基于Harris角点和SIFT算法的车辆图像匹配
基于改进的Harris和SIFT算法的眼底图像拼合

0 引 言
眼底 图像丰 富的血 管和纹理 结构 ,对 于 眼底小 疣 、黄
T Ao h-a g Z i n ,HUANG a j i Hu
( c o lo e tia gn eig a d I fr to S h o fElcrc l En ie rn n n omain,Sc u n Unv r i ,C e g u 6 0 6 ,C ia ih a iest y h n d 1 0 5 hn ) Abtat sr c :On tetaio a wa s gt eSF ag r h ,t ecmp tt ni h aywhl wi a cu ay h rdt n l yui I T o tm h o uai ev i t b dac rc.Har g r h sd i n h l i o s e h ri a oi sl t i u e m s
R — d tM )一 是 ta e M ) e( (r c ( ) () 1
1 Har 角点 检测算 法 和 SFF算法简 介 ri s I
1 1 H ri 角点 检 测 算 法 . ar s
特征点 的提取 直接 关系 到图像 配准 的效 果 ,角 点作 为
收 稿 日期 :2 1 —01 ;修 订 日期 :2 1—21 0 11—2 0 11 —6
21 年 9 02 月
计 算机 工程 与设 计
COM P UTER NGI E NEERI NG AND DES GN I
具有SIFT描述的Harris角点多源图像配准

Absr c : u t s n o ’ g e it t n i e y d f c l b c u eo erd fe e ti g n rn i l s Re e rn o t e t a t M l — e s ri i ma er g sr i sv r i u t e a s f h i i r n ma ig p i cp e . f ri g t h ao i t r g sr t n o fa e n ii l ma e , e itai n a g r h i p o o e a e n te Ha s c m e t I T e i a i fi r r d a d v s e i g s a r g s t l o i m s r p s d b s d o h r o rwi S F t o n b r o t i h
作 为特征 点; 然后通过改进 SF IT对特征点 的描述方法 , 采用 圆环 结构 算子对 Har 角点进行 类 SF rs i IT的特征描述 ; 最后利用双向最近邻 方法进行 匹配,通过最小二乘法 实现 图像的配准 。实验证 实了算法配准的精确性 、快速性和
稳 定 性 ,具 有较 好 的 配 准效 果 。
融 合 了 Ha i 与 SF rs IT各 自的优 点 ,本文 实验 证 明其具 有 良好 的 配准效 果 。
1 多 尺 度 H r s 点提 取 ar 角 i
实 际 图像 中的 特征 角 点常 常 出现 在 不 同的尺 度范 围上 ,在较 大尺 度下 能更 可靠地 消 除误检 角点以确 保
基于sift特征的图像匹配算法
21 .特征点方向的确定
利用特征点邻域像素的的梯 度方 向分布特征 ,为每
一
个特征点指定方 向参数 ,使算子具有 尺度不变性 。
mx )√ + y L 一) + , 1 L , l ( = l) ( 1) ) (Y , , 一 x , , +一 x— 0x )o n OyO L , 1/ ( 1)三 一) ) 9 , = 2 , -(y )( x ,一 O 1) ( ) y t t a +  ̄ -)L + ,) ,
22 * 个种子 点 ,每个 种子 点8 方 向 ,共可生 产3 个数 个 2
二 、算 法 实现 和 实验 结果
实验算法采用V 2 0 开发 。结果如下 : C 08 第一 组实 验 ,上 图是 由下 图放大 而来 ,且 ±
光 照 强 度 。两 幅 图 中
的箭 头 方 向代 表 了该 像 素 点 的梯 度 方 向 ,
LxYo =G xY ) (,) ( ) (,, ) (, ,o Ix 2
SF 特征匹配算法是Dai L we 0 4 IT vdG.o 在2 0 年总结了
现有 的基于不变量特征检测技术的基 础上 ,提出的一种
基于尺度空 间的,对 图像缩放 、旋转甚至仿 射变换保持
不 变性 的 图像 局部特 征描述算 法 。SF 特征是 图像 局 IT
骤 :1 特征点 的检测 ;2特 征 向量 的生成 ;3特 征 向 . 是 . .
量的匹配。
尺度对应 于图像 的概貌特征 ,小尺度对应于图像 的细节
特征 。选择 合适 的尺度 因子平 滑是建 立 尺度空 间 的关 键 。在这里 ,主要是建立高斯金字塔和D G( i ee c O D f rn e
1 . .
机器视觉处理算法中特征点匹配常用方法

一、介绍在机器视觉处理算法中,特征点匹配是一个重要的环节,它是指在两幅图像中找到相对应的特征点的过程。
特征点匹配的准确度会直接影响到后续的物体识别、目标跟踪、三维重建等任务的效果。
特征点匹配的算法选择和设计是至关重要的。
本文将针对机器视觉处理算法中特征点匹配常用方法进行全面评估,并提供个人观点和理解。
二、常用的特征点匹配方法1. Harris角点检测Harris角点检测是一种常用的特征点提取方法,通过计算图像的灰度变化来检测角点。
通过非极大值抑制和角点响应函数来筛选出最具代表性的角点。
2. SIFT特征匹配SIFT是一种基于局部特征的描述符,它通过在不同尺度空间和不同方向上寻找局部极值来检测图像的关键点,然后使用特征描述符进行匹配。
3. SURF特征匹配SURF是对SIFT算法的改进,它使用了快速Hessian矩阵检测关键点,并使用加速的Haar小波特征描述符进行匹配。
4. ORB特征匹配ORB是一种同时具备SIFT和SURF的优点的算法,它结合了FAST角点检测和BRIEF描述符,具有更快的速度和更好的性能。
5. 其他方法除了上述常用的特征点匹配方法,还有基于深度学习的方法、基于颜色直方图的方法、基于形状上下文的方法等,这些方法根据具体任务和应用场景选择的灵活性更强。
三、个人观点和理解在特征点匹配的方法中,不同的算法适用于不同的场景和要求。
对于实时性要求较高的场景,可以选择ORB特征匹配算法;对于精度要求较高的场景,可以选择SIFT或SURF特征匹配算法。
结合深度学习的方法可以在特定数据集上取得更好的效果。
在实际应用中,需要根据具体情况进行选择和组合使用。
四、总结回顾特征点匹配在机器视觉处理算法中起着至关重要的作用,不同的方法都有各自的优势和局限性。
通过本文的介绍,可以看出特征点匹配算法的发展已经非常成熟,并且在不断地向着更加快速、精确以及适用于更多场景的方向发展。
对于我个人而言,特征点匹配算法的研究不仅是对图像处理技术的挑战,更是对计算机视觉领域的探索。
基于Harris和SIFT的特征匹配算法
价值工程0引言立体匹配是三维重建中一个至关重要且最为复杂的一个环节,按匹配基元的不同,立体匹配可分为区域匹配、特征匹配和相位匹配。
文章重点讨论特征匹配。
目前,根据特征空间,相似性度量,搜索空间和搜索策略的不同,已经形成了许许多多各具特色的特征匹配算法[1~3],但如何合理提取图像的特征点并对其进行高精度匹配,仍然是计算机视觉技术的一个瓶颈,至今还未完全得到解决。
文章提出了一种基于Harris [4]和SIFT [5]的特征匹配算法,算法基于在特征匹配方面取得了显著进展、性能得到了充分肯定的Harris 特征和SIFT特征描述子,对基于尺度不变特征的Harris 角点提取算法提取出的特征点进行SIFT 特征描述,然后利用最近邻欧式距离以及阈值判决来进行双向匹配,能有效解决传统的特征匹配算法对图像尺寸和旋转比较敏感的问题。
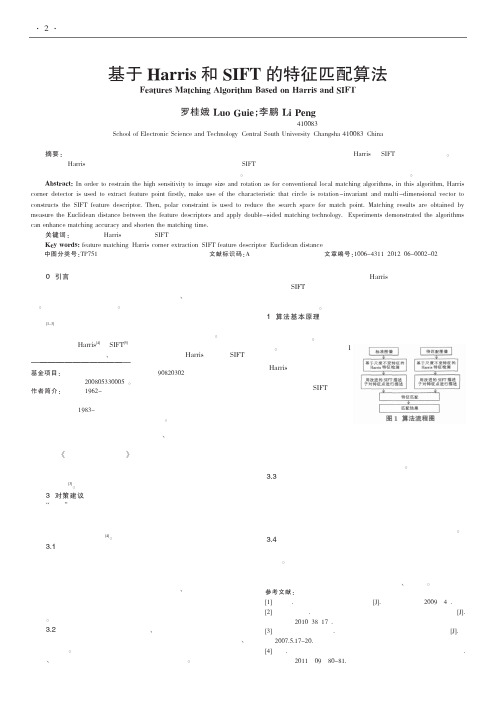
1算法基本原理特征匹配实质上就是在一幅图像中给定一点,寻找另一幅图像中的对应点的过程。
其基本步骤就是特征点提取,特征描述以及特征匹配。
算法的基本流程如图1所示,首先用基于尺度不变特征的Harris 特征检测算法提取标准图像和待匹配图像中的特征点,通过改进的SIFT 描述子并利用多维向量对各个特征点进行描述,通过立体视觉理论中的极线约束将匹配特征点的———————————————————————基金项目:国家自然科学基金重大专项项目(90820302);国家博士点基金资助项目(200805330005)。
作者简介:罗桂娥(1962-),女,湖南株洲人,中南大学电子科学与技术研究所,教授,主要研究信息融合技术,数字图像处理,智能仪器开发;李鹏(1983-),男,湖南益阳人,中南大学电子科学与技术研究所,硕士研究生,主要研究数字图像处理。
基于Harris 和SIFT 的特征匹配算法Features Matching Algorithm Based on Harris and SIFT罗桂娥Luo Guie ;李鹏Li Peng(中南大学电子科学与技术研究所,长沙410083)(School of Electronic Science and Technology ,Central South University ,Changsha 410083,China )摘要:为了克服传统的局部特征匹配算法对图像的尺寸和旋转比较敏感的缺点,文章提出了一种基于Harris 和SIFT 的特征匹配算法。
基于Harris-SURF描述符的图像配准方法

科学技术创新2020.20基于Harris-SURF 描述符的图像配准方法李慧慧(安徽理工大学测绘学院,安徽淮南232000)图像处理技术是计算机领域中较为重要的应用技术,而图像配准作为图像处理技术中一种,其应用范围较为广泛,例如数码显示、军事侦察、医学图像等。
配准的目的是找到一种功能,该功能将一个图像的点映射到另一图像的对应点,从而在图像之间提供几何对齐。
此过程可以补偿对象的运动或传感器之间的某些差异,从而实现在公共参考系中比较和分析图像[1]。
图像配准方法多种多样,主要是基于区域[2]和基于特征[3]两种方法。
当图像没有特定的细节和独特的信息时,使用基于区域的方法进行图像配准更适宜。
但是对于复杂图像,基于区域方法因通常更耗费时间而不适用作为配准方法。
当图像包含足够独特且可有效检测的对象时,通常使用基于特征的方法更为有效。
最经典的基于特征的方法是SIFT (Scale Invariant Feature Transformation )方法[4],该方法通过引入高斯算子的Laplacet 提取了尺度和旋转不变特征点,实现了自动图像匹配。
但缺点是它只能提取128维针对每个检测到的兴趣点,在特征匹配步骤中需要更多时间的特征向量,为了解决此问题,Bay [5]在2006年提出了SURF (Speed Up Robust Features )特征检测和描述符算法。
SURF 特征检测器与SIFT 具有相似的鲁棒性,但是相比于SIFT ,SURF 算法的运算效率更高,更能有效节约配准时间。
虽然SURF 算法具有较高运算效率,但是SURF 算法在寻找的特征点时具有不稳定性,在进行点对之间匹配时,易造成较多的错误匹配,从而对配准正确率造成影响。
本文主要思想是是通过利用Harris 算法检测到角点作为图像特征点,提取的特征点需要计算出相应的描述符才能进行特征点的匹配,采用SURF 描述符对其进行描述符的计算,获取点对之间的对应点对。
特征 图像匹配算法

特征图像匹配算法1. 简介特征图像匹配算法是一种计算机视觉中常用的算法,用于在两幅图像之间找到相对应的特征点,并将它们匹配起来。
这种算法在多个应用领域都有广泛的应用,包括图像检索、三维重建、目标跟踪等。
特征图像匹配算法的核心思想是通过提取图像中的关键特征点,然后计算这些特征点的描述子,在不同图像中进行匹配,找到相对应的特征点。
这些特征点通常是图像中的角点、边缘或者纹理等具有区分性的部分。
2. 特征提取在特征图像匹配算法中,特征点的提取是首要任务。
常用的特征点提取算法包括Harris角点检测、SIFT(Scale-Invariant Feature Transform)、SURF (Speeded-Up Robust Features)等。
•Harris角点检测是一种通过计算图像中像素点周围的灰度变化来检测图像中的角点的算法。
它主要是通过计算图像中每个像素点的窗口内的像素梯度的方差来确定是否为角点。
•SIFT是一种尺度不变特征变换的算法,它可以在不同大小和旋转角度的图像中匹配特征点。
SIFT算法首先通过高斯滤波器进行图像平滑,然后通过DoG(Difference of Gaussians)算子检测图像中的极值点作为特征点。
•SURF是一种类似于SIFT的特征提取算法,但它具有更快的计算速度和更好的旋转不变性。
SURF算法通过检测图像中的极值点,并计算它们的Haar小波特征来提取特征点。
3. 特征描述在特征提取之后,需要对特征点进行描述,以便在不同图像中进行匹配。
常用的特征描述算法包括ORB(Oriented FAST and Rotated BRIEF)、BRISK(Binary Robust Invariant Scalable Keypoints)等。
•ORB是一种具有旋转不变性和尺度不变性的特征描述算法。
它通过计算特征点周围的像素点在不同方向上的灰度变化来生成特征点的描述子。
最后,ORB算法将描述子通过二进制编码,以降低计算复杂度。
基于SURF算子与FLANN搜索的图像匹配方法研究

文章编号:1007-1423(2020)14-0049-05DOI:10.3969/j.issn.1007-1423.2020.14.011基于SURF算子与FLANN搜索的图像匹配方法研究徐明,刁燕(四川大学机械工程学院,成都610065)摘要:对于在传统的图像匹配过程中,存在误匹配率高和匹配效果不佳的问题,提出基于加速鲁棒特征(SURF)算法与快速近似最近邻查找(FLANN)搜索的图像匹配方法。
首先采用Hessian矩阵来获知图像的局部最值,然后在图像上构建尺度空间,通过不同的尺度空间定位出特征点,并确立特征点的主方向,再生成特征点描述子,最后结合FLANN搜索算法对图像进行匹配。
实验表明,该算法相对传统的图像匹配方法提高准确度和匹配效果。
关键词:SURF;特征提取;FLANN;图像匹配基金项目:四川大学泸州市人民政府战略合作项目(No.2018CDLZ-22)0引言图像匹配是指在两幅或者多幅图像中通过一定的算法找到相似影像的方法[1]。
在数字图像处理的研究过程中,图像的特征提取以及图像匹配一直是一个关键问题,在图像配准、目标检测、模式识别、计算机视觉等领域发挥着至关重要的作用[2]。
1998年,Harris和Stephens在工作的启发下提出Harris角点检测算法[3],是对Moravec算法的扩充和完善。
通过分别计算像素点在x和y方向上的梯度,利用高斯核函数对图像进行高斯滤波,然后根据角点响应函数计算原图像上对应的每个像素点的响应值,最后通过给定的阈值选取局部极值点来确定图像的特征点。
Harris算法是直接通过灰度图像然后进行角点提取,该算法适用于L型的角点检测,稳定性好,但是容易出现角点信息丢失和角点的位置偏移以及聚簇现象,运行速度也比较慢。
2004年,Lowe发表了尺度不变特征(Scale Invari⁃ant Feature Transform,SIFT)算法[4],通过构建高斯尺度空间,寻找极值点,剔除不稳定特征点,确定关键点方向和生成特征点描述子来提取图像的特征点。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
中 图分类号 : T P 3 9 1 . 4 l 文献标 志码 : A 文章 编号 : 1 0 0 7—8 5 5 X( 2 0 1 5 ) O l 一 0 0 5 0—0 5
Ve h i c l e I ma g e Ma t c h i n g Ba s e d o n Ha r r i s Co r n e r a n d S I FT Al g o r i t h m
V o 1 . 4 0 N o . 1
F e b .2 0 1 5
d o i : 1 0 . 1 6 1 1 2 / j . c n k i . 5 3—1 2 2 3 / n . 2 0 1 5 . 0 1 . 0 1 0
基 于 H辆 图像 匹配
L V He n g — l i ,SH ANG Z h e n — h o n g,L I U Hu i ,YU Do n g — l a n
( F a c u l t y o f I n f o r ma t i o n E n g i n e e r i n g a n d A u t o ma t i o n , K u n m i n g U n i v e r s i t y o f S c i e n c e a n d T e c h n o l o g y ,K u n m i n g 6 5 0 0 5 1 , C h i n a )
第4 0卷 第 1 期
2 0 1 5年 2月
昆明理 工大 学学报 ( 自然科 学版 )
J o u r n a l o f K u n mi n g U n i v e r s i t y o f S c i e n c e a n d T e c h n o l o g y( N a t u r a l S c i e n c e E d i t i o n )
吕恒利 , 尚振宏 , 刘 辉 , 吁冬 兰
( 昆明理工大学 信息工程与 自动化学院 , 云南 昆明 6 5 0 0 5 1 )
摘 要 :车辆 图像 匹配广泛 应 用于车 辆识 别和跟 踪 , 其中 S I F T( S c a l e I n v a r i a n t F e a t u r e T r a n s f o r m) 特 征 匹配算法 是 当前 国 内外特 征 点 匹配研 究 的热 点 , 但针 对 车辆 等 刚体特 征 明 显 的 目标 , S I T 算 F
Ab s t r a c t :Ve h i c l e i ma g e ma t c h i n g a l g o i r t h ms a r e wi d e l y u s e d i n t h e i f e l d o f v e h i c l e i d e n t i i f c a t i o n a n d t r a c k i n g,
法在 时 间复杂度 和稳 定性 方面 留 出了改进 空 间. 针 对车辆 图像 匹配 , 本 文基 于 Ha r r i s角点检 测 对
S I T 算法进行 改进. F 实验 结果表 明 : 该方 法在 车辆 图像 匹配 时 , 稳 定性 和 实时性 优 于 S I F T算法 .
关键 词 :S I E l ? ; H a r r i s ; 匹配 ; 特征点; 稳 定性
a n d S I T( F S c a l e i n v a r i a n t f e a t u r e t r a n s f o r m)i s t h e r e s e a r c h f o c u s b o t h a t h o me a n d a b r o a d f o r f e a t u r e p o i n t s m a t c h i n g .H o w e v e r , S I F T s t i l l n e e d s t o b e i m p r o v e d i n t i me c o m p l e x i t y a n d s t a b i l i t y o f r t h e o b j e c t s w h i c h h a v e