水准网平差实例
南方平差易水准网平差实例.
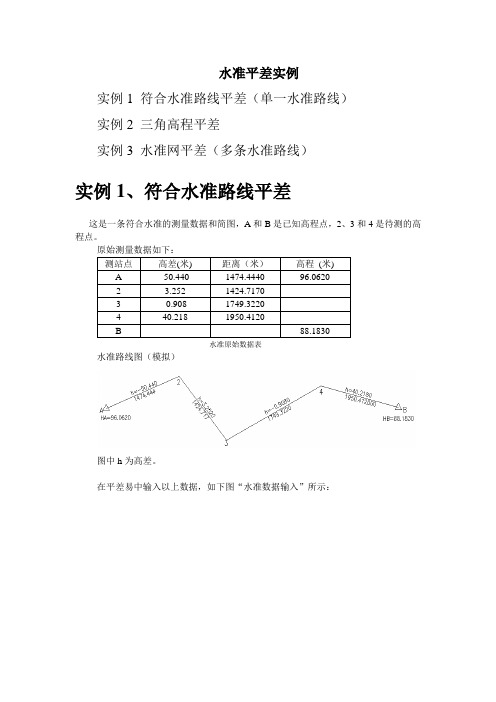
水准平差实例实例1 符合水准路线平差(单一水准路线)实例2 三角高程平差实例3 水准网平差(多条水准路线)实例1、符合水准路线平差这是一条符合水准的测量数据和简图,A和B是已知高程点,2、3和4是待测的高程点。
测站点高差(米) 距离(米)高程(米)A -50.440 1474.4440 96.06202 3.252 1424.71703 -0.908 1749.32204 40.218 1950.4120B 88.1830水准原始数据表水准路线图(模拟)图中h为高差。
在平差易中输入以上数据,如下图“水准数据输入”所示:水准数据输入在测站信息区中输入A、B、2、3和4号测站点,其中A、B为已知高程点,其属性为01,其高程如“水准原始数据表”;2、3、4点为待测高程点,其属性为00,其它信息为空。
因为没有平面坐标数据,故在平差易软件中没有网图显示。
根据控制网的类型选择数据输入格式,此控制网为水准网,选择水准格式,如下图“选择格式”所示:选择格式注意:1、在“计算方案”中要选择“一般水准”,而不是“三角高程”。
“一般水准”所需要输入的观测数据为:观测边长和高差。
“三角高程”所需要输入的观测数据为:观测边长、垂直角、站标高、仪器高。
2、在一般水准的观测数据中输入了测段高差就必须要输入相对应的观测边长,否则平差计算时该测段的权为零,因此导致计算结果错误。
在观测信息区中输入每一组水准观测数据测段A点至2号点的观测数据输入(观测边长为平距)如下图“A->2观测数据”所示:A->2观测数据测段2号点至3号点的观测数据输入如下图“2->3观测数据”所示:2->3观测数据测段3号点至4号点的观测数据输入如下图“3->4观测数据”所示:3->4观测数据测段4号点至B点的观测数据输入如下图“4->B观测数据”所示:4->B观测数据以上数据输入完后,点击菜单“文件\另存为”,将输入的数据保存为平差易数据格式文件(格式内容详见附录A):[STATION]A,01,,,96.062000B,01,,,88.1830002,003,004,00[OBSER]A,2,,1474.444000,-50.44002,3,,1424.717000,3.25203,4,,1749.322000,-0.90804,B,,1950.412000,40.2180平差计算选择菜单“平差->闭合差计算”,计算该水准路线的高差闭合差。
水准网条件平差程序设计毕业论文

本科生毕业设计说明书(毕业论文)题目:水准网条件平差程序设计学生姓名:房新明学号:1072143138专业:测绘工程班级:测绘10-1班指导教师:郭义水准网条件平差程序设计摘要近年来,随着我国经济的快速发展,国家大力于投资各种铁路建设和公路建设,测绘工程的运用也越来越突出。
以水准网布设的高程控制网在各类工程中随处可见。
但观测到的数据存在着各种各样的误差,这就需要我们通过简易平差或严密平差来对数据进行处理,从而使数据能够达到工程的预期精度。
本文主要研究如何解决绘图软件行业标准的网络数据处理问题。
从水准网的结构,平差基本原理、调整模型,基本方程及其解,并对法方程组成,求解,平差值的计算及其精度评定作了介绍。
和Visual studio6.0编程软件的利用,利用C语言是程序设计的相干事情。
在今后的测量工作中,可结合实际平差方案进行平差计算。
关键词:平差模型;精度评定;程序设计Leveling Network Adjustment Program DesignAbstractIn recent years, with China's rapid economic development, the state vigorously investment in all kinds of railway construction and road construction, the use of mapping project is also more and more prominent. In order to control the network level network in various engineering in everywhere. But the observed data exist various error, this needs us through simple adjustment or rigorous adjustment for data processing, so that data to achieve the desired precision engineering.This paper mainly studies how to solve the problem of mapping software industry standard network data processing. From the structure adjustment of leveling network, the basic principle, adjustment model, basic equation and its solution, and the composition of the solution of equations, adjustment calculation and precision evaluation, gross error elimination are introduced as well. And the use of Visual Studio6.0 programming software, using C programming language is related to program design. The measurement work in the future, can be combined with the actual adjustment adjustment calculation.Key words: adjustment model;the accuracy assessment;program design目录摘要 (I)Abstract .......................................................................................................................... I I 第一章绪论 (1)1.1研究背景及意义 (1)1.2国内外研究现状 (2)1.3本文研究的具体内容 (2)第二章条件平差数学模型 (3)2.1条件平差模型 (3)2.1.2测角网条件方程 (6)2.1.3测边网条件方程 (8)2.1.4以坐标为观测值的条件方程 (11)2.2精度评定 (13)2.3条件平差的计算步骤 (17)第三章水准网的设计 (18)3.1水准测量 (18)3.1.1水准网的基本概念 (18)3.2水准网的布设 (19)3.2.1国家水准网的布设 (19)3.2.2水准网的布设要求 (20)第四章C语言介绍 (21)4.1C语言的基本概念 (21)4.2C语言的介绍 (22)4.2.1C语言的特点 (22)第五章程序设计 (24)5.1水准网条件平差和测角网条件平差实例 (24)5.1.1水准网条件平差 (24)5.1.2测角网条件平差 (27)5.2程序代码 (32)参考文献 (57)附录A:外文文献 (58)附录B:中文译文 (70)致谢 (76)第一章绪论1.1研究背景及意义施工测量工作是非常基本的,重要环节。
高程控制网平差

i
i
i
h h V 改厕厕短的改正数, 代入上式,得:
i
i
i
V1 V2 V3 V4 W 0
W H A h1 h2 h3 h4 H B
1.附合水准路线的条件数和条件方程式组成
观测值5个,待定水准点2 个,所以条件有3个,可 以列出3个条件方程:
h1
H B h1 h2 H A 0
V 1 V 3 V 2 W a 0 V 2 V 4 V 6 W b 0 V 4 V 5 V 3 W c 0
(二)观测值权的确定:
1.各水准路线都进行了往返观测,每公里水准路线的观测中误差为 ,
则m:i
R mi2
1 4n
n i
2 i
i
式中,为测往返测高程不符值,以mm为单位;R为测段长度,以km为单位;n
H A h2 h3 h5 H D 0
H B h1 h3 h4 H C 0
一般以1个已知点为起点,其它已知点为终点,所构成的附合 水准路线为已知点数减1,这样可以列出的条件方程式为已知 水准点个数减1.
2.闭合水准路线的条件数和条件方程式的组成
从一个水准点出发,经过若干水准测段,又回到该 水准点,这样的水准路线称为闭合水准路线。
V 1 V 7 V 8 W b 0
V 2 V 8 V 7 W c 0
V 3 V 5 V 8 W d 0
V 4 V 6 V 5 W e 0
2.闭合水准路线的条件数和条件方程式的组 成
图(c)是四边形状水准网,网中有4个待定点,没有已知点, 在平差计算时,只能确定个待定水准点之间的相互关系,如 果确定一个水准点的高程,就可以确定其他点的高程。因此, 该网的必要观测是3个,观测值总数是6个,又3个多余观测, 可以列出3个条件方程。为了让所列立的条件方程式互相独 立,没个条件方程都要求有一个其他方程没有用到的观测值, 即:
水准网按条件平差算例

§ 9.3 水准网按条件平差算例在图(9-5)所示水准网中,A,B两点高程及各观测高差和路线长度列于表(9-1)中。
•.一h s/ I \ :'1 h5 「6A丈' \ 』4\ \ I\ \ x J、\rh2、丿P sJL ___ ■--P2 h7图9-5试求:(1) R、P2及P s点高程之最或然值;(2) P i、F2点间平差后高差的中误差。
解:(1)列条件方程式,不符值以“ mm”为单位。
已知n =7,t =3,故r =7 -3 =4,其条件方程式为w -V2 +V5 +7 =0-V5 -V6 ■ V7 _ 7 = 0 _V3 1V4 ■ V6 - 3 = 0 IV2 ■ V4 -V7 -1 = 0 I(2)列函数式:F = x5 = h5 V5故f5 -1 f^f^f^f^f^f^0(3 )组成法方程式。
1) 令每公里观测高差的权为1,按1/ P i =s,将条件方程系数及其与权倒数之乘积填于表9-2中。
2) 由表9-2数字计算法方程系数,并组成法方程式:表9-2条件方程系数表观测号 abcdsfF s1 111 2-113-1-1-1 4-1151-111 6-110 0 71-1z1-1-11" jg*1观测号%/P%dP %fP %1 1 1112 1-113 2-2-2-24 2-225 11-1116 1-11722-2z1-311(4)法方程式的解算。
1 )解算法方程式在表 9-3中进行。
2) Ipvv 计算之检核。
pvv ] = -Wk I -Wk I-35.467由表9-3中解得Pvvl--35.47,两者完全一致,证明表中解算无误。
(5) 计算观测值改正数及平差值见表 9-4。
(6) 计算R,P 2,P 3点高程最或然值。
H P l= H A X ! =36.359 mH p 2 =H A x 2 =37.012 m-1 0 -14 -1 -2 -15 -2 -2 -2 5_7 -7 —3=0k a k b k cR 36 =H B+X4 =35.360 m5 4A(7) 精度评定。
水准测量平差
169.5
306.0 134.5 245.1
29 长委
68 长委 23 长委 121 安徽省水利厅
1950~1953
1950~1953 1950~1953 1952~1956
0.70
0.56 0.71 0.60
0.12
0.11 0.15 0.09
注:①一、二等水准点间经过连测与网形变化,故该表与表 1—5—1,线路长度不等。 ②1955 年前长江水利委员会简称“长委”,1955 年以后改为长江流域规划办公室简称“长办”。
中国东南部精密水准平差图(安徽省部分)见图 1—7—1。
表 1—7—2
安徽省二等水准观测精度统计表 (1952~1958 年)
水准线 等级
路名称
测
线长
起迄点地名
段
(公里)①
数
施测单位
施测时间 (年)
1 公里线路长观 测中误差(毫米)
偶然 系统
淮上线 Ⅱ 蚌埠~长台关
543.5 193 淮委
1953
江淮线 Ⅱ 寿县~裕溪口
288.7 100 淮委
1953
0.56 0.10
涡河线 Ⅱ 怀远~中牟
453.1 80 淮委
1953
0.43 0.04
宿开线 Ⅱ 符离集~开封
326.5 122 淮委
1953
0.19
0
韩蒙线 Ⅱ 柳泉~蒙城
172.8 36 淮委
1953
0.36 0.15
颍河线 Ⅱ 漯河~沫河口
第四节 水准测量平差
一、1953~1985 年水准测量平差
〔治 淮委 员会 一 、二 等 水准 平差〕 1953 年,淮委利用新、旧观测成果,组成淮河流域 13 个精密水准路线环,14 个二等水 准 路线环,15 条支线,以导淮委员会在淮阴马头镇所设“BM 11,明下”高程 16.967 米 为废 黄河 零 点高 程 。由 于测 图 急需 ,用“淮 上线 ”、“淮 下 线”为 基础 向 两侧 推算 ,未作 平 差。1954 年 12 月,编印出版《淮河流域精密水准测量初算成果表》。1958 年前,安徽水利系统在淮 河流 域 作业 时 ,均 采 用此 成果 ,作为 发 展三 、四等 水 准的 起算 数 据。 〔中 国东 南部 精 密水 准平 差〕 1956 年,总参测绘局、水利部组成 5 人平差委员会,并从全国水利系统中抽调 49 人, 进行中国东南部地区精密水准平差,次年 10 月结束。这次平差,采用 1956 年黄海高程系 统,测区范围在东经 103 度以东至沿海,北纬 22 度~41 度,共 17 个省区。参加平差的水 准路线,共组成 55 个闭合环,长 34949 公里。除总参在河北省及其周围测有 117 公里的一 等水 准 外,其 余均 为 二等(其中 一部 分 为水 利 部门 原测 一 等、平 差按 二等 使 用)。平 差前 ,平 差 委员 会依据 1953 年总 参译印苏 联的《一、二 等水准测 量规范》,参照 1954 年水 利部 的 《精密水准测量细则》,对所有外业成果进行 分析鉴定,认为其中有 8127 公里水准因 操作 不合 要 求,不 能参 加 整体 平差 ,只能 作 局部 平 差。 淮委 与 长(委 )办 ,原测 精 密水 准 ,在 评 定 等级 时 ,大部 分为 二 等,少 数为 三等 ,原 测二 等定 为 三等 。平 差 时,除 按照 正 常情 况对 观 测 资料划分一、二、三、四等以外,又根据部分测段因既违反了操作规程,而在网形结构 上又 无法 舍 弃等 情 况,增 加了“Ⅱ下 等”(成 果表 中 为二 等)。 在参 与 整体 平差 的 水准 网 中,一 等 水 准路线未 形成闭合 环,分散夹 在整个水 准网的 东北角;二等 水准路线 中,夹杂着“Ⅱ 下 等”及三等。平差委员会决定,采用混合网平差法,按不同等级不同精度赋于相应的 路线 权,权 的 确定 采用 正 常公 式计 算 值乘 以 相应 的比 例 因子 ,按水 准等 级 确定 Ⅰ ∶Ⅱ ∶Ⅱ 下 = 2 ∶1 ∶ 0 .8 。 水准 路 线未 进行 重 力测 量 。正 高改 正 计算 ,采用 国际 正 常重 力 公式 。全 区 单 位权中误差=±11.86 毫米;1 公里路线的观测中误差=±1.19 毫米;根据 185 条路线算 出的每公里偶然与系统中误差分别为±0.59 毫米,±0.08 毫米。1957 年 8 月,国家测绘 局出版了《中国东南部精密水准成果表》,安徽省水准点成果载 于第四、第 五册中,中 国东 南部精密水准路线(安徽部分)布测情况见表 1—7—2(二等水准观测精度统计表)。因平 差计算前,一、二等水准点间经过连测与网形变化,所以本表与表 1—5—1 中的长度不等。 ·84·
高程平差方法 举例说明
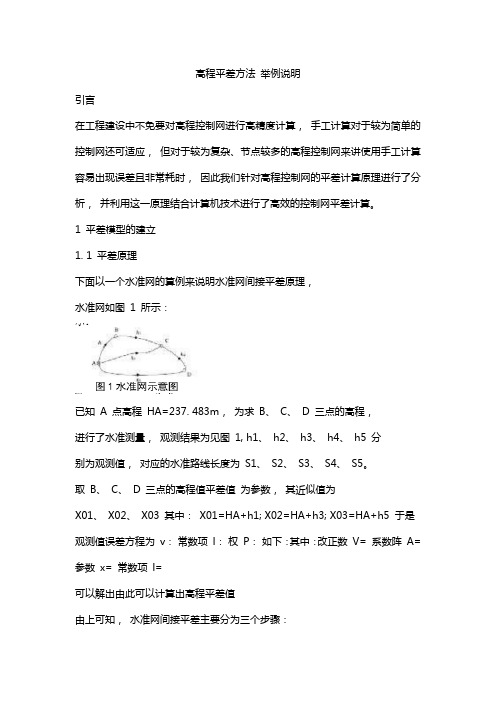
高程平差方法举例说明引言在工程建设中不免要对高程控制网进行高精度计算,手工计算对于较为简单的控制网还可适应,但对于较为复杂、节点较多的高程控制网来讲使用手工计算容易出现误差且非常耗时,因此我们针对高程控制网的平差计算原理进行了分析,并利用这一原理结合计算机技术进行了高效的控制网平差计算。
1 平差模型的建立1. 1 平差原理下面以一个水准网的算例来说明水准网间接平差原理,水准网如图1 所示:已知A 点高程HA=237. 483m,为求B、C、D 三点的高程,进行了水准测量,观测结果为见图1, h1、h2、h3、h4、h5 分别为观测值,对应的水准路线长度为S1、S2、S3、S4、S5。
取B、C、D 三点的高程值平差值为参数,其近似值为X01、X02、X03 其中:X01=HA+h1; X02=HA+h3; X03=HA+h5 于是观测值误差方程为v:常数项l:权P:如下:其中:改正数V= 系数阵A= 参数x= 常数项l=可以解出由此可以计算出高程平差值由上可知,水准网间接平差主要分为三个步骤:(1)高程近似值的计算;(2)列立观测值的误差方程;(3)解误差方程并求高程平差值。
1. 2 常数项矩阵的问题在求近似高程时,同一个未知点的近似高程并不是唯一的一个确定值,它的值随着计算时选择的线路不同而改变,因此得出的常数项矩阵L 也并不是唯一的,在下面的程序计算里面,输入已知数据时线路的排序不同,得出的常数项矩阵L 也不同,当然最后得到的高程改正数也不一样,由于进行平差计算时设的未知数就是未知点高程的近似值,因此在最后得到的未知点的高程平差值跟计算高程近似值时选择的线路无关,只要计算正确,最终得到的高程平差值也是正确的。
这一点可以在使用程序的过程中进行检验,无论线路排序如何改变,只要数据输入正确,得到的结果是一样的。
2 平差程序设计2. 1 关于程序语言的选用考虑到本软件所要解决的问题主要是数据的处理与计算,不涉及到计算机系统底层的操作,因此选用相对简单的Visual Basic 6. 0 来进行程序的编写,使用间接平差模型,在保证计算精度的同时,一来减少了代码编写的难度,二来提高了代码执行的效率。
水准网的条件平差
目录目录 (1)观测误差 (2)摘要: (2)关键词: (2)引言 (3)1水准测量 (4)1.1水准测量的原理 (4)1.2水准网 (5)2条件平差 (6)2.1衡量精度的指标 (6)2.2条件平差的原理 (8)3水准网的平差 (14)3.1必要观测与多余观测 (14)3.2条件方程 (14)3.3条件平差法方程式 (14)3.4条件平差的精度评定 (15)3.5水准网的条件平差 (18)致 (21)参考文献 (21)观测误差—由观测者、外界环境引起的偶然误差学生: xxx 指导教师:xxx摘要:对一系列带有偶然误差的观测值,采用合理的的方法消除它们间的不符值,得出未知量的最可靠值;以及评定测量成果的精度。
关键词:偶然误差;观测值;精度引言测量工作中,要确定地面点的空间位置,就必须进行高程测量,确定地面点的高程。
几何水准测量是高程测量中最基本、最精密的一种方法。
通过测量仪器,工具等任何手段获得的以数字形式表示的空间信息,即观测量。
然而,测量是一个有变化的过程,受仪器、观测值、外界环境因素的影响,观测的结果与客观上存在的一个能反映其真正大小的数值,即真值(理论值),有一定的差异。
可以说在测量中产生误差是不可避免的。
所以,观测值不能准确得到,在测量上称这种差异为观测误差。
根据其对观测结果影响的性质,可将误差分为系统误差和偶然误差两种。
前者可以通过在观测过程中采取一定的措施和在观测结果中加入改正数,消除或减弱它的影响,使其达到忽略不计的程度。
但是,观测结果中,不可避免地包含了后者,它是不可消除的,但可以选择较好的观测条件或采用适当的数据处理方法减弱它。
现在我们要讨论的就是采用适当的数据处理方法来减弱其对水准测量中的影响。
1 水准测量1.1水准测量的原理1.1.1 水准测量的基本原理水准测量是利用水准仪提供的水平视线在水准尺上读数,直接测定店面上两点的高差,然后根据已知点高程及测得的高差来推算待定点的高程。
测绘程序设计—实验八 水准网平差程序设计报告
《测绘程序设计》上机实验报告(Visual C++.Net)班级:测绘0901班学号: 04姓名:代娅琴2012年4月29日实验八平差程序设计基础一、实验目的巩固过程的定义与调用巩固类的创建与使用巩固间接平差模型及平差计算掌握平差程序设计的基本技巧与步骤二、实验内容水准网平差程序设计。
设计一个水准网平差的程序,要求数据从文件中读取,计算部分与界面无关。
1.水准网间接平差模型:2.计算示例:近似高程计算:3.水准网平差计算一般步骤(1)读取观测数据和已知数据;(2)计算未知点高程近似值;(3)列高差观测值误差方程;(4)根据水准路线长度计算高差观测值的权;(5)组成法方程;(6)解法方程,求得未知点高程改正数及平差后高程值;(7)求高差观测值残差及平差后高差观测值;(8)精度评定;(9)输出平差结果。
4.水准网高程近似值计算算法5.输入数据格式示例实验代码:#pragma onceclass LevelControlPoint{public:LevelControlPoint(void);~LevelControlPoint(void);public:CString strName;trName=pstrData[0];m_pKnownPoint[i].strID=pstrData[0];m_pKnownPoint[i].H=_tstof(pstrData[1]);m_pKnownPoint[i].flag=1;trName=pstrData[i];m_pUnknownPoint[i].strID=pstrData[i];m_pUnknownPoint[i].H=0;lag=0;pBackObj=SearchPointUsingID(pstrData[0]);pFrontObj=SearchPointUsingI D(pstrData[1]);ObsValue=_tstof(pstrData[2]);ist=_tstof(pstrData[3]);trID==ID){return &m_pKnownPoint[i];}}return NULL;}trID==ID){return &m_pUnknownPoint[i];}}return NULL;}LevelControlPoint* AdjustLevel::SearchPointUsingID(CString ID){LevelControlPoint* cp;cp=SearchKnownPointUsingID(ID);if(cp==NULL)cp=SearchUnknownPointUsingID(ID);return cp;}void AdjustLevel::ApproHeignt(void)lag!=1){pFrontObj->strID==m_pUnknownPoint[i].strID)&& m_pDhObs[j].cpBackObj->flag==1 ){ =m_pDhObs[i].cpBackObj->H - m_pDhObs[i].ObsValue;*/m_pUnknownPoint[i].H=m_pDhObs[j].cpBackObj->H + m_pDhObs[j].HObsValue;m_pUnknownPoint[i].flag=1;break;}}if(m_pUnknownPoint[i].flag!=1)pBackObj->strID==m_pUnknownPoint[i].strID)&& m_pDhObs[j].cpFrontObj->flag==1 ){ =m_pDhObs[j].cpFrontObj->H-m_pDhObs[j].HObsValue;/* m_pUnknownPoint[i].H=m_pDhObs[i].cpFrontObj->H+m_pDhObs[i].ObsValue;*/ m_pUnknownPoint[i].flag=1;break;}}}}if(i==m_iUnknownPointCount-1)lag!=1)ist);p(i,i)=value;}return p;}void AdjustLevel::FormErrorEquation(CMatrix &B, CMatrix &L){(m_iDhObsCount,m_iUnknownPointCount);(m_iDhObsCount,1);for(int i=0;i<m_iDhObsCount;i++)pBackObj->strID);tmpFront=SearchPointUsingID(m_pDhObs[i].cpFrontObj->strID);trID==tmpBack->strID)trID==tmpFront->strID)bsValue-(m_pDhObs[i].cpBackObj->H-m_pDhObs[i].cpFrontO bj->H);*/L(i,0)=m_pDhObs[i].HObsValue-(m_pDhObs[i].cpFrontObj->H - m_pDhObs[i].cpBackObj->H);(_T("%.3f"),L(i,0));L(i,0)=_tstof(tmp);L(i,0)=L(i,0)*1000;+=x(i,0);xt"));xt"));if()==IDCANCEL) return;CString strFileName=();setlocale(LC_ALL,"");CStdioFile sf;if(!(strFileName, CFile::modeCreate|CFile::modeWrite)) return;(LevleContent);();UpdateData(FALSE);}void CIndircLelveDlg::OnBnClickedComputelevel(){f\r\n"), [i].strID,[i].H);LevleContent+=Temp;}(_T("单位权中误差:%.1f mm\r\n"),r0*1000);LevleContent+=Temp;LevleContent+=_T("未知点高程中误差(mm):\r\n");for(int i=0;i< ;i++){();(_T("%s,%.1f\r\n"),[i].strName,Qx[i]*1000);LevleContent+=Temp;}UpdateData(false);}void CIndircLelveDlg::OnBnClickedSavelevleresult(){xt"));if()==IDCANCEL) return;CString strFileName=();setlocale(LC_ALL,"");CStdioFile sf;if(!(strFileName, CFile::modeCreate|CFile::modeWrite)) return;(LevleContent);();UpdateData(FALSE);}三、实验结果打开文件数据:平差结果:四、实验心得这从实验是我们测绘程序设计的最后一次实验,虽然这个学期我们做了好几次相关的实验,但是我却发现自己学的东西也越来越模糊,感觉很多内容都不理解。