线性,同时考虑前后横向稳定 杆和电机振动对悬架的影响.
切向气隙磁密;m为空气磁导率.因为B。一般比B。
大得多,所以计算径向电磁力时可忽略B。的影响. 电机径向电磁力主要是由定、转子绕组中的基 波磁场产生的,所以本文主要考虑基波磁场产生的 电磁力.设气隙磁导为A(臼,,f),基波合成磁势为 .厂o(日1,£),则气隙磁密[7]为
B,一^(臼l,£)・A(口l,£) 厂0(臼1,£)一F0cos(加1一以一岛)
岔图选取4组参数,分析4组参数的庞加莱
Chim)
Abstract:Ehsed
on
tlle descriDtion of rlonlinear factors,t11e
was
ei曲t
degrees of freedom of Ev road excitation, the
built.Under
to
me
s溉
usoidal
resD0nses
tlle
moilel、vas
obtained,t}len,the bifurcation diagram,tlle Pbinca托section and the largest Lyapunov exponent were studied.The results indicate mat the chaos exists in tlle svstem.The evolution ttlrough periodic,quasi—periodic into tlle chaotic motions
式中:26f为前轮距;26。为后轮距;口为整车质心至前
轴距离;6为整车质心至后轴距离. 横向稳定杆对悬架摇臂的垂直作用力为
J,参一[(F。1+Fcl+F。rFL+Fs2+Fc2+F。r豫)z,一
(F!;3+Fc3+F。rm,+Fs4+Fc4+F。脓)Z2一 (Fs5+Fc5)61]cos∞
式中:稚凡,孙R,魂RL,魂RR分别为作用在各车轮处路
面激励的垂向位移;惫wFL,愚wFR,愚。RL,愚。RR分别为车轮 等效刚度系数. 1.2.3座椅非线性特性 电动汽车座椅的非线性特性用多项式描述,其
F。:一是。:sgn(△z。i)I△z。i l”
Fci—f。i△乏。i
(6) (7)
等效非线性弹簧力和阻尼力分别为 Fs5一是s5l△z5+愚S52△z;
Wu等‘11建立了包括驾驶员模型在内的整车八 自由度模型,在考虑相位差和时间延迟的正弦路面
激励下,对具有随机参数确定性系统的非线性整车 1
电动汽车整车非线性描述
与传统汽车一样,在电动汽车中,衬套、弹簧、悬
模型进行数值分析,得到系统的分岔图、时间历程、
收稿日期:2014一05一07
基金项目:教育部高等学校博士学科点专项科研基金(20120072110013);国家自然科学基金(51105277);国家“九七三’’重点基础研究发 展计划(2011CB711200) 第一作者:牛治东(1987一),男,博士生,主要研究方向为汽车随机非线性动力学以及混沌分岔等.E—mail:niu99niul22390981@163.com 通讯作者:吴光强(1965一),男,教授,博士生导师,工学博士,主要研究方向为车辆动力学与控制.E-mail:wuguangqiang@ton百i.edu.cn
个旋转的径向力波[8],其中电磁力的交变部分是电 机产生振动的主要原因.把电机定子简化为圆柱形
壳体,电机径向电磁力分布如图2所示.图中,加为
电机径向电磁力的不变部分,夕。为电机径向电磁力 的交变部分,F。为电机激励引起的系统垂向力.
/Lj r、Jf肋 2吖\纱
j强k
图1电动汽车八自由度简化模型
Fig.1
电动汽车非线性悬架系统混沌特性
牛治东,吴光强
(同济大学汽车学院,上海201804)
摘要:在分析电动汽车非线性因素的基础上,建立八自由度 非线性模型.在正弦路面激励下,得到系统动力学响应,计算 分岔图、庞加莱(Poinca畦)截面和最大李雅普诺夫 (Lyapunov)指数.分析结果表明该系统存在混沌运动,并发 现了系统通过周期、拟周期进入混沌运动的演化过程.计算 分岔图特殊点处的悬架动挠度,发现利用悬架动挠度的变 化,能较好地反映系统的动态行为发生的变迁. 关键词:汽车;混沌;分岔;庞加莱截面 中图分类号:U461.1 文献标志码:A
及特殊点附近整车动力学特性,且对象为传统汽车. 目前对电动汽车非线性动力学研究主要集中在转向 系统[3]、电动机[4]的非线性特性、分岔混沌特性及其
Chaos
in
Nonlinear
Suspension
System
of
Electric Vehicle