机械设计基础ppt第二章
合集下载
机械设计基础第二章 摩擦、磨损及润滑
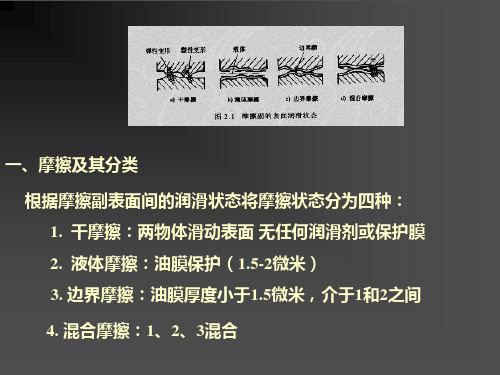
化学吸附膜 中等载荷、速度和温度
化学反应膜 重载、高速和高温 三、混合摩擦(润滑) 膜厚比
(a)
hlim /( Ra1 Ra 2 )
(b)
λ越大,油膜承载比例大,,f越小
四、流体摩擦(润滑) 膜厚比λ >5 全液体摩擦
§2—2 磨损
一、典型的磨损过程 1、跑合磨损过程 在一定载荷作用下形成 一个稳定的表面粗糙度, 且在以后过程中,此粗糙 度不会继续改变,所占时 间比率较小
2、磨粒磨损
由于摩擦表面上的硬质突出物或从外部进入摩擦表面 的硬质颗粒,对摩擦表面起到切削或刮擦作用,从而引起 表层材料脱落的现象,称为磨粒磨损。这种磨损是最常见 的一种磨损形式,应设法减轻这种磨损。 为减轻磨粒磨损,除注意满足润滑条件外,还应合理 地选择摩擦副的材料、降低表面粗糙度值以及加装防护密 封装置等。
1、润滑油 有机油、矿物油、合成油 性能指标: 1)粘度 2)油性 4)闪点和燃点 5)极压性能
3)凝点
6)氧化稳定性
2、润滑脂 钙基润滑脂、钠基润滑脂、锂基润滑脂 性能指标: 1)针入度 3、固体润滑剂 2)滴点 3)安定性
石墨、二硫化钼、氮化硼 、蜡、 聚氟乙烯、 酚醛树脂
4、润滑剂的添加 二、粘性定律与润滑油的粘度
合理地选择材料及材料的硬度(硬度高则抗疲劳磨 损能力强),选择粘度高的润滑油,加入极压添加剂或 MoS2及减小摩擦面的粗糙度值等,可以提高抗疲劳磨 损的能力。
8
2018/11/12 机械设计基础
4、腐蚀磨损
在摩擦过程中,摩擦面与周围介质发生化学或电化学反应而 产生物质损失的现象,称为腐蚀磨损。腐蚀磨损可分为氧化 磨损、特殊介质腐蚀磨损、气蚀磨损等。腐蚀也可以在没有 摩擦的条件下形成,这种情况常发生于钢铁类零件,如化工 管道、泵类零件、柴油机缸套等。
机械设计基础第二章--常用机构介绍

4—机架 1,3—连架杆→定轴转动 2—连杆→平面运动 整转副:二构件相对运动为
整周转动。
摆动副:二构件相对运动不 为整周转动。
曲柄:作整周转动的连架杆
摇杆:非整周转动的连架杆
C
2
B
3
1
A
D
4
二、平面四杆机构的常用形式
1、曲柄摇杆机构
(构件4为机架、构件2为机架)
2、双曲柄机构
}全回转副四杆机构
(二)曲柄为最短杆。 ▲铰链四杆机构存在曲柄的条件是:
(一)最短杆与最长杆长度之和小于或等于其 余两杆长度之和。
(二)机架或连架杆为最短杆。
4、曲柄滑块机构 二、平面四杆机构的内部演化:
第二节 凸轮机构
一、凸轮机构的组成与分类: 运动方式:将主动凸轮的连续转动或
移动转换成为从动件的移动或摆动。 分类:1、形状
①盘形凸轮机构——平面凸轮 机构
②移动凸轮机构——平面凸轮 机构
③圆柱凸轮机构——空间凸轮 机构
2、运动形式
按从动件的运动型式:
①尖底从动件:用于 低速;
②滚子从动件:应用 最普遍;
③平底从动件:用于 高速
O
r0
1 2 3
4
5
6 7 8
二、从动件的常用运动规律
从动件的运动规律——从动件在工作过程中, 其位移(角位移)、速度(角速度)和加 速度(角加速度)随时间(或凸轮转角) 变化的规律。
长 几何形状简单——便于加工,成本低。 3、缺点: ①只能近似实现给定的运动规律; ②设计复杂;
③只用于速度较低的场合。
由转动副联接四个构
件而形成的机构,称为铰 链四杆机构,如图所示。 图中固定不动的构件是机 架;与机架相连的构件称 为连架杆;不与机架直接 相连的构件称为连杆。连 架杆中,能作整周回转的 称为曲柄,只能作往复摆 动的称为摇杆。根据两连 架杆中曲柄(或摇杆)的数 目,铰链四杆机构可分为 曲柄摇杆机构、双曲柄机 构和双摇杆机构。
机械设计基础第2章 机械传动装置的总体设计PPT课件
表2-3 机械传动的效率概略值
滑动轴承
润滑不良
润滑正常
润滑特好 (压力润滑)
液体摩擦
0.94(一对) 0.97(一对) 0.98(一对)
0.99(一对)
带传动 链传动
平带无压 紧轮的开式
平带有压 紧轮的开式
平带交叉 式 滚动轴承
滚子链
0.98
0.97
类型 一级圆柱齿轮减速器
2.1 传动方案分析
表2-1 常用减速器的类型和特点
简图及特点
传动比一般小于5,使用直齿、斜齿或人字 齿轮,传递功率可达数万千瓦,效率较高、 工艺简单、精度易于保证,一般工厂均能制 造,应用广泛。轴线可作水平布置、上下布 置或铅垂布置
二级圆柱齿轮减速器
2.1 传动方案分析
≤25~30 ≤20
外廓尺寸
大
大
大
大 (最大达50 000)
圆柱齿轮 锥齿轮
3~5
2~3
8
5
小 (≤50) 10~40
80
6级精度直齿≤18m ≤15~35 /s,非直齿≤36m/s; 5级精度达100
小
小
2.1 传动方案分析
表2-2 常用传动机构的性能及适用范围
传动精度
低
工作平稳性
好
自锁能力
无
过载保护作用
类型 一级锥齿轮减速器
一级蜗杆减速器
2.1 传动方案分析
表2-1 常用减速器的类型和特点
简图及特点
传动比一般小于3,使用直齿、斜齿或曲齿 齿轮
结构简单,尺寸紧凑,但效率较低,适用 于载荷较小、间歇工作的场合。蜗杆圆周速 度≤4~5m/s时采用蜗杆下置式,蜗杆圆周速 度>4~5m/s时采用蜗杆上置式。采用立轴布 置时密封要求高
机械设计基础第五版(高等教育出版)第2章

将以上三式两两相加得: l1≤ l2,l1≤ l3,l1≤ l4
铰链四杆机构整转副存在条件
综上,得到整转副存在条件: 最长杆与最短杆的长度之和≤其他两杆长度之和 ——杆长条件 若取BC为机架,结论相同,即:铰链B也是整转副。 结论:当满足杆长条件时,最短杆参与构成的转动 副都是整转副。 C
l2 B A l1 l4 D l3
4
平面四杆机构的基本型式和特性
2. 双曲柄机构 组成:两个曲柄+连杆+机架 等速回转 作用:等速回转⇔ 变速回转 应用实例:叶片泵、惯性 筛等。
2 1 4 3 1
3 2 4
摇杆主动
缝纫机踏板机构
平面四杆机构的基本型式和特性
A B D 2 C 3 4 6 C 2 3 B 1 4 D A E
1
惯性筛机构
4 C 曲柄滑块机构 C 3
这种通过选择不同构件作为机架以获得不同机构的 方法称为:机构倒置
铰链四杆机构的演化
例:选择双滑块机构中的不同构件 作为机架可得不同的机构
2 1 3 正弦机构 4 3 椭圆仪机构 4
2 1
§2-4 平面四杆机构的设计
设计主要目的 根据给定运动条件,确定机构类型和运动尺寸;有时 还需满足辅助条件(如γmin)。 两类主要设计问题 ①按照给定从动件运动规律(位移、速度、加速度) 设计四杆机构; ②按照给定点的运动轨迹设计四杆机构。 设计方法 解析法、图解法、实验法。
第2章 平面连杆机构
§2-1 平面四杆机构的基本型式和特性 §2-2 铰链四杆机构整转副存在条件 §2-3 铰链四杆机构的演化 §2-4 平面四杆机构的设计
§2-1 平面四杆机构的基本型式和特性
连杆机构—机构中所有的运动副均为低副。 连杆—机构中做一般平面运动(非简单的转动或直 线移动)的构件。 应用实例 内燃机、起重机变幅机构、牛头刨床、翻箱机、椭圆仪、 机械手爪等。 优点: ①低副为面接触,承载能力大、便于润滑、耐磨性好、 容易获得较高的制造精度; ②改变杆长,即可实现不同的从动件运动规律; ③连杆曲线丰富,可满足不同要求。
《机械设计基础》第2章_平面连杆机构解析
0 0
由上式可知,机构的急回程度取决于极位夹
角θ的大小。θ角越大,K值越大,机构的急回程
度也越高,但机构运动的平稳性就越差。反之反 然。 一般机械中1≤K≤2。
5.连杆机构具有急回特性的条件
⑴ 输入件等速整周转动;
⑵ 输出件往复运动;
⑶ 极位夹角
。 0
6.常见具有急回特性的四杆机构
二、平面连杆机构的特点及应用
1.平面连杆机构的特点
⑴寿命长 低副联接,接触表面为平面或圆柱面,
压力小;便于润滑,磨损较小。
⑵易于制造 连杆机构以杆件为主,结构简单。 ⑶可实现远距离操纵控制 因连杆易于作成较长
的构件。
⑷可实现比较复杂的运动规律 ⑸设计计算较繁复,当机构复杂时累计误差较大,
2、双曲柄机构
具有两个曲柄的铰链四杆机构。
⑴平行四边形机构:连杆与机架的长度相等,且曲
柄的转向相同长度也相等的双曲柄机构。 这种机构两曲柄的角速度始终保持相等,且连杆 始终做平动,故应用较广。
运动的不确定性
有辅助构件的重复机构
有辅助构件的错列机构
⑵逆平行四边形机构:连杆与机架的长度相等,两
含有两个移动副的四杆机构应用实例
2.3 平面四杆机构的基本特性
一、铰链四杆机构存在曲柄的条件
设 AB 为曲柄,
由 △BCD :
且 a <d .
b+c>f 、 b+f >c 、 c+f >b
以 fmax = a + d , fmin = d - a b+c >a+d 、 b+d >a+c 、 c+d >a+b 化简后得: a<b 、 a<c 、 a< d 若 d <a d<a、d<b、d<c 代入并整理得:
由上式可知,机构的急回程度取决于极位夹
角θ的大小。θ角越大,K值越大,机构的急回程
度也越高,但机构运动的平稳性就越差。反之反 然。 一般机械中1≤K≤2。
5.连杆机构具有急回特性的条件
⑴ 输入件等速整周转动;
⑵ 输出件往复运动;
⑶ 极位夹角
。 0
6.常见具有急回特性的四杆机构
二、平面连杆机构的特点及应用
1.平面连杆机构的特点
⑴寿命长 低副联接,接触表面为平面或圆柱面,
压力小;便于润滑,磨损较小。
⑵易于制造 连杆机构以杆件为主,结构简单。 ⑶可实现远距离操纵控制 因连杆易于作成较长
的构件。
⑷可实现比较复杂的运动规律 ⑸设计计算较繁复,当机构复杂时累计误差较大,
2、双曲柄机构
具有两个曲柄的铰链四杆机构。
⑴平行四边形机构:连杆与机架的长度相等,且曲
柄的转向相同长度也相等的双曲柄机构。 这种机构两曲柄的角速度始终保持相等,且连杆 始终做平动,故应用较广。
运动的不确定性
有辅助构件的重复机构
有辅助构件的错列机构
⑵逆平行四边形机构:连杆与机架的长度相等,两
含有两个移动副的四杆机构应用实例
2.3 平面四杆机构的基本特性
一、铰链四杆机构存在曲柄的条件
设 AB 为曲柄,
由 △BCD :
且 a <d .
b+c>f 、 b+f >c 、 c+f >b
以 fmax = a + d , fmin = d - a b+c >a+d 、 b+d >a+c 、 c+d >a+b 化简后得: a<b 、 a<c 、 a< d 若 d <a d<a、d<b、d<c 代入并整理得:
机械设计基础第四版第2章
动画演示
例题:
例题 1)如果该机构能成为曲柄摇杆机构,且AB是曲柄,求AB的取值 范围;
2)如果该机构能成为双曲柄机构,求AB的最小值;
3)如果该机构能成为双摇杆机构,求AB的取值范围。
50
C
(1) AB为最短
B
35
l AB
l AB 50
30 35 30
l AB
15
(2) AAD为30最短 D
(lAB )max 15mm
503030lABl
AB
50 35
45
l AB
50
或
lAB
l AB 30
50 50
35
50
l AB
55
lAB 50 30 35 115mm
(lAB )min 45mm
(3)只能考虑不满足杆长和条件下的机构
AB为最短
lAB
l AB 50
30 35
50
C
35
A 30
D
§2-2 铰链四杆机构的演化
一、曲柄滑块机构 广泛用与内燃机、冲床等,将回转 运动转变为直线运动或反之。
e=0 时,对心;e≠0时,偏置。
对心没急回特性, 滑块为原动件时有死点,
铰链四杆机构的演化
二、曲柄滑块机构的演化(取不同构件为机架或改变杆长)
1.导杆机构
小型刨床应用实例
t1 / t2
180 180
2)压力角与传动角 压力角——从动件受力方向与受力 点绝对速度方向的夹角
铰链四杆机构
Psin----有害分力
P
Pcos-----有效分力
希望小好,不便度量,用其余角来度量, 称为传动角, 所以大,传力性能好. 是变化的, min≧ 40°
例题:
例题 1)如果该机构能成为曲柄摇杆机构,且AB是曲柄,求AB的取值 范围;
2)如果该机构能成为双曲柄机构,求AB的最小值;
3)如果该机构能成为双摇杆机构,求AB的取值范围。
50
C
(1) AB为最短
B
35
l AB
l AB 50
30 35 30
l AB
15
(2) AAD为30最短 D
(lAB )max 15mm
503030lABl
AB
50 35
45
l AB
50
或
lAB
l AB 30
50 50
35
50
l AB
55
lAB 50 30 35 115mm
(lAB )min 45mm
(3)只能考虑不满足杆长和条件下的机构
AB为最短
lAB
l AB 50
30 35
50
C
35
A 30
D
§2-2 铰链四杆机构的演化
一、曲柄滑块机构 广泛用与内燃机、冲床等,将回转 运动转变为直线运动或反之。
e=0 时,对心;e≠0时,偏置。
对心没急回特性, 滑块为原动件时有死点,
铰链四杆机构的演化
二、曲柄滑块机构的演化(取不同构件为机架或改变杆长)
1.导杆机构
小型刨床应用实例
t1 / t2
180 180
2)压力角与传动角 压力角——从动件受力方向与受力 点绝对速度方向的夹角
铰链四杆机构
Psin----有害分力
P
Pcos-----有效分力
希望小好,不便度量,用其余角来度量, 称为传动角, 所以大,传力性能好. 是变化的, min≧ 40°
机械设计第二章优秀课件

在作用于刚体的任一力系上,加上或者 减去任意一个平衡力系,不改变原力系 对刚体的作用效果。
该公理对变形体只是必要条件,而 非充分条件。
(力系的等效代换条件)
静力学基本概念与受力图
基本公理与定理
*只适用于刚体,
由此可得如下推论:(力的可传性)
作用于刚体的力可沿其作用线移至刚体的任一点, 而不改变此力对刚体的效应。
机械设计第二章课件
静力学基本概念与受力图
力的概念
力是物体间相互的机械作用,其结果是使 物体的运动状态发生改变(外效应)或使 物体产生变形(内效应)。
力对物体的作用效果与力的大小、方 向、作用点相关,其称为力的三要素 。因此,力是矢量。
静力学基本概念与受力图 集中力
力的概念
用黑体大写字母表示是矢量,如F,Q,W
1)力在坐标轴上的投影
y
X F cos Y F sin
b1 Fy Y
a1 A
B
F
Fx
a
O
X
bx
1、平面汇交力系合成的解析法 2)合力投影定理
合力在任意轴上的投影,等于各分力在同一轴上投 影的代数和。
Rx X Ry Y
RR R 2 2( X)2( Y)2 xy
tg Ry Y Rx X
3)平面汇交力系平衡方程及其应用
为研究平衡规律
进行力系简化
力系简化:
用一个简单且与之等效的力系代替一 个复杂力系
等效力系: 两力系对同一物体作用效果相同,则此二 力系等效
合力: 若一个力与一个力系等效,则该力称 为力系的合力
分力: 力系中各个力称为分力
静力学基本概念与受力图
基本公理与定理
公理一、力的平行四边形法则 作用在物体上同一点的两个力可以合成为一个 合力,合力的作用点也在该点,其大小和方向 由以这两个力为边的平行四边形的对角线所确 定。
该公理对变形体只是必要条件,而 非充分条件。
(力系的等效代换条件)
静力学基本概念与受力图
基本公理与定理
*只适用于刚体,
由此可得如下推论:(力的可传性)
作用于刚体的力可沿其作用线移至刚体的任一点, 而不改变此力对刚体的效应。
机械设计第二章课件
静力学基本概念与受力图
力的概念
力是物体间相互的机械作用,其结果是使 物体的运动状态发生改变(外效应)或使 物体产生变形(内效应)。
力对物体的作用效果与力的大小、方 向、作用点相关,其称为力的三要素 。因此,力是矢量。
静力学基本概念与受力图 集中力
力的概念
用黑体大写字母表示是矢量,如F,Q,W
1)力在坐标轴上的投影
y
X F cos Y F sin
b1 Fy Y
a1 A
B
F
Fx
a
O
X
bx
1、平面汇交力系合成的解析法 2)合力投影定理
合力在任意轴上的投影,等于各分力在同一轴上投 影的代数和。
Rx X Ry Y
RR R 2 2( X)2( Y)2 xy
tg Ry Y Rx X
3)平面汇交力系平衡方程及其应用
为研究平衡规律
进行力系简化
力系简化:
用一个简单且与之等效的力系代替一 个复杂力系
等效力系: 两力系对同一物体作用效果相同,则此二 力系等效
合力: 若一个力与一个力系等效,则该力称 为力系的合力
分力: 力系中各个力称为分力
静力学基本概念与受力图
基本公理与定理
公理一、力的平行四边形法则 作用在物体上同一点的两个力可以合成为一个 合力,合力的作用点也在该点,其大小和方向 由以这两个力为边的平行四边形的对角线所确 定。
机械设计基础ppt第二章
主要内容
用速度瞬心法作机构的速度分析
速度瞬心及其求法
速度瞬心(瞬心)的概念
• 速度瞬心(瞬心)——作相对平
面运动的两构件(刚体)瞬时相 对速度为零的重合点,即瞬时 绝对速度相等的重合点(即同速 点)。如右图所示。
• 如果两构件都是运动的,则其瞬心称为相对速度瞬心;如 果两构件中有一个是静止的,则其瞬心称为绝对速度瞬心。 因静止构件的绝对速度为零,所以绝对瞬心是运动刚体上 瞬时绝对速度等于零的点。 • 在机构分析中,瞬心概念适用于任意两个构件(运动构件 或固定构件)间的运动关系。 2. 机构瞬心的数目 • 由于作相对运动的任意两个构件都有一个瞬心,如果一个 机构中含有 K个构件,则其瞬心数目N为
A、铰链四杆机构
4、速度瞬心在机构速度分析中的应用
例1:图示机构中,已知 lAB, lBC φ,构件1以 ω逆 时针方向转动。 求:①机构的全部瞬心位置;②从动件3的速度。
P24
P34 P13 B(P12 ) 1 A (P14 ) 4 3 1 2 C(P23 )
例2:凸轮以匀速逆时 针转动,求该位置时从 动件2的速度V2。
3 2
P23
B
P13 P12
1
注意:1.速度瞬心法只能对机构进行速 度分析,不能加速度分析。2.构件数目 较少时用。
A
p13 1 P12 2 p23 3
v p12 1 p13 p12 2 p23 p12 p23 p12 1 2 p13 p12
N K ( K 1) 2 (1 2)
3、机构中瞬心位置的确定
A、两直接接触构件的瞬心 ⑴、通过转动副直接接触,瞬心为其转动中心
⑵、通过移动副直接接触,瞬心在垂直导路的 无穷远处。
⑶、通过高副直接接触,
用速度瞬心法作机构的速度分析
速度瞬心及其求法
速度瞬心(瞬心)的概念
• 速度瞬心(瞬心)——作相对平
面运动的两构件(刚体)瞬时相 对速度为零的重合点,即瞬时 绝对速度相等的重合点(即同速 点)。如右图所示。
• 如果两构件都是运动的,则其瞬心称为相对速度瞬心;如 果两构件中有一个是静止的,则其瞬心称为绝对速度瞬心。 因静止构件的绝对速度为零,所以绝对瞬心是运动刚体上 瞬时绝对速度等于零的点。 • 在机构分析中,瞬心概念适用于任意两个构件(运动构件 或固定构件)间的运动关系。 2. 机构瞬心的数目 • 由于作相对运动的任意两个构件都有一个瞬心,如果一个 机构中含有 K个构件,则其瞬心数目N为
A、铰链四杆机构
4、速度瞬心在机构速度分析中的应用
例1:图示机构中,已知 lAB, lBC φ,构件1以 ω逆 时针方向转动。 求:①机构的全部瞬心位置;②从动件3的速度。
P24
P34 P13 B(P12 ) 1 A (P14 ) 4 3 1 2 C(P23 )
例2:凸轮以匀速逆时 针转动,求该位置时从 动件2的速度V2。
3 2
P23
B
P13 P12
1
注意:1.速度瞬心法只能对机构进行速 度分析,不能加速度分析。2.构件数目 较少时用。
A
p13 1 P12 2 p23 3
v p12 1 p13 p12 2 p23 p12 p23 p12 1 2 p13 p12
N K ( K 1) 2 (1 2)
3、机构中瞬心位置的确定
A、两直接接触构件的瞬心 ⑴、通过转动副直接接触,瞬心为其转动中心
⑵、通过移动副直接接触,瞬心在垂直导路的 无穷远处。
⑶、通过高副直接接触,
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
速度瞬心及其求法
速度瞬心(瞬心)的概念
速度瞬心(瞬心)——作相对平 面运动的两构件(刚体)瞬时相 对速度为零的重合点,即瞬时 绝对速度相等的重合点(即同速 点)。如右图所示。
如果两构件都是运动的,则其瞬心称为相对速度瞬心;如 果两构件中有一个是静止的,则其瞬心称为绝对速度瞬心。 因静止构件的绝对速度为零,所以绝对瞬心是运动刚体上 瞬时绝对速度等于零的点。
在机构分析中,瞬心概念适用于任意两个构件(运动构件 或固定构件)间的运动关系。
2. 机构瞬心的数目
由于作相对运动的任意两个构件都有一个瞬心,如果一个
机构中含有 K个构件,则其瞬心数目N为
N K (K 1) 2
(1 2)
3、机构中瞬心位置的确定 A、两直接接触构件的瞬心 ⑴、通过转动副直接接触,瞬心为其转动中心
时针方向转动。
φ,构件1以 ω逆
求:①机构的全部瞬心位置;②从动件3的速度。
P34 P13
B(P12 )
P24
例2:凸轮以匀速逆时 针转动,求该位置时从 动件2的速度V2。
1
A
1
(P14 )
4
2 C(P23)
3
3
P23
2
B
注意:1.速度瞬心法只能对机构进行速 度分析,不能加速度分析。2.构件数目 较少时用。
P13
A
P12
1
精品课件!
精品课件!
p13 1
P12 2 p23
3
v p12 1 p13 p12 2 p23 p12
1 p23 p12
2
p13 p12
⑵、通过移动副直接接触,瞬心在垂直导路的 无穷远处。
⑶、通过高副直接接触, 若两构件为纯滚动,瞬心在接触处; 若不是纯滚动,瞬心在过接触点的公法线上。
Hale Waihona Puke 三心定理三心定理:三个彼此做平面运动的构件 的三个瞬心必位于同一条直线上。
A、铰链四杆机构
4、速度瞬心在机构速度分析中的应用
例1:图示机构中,已知 lAB, lBC
速度瞬心(瞬心)的概念
速度瞬心(瞬心)——作相对平 面运动的两构件(刚体)瞬时相 对速度为零的重合点,即瞬时 绝对速度相等的重合点(即同速 点)。如右图所示。
如果两构件都是运动的,则其瞬心称为相对速度瞬心;如 果两构件中有一个是静止的,则其瞬心称为绝对速度瞬心。 因静止构件的绝对速度为零,所以绝对瞬心是运动刚体上 瞬时绝对速度等于零的点。
在机构分析中,瞬心概念适用于任意两个构件(运动构件 或固定构件)间的运动关系。
2. 机构瞬心的数目
由于作相对运动的任意两个构件都有一个瞬心,如果一个
机构中含有 K个构件,则其瞬心数目N为
N K (K 1) 2
(1 2)
3、机构中瞬心位置的确定 A、两直接接触构件的瞬心 ⑴、通过转动副直接接触,瞬心为其转动中心
时针方向转动。
φ,构件1以 ω逆
求:①机构的全部瞬心位置;②从动件3的速度。
P34 P13
B(P12 )
P24
例2:凸轮以匀速逆时 针转动,求该位置时从 动件2的速度V2。
1
A
1
(P14 )
4
2 C(P23)
3
3
P23
2
B
注意:1.速度瞬心法只能对机构进行速 度分析,不能加速度分析。2.构件数目 较少时用。
P13
A
P12
1
精品课件!
精品课件!
p13 1
P12 2 p23
3
v p12 1 p13 p12 2 p23 p12
1 p23 p12
2
p13 p12
⑵、通过移动副直接接触,瞬心在垂直导路的 无穷远处。
⑶、通过高副直接接触, 若两构件为纯滚动,瞬心在接触处; 若不是纯滚动,瞬心在过接触点的公法线上。
Hale Waihona Puke 三心定理三心定理:三个彼此做平面运动的构件 的三个瞬心必位于同一条直线上。
A、铰链四杆机构
4、速度瞬心在机构速度分析中的应用
例1:图示机构中,已知 lAB, lBC