斜坡补偿(3842)
开关电源中斜坡补偿电路的分析与设计
开关电源中斜坡补偿电路的分析与设计
1.引言
开关电源是利用现代电力电子技术,控制开关晶体管的导通和关断的时间比率,维持输出电压稳定的一种电源,它和线性电源相比,具有效率高、功率密度高、可以实现和输人电网的电气隔离等优点,被誉为离效节能电源M 目前开关电源已经应用到了各个领域,尤其在大功率应用的场合,开关电源具有明显的优势。
开关电源一般由脉冲宽度控制(PWM)IC、功率开关管、整流二极管和LC
滤波电路构成。
在中小功率开关电源中,功率开关管可以集成在PWM控制IC内。
开关电源按反馈方式分为电压模式和电流模式。
电流模式开关电源因其突出的优点而得到了快速的发展和广泛的应用。
但是电流模式的结构决定了它存在两个缺点:恒定峰值电流而非恒定平均电流引起的系统开环不稳定:占空比大于50%时系统的开环不稳定。
本文旨在从原理上分析传统电流模式的缺陷及改进方案,之后分析一个实用的斜坡补偿电路。
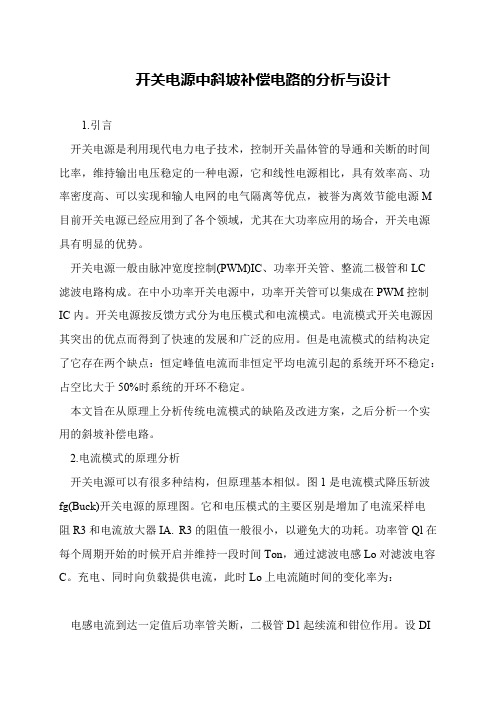
2.电流模式的原理分析
开关电源可以有很多种结构,但原理基本相似。
图1是电流模式降压斩波fg(Buck)开关电源的原理图。
它和电压模式的主要区别是增加了电流采样电
阻R3和电流放大器IA. R3的阻值一般很小,以避免大的功耗。
功率管Ql在每个周期开始的时候开启并维持一段时间Ton,通过滤波电感Lo对滤波电容C。
充电、同时向负载提供电流,此时Lo上电流随时间的变化率为:
电感电流到达一定值后功率管关断,二极管D1起续流和钳位作用。
设DI。
UC384X的斜坡补偿
【原创】UC384X 的斜坡补偿⒈ UC384X 的特点UC3842/UC3843/UC3845是高性能固定频率电流模式的PWM 控制器系列,在这里简称UC384X 。
它们的工作原理和电路结构基本一样,只是个别参数不同。
UC384X 的主要优点是电压调整率可达0.01%/V ,工作频率可达500MHz 。
最高输入电压为30V ,最大输出电流为1A ,能驱动双极型功率管或MOSFET 管。
UC384X 的外围元件少,利用高频变压器实现与电网的隔离。
因此UC384X 通常被用来构成开关电源。
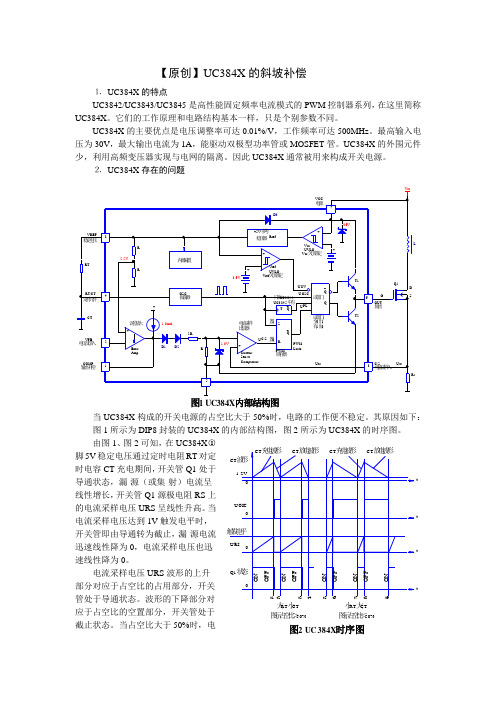
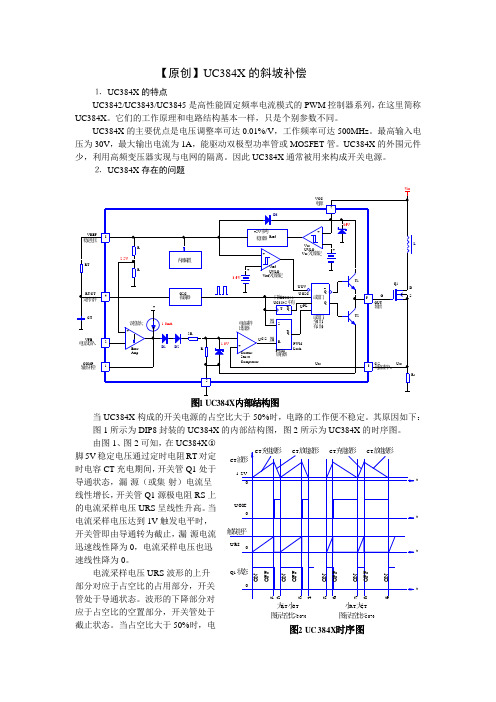
⒉ UC384X 存在的问题当UC384X 构成的开关电源的占空比大于50%时,电路的工作便不稳定。
其原因如下:图1所示为DIP8封装的UC384X 的内部结构图,图2所示为UC384X 的时序图。
由图1、图2可知,在UC384X ○8脚5V 稳定电压通过定时电阻RT 对定时电容CT 充电期间,开关管Q1处于导通状态,漏-源(或集-射)电流呈线性增长,开关管Q1源极电阻RS 上的电流采样电压URS 呈线性升高。
当电流采样电压达到1V 触发电平时,开关管即由导通转为截止,漏-源电流迅速线性降为0,电流采样电压也迅速线性降为0。
电流采样电压URS 波形的上升部分对应于占空比的占用部分,开关管处于导通状态。
波形的下降部分对应于占空比的空置部分,开关管处于截止状态。
当占空比大于50%时,电流采样电压URS波形的上升部分长于下降部分,上升部分的坡度即斜坡变得平缓,占空比越大,斜坡越平缓。
当较平缓的斜坡的顶部接近触发电平时,只要有很小的干扰脉冲混入,例如在tt时刻就有一个干扰脉冲出现(参见图3),开关管即提前截止,结果造成开关电源工作的不稳定。
⒊对UC384X的斜坡补偿为了保证在占空比大于50%时开关电源也能稳定工作,需要对电路进行斜坡补偿,或称斜率补偿。
斜坡补偿有多种方式,图3(a)所示的实例中采用的是将定时电容C1的充电波形与电流采样电压UR5的波形相叠加的方法。
详解开关电源斜坡补偿的推导过程
详解开关电源斜坡补偿的推导过程
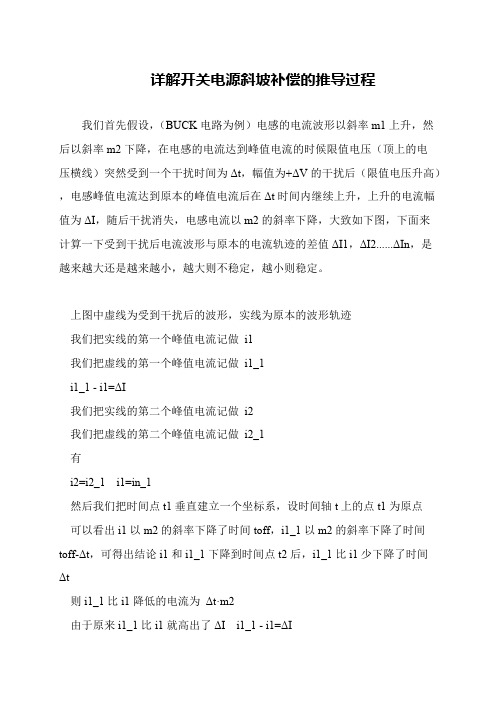
我们首先假设,(BUCK电路为例)电感的电流波形以斜率m1上升,然后以斜率m2下降,在电感的电流达到峰值电流的时候限值电压(顶上的电
压横线)突然受到一个干扰时间为Δt,幅值为+ΔV的干扰后(限值电压升高),电感峰值电流达到原本的峰值电流后在Δt时间内继续上升,上升的电流幅值为ΔI,随后干扰消失,电感电流以m2的斜率下降,大致如下图,下面来
计算一下受到干扰后电流波形与原本的电流轨迹的差值ΔI1,ΔI2......ΔIn,是
越来越大还是越来越小,越大则不稳定,越小则稳定。
上图中虚线为受到干扰后的波形,实线为原本的波形轨迹
我们把实线的第一个峰值电流记做i1
我们把虚线的第一个峰值电流记做i1_1
i1_1 - i1=ΔI
我们把实线的第二个峰值电流记做i2
我们把虚线的第二个峰值电流记做i2_1
有
i2=i2_1 i1=in_1
然后我们把时间点t1垂直建立一个坐标系,设时间轴t上的点t1为原点
可以看出i1以m2的斜率下降了时间toff,i1_1以m2的斜率下降了时间toff-Δt,可得出结论i1和i1_1下降到时间点t2后,i1_1比i1少下降了时间
Δt
则i1_1比i1降低的电流为Δt·m2
由于原来i1_1比i1就高出了ΔI i1_1 - i1=ΔI。
斜坡补偿技术
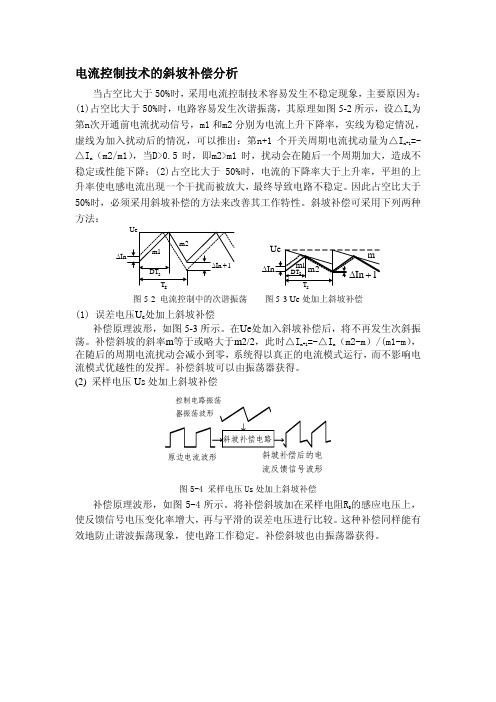
电流控制技术的斜坡补偿分析当占空比大于50%时,采用电流控制技术容易发生不稳定现象,主要原因为:(1)占空比大于50%时,电路容易发生次谐振荡,其原理如图5-2所示,设△I n 为第n次开通前电流扰动信号,m1和m2分别为电流上升下降率,实线为稳定情况,虚线为加入扰动后的情况,可以推出:第n+1个开关周期电流扰动量为△I n+1=-△I n (m2/m1),当D>0.5时,即m2>m1时,扰动会在随后一个周期加大,造成不稳定或性能下降;(2)占空比大于50%时,电流的下降率大于上升率,平坦的上升率使电感电流出现一个干扰而被放大,最终导致电路不稳定。
因此占空比大于50%时,必须采用斜坡补偿的方法来改善其工作特性。
斜坡补偿可采用下列两种方法:ΔΔ图5-2 电流控制中的次谐振荡 图5-3 Ue 处加上斜坡补偿(1) 误差电压U e 处加上斜坡补偿补偿原理波形,如图5-3所示。
在Ue 处加入斜坡补偿后,将不再发生次斜振荡。
补偿斜坡的斜率m 等于或略大于m2/2,此时△I n+1=-△I n (m2-m)/(m1-m),在随后的周期电流扰动会减小到零,系统得以真正的电流模式运行,而不影响电流模式优越性的发挥。
补偿斜坡可以由振荡器获得。
(2) 采样电压Us 处加上斜坡补偿斜坡补偿电路器振荡波形控制电路振荡原边电流波形流反馈信号波形斜坡补偿后的电图5-4 采样电压Us 处加上斜坡补偿补偿原理波形,如图5-4所示。
将补偿斜坡加在采样电阻R S 的感应电压上,使反馈信号电压变化率增大,再与平滑的误差电压进行比较。
这种补偿同样能有效地防止谐波振荡现象,使电路工作稳定。
补偿斜坡也由振荡器获得。
活学活用PWM控制器之斜坡补偿方法科普
活学活用PWM控制器之斜坡补偿方法科普
PWM控制器作为一种非常常见的重要电子元件,在中小功率开关电源
及消费类电子产品的电路系统设计中应用广泛。
本文将会针对PWM控制器
的斜坡补偿方法进行简单介绍和科普,希望能够对正在进行电子技术学习的
爱好者和初学者带来一定的帮助。
在一些中小功率开关电源模块的研制过程中,很多工程师都需要面对一个
问题,那就是在采用了电流型PWM控制器的电路系统中,会出现输出电压
正比于输出电流平均值而不是正比于峰值电流的情况。
众所周知,功率开关
管的峰值电流由PWM控制器保持恒定控制,当输入电压减小时,为了使电
流恒定,占空比将调节为D2,这时平均电流将上升为I2,输出电压也将上升。
在电流型控制器件的调节下,仅有输出电压能够得到控制。
那幺,采用斜坡补偿的方式可以解决电流型PWM控制器的这一应用弊端吗?答案是肯定的。
首先来看斜坡补偿的技术原理。
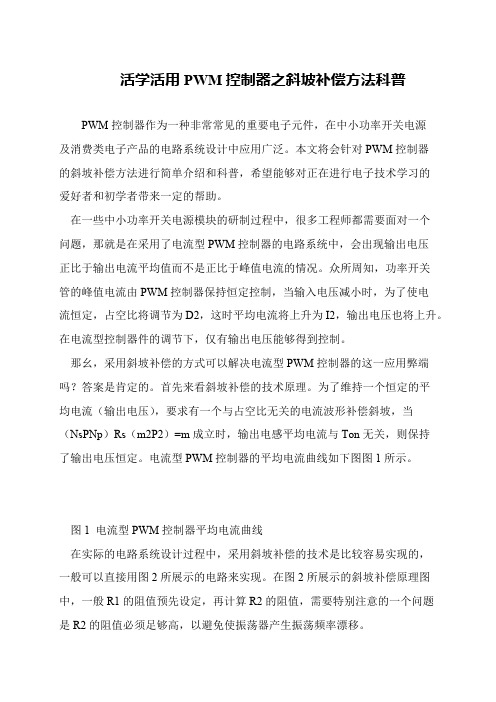
为了维持一个恒定的平
均电流(输出电压),要求有一个与占空比无关的电流波形补偿斜坡,当(NsPNp)Rs(m2P2)=m成立时,输出电感平均电流与Ton无关,则保持
了输出电压恒定。
电流型PWM控制器的平均电流曲线如下图图1所示。
图1 电流型PWM控制器平均电流曲线
在实际的电路系统设计过程中,采用斜坡补偿的技术是比较容易实现的,
一般可以直接用图2所展示的电路来实现。
在图2所展示的斜坡补偿原理图中,一般R1的阻值预先设定,再计算R2的阻值,需要特别注意的一个问题
是R2的阻值必须足够高,以避免使振荡器产生振荡频率漂移。
电流型变换器工作原理和斜坡补偿
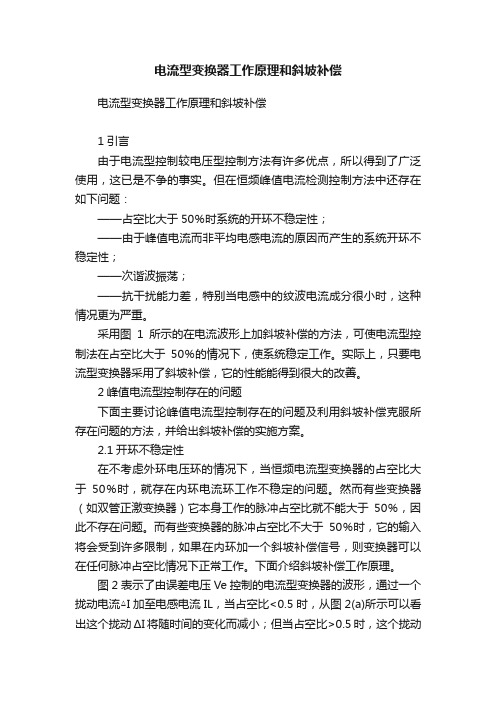
电流型变换器工作原理和斜坡补偿电流型变换器工作原理和斜坡补偿1引言由于电流型控制较电压型控制方法有许多优点,所以得到了广泛使用,这已是不争的事实。
但在恒频峰值电流检测控制方法中还存在如下问题:——占空比大于50%时系统的开环不稳定性;——由于峰值电流而非平均电感电流的原因而产生的系统开环不稳定性;——次谐波振荡;——抗干扰能力差,特别当电感中的纹波电流成分很小时,这种情况更为严重。
采用图1所示的在电流波形上加斜坡补偿的方法,可使电流型控制法在占空比大于50%的情况下,使系统稳定工作。
实际上,只要电流型变换器采用了斜坡补偿,它的性能能得到很大的改善。
2峰值电流型控制存在的问题下面主要讨论峰值电流型控制存在的问题及利用斜坡补偿克服所存在问题的方法,并给出斜坡补偿的实施方案。
2.1开环不稳定性在不考虑外环电压环的情况下,当恒频电流型变换器的占空比大于50%时,就存在内环电流环工作不稳定的问题。
然而有些变换器(如双管正激变换器)它本身工作的脉冲占空比就不能大于50%,因此不存在问题。
而有些变换器的脉冲占空比不大于50%时,它的输入将会受到许多限制,如果在内环加一个斜坡补偿信号,则变换器可以在任何脉冲占空比情况下正常工作。
下面介绍斜坡补偿工作原理。
图2表示了由误差电压Ve控制的电流型变换器的波形,通过一个拢动电流△I加至电感电流IL,当占空比<0.5时,从图2(a)所示可以看出这个拢动ΔI将随时间的变化而减小;但当占空比>0.5时,这个拢动将随时间增加而增加,。
这可用数学表达式表示:ΔI1=-ΔI0(m2/m1)(1)进一步可引入斜率为-m的斜坡信号,。
这个斜坡电压既可加至电流波形上,也可以从误差电压中减去。
有下列方程式成立:ΔI1=-ΔI0(m2+m)/(m1+m)(2)图1采用斜坡补偿的BUCK电流型控制图2电流型变换器的开环不稳定性(a)D<0.5(b)D>0.5(c)D>0.5并加斜坡补偿图3没有斜坡补偿的峰值电流检测与占空比关系图图4斜坡补偿m=-(1/2)m2时的平均电感电流将和占空比D、输入电压无关在100%占空比下求解这个方程有:m>(-1/2)/m2(3)为了保证电流环路稳定工作,应使斜坡补偿信号的斜率大于电流波形下降斜率m2的1/2。
UC384X的斜坡补偿
【原创】UC384X 的斜坡补偿⒈ UC384X 的特点UC3842/UC3843/UC3845是高性能固定频率电流模式的PWM 控制器系列,在这里简称UC384X 。
它们的工作原理和电路结构基本一样,只是个别参数不同。
UC384X 的主要优点是电压调整率可达0.01%/V ,工作频率可达500MHz 。
最高输入电压为30V ,最大输出电流为1A ,能驱动双极型功率管或MOSFET 管。
UC384X 的外围元件少,利用高频变压器实现与电网的隔离。
因此UC384X 通常被用来构成开关电源。
⒉ UC384X 存在的问题当UC384X 构成的开关电源的占空比大于50%时,电路的工作便不稳定。
其原因如下:图1所示为DIP8封装的UC384X 的内部结构图,图2所示为UC384X 的时序图。
由图1、图2可知,在UC384X ○8脚5V 稳定电压通过定时电阻RT 对定时电容CT 充电期间,开关管Q1处于导通状态,漏-源(或集-射)电流呈线性增长,开关管Q1源极电阻RS 上的电流采样电压URS 呈线性升高。
当电流采样电压达到1V 触发电平时,开关管即由导通转为截止,漏-源电流迅速线性降为0,电流采样电压也迅速线性降为0。
电流采样电压URS 波形的上升部分对应于占空比的占用部分,开关管处于导通状态。
波形的下降部分对应于占空比的空置部分,开关管处于截止状态。
当占空比大于50%时,电流采样电压URS波形的上升部分长于下降部分,上升部分的坡度即斜坡变得平缓,占空比越大,斜坡越平缓。
当较平缓的斜坡的顶部接近触发电平时,只要有很小的干扰脉冲混入,例如在tt时刻就有一个干扰脉冲出现(参见图3),开关管即提前截止,结果造成开关电源工作的不稳定。
⒊对UC384X的斜坡补偿为了保证在占空比大于50%时开关电源也能稳定工作,需要对电路进行斜坡补偿,或称斜率补偿。
斜坡补偿有多种方式,图3(a)所示的实例中采用的是将定时电容C1的充电波形与电流采样电压UR5的波形相叠加的方法。
斜波补偿(中文)
注:本文是U-111中斜率补偿的翻译(PRACTICAL CONSIDERATIONS IN CURRENT MODE POWER SUPPLIES)。译文的后半部非本人翻译(译者不详)。由于本人是 电源新手,因此许多地方翻译生硬。不足之处,希望各位同行能及时指出,以便 本人及时改正。
图 5 叠加原理简化电路
简化为
V =VS +VS (RAMP)
‘‘ (L)
(COMP)
其中,
和
第六步:计算斜率补偿
VS =MS (COMP)
‘‘ (L)
其中M是电感下降斜率引入量。
求出R2
新南威尔士大学 阿客东 译
斜率补偿计算设计举例
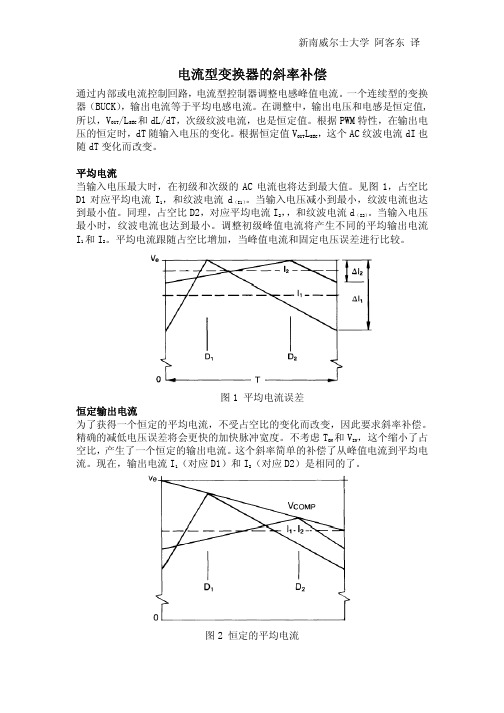
电路拓扑:半桥变换器 输入电压:85~132V AC 输出:5V DC/45A DC 频率:200KHZ,T(周期)=5.0us T(空载时间):500ns,Ton(最大)=4.5us(Ton 导通时间) 转载比率:15/1(Np/Ns) V(初级电压):90V DC 最小,186 最大 VSEC 最小:6V DC RSENSE:0.25Ω ISEC(AC):3A(<10% IDC) L(输出):5.1uH
图 2 恒定的平均电流
新南威尔士大学 阿客东 译
确定斜率补偿 从数学公式上看,补偿斜率必须等于输出电感下降斜率的50%。关于这个论点可 以 看 文 章 “ Modelling, Analysis and Compensating of the Current Mode Controller,” (Unitrode publication U-97 and its references)。当占空比 大于50%时,开环工作电流就存在不稳定的问题。如果在开环上加一个斜率补偿 信号,则变换器可以在任何占空比情况下正常工作。从经验上说,75%的斜率补 偿是比较常用的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图 4 占空比大于 50 %并带坡度补偿
图 5 - m = m2 时 ,电感电流波形
对于 BUC K 电路 , 补偿坡度是 V O/ L , 由于输 出电压恒定 , 所以补偿值便于计算并恒定; 对于 BOOST 电路 ,补偿坡度是 ( V IN - V O) / L , 由于输入 电压随电网变化 ,所以补偿值不恒定 ,这样对于固定 补偿网络 ,很多时候会发生过补偿或补偿不足 ,降低 了电路的性能并导致波形畸变 , 因此 BOOST 电路 通常不采用峰值电流控制而采用平均电流控制的模 式 ,来避免斜坡补偿 。 2. 2 减小尖峰值/ 平均值误差
(4) 计算晶振充电时的坡度 : V OSC = d ( V OSC) / TON = 2/ 12. 3 = 0. 17V/μs ;
(5) 计算斜坡补偿值 ,补偿比例 M 取 0. 75 , R1 = 1kΩ,计算 R2 的值 。
根据式 (2) 得 :
R2
=
R1
V OSC V m2 M
= 3. 8kΩ
图 15 采用射极跟随器减小晶振的输出阻抗
4. 2 参数选择
采用单端正激电路设计的 1000W 通信电源 ,以
UC3846 作为控制芯片 ,交流输入 165~275V ;输出
50V 、20A ; 工作频率 80k Hz ; 匝比 8/ 1 ( N P/ N S) ,检 测电阻 R SENSE = 0. 4Ω;输出电感 L = 40μH ;晶振电 容 CT = lnF ;死区时间 0. 145μs 。
入斜坡补偿有两种方法 , 一种是将斜坡补偿信号加 到电流检测信号中 , 如图 13 所示 ; 另一种是将斜坡 补偿信号从误差电压信号中减去 ,如图 14 所示 。
图 10 斜坡补偿电路
图 13 直接将斜坡补偿加到电流检测信号
图 11 简化的斜坡补偿电路
斜坡补偿设计步骤 : ①计算电感电流的下降沿 : m 2 = d i/ d t = V OU T/ L (安/ 秒) ; ②计算反应到初级 的电感电流下降沿 : m 2 = m 2/ N ( N 为高频变压器 的匝比) ; ③计算初级测得的下降沿坡度 : V m2 = m 2 ·R SENSE ( 伏/ 秒) ; ④计算晶振充电时的坡度 : V OSC
2 斜坡补偿的原理[2 ,4 ]
电流模式控制分为峰值电流模式控制和平均电 流模式控制 。UC3846 采用的是峰值电流控制法 , 即将实际的电感电流和电压外环设定的电流值分别 接到 PWM 比较器的两端进行比较 ,如图 1 所示 。
坡补偿 。
211 电路的稳定性 图 2 、图 3 分别是占空比大于 50 %和小于 50 %
(2)
式中 M 补偿比例
M 应大于 0. 5 ,一般取 0. 75~1 。
4 UC3846 的斜坡补偿电路设计
针对峰值电流控制芯片 UC3846 ,进行了斜坡
补偿电路设计 。主电路拓扑采用双管正激电路 。
4. 1 UC3846 的斜坡补偿选择电路 根据图 1 峰值电流控制的电路图可以看到 , 加
(3)
(6) 根据式 (1) ,斜坡补偿后加到芯片电流输入
端的电压坡度 V RAMP = 0. 08V/μs 。
4. 3 实验结果
扰动时电路的输出电压波形和开关管两端的波
图 17 开关管两端电压波形
3
m 1 = 0) ,稳定时必须满足 -
m + m2 m + m1
< 1 ,即补偿
斜率必须满足 m > - 0. 5 m 2 。通常选择补偿坡度
为电感电流下降沿的斜率 m 2 , 这样扰动信号在一
个周期内就完成了校正 ,如图 5 所示 。
另外图 7 所示的电感电流平均值和峰值间也存 在差值 ,在 BUC K 电路中由于电感电流的纹波相对 电感电流的平均值很小 , 并且存在电压外环的校正 作用 ,所以峰值和平均值的这种误差可以忽略 ; 在 BOOST 电路中 ,峰值要跟随输入电网的正弦波 , 所 以和平均值间的误差很大 。这种误差最大 , 需要一 个大电感来使电感电流的纹波变小 , 减小抗干扰能 力 。这也是在 BOOST 中采用平均值电流模式的原 因。
电流模式控制的实质是使平均电感电流跟随误 差电压 V e 设定的值 , 即可用一个恒流源来代替电 感 ,使整个系统由二阶降为一阶 。但如图 6 所示 ,尖 峰电流控制模式中随着占空比 D1 、D2 的不同 ,电感 电流的平均值 I1 、I2 亦不同 。如图 7 示 , 可以通过 斜坡补偿来获得不同占空比下一致的电感电流 。
( Guangz hou U niversity , Guangz hou 510045 , Chi na) Abstract :The article discusses t he function of slop compensation in t he peak current control and t he met hods to com2 plete t he function. At last t he slop compensation in t he forward circuit is designed and accomplished. Keywords : compensation ; peak current control ; slop compensation
图 9 等效电感电流 、电流误差和周期 T 的关系曲线
3 斜坡补偿电路设计步骤[3 ,5]
图 10 示出斜坡补偿电路 。R1 和 R2 组成了从 晶振的输出到限流引脚 ( 脚 1) 的分压网络 , 迭加斜 坡补偿信号到初级的电流波形 , R1 、R2 值的比例决 定了所加的斜坡补偿量 。电容 C1 是交流耦合电容 , 使晶振的交流分量耦合到 R2 , 去掉了直流偏置部 分 。C2 和 R1 组成滤波电路 , 滤去初级 Ip 中的前沿 尖峰 , 避免误动作 。ΔV OSC是晶振锯齿波的峰 2峰 值 。将电容去掉得到图 11 简化电路 。
1 概 述
开关功率电路的电路拓扑分为电流模式控制和 电压模式控制 ,电流模式控制因动态反应快 、补偿电 路简化 、增益带宽大 、输出电感小 、易于均流等优点 而被广泛应用 。电流模式控制又分为峰值电流控制 和平均电流控制 。本文针对峰值电流控制中最重要 的一个问题 ———斜坡补偿[1 ] ,进行了讨论 。斜坡补 偿能增加电路稳定性 、使电感电流平均值不随占空 比变化 ,并减小峰值和平均值的误差 ,斜坡补偿还能 抑制次谐波振荡和振铃电感电流 。文中还讨论了斜 坡补偿的设计方法 ,最后设计了 UC3846 作控制芯 片的双管正激电路中的斜坡补偿电路 。
图 14 将斜坡补偿加到电压检测信号上
前一种实现方法简单 , 但由于斜坡补偿信号的 加入 ,有可能在实现电流限制功能时产生误差 。第
37
第 35 卷第 2001 年 6
3期 月
电力电子技术 Power Electronics
Vol. 35 , No. J une ,2001
关键词 :补偿 ;峰值电流控制 ;斜坡补偿 中图分类号 : TN710 文献标识码 :A 文章编号 :1000 - 100X(2001) 03 - 0035 - 04
Slop Compensation Circuit Design in the Peak Current Control
YAN G Ru
图 8 次谐波振荡时的电感电流波形
2. 4 振铃电感电流 每个周期的电感电流误差关系如下 :
ΔIn = - ΔIn- 1
m + m2 m + m1
由此可以绘出每个周期等效电感电流的瞬时值 、电
感电流误差和周期 T 的关系曲线如图 9 所示 。 由图 9 可以看出 , 电感电流是一个按二分之一
开关频率衰减的正弦波 , 类似于一个 RL C 响应电 路 。这种电流有两个不利之处 : ①电感电流对电源
图 12 斜坡补偿等效电路
斜坡补偿后加到芯片电流输入端的电压为 :
V RAMP
=
V m2 R 2 R1 + R2
+
V OSC R 1 R1 + R2
(1)
(6) 计算斜坡补偿值 :
斜坡补偿电压 V COMP为 :
V COMP
=
V OSC R 1 R1 + R2
=
M
V m2 R 2 R1 + R2
图 6 尖峰电流控制模式中不带斜坡补偿的 平均电流和尖峰电流波形图
36
图 7 尖峰电流控制模式中带斜坡补偿的 平均电流和尖峰电流波形图
2. 3 抑制次谐波振荡 内部电流环的增益尖峰是电流模式控制的一个
重要问题 。这种增益尖峰发生在二分之一开关频率 处 ,使相移超出范围 , 导致不稳定 , 并使电压环进入 次谐波振荡 。这时在连续固定的驱动脉冲下 , 输出 占空比却在变化 , 如图 8 所示 。采用斜坡被偿也能 很好地抑制次谐波振荡 。
峰值电流控制模式中斜坡补偿电路的设计
或负载的瞬态变化产生振铃响应 ; ②在开关频率附 近控制环路增益达到最高 , 从而产生不稳定趋向 。 通过斜坡补偿可以抑制这种振铃电感电流 , 例如当 补偿坡度为电感电流下降沿的斜率时 ( 即 m = m 2) ,振铃电流在一个周期内就完全得到了抑制 。
= d ( V OSC) / TON (伏/ 秒) ⑤应用叠加定理求斜坡补 偿后电流输入端电压 。
计算步骤 :
(1) 计算电感电流的下降沿 : m 2 = V OU T/ L = 50V/ 40μH = 1. 25A/μs ;
(2) 计算反应到初级的电感电流下降沿 : m′2 = m 2/ N = 1. 25/ 8 = 0. 156A/μs ;
(3) 计算初级测得的下降沿坡度 : V m2 = m′2 · R SENSE = 0. 156 ×0. 4 = 0. 06V/μs;