水准网平差报告
水准网平差报告范文

水准网平差报告范文一、引言水准网是工程测量中非常重要的基础设施,用于测量地面高程的变化情况。
水准网平差是对水准测量数据进行处理和分析,得出精确的高程数值。
本报告旨在介绍对水准网进行的平差工作,并总结平差结果的精度和可靠性。
二、平差方法本次水准网平差采用了最小二乘法进行处理。
首先,根据测量数据建立观测方程,然后利用最小二乘法求解误差方程,得出平差结果。
为了提高平差结果的可靠性,还进行了粗差检查和精度评定。
三、数据处理据调查的水准测量数据包括起始点、中间点和终点的高程数值,并附带观测误差。
根据测量原理和方法,建立起始点到中间点,以及中间点到终点的观测方程。
根据最小二乘法原理,得到误差方程,并运用数值计算方法求解平差结果。
四、平差结果经过数据处理,得到了水准网各点的平差值。
其中,起始点高程为100.00m,通过平差计算得到平差值为99.80m;中间点高程为90.00m,通过平差计算得到平差值为89.65m;终点高程为80.00m,通过平差计算得到平差值为79.90m。
平差结果精度评定表明,各点高程平差值的相对精度在0.01m范围内,满足工程要求。
五、精度评定为了验证平差结果的精度和可靠性,对平差后的观测值进行了精度评定。
采用精度评定公式计算出观测值的标准差,并与测量数据中的观测误差进行比较。
结果表明,平差后的观测值标准差与观测误差值基本一致,验证了平差结果的精度和可靠性。
六、结论通过最小二乘法进行水准网平差,得到了高程的精确数值,满足了工程要求。
经过精度评定,验证了平差结果的精度和可靠性。
本报告的平差结果可作为后续工程的高程标准值使用。
七、建议为了进一步提高水准网平差的精度和可靠性,建议在测量过程中增加观测次数,提高数据的质量和准确性。
同时,对于异常数据和粗差要加强检查,在数据处理时予以排除,以减小误差对平差结果的影响。
建议在平差结果中注明精度评定的方法和结果,以提高平差结果的可信度和可靠性。
并提醒在使用平差结果时注意其精度范围,避免误差传递对工程的影响。
水准网条件平差程序设计毕业论文

本科生毕业设计说明书(毕业论文)题目:水准网条件平差程序设计学生姓名:房新明学号:1072143138专业:测绘工程班级:测绘10-1班指导教师:郭义水准网条件平差程序设计摘要近年来,随着我国经济的快速发展,国家大力于投资各种铁路建设和公路建设,测绘工程的运用也越来越突出。
以水准网布设的高程控制网在各类工程中随处可见。
但观测到的数据存在着各种各样的误差,这就需要我们通过简易平差或严密平差来对数据进行处理,从而使数据能够达到工程的预期精度。
本文主要研究如何解决绘图软件行业标准的网络数据处理问题。
从水准网的结构,平差基本原理、调整模型,基本方程及其解,并对法方程组成,求解,平差值的计算及其精度评定作了介绍。
和Visual studio6.0编程软件的利用,利用C语言是程序设计的相干事情。
在今后的测量工作中,可结合实际平差方案进行平差计算。
关键词:平差模型;精度评定;程序设计Leveling Network Adjustment Program DesignAbstractIn recent years, with China's rapid economic development, the state vigorously investment in all kinds of railway construction and road construction, the use of mapping project is also more and more prominent. In order to control the network level network in various engineering in everywhere. But the observed data exist various error, this needs us through simple adjustment or rigorous adjustment for data processing, so that data to achieve the desired precision engineering.This paper mainly studies how to solve the problem of mapping software industry standard network data processing. From the structure adjustment of leveling network, the basic principle, adjustment model, basic equation and its solution, and the composition of the solution of equations, adjustment calculation and precision evaluation, gross error elimination are introduced as well. And the use of Visual Studio6.0 programming software, using C programming language is related to program design. The measurement work in the future, can be combined with the actual adjustment adjustment calculation.Key words: adjustment model;the accuracy assessment;program design目录摘要 (I)Abstract .......................................................................................................................... I I 第一章绪论 (1)1.1研究背景及意义 (1)1.2国内外研究现状 (2)1.3本文研究的具体内容 (2)第二章条件平差数学模型 (3)2.1条件平差模型 (3)2.1.2测角网条件方程 (6)2.1.3测边网条件方程 (8)2.1.4以坐标为观测值的条件方程 (11)2.2精度评定 (13)2.3条件平差的计算步骤 (17)第三章水准网的设计 (18)3.1水准测量 (18)3.1.1水准网的基本概念 (18)3.2水准网的布设 (19)3.2.1国家水准网的布设 (19)3.2.2水准网的布设要求 (20)第四章C语言介绍 (21)4.1C语言的基本概念 (21)4.2C语言的介绍 (22)4.2.1C语言的特点 (22)第五章程序设计 (24)5.1水准网条件平差和测角网条件平差实例 (24)5.1.1水准网条件平差 (24)5.1.2测角网条件平差 (27)5.2程序代码 (32)参考文献 (57)附录A:外文文献 (58)附录B:中文译文 (70)致谢 (76)第一章绪论1.1研究背景及意义施工测量工作是非常基本的,重要环节。
高程控制网平差

i
i
i
h h V 改厕厕短的改正数, 代入上式,得:
i
i
i
V1 V2 V3 V4 W 0
W H A h1 h2 h3 h4 H B
1.附合水准路线的条件数和条件方程式组成
观测值5个,待定水准点2 个,所以条件有3个,可 以列出3个条件方程:
h1
H B h1 h2 H A 0
V 1 V 3 V 2 W a 0 V 2 V 4 V 6 W b 0 V 4 V 5 V 3 W c 0
(二)观测值权的确定:
1.各水准路线都进行了往返观测,每公里水准路线的观测中误差为 ,
则m:i
R mi2
1 4n
n i
2 i
i
式中,为测往返测高程不符值,以mm为单位;R为测段长度,以km为单位;n
H A h2 h3 h5 H D 0
H B h1 h3 h4 H C 0
一般以1个已知点为起点,其它已知点为终点,所构成的附合 水准路线为已知点数减1,这样可以列出的条件方程式为已知 水准点个数减1.
2.闭合水准路线的条件数和条件方程式的组成
从一个水准点出发,经过若干水准测段,又回到该 水准点,这样的水准路线称为闭合水准路线。
V 1 V 7 V 8 W b 0
V 2 V 8 V 7 W c 0
V 3 V 5 V 8 W d 0
V 4 V 6 V 5 W e 0
2.闭合水准路线的条件数和条件方程式的组 成
图(c)是四边形状水准网,网中有4个待定点,没有已知点, 在平差计算时,只能确定个待定水准点之间的相互关系,如 果确定一个水准点的高程,就可以确定其他点的高程。因此, 该网的必要观测是3个,观测值总数是6个,又3个多余观测, 可以列出3个条件方程。为了让所列立的条件方程式互相独 立,没个条件方程都要求有一个其他方程没有用到的观测值, 即:
测绘程序设计实验八水准网平差程序设计报告
测绘程序设计实验八水准网平差程序设计报告Pleasure Group Office【T985AB-B866SYT-B182C-BS682T-STT18】《测绘程序设计》上机实验报告(Visual C++.Net)班级:测绘0901班学号: 04姓名:代娅琴2012年4月29日实验八平差程序设计基础一、实验目的巩固过程的定义与调用巩固类的创建与使用巩固间接平差模型及平差计算掌握平差程序设计的基本技巧与步骤二、实验内容水准网平差程序设计。
设计一个水准网平差的程序,要求数据从文件中读取,计算部分与界面无关。
1.水准网间接平差模型:2.计算示例:近似高程计算:3.水准网平差计算一般步骤(1)读取观测数据和已知数据;(2)计算未知点高程近似值;(3)列高差观测值误差方程;(4)根据水准路线长度计算高差观测值的权;(5)组成法方程;(6)解法方程,求得未知点高程改正数及平差后高程值;(7)求高差观测值残差及平差后高差观测值;(8)精度评定;(9)输出平差结果。
4.水准网高程近似值计算算法5.输入数据格式示例实验代码:#pragma onceclass LevelControlPoint{public:LevelControlPoint(void);~LevelControlPoint(void);public:CString strName;trName=pstrData[0];m_pKnownPoint[i].strID=pstrData[0];m_pKnownPoint[i].H=_tstof(pstrData[1]);m_pKnownPoint[i].flag=1;trName=pstrData[i];m_pUnknownPoint[i].strID=pstrData[i];m_pUnknownPoint[i].H=0;lag=0;pBackObj=SearchPointUsingID(pstrData[0]);pFrontObj=Sear chPointUsingID(pstrData[1]);ObsValue=_tstof(pstrData[2]);ist=_tstof(pstrData[3]);trID==ID) {return &m_pKnownPoint[i];}}return NULL;}trID==ID){return &m_pUnknownPoint[i];}}return NULL;}LevelControlPoint* AdjustLevel::SearchPointUsingID(CString ID){LevelControlPoint* cp;cp=SearchKnownPointUsingID(ID);if(cp==NULL)cp=SearchUnknownPointUsingID(ID);return cp;}void AdjustLevel::ApproHeignt(void)lag!=1){pFrontObj->strID==m_pUnknownPoint[i].strID)&& m_pDhObs[j].cpBackObj->flag==1 ){ =m_pDhObs[i].cpBackObj->H - m_pDhObs[i].ObsValue;*/m_pUnknownPoint[i].H=m_pDhObs[j].cpBackObj->H + m_pDhObs[j].HObsValue;m_pUnknownPoint[i].flag=1;break;}}if(m_pUnknownPoint[i].flag!=1)pBackObj->strID==m_pUnknownPoint[i].strID)&& m_pDhObs[j].cpFrontObj->flag==1 ){ =m_pDhObs[j].cpFrontObj->H-m_pDhObs[j].HObsValue;/* m_pUnknownPoint[i].H=m_pDhObs[i].cpFrontObj->H+m_pDhObs[i].ObsValue;*/m_pUnknownPoint[i].flag=1;break;}}}}if(i==m_iUnknownPointCount-1)lag!=1)ist);p(i,i)=value;}return p;}void AdjustLevel::FormErrorEquation(CMatrix &B, CMatrix &L){(m_iDhObsCount,m_iUnknownPointCount);(m_iDhObsCount,1);for(int i=0;i<m_iDhObsCount;i++)pBackObj->strID);tmpFront=SearchPointUsingID(m_pDhObs[i].cpFrontObj->strID);trID==tmpBack->strID)trID==tmpFront->strID)bsValue-(m_pDhObs[i].cpBackObj->H-m_pDhObs[i].cpFrontObj->H);*/L(i,0)=m_pDhObs[i].HObsValue-(m_pDhObs[i].cpFrontObj->H -m_pDhObs[i].cpBackObj->H);(_T("%.3f"),L(i,0));L(i,0)=_tstof(tmp);L(i,0)=L(i,0)*1000;+=x(i,0);xt"));xt"));if()==IDCANCEL) return;CString strFileName=();setlocale(LC_ALL,"");CStdioFile sf;if(!(strFileName, CFile::modeCreate|CFile::modeWrite)) return;(LevleContent);();UpdateData(FALSE);}void CIndircLelveDlg::OnBnClickedComputelevel(){f\r\n"), [i].strID,[i].H);LevleContent+=Temp;}(_T("单位权中误差:%.1f mm\r\n"),r0*1000);LevleContent+=Temp;LevleContent+=_T("未知点高程中误差(mm):\r\n");for(int i=0;i< ;i++){();(_T("%s,%.1f\r\n"),[i].strName,Qx[i]*1000);LevleContent+=Temp;}UpdateData(false);}void CIndircLelveDlg::OnBnClickedSavelevleresult(){xt"));if()==IDCANCEL) return;CString strFileName=();setlocale(LC_ALL,"");CStdioFile sf;if(!(strFileName, CFile::modeCreate|CFile::modeWrite)) return;(LevleContent);();UpdateData(FALSE);}三、实验结果打开文件数据:平差结果:四、实验心得这从实验是我们测绘程序设计的最后一次实验,虽然这个学期我们做了好几次相关的实验,但是我却发现自己学的东西也越来越模糊,感觉很多内容都不理解。
高程平差方法 举例说明
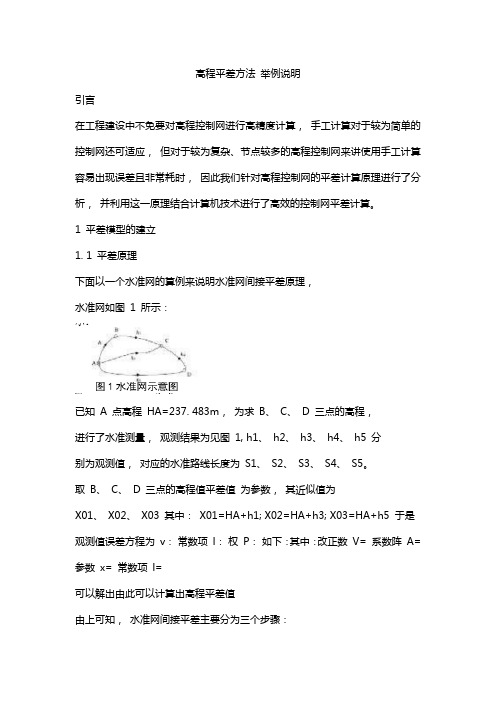
高程平差方法举例说明引言在工程建设中不免要对高程控制网进行高精度计算,手工计算对于较为简单的控制网还可适应,但对于较为复杂、节点较多的高程控制网来讲使用手工计算容易出现误差且非常耗时,因此我们针对高程控制网的平差计算原理进行了分析,并利用这一原理结合计算机技术进行了高效的控制网平差计算。
1 平差模型的建立1. 1 平差原理下面以一个水准网的算例来说明水准网间接平差原理,水准网如图1 所示:已知A 点高程HA=237. 483m,为求B、C、D 三点的高程,进行了水准测量,观测结果为见图1, h1、h2、h3、h4、h5 分别为观测值,对应的水准路线长度为S1、S2、S3、S4、S5。
取B、C、D 三点的高程值平差值为参数,其近似值为X01、X02、X03 其中:X01=HA+h1; X02=HA+h3; X03=HA+h5 于是观测值误差方程为v:常数项l:权P:如下:其中:改正数V= 系数阵A= 参数x= 常数项l=可以解出由此可以计算出高程平差值由上可知,水准网间接平差主要分为三个步骤:(1)高程近似值的计算;(2)列立观测值的误差方程;(3)解误差方程并求高程平差值。
1. 2 常数项矩阵的问题在求近似高程时,同一个未知点的近似高程并不是唯一的一个确定值,它的值随着计算时选择的线路不同而改变,因此得出的常数项矩阵L 也并不是唯一的,在下面的程序计算里面,输入已知数据时线路的排序不同,得出的常数项矩阵L 也不同,当然最后得到的高程改正数也不一样,由于进行平差计算时设的未知数就是未知点高程的近似值,因此在最后得到的未知点的高程平差值跟计算高程近似值时选择的线路无关,只要计算正确,最终得到的高程平差值也是正确的。
这一点可以在使用程序的过程中进行检验,无论线路排序如何改变,只要数据输入正确,得到的结果是一样的。
2 平差程序设计2. 1 关于程序语言的选用考虑到本软件所要解决的问题主要是数据的处理与计算,不涉及到计算机系统底层的操作,因此选用相对简单的Visual Basic 6. 0 来进行程序的编写,使用间接平差模型,在保证计算精度的同时,一来减少了代码编写的难度,二来提高了代码执行的效率。
水准网的条件平差
目录目录 (1)观测误差 (2)摘要: (2)关键词: (2)引言 (3)1水准测量 (4)1.1水准测量的原理 (4)1.2水准网 (5)2条件平差 (6)2.1衡量精度的指标 (6)2.2条件平差的原理 (8)3水准网的平差 (14)3.1必要观测与多余观测 (14)3.2条件方程 (14)3.3条件平差法方程式 (14)3.4条件平差的精度评定 (15)3.5水准网的条件平差 (18)致 (21)参考文献 (21)观测误差—由观测者、外界环境引起的偶然误差学生: xxx 指导教师:xxx摘要:对一系列带有偶然误差的观测值,采用合理的的方法消除它们间的不符值,得出未知量的最可靠值;以及评定测量成果的精度。
关键词:偶然误差;观测值;精度引言测量工作中,要确定地面点的空间位置,就必须进行高程测量,确定地面点的高程。
几何水准测量是高程测量中最基本、最精密的一种方法。
通过测量仪器,工具等任何手段获得的以数字形式表示的空间信息,即观测量。
然而,测量是一个有变化的过程,受仪器、观测值、外界环境因素的影响,观测的结果与客观上存在的一个能反映其真正大小的数值,即真值(理论值),有一定的差异。
可以说在测量中产生误差是不可避免的。
所以,观测值不能准确得到,在测量上称这种差异为观测误差。
根据其对观测结果影响的性质,可将误差分为系统误差和偶然误差两种。
前者可以通过在观测过程中采取一定的措施和在观测结果中加入改正数,消除或减弱它的影响,使其达到忽略不计的程度。
但是,观测结果中,不可避免地包含了后者,它是不可消除的,但可以选择较好的观测条件或采用适当的数据处理方法减弱它。
现在我们要讨论的就是采用适当的数据处理方法来减弱其对水准测量中的影响。
1 水准测量1.1水准测量的原理1.1.1 水准测量的基本原理水准测量是利用水准仪提供的水平视线在水准尺上读数,直接测定店面上两点的高差,然后根据已知点高程及测得的高差来推算待定点的高程。
水准网的条件平差
云南旅游职业学院专科毕业(设计)论文目录目录 (1)观测误差 (2)摘要: (2)关键词: (2)引言 (3)1水准测量 (4)1.1水准测量的原理 (4)1.2水准网 (5)2条件平差 (6)2.1衡量精度的指标 (6)2.2条件平差的原理 (8)3水准网的平差 (13)3.1必要观测与多余观测 (14)3.2条件方程 (14)3.3条件平差法方程式 (14)3.4条件平差的精度评定 (15)3.5水准网的条件平差 (18)致谢 (21)参考文献 (21)1云南旅游职业学院专科毕业(设计)论文观测误差—由观测者、外界环境引起的偶然误差学生: xxx 指导教师:xxx摘要:对一系列带有偶然误差的观测值,采用合理的的方法消除它们间的不符值,得出未知量的最可靠值;以及评定测量成果的精度。
关键词:偶然误差;观测值;精度2云南旅游职业学院专科毕业(设计)论文引言测量工作中,要确定地面点的空间位置,就必须进行高程测量,确定地面点的高程。
几何水准测量是高程测量中最基本、最精密的一种方法。
通过测量仪器,工具等任何手段获得的以数字形式表示的空间信息,即观测量。
然而,测量是一个有变化的过程,受仪器、观测值、外界环境因素的影响,观测的结果与客观上存在的一个能反映其真正大小的数值,即真值(理论值),有一定的差异。
可以说在测量中产生误差是不可避免的。
所以,观测值不能准确得到,在测量上称这种差异为观测误差。
根据其对观测结果影响的性质,可将误差分为系统误差和偶然误差两种。
前者可以通过在观测过程中采取一定的措施和在观测结果中加入改正数,消除或减弱它的影响,使其达到忽略不计的程度。
但是,观测结果中,不可避免地包含了后者,它是不可消除的,但可以选择较好的观测条件或采用适当的数据处理方法减弱它。
现在我们要讨论的就是采用适当的数据处理方法来减弱其对水准测量中的影响。
3云南旅游职业学院专科毕业(设计)论文41 水准测量1.1 水准测量的原理1.1.1 水准测量的基本原理水准测量是利用水准仪提供的水平视线在水准尺上读数,直接测定店面上两点的高差,然后根据已知点高程及测得的高差来推算待定点的高程。
测绘程序设计—实验八 水准网平差程序设计报告
《测绘程序设计》上机实验报告(Visual C++.Net)班级:测绘0901班学号: 04姓名:代娅琴2012年4月29日实验八平差程序设计基础一、实验目的巩固过程的定义与调用巩固类的创建与使用巩固间接平差模型及平差计算掌握平差程序设计的基本技巧与步骤二、实验内容水准网平差程序设计。
设计一个水准网平差的程序,要求数据从文件中读取,计算部分与界面无关。
1.水准网间接平差模型:2.计算示例:近似高程计算:3.水准网平差计算一般步骤(1)读取观测数据和已知数据;(2)计算未知点高程近似值;(3)列高差观测值误差方程;(4)根据水准路线长度计算高差观测值的权;(5)组成法方程;(6)解法方程,求得未知点高程改正数及平差后高程值;(7)求高差观测值残差及平差后高差观测值;(8)精度评定;(9)输出平差结果。
4.水准网高程近似值计算算法5.输入数据格式示例实验代码:#pragma onceclass LevelControlPoint{public:LevelControlPoint(void);~LevelControlPoint(void);public:CString strName;trName=pstrData[0];m_pKnownPoint[i].strID=pstrData[0];m_pKnownPoint[i].H=_tstof(pstrData[1]);m_pKnownPoint[i].flag=1;trName=pstrData[i];m_pUnknownPoint[i].strID=pstrData[i];m_pUnknownPoint[i].H=0;lag=0;pBackObj=SearchPointUsingID(pstrData[0]);pFrontObj=SearchPointUsingI D(pstrData[1]);ObsValue=_tstof(pstrData[2]);ist=_tstof(pstrData[3]);trID==ID){return &m_pKnownPoint[i];}}return NULL;}trID==ID){return &m_pUnknownPoint[i];}}return NULL;}LevelControlPoint* AdjustLevel::SearchPointUsingID(CString ID){LevelControlPoint* cp;cp=SearchKnownPointUsingID(ID);if(cp==NULL)cp=SearchUnknownPointUsingID(ID);return cp;}void AdjustLevel::ApproHeignt(void)lag!=1){pFrontObj->strID==m_pUnknownPoint[i].strID)&& m_pDhObs[j].cpBackObj->flag==1 ){ =m_pDhObs[i].cpBackObj->H - m_pDhObs[i].ObsValue;*/m_pUnknownPoint[i].H=m_pDhObs[j].cpBackObj->H + m_pDhObs[j].HObsValue;m_pUnknownPoint[i].flag=1;break;}}if(m_pUnknownPoint[i].flag!=1)pBackObj->strID==m_pUnknownPoint[i].strID)&& m_pDhObs[j].cpFrontObj->flag==1 ){ =m_pDhObs[j].cpFrontObj->H-m_pDhObs[j].HObsValue;/* m_pUnknownPoint[i].H=m_pDhObs[i].cpFrontObj->H+m_pDhObs[i].ObsValue;*/ m_pUnknownPoint[i].flag=1;break;}}}}if(i==m_iUnknownPointCount-1)lag!=1)ist);p(i,i)=value;}return p;}void AdjustLevel::FormErrorEquation(CMatrix &B, CMatrix &L){(m_iDhObsCount,m_iUnknownPointCount);(m_iDhObsCount,1);for(int i=0;i<m_iDhObsCount;i++)pBackObj->strID);tmpFront=SearchPointUsingID(m_pDhObs[i].cpFrontObj->strID);trID==tmpBack->strID)trID==tmpFront->strID)bsValue-(m_pDhObs[i].cpBackObj->H-m_pDhObs[i].cpFrontO bj->H);*/L(i,0)=m_pDhObs[i].HObsValue-(m_pDhObs[i].cpFrontObj->H - m_pDhObs[i].cpBackObj->H);(_T("%.3f"),L(i,0));L(i,0)=_tstof(tmp);L(i,0)=L(i,0)*1000;+=x(i,0);xt"));xt"));if()==IDCANCEL) return;CString strFileName=();setlocale(LC_ALL,"");CStdioFile sf;if(!(strFileName, CFile::modeCreate|CFile::modeWrite)) return;(LevleContent);();UpdateData(FALSE);}void CIndircLelveDlg::OnBnClickedComputelevel(){f\r\n"), [i].strID,[i].H);LevleContent+=Temp;}(_T("单位权中误差:%.1f mm\r\n"),r0*1000);LevleContent+=Temp;LevleContent+=_T("未知点高程中误差(mm):\r\n");for(int i=0;i< ;i++){();(_T("%s,%.1f\r\n"),[i].strName,Qx[i]*1000);LevleContent+=Temp;}UpdateData(false);}void CIndircLelveDlg::OnBnClickedSavelevleresult(){xt"));if()==IDCANCEL) return;CString strFileName=();setlocale(LC_ALL,"");CStdioFile sf;if(!(strFileName, CFile::modeCreate|CFile::modeWrite)) return;(LevleContent);();UpdateData(FALSE);}三、实验结果打开文件数据:平差结果:四、实验心得这从实验是我们测绘程序设计的最后一次实验,虽然这个学期我们做了好几次相关的实验,但是我却发现自己学的东西也越来越模糊,感觉很多内容都不理解。
水准测量平差
·85·
1—7—1 1957 年中国东南部精密水准平差图(安徽省部分)
·86·
〔长(委)办 二、三 、四等 水准 平 差〕 长(委)办在完成宜昌以下沿江两岸,精密水准测量后进行 7 个水准路线环平差(简称
7 环平差),起算点为镇江 Y .R .C .BM 308’,属吴淞高程系。 中 国东 南 部精 密水 准 平差 后,长(委)办 又在 长 江流 域增 测 新线 ,省境 内 新布 设两 条 二
第二轮全国二等水准网平差,以 1986 年平差的一等水准成果为起算 数据,以一 等水 准路线环为单位,安徽省内及周边地区有 66、33、34、35、38 环参加平差。此项工作由国家 测绘局西安数据处理中心承担,至 1989 年还未结束。
·87·
〔安 徽省 水利 厅 勘测 设计 院 三、四 等水 准 平差〕 1959 年,安徽省水利厅勘测设计院对 前淮委、前水 利厅、长办、总 参测绘 局及本单 位 在省内所测的三、四等水准资料整理分析后,以国家二等水准路线环为单 位,用逐次 趋近 法进行整体平差。全省有 13 个二等环,由北向南依次编号,平差结果载于 1959 年 10 月编 印的《安徽省三、四等水准成果表》中,系 1956 年黄海高程。为了比较和应用方便,表内大 部分 点同 时载 有 1956 年 黄海 高程 和初 算高 程,表内 载有 安徽 省内 三、四等 水 准点 6367 个。 1978 年,该院会同阜阳、宿县地区水利局,整理了 1976 年前,各测量单位在淮北地区 布设的各级水准点,共 3421 个(包括接测水准的三角点),1978 年 6 月,以县为单位,编制 出版《淮 北地 区水 准 成果 表》。表 中绘 有 以县 为单 位 的水 准路 线 图,部 分点 载 有废 黄河 系 统 的高程值。其新、旧高程系统(1956 年黄海高程值减去废黄河高程值)的差值,在+0.100 ~+0.153 米之间,中数为+0.130 米。
控制测量实习报告
控制测量实习报告控制测量实习报告11、测区概况位于玉溪市江川县江城镇,二等水准测量控制点大多布设在公路旁,控制网布设在江城镇附近公路及山地上,二等水准测量控制点大多布设在公路旁,位于公路(翠大线)边上的控制点,地势平坦,在这些点的附近多为房屋和农田,视野比较开阔,通视情况比较好,但是来来往往车辆较多,观测过程中对仪器影响很大,四等导线测量(五等三角高程测量)的控制点大多位于山上,位于山上的控制点,由于有些树长高了,通视情况不是很好,观测的时候找目标不是很好找,大多地方路形崎岖,路面滑,实习过程中,天气太热,对仪器也有很大的影响。
控制点大多是用水泥钉和埋石做标识。
二等水准测量控制点K27位于IJ107与IJ106间去抚仙湖的路旁,IJ107、IJ106、IJ105均在翠大线路,K24附近有一个财神庙,13G和13F旁边有一个水池,14T在一个山包上的一个大石头上,用水泥钉做标石。
四等导线测量(五等三角高程测量)的控制点CH5位于山头上,CH18位于一个山头上小路间,水泥钉做标石,J7位于大路边的山头上的石头上,14A位于上山头上松树旁,M5位于两棵树间,埋石做标石,K22位于一个山包上的石头上,电杆旁,水泥钉做标石,IJ104、IJ105、IJ106、IJ107均位于翠大线旁,水泥钉做标识。
2、组任务(1)到实习基地找到已布设好的控制点;(2)对仪器进行检验与校正,测水准仪的i角误差以及全站仪的水平度盘的2C值和竖直角的指标差;(3)四等导线测量(五等三角高程测量),需测水平角、竖直角、平距,通过数据计算出三角高程及水平角。
(4)二等水准测量,需测出各段高程、视距。
二等水准测量线路:线路2(6):14T(起点)、13F、13G、K24、IJ105、IJ106、IJ107、K27(终点)。
导线网(三角高程网):线路2(6):闭合环4(3):CH5(起点)、CH18、J7、14A、M5、K22、IJ104、IJ105、IJ106、IJ107(终点)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
控制网平差报告[控制网概况]
1、本成果为按[平面]网处理的平差成果
计算软件:南方平差易2002
网名计算日期:日期: 2017-01-06
观测人:
记录人:
计算者:
测量单位:
备注:
2、高程控制网等级:国家三等
每公里高差中误差= (mm)
起始点高程
1309 (m)
1299 (m)
闭合差统计报告
几何条件:闭合水准
路径:[1309-11]
高差闭合差=(mm),限差=(mm)
路线长度=(km)
几何条件:闭合水准
路径:[2-9-10-12-1]
高差闭合差=(mm),限差=(mm)路线长度=(km)
几何条件:闭合水准
路径:[7-8-3-2-9]
高差闭合差=(mm),限差=(mm)路线长度=(km)
几何条件:闭合水准
路径:[5-6-7-8-3-4]
高差闭合差=(mm),限差=(mm)路线长度=(km)
[方向观测成果表]
[高差观测成果表]
[高程平差结果表]
[控制点成果表]。