激光雷达主要参数.
三维激光雷达参数-定义说明解析
三维激光雷达参数-概述说明以及解释1.引言1.1 概述概述:三维激光雷达(3D LiDAR)是一种高精度、实时性强的传感器,用于测量物体与其周围环境之间的距离和位置关系。
它通过发射激光束,接收并分析返回的反射信号,从而获取三维空间中物体的准确位置和形状信息。
与传统的二维激光雷达相比,三维激光雷达能够提供更加详细和全面的环境感知,为自动驾驶、机器人导航以及城市规划等领域提供了强大的支持和应用前景。
三维激光雷达的参数是描述其性能和功能的重要指标,包括测距范围、角度分辨率、垂直分辨率、数据输出速率、扫描速度等。
测距范围是指激光雷达可以探测到物体的最远距离,决定了其适用于不同场景的能力。
角度分辨率和垂直分辨率则决定了激光束扫描的细腻程度和对小型物体的检测能力。
数据输出速率和扫描速度决定了激光雷达能够以多快的速度获取并处理环境信息。
三维激光雷达的应用领域广泛。
在自动驾驶领域,它可以实现高精度的地图构建、物体检测与跟踪以及障碍物避让等功能,为自动驾驶车辆提供实时的环境感知。
在机器人导航领域,它可以帮助机器人识别和定位物体,规划和执行路径,实现精确的操作和导航能力。
在城市规划和环境监测领域,它可以提供高精度的地图和物体分布信息,为城市规划和环境监测提供科学依据和参考。
未来,三维激光雷达技术将不断发展和完善。
随着自动驾驶和智能交通的兴起,对激光雷达的性能提出了更高的要求,包括更远的测距范围、更高的角度和垂直分辨率、更快的数据输出速率和扫描速度等。
同时,对于成本和功耗的要求也在不断提高。
因此,未来的三维激光雷达技术将更加注重性能的平衡和综合考量,以满足各个领域的需求。
总之,三维激光雷达作为一种重要的环境感知传感器,具有广泛的应用前景和发展潜力。
通过不断优化和创新,三维激光雷达将在自动驾驶、机器人导航和城市规划等领域发挥越来越重要的作用,为人们创造更加安全、智能和便利的生活环境。
文章结构部分的内容可以如下所示:1.2 文章结构本文主要分为三个主要部分:引言、正文和结论。
(完整版)无人机激光雷达扫描系统

(完整版)无人机激光雷达扫描系统Li-Air无人机激光雷达扫描系统可以实时、动态、大量采集空间点云信息。
根据用户不同应用需求可以选择多旋翼无人机、无人直升机和固定翼无人机平台,可快速获取高密度、高精度的激光雷达点云数据。
硬件设备Li-Air无人机激光雷达系统可搭载多种类型扫描仪,包括Riegl,Optech,MDL,无人机激光雷达扫描系统设备参数见表格1:三维激光雷达扫描仪长距扫描仪中距扫描仪短距扫描仪扫描距离920m500m70m扫描精度1cm15cm2cm飞行速度20-60km/h20-60km/h20-60km/h扫描角度330°360°360°每秒发射激光点数50万3.6万70万扫描仪重量3.85kg4.65kg1kg配备我公司自主研发的Li-Air数据处理系统设备检校Velodyne等,同时集成GPSIMU和自主研发的控制平台。
图1扫描仪、GPS、IMU、控制平台图2八旋翼无人机激光雷达系统图3固定翼无人机激光雷达系统公司提供完善的设备检较系统,在设备使用过程中,定期对系统的各个组件进行重新标定,以保证所采集数据的精度。
图1扫描仪检校前(左)扫描仪检校后(中)检校前后叠加图(右)图4(左)为检校前扫描线:不连续且有异常抖动;图4(中)为检校后扫描线:数据连续且平滑变化;图4(右)为检校前后叠加图,红线标记的部分检校效果对比明显图5(左)为检校前扫描线:不在同一平面;图4(中)为检校后扫描线:在同一平面;图4(右)为检校前后叠加图。
成熟的飞控团队公司拥有成熟的软硬件团队以及经验丰富的飞控手,保证数据质量以及设备的安全性,大大节约了外业成本和时间图6无人机激光雷达系统以及影像系统完善的数据预处理软件公司自主研发的无人机系统配备有成套的激光雷达数据预处理软件Li-Air,该软件可对无人机实时传回的激光雷达数据进行航迹解算、数据生成、可视化等。
图7Li-Air数据预处理功能成功案例2022年7月,本公司利用Li-Air无人机激光雷达扫描系统进行中关村软件园园区扫描项目,采集园区高清点云以及影像数据。
维萨拉 WindCube Nacelle 机舱式激光雷达产品说明书

优点实现快速、成熟、准确的功率曲线测试WindCube Nacelle 可通过持续风向对准功能,实现符合行业实践和 IEC 标准的可靠的合同和运行功率曲线测试,从而快速提供准确数据。
维萨拉气象传感器选件可实现准确的空气密度校正后的功率曲线测试,与此同时,叶轮面等效风速 (REWS) 激光雷达输出数据可提供准确的叶轮面平均风速。
WindCube Nacelle 现在常常被引入风机供应协议,用以检测功率曲线是否达到合同约定的标准。
准确度值得信赖该系统可在 20 个测量距离同时捕获风数据,利用脉冲激光雷达技术在所有测量范围内保持同样的准确度,从而提供稳定、可靠的数据。
还可利用 IEC 测风塔数据进行第三方标定,进而减少功率曲线测试的不确定度。
专注重要问题WindCube Nacelle 可兼容多种类型的风机,安装选项多样,安装过程简单,组件轻巧,具备成熟的集成功能,适用于多种风机类型。
并且配置过程直观,可确保在风电场上快速实现其价值。
用户可通过简单安全的方式管理设备WindCube Nacelle 附带 WindCube Insights — Fleet 软件,是一款易于使用、安全且基于云的工具,同时适用于 WindCube 垂直风廓线激光雷达和 WindCube Nacelle 机舱式激光雷达, 可在单个系统中或跨多个系统实现对激 光雷达的配置、远程监测和数据访问。
性能可靠且使用寿命长WindCube Nacelle 在现场应用表现良好,可靠性高,享受2年保修期,并能够在 9 年的运行时间内将运营支出 (OPEX) 降低 35%。
系统的在线诊断、自动报警和错误编码功能可确保快速进行故障排除和维修。
WindCube ® Nacelle 激光雷达的可靠性和准确度较高,符合 IEC 标准对功率曲线测试 (PPT) 的要求。
借助其可靠的数据和易用性(适用于陆上和海上),有助于提高您的风电场发电量和项目盈利能力。
LiDAR(雷达)技术介绍
是指散射光强遵循朗伯余弦定律的表面,确切地说,从材料表面任何给定方向上反射的光强(单位立体角通量)正比于该方向与表面法线之间夹角的余弦
根据激光雷达截面积大小,分为点目标、大目标、扩展目标
气溶胶和空间散射物
光学散射效应:拉曼散射、米散射、瑞利散射
雷达截面积与激光束穿透溶胶的传输损耗密切相关
5.成像扫描技术
雷达返回一圈的时间
纵向分辨率和水平分辨率
对算法影响大,精度越高价值越贵,满足应用的情况下,选性价比高的
测距精度
厘米级已经满足无人驾驶的应用场景
激光雷达分类:
关键技术
激光雷达融合激光、大气光学、雷达、光机电一体化和信号处理等诸多领域技术,下面逐一介绍各关键技术
1.激光器技术
激光器是激光雷达的核心
激光器种类很多,性能各异,需要综合考虑各种因素后加以选择
难题:相同表面特性的物体假设为漫反射其反光功率也随着距离的平方而线性衰减,如何保证同一类物体点云中呈现的Intensity保持一致?
Intensity校准技术
探测距离增加导致的误差具体来源于两个方面
返回至激光雷达的反射光功率随着距离的平方而线性衰减
返回至激光雷达的反射光经接收透镜成像在单点探测器的位置和距离有关
使用探测器阵列探测返回信号
优点
无扫描器件,成像速度快
集成度高,体积小
芯片级工艺,适合量产
缺点
激光功率受限,探测距离近
抗干扰能力差
角分辨率低
无法实现360°成像
6.信号处理技术
接收信号噪声种类
目标信号:由于目标反射在像平面上行成的信号(weak single)。
大气后向散射信号:激光冒充在照射一定厚度传播介质时所有其的向后散射干扰信号。
激光雷达核心参数

激光雷达核心参数激光雷达是一种通过激光束来测量周围环境的传感器,广泛应用于自动驾驶、机器人、无人机等领域。
激光雷达的核心参数对其性能和应用有着重要影响,本文将对激光雷达的核心参数进行详细介绍。
一、测距精度测距精度是衡量激光雷达性能的重要指标之一,通常表示为距离误差。
它受到多种因素的影响,包括激光功率、接收器灵敏度、噪声等。
在实际应用中,测距精度需要根据具体需求进行选择。
二、角分辨率角分辨率是指激光雷达可以探测到的最小角度。
它与激光束发射和接收系统的设计有关,通常越小越好。
角分辨率决定了激光雷达可以检测到多少个目标,并且对于高速移动目标的检测也非常重要。
三、扫描频率扫描频率是指每秒钟扫描次数,也称为帧率。
它直接影响了激光雷达的实时性能。
通常情况下,扫描频率越高,激光雷达可以检测到更多的目标,并且对于高速移动目标的检测也更加精确。
四、视场角视场角是指激光雷达可以覆盖的水平和垂直角度范围。
它决定了激光雷达可以检测到多少个目标,并且对于环境建模和路径规划也非常重要。
视场角通常由激光束发射和接收系统的设计决定。
五、工作距离工作距离是指激光雷达可以探测到目标的最远距离。
它受到多种因素的影响,包括激光功率、接收器灵敏度、大气衰减等。
在实际应用中,工作距离需要根据具体需求进行选择。
六、数据输出方式数据输出方式是指激光雷达输出数据的格式和接口类型。
常见的数据格式包括点云、图像等,常见的接口类型包括以太网、CAN总线等。
数据输出方式对于不同应用场景有着不同要求,因此需要根据具体需求进行选择。
七、价格价格是衡量激光雷达性价比的重要指标之一。
激光雷达的价格通常受到多种因素的影响,包括性能、品牌、市场需求等。
在实际应用中,需要根据具体需求和预算进行选择。
总结:综上所述,激光雷达的核心参数对其性能和应用有着重要影响。
测距精度、角分辨率、扫描频率、视场角、工作距离和数据输出方式是衡量激光雷达性能的关键指标,需要根据具体需求进行选择。
国产激光雷达性能参数

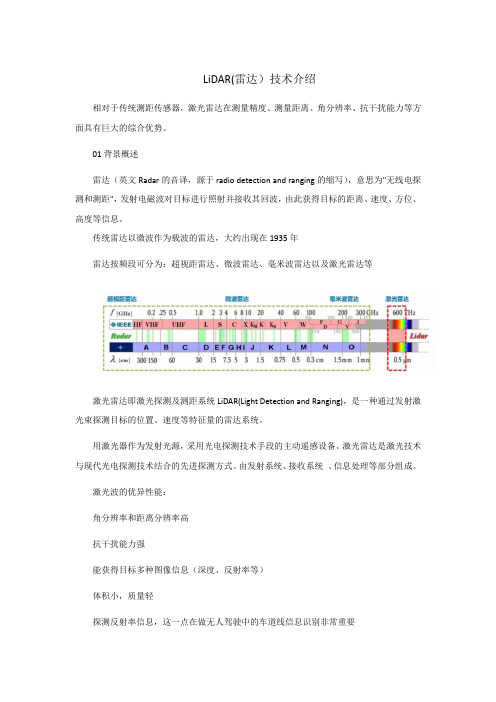
国产激光雷达性能参数 The manuscript was revised on the evening of 2021激光雷达最早的定义是 LIDAR,英文为 Light Deteation and Ranging,中文意思是「光的探测和测距」。
其实更准确的一个定义是 LADAR:LAser Detection and Ranging,即「激光的探测和测距」。
这是在 2004 年提出的定义,更符合激光雷达的概念。
激光雷达实际上是一种工作在光学波段(特殊波段)的雷达,它的优点非常明显:1、具有极高的分辨率:激光雷达工作于光学波段,频率比微波高2~3个数量级以上,因此,与微波雷达相比,激光雷达具有极高的距离分辨率、角分辨率和速度分辨率;2、抗干扰能力强:激光波长短,可发射发散角非常小(μrad量级)的激光束,多路径效应小(不会形成定向发射,与微波或者毫米波产生多路径效应),可探测低空/超低空目标;3、获取的信息量丰富:可直接获取目标的距离、角度、反射强度、速度等信息,生成目标多维度图像;4、可全天时工作:激光主动探测,不依赖于外界光照条件或目标本身的辐射特性。
它只需发射自己的激光束,通过探测发射激光束的回波信号来获取目标信息。
但是激光雷达最大的缺点——容易受到大气条件以及工作环境的烟尘的影响,要实现全天候的工作环境是非常困难的事情。
激光雷达在无人驾驶中的功能:第一是路沿检测,也包括车道线检测;第二是障碍物识别,对静态物体和动态物体的识别;第三是定位以及地图的创建。
一款好的激光雷达设备都有哪些评判标准呢?“单位时间出点数、点云测量精度、测距范围三方面的具体性能直接决定了激光雷达设备品质的好坏”。
激光雷达详细的参数如下:线束………… 16线波长………… 905nm激光等级………… class 1精度…………±2cm(典型值)测距………… 20cm~150m(目标反射率40%)出点数………… 320,000pts/s垂直测角………… 30°垂直角分辨率………… o水平测角………… 360o水平角分辨率………… o至o转速………… 300-1200rpm (5-20Hz)输入电压………… 9-32VDC产品功率………… 9w(典型值)防护安全级别………… IP67操作温度………… -10~60°C规格………… H:*φ:109mm重量………… (不包含数据线)采集数据…………三维空间坐标/反射率激光雷达生产复杂,价格高昂也是行业普遍面对的问题通过深圳在高端制造商的积累解决这个问题。
基于激光雷达技术的粉尘污染源监测

基于激光雷达技术的粉尘污染源监测吕阳;李正强;谢剑锋;张丰;刘小强;刘诏;谢一凇;许华;陈兴峰【摘要】针对粉尘污染点源数量多、夜间偷排偷放监测难等问题,环保监测迫切需要发展新一代遥感监测技术,为环境保护提供技术支撑.激光雷达具有远距离、全天时监测的优势,可实现对污染源的客观、全天时监测.为了验证激光雷达主动遥感技术监测粉尘污染源排放的可行性,在河北省组织了一次粉尘污染源的Lidar监测实验,在进行距离校正的基础上,发展了Lidar点源污染监测指数因子方法.结果表明:烟尘排放浓度与Lidar指数因子具有较好的一致性,校正决定系数可达0.94.在稳定排污的情况下研究Lidar指数因子的限值,结果显示,将指数因子的限值设为2.3时,与在线监测的一致性可以达到99%以上.%To address the large number of point pollution sources and shortage of night monitoring means,there is a pressing need to provide remote sensing monitoring technology supporting for environment protection.With the advantage of long range detection and the capability of working at all time,lidar can provide an objective,continuous and real-time monitoring for a point pollution source.An excess emission experiment was carried out in Hebei province to confirm the feasibility of lidar using in point pollution source monitoring.A lidar index factor method was submitted based on the distance correction.And result showed that there was a positive relationship between the dust emission concentration measured by on-line monitoring instrument and lidar index factor (r=0.94).Furthermore,with the threshold of 2.3,the detection accuracy up to 99% was achieved using lidar index factor under a stable pollution emission.【期刊名称】《中国环境监测》【年(卷),期】2018(034)002【总页数】7页(P130-136)【关键词】激光雷达;粉尘排放;点污染源【作者】吕阳;李正强;谢剑锋;张丰;刘小强;刘诏;谢一凇;许华;陈兴峰【作者单位】中国科学院遥感与数字地球研究所国家环境保护卫星遥感重点实验室,北京100101;中国科学院大学,北京100049;中国科学院遥感与数字地球研究所国家环境保护卫星遥感重点实验室,北京100101;河北省环境监测中心站,河北石家庄050000;河北省环境监测中心站,河北石家庄050000;河北省环境监测中心站,河北石家庄050000;中国科学院遥感与数字地球研究所国家环境保护卫星遥感重点实验室,北京100101;中国科学院大学,北京100049;中国科学院遥感与数字地球研究所国家环境保护卫星遥感重点实验室,北京100101;中国科学院遥感与数字地球研究所国家环境保护卫星遥感重点实验室,北京100101;中国科学院遥感与数字地球研究所国家环境保护卫星遥感重点实验室,北京100101【正文语种】中文【中图分类】X87随着经济快速发展,城市规模不断扩大,大气污染已经严重影响了人们的生产生活[1-2];虽然大部分排污企业已按要求安装了污染排放在线监测仪器来采集烟气流速、浓度及硫化物和氮化物等含量信息。
一文带你了解激光雷达重要指标及参数

激光雷达行业非常广阔,每个细分方向都可以大有所为。
就单线激光雷达而言,致力于解决好机器人的自主定位导航能力,能突破的道路只有一条:以实用性和可靠性作为第一考虑,而非一味的去追求参数。
那么作为一款供定位导航使用的激光雷达,到底什么才是衡量它实用和可靠的指标?测距范围?采样率?精度?只是水面上的冰山一角!作为主要用途是距离测量的激光雷达,其测量的最大距离(量程)自然是其最核心的指标。
大部分激光雷达都会直接以测量距离作为其主要指标。
不过除了测距范围外,相信你也了解下面这些指标数据:较高的扫描频率可以确保安装激光雷达的机器人实现较快速度的运动,并且保证地图构建的质量。
但要提高扫描频率并不只是简单的加速激光雷达内部扫描电机旋转这么简单,对应的需要提高测距采样率。
否则当采样频率固定的情况下,更快的扫描速度只会降低角分辨率。
除了测距距离、扫描频率之外,测量分辨率和精度对于激光雷达性能来说同样重要,并且对于三角测距激光雷达而言,也更具有挑战。
由于测量原理的关系,虽然一般在10米以内都可以实现很高的测距分辨率,但其分辨率亦会随着探测物体距离增加而剧烈下降。
因此,为了实现更远距离的探测,就不只是增加激光器功率这么简单了,需要对于测距核心有本质的改良。
同时为了可靠量产,也需要做很多的配套工作。
上面列举的这些性能指标都是大家所知道的,自然也是激光雷达厂家长久以来一直在不断追求和突破的。
不过,这个并不是说要盲目的追求这些指标的提高,而是要像前面所说,要更加看重整体产品的实用和可靠性,更好的参数不一定能带来更好的产品,可能还会带来其他方面的缺失。
所以现在,我们来聊聊你可能不熟悉的激光雷达的一面,也是在选择激光雷达产品时所需要注重考虑的因素。
水下的冰山-日光抗击能力和深色物体检出率除了上述测距距离、采样率、精度等大家都熟知的性能指标外,在雷达实际使用中还有两个非常重要但往往不太被大家了解的性能指标:深色物体检出率环境光抗干扰能力在实际工作中,很多应用环境中的物体大多不是白色墙面,而是深色的,如家具,暗色的墙纸。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
运行温 度
存储温 度
干节点/RS485 Class 1( eye safe)
905nm -25℃~+50℃ -35℃~+70℃
激光周界系统共有A、B、C3个产品系列 - LFS A系列产品没有内置摄像机,提供50米、70米、120
米,180米4种配置。可指挥控制第三方PTZ摄像机跟踪目标 - LFS B系列产品内置1个或多个固定角度的摄像机,提供30
米、50米、70米,120米、5种配置 - LFS C系列产品为低成本系列产品,内置1台或2台固定角度
摄像机,并包含了一个遮阳/防雨罩,提供30米、50米2种 配置
参数 A-50 A- A- A70 120 180
最大识 别距离 (人体
50米 70 120 180 米米 米
B-30
30米
B- B- B50 70 120
50 70 120 米米 米
反射比 >30%)
最大识
110 130
110
别距离
米米
米
(爬
行)
最大识 别距离 (10% 反射 比)
30米 35 85米 85米 米
安装高 0~25米 度
红外灯
无
CCD敏 感度 (LED 开/关)
内置摄 像机数 量
视频输 出
不适用 无 无
4.5Hz 6.5Hz 垂直/水平 平行/垂直
0~50 0~7米 米
0~20米
24LED
无
±60°
0.01LUX/0LU
0.01LUX
1
234
1V p-p @75欧姆
数据输 出接口
激光安 全等级
25米
30 35 85米 米米
光束发 散度
2mR(0.125度)
最大扫 描扇区
105度
光束倾 0/2/4/6
0度0/Biblioteka /4/6度0度斜角
度
同时跟
16
踪目标
数量
最小室 外识别 时间
480~500毫秒
自过滤
是
规律性
运动物
体
(树、 灌木丛 等)
扫描频 率
脉冲重 复频率
安装方 式
相对扫 描平面 激光发 散度
激光雷达周界系统 激光周界雷达系统是一个完整的产品系列,根据配置不 同,其所包含的部件也不相同。主要部件包括: - 激光测距仪 - 旋转马达(1.3Hz) - 控制编码主机 - 光学反光装置(4组反光镜) - DSP信号处理单元 激光周界系统在旋转时,激光束会沿着一个扇面移动,反 射回的激光束被接收窗口捕获后,会实时创建一个检测平面, 称之为识别区,激光周界系统每0.2秒会对这个识别区内的任 何一点扫描一次,一旦有入侵目标进入这个区域(跑、走、爬 行),激光周界系统会实时计算目标的距离、方位,通过先进 的识别算法,确认出为可疑目标后,会立刻通过RS485把目标 坐标信息发送回监控中心,并激活内置下相应角度的监视摄像 机进行跟踪。 激光雷达警戒系统扫描扇面为120度,安装方式是根据想 达到的防护效果,可以垂直安装或者水平安装,识别性能上是 完全一样的。还可以集成固定或PTZ摄像机,跟踪入侵目标, 发生入侵时,通过坐席软件对入侵的截图,录像和时间进行储 存,并配合现场的告警灯起到警示作用。 产品参数