水果自动分选机分级卸料实时控制系统的设计
基于plc的水果分拣系统毕业设计
基于plc的水果分拣系统毕业设计《基于PLC的水果分拣系统毕业设计》1. 引言在工业自动化领域,PLC(可编程逻辑控制器)作为一种常见的控制设备,在各种自动化系统中发挥着重要作用。
本文将对基于PLC的水果分拣系统进行毕业设计,并就其设计、实施和应用进行深入探讨。
2. 概述水果分拣系统在农业生产中有着重要的应用。
通过自动化的分拣过程,可以提高生产效率、减轻劳动强度,同时保证产品质量。
基于PLC的水果分拣系统将结合传感技术、控制原理和机械执行装置,实现对水果的自动分类和分拣。
3. 设计原理在设计过程中,需要充分考虑不同种类水果的形状、颜色、大小等特征。
通过传感器检测水果属性,PLC进行逻辑判断并控制执行装置进行分拣。
采用模糊逻辑算法,可以提高系统对水果特征的识别和分类准确度。
4. 系统组成基于PLC的水果分拣系统通常包括传感器模块、PLC控制器、执行装置和人机界面。
传感器模块用于采集水果属性信息,PLC控制器用于进行逻辑判断和控制指令输出,执行装置用于实现分拣操作,人机界面用于参数设置和监控。
5. 实施过程在系统实施过程中,需要对传感器进行合理布置和调试,编写PLC程序实现对传感器信号的处理和控制逻辑的设定。
执行装置的选择和调试也是关键的一环。
6. 应用前景基于PLC的水果分拣系统可以应用于水果种植基地、水果加工厂等场景,为农业生产提供技术支持。
随着人工智能和大数据技术的发展,将有望实现对水果质量的更精准评估和预测。
7. 总结和展望通过本文对基于PLC的水果分拣系统毕业设计的探讨,可以更加全面地理解自动化系统的设计与实施过程。
未来,随着技术的不断更新和应用场景的拓展,基于PLC的水果分拣系统将迎来更广阔的发展空间。
8. 个人观点作为文章写手,我深刻理解基于PLC的水果分拣系统对农业生产的重要意义。
在未来的发展中,我期待该系统能在智能化、高效化方面取得更大突破,为农业现代化发展贡献更多力量。
通过本文的讨论,我们对基于PLC的水果分拣系统毕业设计有了更深入的了解。
瓜果类农副产品自动分拣系统的设计

分拣,简而言之,就是将产品进行分类。根据不同标准或条件,可将产品分为多种类别。分拣技术最先是在美国和欧洲发展起来的,其技术水平居世界前列。但日本由于其国家工业发展需要,数量上逐渐赶超欧美。虽是二战之后才开始引入,但直至1990年已拥有1000多台自动分拣机。在世界范围内,分拣机数量排名已经屈指可数。
当前,传统的人工手动分拣和机械自动分拣已经不能满足工农业发展的需求,智能自动分拣技术日渐成熟,应用越来越广。智能自动分拣方式可以根据人们编写的程序,按照人们的意愿工作,具备很强人机对话能力。对使用者要求不是很高,适用范围较广。
自动分拣系统主要分为检测机构、传送机构、控制机构、执行机构、储存通道几个部分:
3.2.4磁性开关选择 183.2.5Fra bibliotek磁阀的选择 18
3.2.6传感器的选择 18
3.3电气控制部分 21
3.3.1 按钮 21
3.3.2 PLC的简介和型号的选择 22
4.系统软件设计 25
4.1 控制流程图 25
4.2 程序编写与软件设计 26
4.2.1 I/O分配表 26
4.2.2 顺序功能图 27
在一些发达国家,自动分拣系统已经成为运输、快递等行业的一种基本设备。近几年,中国的电子商务蓬勃发展,物流是其发展的核心动力,决定着该行业的生死存亡。产品销量与物流速度密不可分,在一定程度上成正相关。分拣是物流的基础,分拣速度很大程度上影响到物流的速度,因此自动分拣系统的投入使用显得尤为重要。同样,农副产品物流集散中心也是如此。就目前国内状况而言,瓜果农副产品自动分拣系统还得不到完全普及。特别是部分农村边远地区,在产品的分类中,还使用传统的手工分类方式。这种方式,只适合分拣少量、分散、品质要求较低的场合。而且存在投入大、分拣效率低、品质参差不齐、分拣效果差等诸多缺点。所以,设计出先进智能的分拣系统代替手工分类的方法,显得尤为重要。
551 一种小型水果自动分级机机械部分的设计(SW建模)
我国是一个水果生产大国,水果产量高,品种繁多,种类较为齐全。这是我国水果产业的优势, 但这其中也存在一些问题。我国水果产业中有一部分是小规模型,由小户的果农种植。这些果农由 于规模小,对于水果产后的商品化处理较为简单,甚至不进行处理,直接进入市场销售,造成了一 定的经济损失。随着果农经营理念的进步,也意识到要改变生产经营方式,对水果进行分级等处理, 以实现利润的最大化。这是市场的需求,本设计的目的就是为了给市场提供一种小型水果的分级方 案,供用户选择。
(1)由于水果一般都比较娇嫩,容易擦伤或碰伤,采用传统的机械式分选分级机具难免会出 现损伤,从而造成“降级”损失。随着科技水平的不断提高,各学科互相渗透日益普遍,光学、电 子技术广泛应用到分选分级设备中。运用光、电技术,不仅效率高,检验精度也高,还可以测定果 实的成熟度、含糖量、有否病虫害、空心等,对这些项目,传统机械式是无能为力的。运用光、电 技术,还可以去掉很多繁杂的结构,机具紧凑、灵巧,可靠性高,甚至造价还低。
本文介绍了水果分级技术对与我国水果产业的作用及意义。同时针对水果分级技术,对国内外 的发展现状进行概述。在充分了解了国内外现有的技术,以国内外水果分级技术发展的现状作为技 术依据,设计了小型水果自动分级机械。本设计以小金橘为例进行设计创新。对采摘后的“小金橘” 一类的小型水果,对体积的大小进行分级处理,主要完成上料机构部分、分级结构部分的设计及计 算,包括方案的论证、传动结构、分级部分链条、链轮轴及其他主要零部件的设计及计算。
2 总体设计 ....................................................................................................................2 2.1 设计的内容.............................................................................................................2 2.2 设计的依据 ............................................................................................................3 2.3 设计的要求 ............................................................................................................3
智慧水果分拣系统设计设计方案

智慧水果分拣系统设计设计方案智慧水果分拣系统是一种利用人工智能和机器视觉技术对水果进行自动分拣的系统。
它可以在短时间内对大批量水果进行分类和分拣,提高效率和准确度。
下面将介绍一种智慧水果分拣系统的设计方案。
系统硬件部分:1. 视觉传感器:使用高分辨率的摄像头或者激光扫描仪作为视觉传感器,用于获取水果的外观特征和形状信息。
2. 输送带:将水果从输入端送至分拣区域,可以通过传送带控制水果的运动速度和方向。
3. 机械臂:选择适合的机械臂来收集和移动水果,可根据需要选择单臂或多臂机械臂,具备较大的运动范围和精确度。
4. 电脑控制系统:用于实现系统的整体控制和运行,包括图像处理和分析算法、机械臂运动控制等。
系统软件部分:1. 图像处理和分析算法:通过机器视觉技术对水果的外观特征进行提取和分析,包括颜色、形状、大小等方面的特征。
可以使用深度学习算法训练水果分类模型,实现对不同水果的自动分拣。
2. 机械臂控制算法:根据图像分析结果,确定机械臂的位置和姿态,实现对水果的准确抓取和放置。
可以使用逆运动学算法计算机械臂的控制参数,实现抓取和放置的精确控制。
3. 系统控制界面:设计一个人机交互界面,实现系统的参数设置、运行控制和状态监测等功能。
可以采用图形化界面,方便用户操作和监控系统运行。
系统工作流程:1. 输入水果:将水果放置在输送带上,输送带将水果送至分拣区域。
2. 图像采集和处理:视觉传感器获取水果的外观图像,图像处理算法对图像进行处理,提取水果的特征信息。
3. 水果分类:使用训练好的分类模型对水果进行识别和分类,确定每个水果的类别。
4. 机械臂抓取:根据分类结果,控制机械臂的位置和姿态,准确地抓取每个水果。
5. 水果分拣:将抓取的水果放置到对应的分拣箱中,完成水果的分拣。
6. 系统监控:通过系统控制界面,监测系统的运行状态和分拣结果,实时调整和优化系统的运行参数。
系统的优势:1. 高效准确:利用机器视觉和机械臂控制技术,可以在短时间内对大量水果进行自动分拣,提高生产效率和准确度。
水果自动分选机分级卸料实时控制系统的设计
W e n ua iXih ,S e h n ,L o in ,Z o n p n un W i o g iDa la g h u Xig e g
( colfA t ai ,Su es U i r t, af g20 9 ,C ia ,Sho o u m tn ot at n e i N nn 1 06 hn ; o o h v sy i 2C lg nom t nSi c n n i e n Sa d n gi l rl nvrt,Ti n2 1 1 ,C i ; ol eo fr ai c neadE gn r g, h nogA r u ua U i sy a 0 70 8 hn e fI o e ei ct ei a 3C lg I om tna l tcl n i e n C i gi trl n e i , ei 00 3 h ) o e n r ai n Ee r a E gn r g, hn A r u ua i rt B in 10 8 ,C i e f l o f o d ci ei a c l U v sy jg a n
Ab t a t s r c :A e ltme c nr ls se f rd s h r i g p o e s o utma i r i g a e sd sg e r a —i o to y tm o ic a g n r c s fa o t fu t r d r wa e in d, a d a d n mi c n y a —
211; 7 08
10 8 ) 0 0 3
要: 设计 出一套水果 自动分选机分级卸 料过程实时控 制系统 , 出一种水果等 级信息与 水果实 时位 置间 的连 续动态配 准 提
方法 , 实现输送线上水果流的动 态位 置的实 时检测 、 连续跟踪 、 水果等 级信息与其 实时位置 间的连 续动态配 准以及水果分级卸 料过程的 自动控制 。给 出控制系统的 电路结构 , 分析步进 电机 的控制过程 , 详细论述 水果等级 信息 与其实 时位置间的动态配 并 准方法。实 际运行实验表明 , 在该 系统 的控制下 , 所有水果都能在品质检测装 置为其判 定的等级 出 口处 自动平稳卸料 。 关键词 : 水果 ; 分选 ; 卸料 ;自动控制 ; 配准
毕业设计(论文)-水果分选机分选部分设计
目录引言 (3)1 水果分选机的研究现状与发展状况 (3)1.1研究现状 (3)1.2课题研究的意义与发展 (5)2 本设计的内容与要求 (5)2.1内容 (5)2.2要求与数据 (5)2.3技术参数 (6)3 功能原理设计 (6)3.1分选机的工作方式 (6)3.2分选机构原理的设计 (7)3.3隔板的设计 (7)4 方案的选择与设计 (8)4.1 分选机整体装置的设计 (8)4.2电机的选择 (8)4.3传动比及主要装置运动参数计算 (10)5 重要零件的校核与计算 (11)5.1齿轮的设计与计算 (11)5.2 V带的设计 (14)5.2.1 带传动的选择 (14)5.2.2 V带传动的计算 (17)5.3 链传动的设计 (19)5.3.1 链传动的选择 (20)5.3.2 链传动的计算 (21)5.4 输出轴部分的设计 (22)5.4.1 输出轴的设计 (22)5.4.2 平键的设计 (27)5.5 输入轴部分的设计 (28)5.5.1 输入轴的设计 (28)5.5.2 平键的设计 (33)5.6 滚子轴的设计与计算 (34)5.7 箱体的设计 (36)5.8 螺栓组的设计与计算 (38)5.9 润滑密封的设计 (42)6 三维数字化建模 (42)6.1分选机整体的三维建模 (42)6.2带传动部分的三维建模 (44)6.2分级机构的三维建模 (45)6.2入料斗的三维建模 (46)7 总结 (47)谢辞 (48)参考文献 (50)引言近年来,随着农业科技的发展和人民生活水平的提高,国内外水果品种越来越多,人们对水果的品质也有了更高的要求。
为了提高水果的加工质量和出品等级,需要对水果进行严格的质量分级和大小分级。
现有的水果分选机大多结构较为复杂,一般多以大型生产线为主,制造成本较高,分选效率也较低,分选成本较高,现有的水果分选机又以重量分选机为主,而农产品基地的水果销售多以尺寸大小、质地为衡量标准,重量分选机就不适合在农产品基地使用。
基于计算机视觉的水果分选机实时控制系统
利用单 片机对分选 台执行机构进行控制。工作时,光电传感器的脉 冲信号触发图像卡采集图像 ,计算机进行 图 像处理后 ,其结果信号由串口发出,单片机接收到结果信号后向相应的电磁阀发 出开关量信 号,驱动执行机构
动作 ,从 而 实现 实 时分 选 。
关键词 :农业工程 ;水果分选机;设计 ;实时控制系统;计算机视觉
中图分 类 号 :¥ 2 .;S 2 2 65 1 6 文 献标 识码 : A 文章 编 号 :1 0 — 1 8 (0 60 -0 0 -0 0 3 8 X2 0 )8- 1 4 .2 . - -
0 前 言
目前 .大多数 国产水果依 据水果大小和质量进 行 分 级 ,在 果 形 、色 泽 、果 面 缺 陷和 损 伤 等 方 面还 主要依靠人 工进行检测 与分 级 。这种 方式存 在着生 产率低 、 工劳动强度 大 、 选精度不稳定等缺点 。 人 分 利 用 计 算 机 视 觉 技 术 对 水 果 进 行 分 级 有 助 于 提 高 分 选 的 标 准 和精 度 ,增 加 产 品 的 附 加 值 和 改 善 劳 动
并开始采集 图像 ,采集完毕后 的图像送入计 算机进 行 图像处 理 。处 理结 果由计算机 串 口发出 ,单片机 接 收计 算 机 的 处 理 结 果 信 号 ,并 调 用 分 选 控 制 子 程 序 。程 序 执行 完 毕 后 ,向 相 应 的分 选 开 关 发 送 控 制
信 号 ,使 分 级 机 构 动 作 ,实 现 分 选 。水 果 分 选 机 系
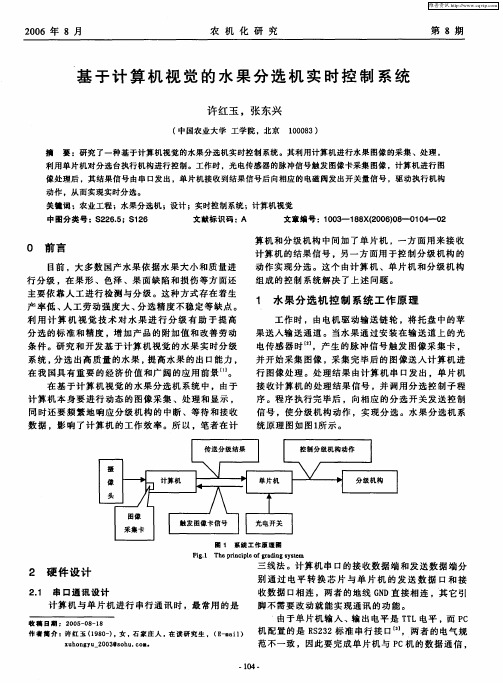
统原理图如 图1 示。 所
数据 ,影 响了计算机 的工作效率 。所以 ,笔者在计
圈 1 系绞 工作 原 理 圈
F g 1 Thep n i l f g a i g s s e i . r c p eo r d n y 1 串 口 通 讯 设 计 .
水果分选机设计

目录摘要 (1)关键词 (1)1 前言 (2)2 总体方案的拟定 (3)2.1 原理分析 (3)2.2 总体结构设计 (5)2.3 各执行机构主要参数的计算 (6)2.4 传动装置的运动和动力参数的计算 (13)3 主要零件的选择和设计 (15)3.1 皮带传动的设计计算 (15)3.2 直齿圆柱齿轮的设计计算 (17)3.3 滚子链传动的设计计算 (20)3.4 轴的设计计算 (21)3.4.1 高速轴的设计计算 (21)3.4.2 低速轴的设计计算 (24)3.5 轴承的校核 (27)3.6 键的设计计算与校核 (27)3.7 润滑与密封 (28)3.8 主要缺点和有待进一步改进的地方 (29)4 结束语 (29)参考文献 (31)致谢 (32)水果分选机的设计摘要:本文分析了中国国内外水果分级分选机的研究和发展现状,对未来进行了展望,设计出了一种新型水果分级分选机构。
该水果分级分选机是由分级滚筒、传动机构和电动机组成。
采用电动机提供动力,通过带轮传动机构,将运动和动力传送到直齿圆柱齿轮减速器,然后再通过链轮传动机构,将所需的运动和动力传送至分级滚筒上,从而实现水果的分选。
整个机构简单且易于操作,便于维护,提高了生产效率,降低了劳动强度,为实现水果加工机械化与规模化提供了前提。
关键词:水果;形状;分选机构;分级滚筒;The design of fruit sorting machineAbstract:This paper analyzes the present situation of the Chinese domestic and foreign fruit sorting machine research and development, on the future prospects, we design a new type of fruit sorting mechanism. The fruit sorting machine is composed of grading cylinder, transmission mechanism and a motor. The power provided by a motor, through a belt pulley transmission mechanism, the movement and power is transmitted to the straight tooth cylindrical gear reducer, and then through the chain wheel transmission mechanism, the required movement and power is transmitted to the classification on the drum, thereby we can realize the separation of fruit. The entire mechanism is simple and easy to operate, easy to maintain, improve production efficiency, reduce labor intensity, which help to achieve the fruit processing mechanization and scale and to provide the premise.Key Words:fruit; shape; the grading mechanism; grading cylinder1 前言1.1 选题研究意义水果分选是水果进入流通领域的一个重要环节,直接关系到水果生产的效益。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第29卷 第5期2008年5月仪器仪表学报Ch i nese Journa l o f Sc ientific Instru m entV ol 129N o 15M ay 2008收稿日期:2007-11 Recei ved Dat a :2007-11水果自动分选机分级卸料实时控制系统的设计魏新华1,孙卫红2,李道亮3,周杏鹏1(1 东南大学自动化学院 南京 210096;2 山东农业大学信息科学与工程学院 泰安 271018;3 中国农业大学信息与电气工程学院 北京 100083)摘 要:设计出一套水果自动分选机分级卸料过程实时控制系统,提出一种水果等级信息与水果实时位置间的连续动态配准方法,实现输送线上水果流的动态位置的实时检测、连续跟踪、水果等级信息与其实时位置间的连续动态配准以及水果分级卸料过程的自动控制。
给出控制系统的电路结构,分析步进电机的控制过程,并详细论述水果等级信息与其实时位置间的动态配准方法。
实际运行实验表明,在该系统的控制下,所有水果都能在品质检测装置为其判定的等级出口处自动平稳卸料。
关键词:水果;分选;卸料;自动控制;配准中图分类号:TP273+.5 文献标识码:A 国家标准学科分类代码:510.8040D esign of rea-l tim e control system for dischargi ng process of autom atic fruit graderW e iX inhua 1,Sun W e i h ong 2,L iDao liang 3,Zhou X i n gpeng1(1Schoo l of A uto m ation ,Southeast U ni ver sity,N anj i ng 210096,China;2College of Information Science and E ngineer i ng,Shandong A gricult ural U ni ver sity,T ai c an 271018,China;3Co llege of Infor m ation and E lectrical E ngineer i ng,China Agr icultural Universit y,Beij i ng 100083,China )Abst ract :A rea-l ti m e contro l syste m for discharg i n g process of auto m atic fru it grader w as desi g ned ,and a dyna m -ica ll y reg istration m ethod for fr u it g rade infor m ati o n and fr u it rea-l ti m e positi o n w as presented ,w h i c h could detect and trace conti n uously the dyna m ic position o f fr u it fl o w on the conveyer of t h e grader ,and reg ister dyna m ically t h e fru it grade i n for m ation w ith the rea-l ti m e position ,and contro l auto m atica ll y the fruit discharg i n g process .Constructi o ns and wo r k i n g princ i p les o f the control syste m are presen ted .Operati o n process of the step m otor is analyzed .And the dyna m ica l reg istration m ethod for fr u it grade i n f o r m ation and the rea-l ti m e position is d iscussed i n detai.l Practical perfor m ance sho w s tha t all fruits are dischar ged s m oothly on the prospective dischar g ing ports under contro l of the re -a-l ti m e control syste m.K ey w ords :frui;t grad i n g ;dischar g ing ;auto m atic contro;l reg istrati o n1 引 言为实现水果的自动分级卸料,水果自动分选机的分级卸料控制系统必须能够实时检测、连续跟踪输送线上水果流的动态位置,以在水果到达相应等级的分级出口时,控制分级卸料执行机构对水果实施自动卸料。
应义斌等人利用接近开关和移位寄存器设计了一套控制系统,实现了料斗式水果分级卸料机构的分级卸料过程的自动控制[1]。
PLA 等人则利用CAN 总线网络构建了一套水果自动分选机柔性控制系统[2]。
为进一步提高分级卸料控制系统的可靠性、可扩展性和同步性能,本文针对自主研发的水果机器视觉自动分选机,采用模块化结构,利用RS485总线和CAN 总线混合网络设计出一套水果自动分选机分级卸料实时控制系统。
第5期魏新华等:水果自动分选机分级卸料实时控制系统的设计10252 水果自动分选机分级卸料装置的工作原理2.1 水果自动分选机的一般工作原理水果自动分选机一般由水果输送装置、水果品质检测装置、水果分级卸料装置和同步控制系统等部件组成[1-5]。
在图1所示的自主研发的水果机器视觉自动分选机中,滚子式水果输送装置负责连续输送水果并使水果自动成单个排列[6];摄像机负责连续采集输送线上水果流的动态序列图像,由图像处理系统对图像进行处理,提取各个水果的品质参数,并综合判定其等级;当带有等级信息的水果到达所属等级的分级出口时,相应的分级执行机构动作,迫使该水果下面的水果分选杠杆转动,将水果从滚子上撬起并滚入相应的水果收集箱[7];同步控制系统则负责控制分选机的各个部件同步协调工作。
1分级执行机构; 2水果; 3摄像机; 4水果支承滚子;5水果分选杠杆; 6摩擦带; 7循环输送链; 8水果收集箱;9输送链链轮; 10槽型红外光电开关传感器; 11同步编码盘图1 水果机器视觉自动分选机的总体结构示意图F i g .1Constructi on of the fru it machine v isi on grader2.2 杠杆式水果高速分级卸料装置的工作原理图1中所采用的杠杆式水果高速分级卸料装置的具体结构如图2所示。
分选杠杆通过其中间套筒安装在纵向水平轴上,并可绕其自由转动。
在步进电机的驱动下,分选凸轮可在其/分选0和/通过0两个工作位置之间来1步进电机; 2分选杠杆套筒; 3分选杠杆分选臂; 4水果;5水果支承滚子; 6输送链; 7纵向水平轴;8分选杠杆承压臂; 9分选凸轮图2 杠杆式水果高速分级卸料装置的结构示意图F ig .2Constructi on of t he leve r -sty l ed hi gh -speedfru it discha rg i ng asse mb l y回切换。
在/分选0位置,分选凸轮的工作表面的最高点正好与分选杠杆承压臂的上表面齐平。
当分选杠杆在输送链的带动下向前运动时,其承压臂就在分选凸轮的工作表面上滑动,并在分选凸轮升程的作用下被迫绕纵向水平轴转动,分选杠杆的分选臂则逐渐将水果从支承滚子上撬起并逐渐滚离输送线;在/通过0位置,分选凸轮工作表面的最低点高于分选杠杆承压臂的上表面,分选杠杆自由通过,水果继续向下一分级出口输送。
通过对分选凸轮工作表面形状的优化设计,可保证卸料过程对水果没有冲击[7]。
3 分级卸料实时控制系统的设计分级卸料实时控制系统是分选机同步控制系统的一部分。
考虑到分选机分级出口较多、各部件之间相距较远又需要同步协调工作,而且水果等级信息等数据需要在部件之间实时传输,所以分级卸料实时控制系统采用模块化结构,基于CAN 总线和RS485总线混合网络设计而成,其结构如图3所示。
图3 分级卸料实时控制系统的总体结构F i g .3B lock d i agra m of the d i scharg ing contro l syste m系统同步定时信号发生器负责生成系统同步定时信号;分级执行控制器负责跟踪已定级水果的动态位置,完成水果等级信息与其实时位置的动态配准,并控制分级执行机构完成某一等级水果的分级卸料;水果分选机主控制器则负责从水果品质检测装置接收水果等级信息并发送到各分级执行控制器,此外还负责系统各模块的工作参数设置和状态监控。
RS485总线专用于传输同步定时信号,以确保其实时传输。
而水果等级信息、参数设置指令和各模块的状态信息等则通过CAN 总线进行通讯传输。
3.1 系统同步定时信号的产生如图1所示,在水果机器视觉自动分选机的输送链链轮轴上安装有一个同步编码盘,盘沿上沿同一圆周均匀分布着与链轮齿数相同数量的小通孔。
一个槽形红外光电开关传感器跨装在盘沿上,其红外光束正好可从小通孔中穿过。
编码盘与链轮一起同步转动。
所以输送链每前进一个链节距,即链轮每转过一个齿,红外光电开关就产生一个脉冲信号。
此脉冲信号在系统同步定时信号1026 仪 器 仪 表 学 报第29卷发生器内,先经光电隔离和脉冲整形变为标准脉冲,再经光电隔离,然后由RS485发送器发送至RS485总线上,作为整个分级卸料实时控制系统的同步定时信号。
3.2 分级执行控制器的设计所有分级执行控制器都采用AT 89S52微控制器开发而成,其电路原理如图4所示。
图4 分级执行控制器的电路原理框图F i g.4Schema ti c diagra m of the d i scharg ing contro ller分级执行机构的步进电机直接由步进电机驱动器来驱动。
分选凸轮的位置切换情况,则由安装在分选机机体框架上的两个电感式接近开关来监测。
当分选凸轮到达其/分选0或/通过0位置时,就有一个接近开关被触发并产生一个脉冲信号。
RS485接口由SP485E 实现,系统同步定时信号接至AT89S52的外部中断I NT0。
CAN 总线接口由SJ A1000T 实现,其中断信号接至AT89S52的外部中断I NT1,并使用P2.7作为其片选信号。