matlab实验九控制系统的PI校正设计与仿真设计
MATLAB在控制系统校正中的应用
MATLAB在控制系统校正中的应用摘要:随着时代进步和人们生活水平的提高,在人类探索未来、认识和改造自然的过程中,自动控制理论和技术必将发挥极其重要的作用。
然而,当对控制系统进行校正时,MATLAB语言能够有效、快速的实现系统校正的仿真,所以只有把MATLAB与自动控制系统结合起来才能发挥起巨大的作用。
本文对MATLAB 软件作了简要的介绍,总结了控制系统校正的主要方法,最后结合具体的例子,给出了利用MATLAB 设计出不同的控制器的方法。
关键词:MATLAB; 控制系统校正1.MATLAB 简介MATLAB 是集数值计算、符号运算及图形处理等强大功能于一体的科学计算语言。
作为强大的科学计算平台,它几乎能够满足所有的计算需求。
MATLAB 对许多专门的领域都开发了功能强大的模块集或工具箱,用户可以直接使用工具箱学习、应用和评估不同的方法而不需要自己编写代码。
目前,MATLAB 已经把工具箱延伸到了科学研究和工程应用的诸多领域,诸如数据采集、数据库接口、概率统计、样条拟合、控制系统设计、LMI 控制、鲁棒控制等。
由于MATLAB 语言在各方面的强大功能,目前它已作为工程和科学教育界的一种行业标准。
2. 控制系统的校正控制系统的校正问题,是自动控制系统设计理论的重要分支,也是具有实用意义的一种改善系统性能的手段与方法。
系统的设计问题,就是事先考虑了控制的作用,将控制对象与控制器进行一体化的设计[1]。
根据被控对象及其技术要求,设计控制器需要考虑多方面的问题,除了保证良好的控制性能之外,还要照顾到工艺性、经济性;同时使用寿命、容许的体积与重量、管理与维护的方便等也不容忽视。
在设计手段上,除了必要的理论计算之外,还需要配合一些局部和整体的模拟实验和数字仿真[2]。
因此,要达到比较满意的设计,需要综合多方面的知识和依赖长期实践的积累。
系统的校正问题,是一种原理性的局部设计。
通常是在对象、执行机构和测量元件等主要部件已经确定的条件下,设计校正装置的传递函数和调整系统放大系数[3],使系统的动态性能指标满足一定的要求。
PID控制系统的设计及仿真(MATLAB)

编号 0814143毕业论文( 2012 届本科)题目:PID控制系统的设计及仿真(MATLAB)学院:物理与机电工程学院专业:电气工程及其自动化作者姓名:指导教师职称:助教(研究生)完成日期: 2012 年 5 月 20 日二○一二年五月目录摘要 (1)Abstract (2)第一章绪论 (1)1.1 课题意义及来源 (1)1.2 温度控制系统的研究现状 (1)1.2.1工业温度控制发展简介 (1)1.2.2温度微机控制系统控制方案 (2)1.3 MA TLAB简介 (4)第二章被控对象及控制策略 (4)2.1被控对象 (5)2.2 控制策略 (6)2.2.1比例、积分、微分 (6)2.2.2 P、I、D控制 (8)第三章PID最佳调整法与系统仿真 (10)3.1 PID参数整定法概述 (10)3.1.1 PID参数整定方法 (10)3.1.2 PID调整方式 (10)3.2针对无转移函数的PID调整法 (11)3.2.1Relay feedback调整法 (11)3.2.2Relay feedback 在计算机做仿真 (12)3.2.3在线调整法 (13)3.2.4在线调整法在计算机做仿真 (14)3.3 针对有转移函数的PID调整方法 (15)3.3.1系统辨识法 (15)3.3.2波德图法及根轨迹法 (17)3.4 仿真结果及分析 (17)总结 (20)参考文献 (21)致谢 (22)河西学院本科生毕业设计诚信声明本人郑重声明:所呈交的本科毕业设计,是本人在指导老师的指导下,独立进行设计工作所取得的成果,成果不存在知识产权争议,除文中已经注明引用的内容外,本设计不含任何其他个人或集体已经发表或撰写过的作品成果。
对本文的研究做出重要贡献的个人和集体均已在文中以明确方式标明。
本人完全意识到本声明的法律结果由本人承担。
作者签名:二〇年月日河西学院本科生毕业论文(设计)开题报告摘要随着科技的不断进步,在控制系统中温度是常用的被控参数,而采用MATLAB 来对这些被控参数进行控制已成为当今的主流。
第6章 基于MATLAB的控制系统校正 [基于MATLAB的控制系统仿真及应用]
![第6章 基于MATLAB的控制系统校正 [基于MATLAB的控制系统仿真及应用]](https://img.taocdn.com/s3/m/06b2839d2cc58bd63086bd31.png)
打开SISO设计工具窗口
• SISO设计工具的打开方式有很多,主要有以 下两种方法:
(1)在MATLAB命令窗口中输入:
>> sisotool 运行后打开SISO设计工具。 (2)在MATLAB命令窗口中输入:
>> G=tf([1],[1 1 0]);
>> sisotool(G)
运行后,即导入函数
10
传递函数为 ,要 G0(s)
s(s
K 1)(0.5s
1)
求: Kv 5 ;y 40o ;Kg 10dB ,试确定滞
后校正参数a,T
5
6.4 SISO设计工具
• SISO设计工具(SISO Design Tool)是MATLAB提供的能够分析及调 整单输入单输出反馈控制系统的图形用户界面。使用SISO设计工具可 以设计四种类型的反馈系统,如图6.4.1所示。图中C(s)为校正装置的 数学模型;G(s)为被控对象的数学模型;H(s)为传感器(反馈环节)的 数学模型;F(s)为滤波器的数学模型。
,其中a、t可调节
r (t )
Gc (s)
G(s) u (t )
H (s)
图6.3.1 滞后校正示意图
4
【例6.3.1】设单位负反馈系统的开
环传递函数为
G(s)
s(s
10 1)( s
2) ,试设
计一滞后校正系统,使得校正后的
系统相位裕度不小于40°,幅值裕
பைடு நூலகம்
度不低于10 dB。
【例6.3.2】控制系统不可变部分的
G(s)
1 s2
s
的数据
8
系统数据的导入
控制系统matlab仿真实验报告5

控制系统matlab仿真实验报告5实验内容:本实验主要学习控制系统中PI控制器的设计和仿真。
实验目的:1. 了解PI控制器的基本原理和控制算法;2. 学习控制系统建模的基本思路和方法;3. 通过matlab仿真实验掌握PI控制器的实现方法和调节技巧。
实验原理:PI控制器是一种比比例控制器更加完善的控制器,它是由比例控制器和积分控制器组成的复合控制器。
在控制器设计中,通常情况下采用PI控制器进行设计,因为PI控制器的设计参数比其他控制器更加简单,调整起来也更加方便。
PI控制器的输出信号u(t)可以表示为:u(t) = kP(e(t) + 1/Ti ∫e(τ)dτ)其中,kP是比例系数;Ti是积分时间常数;e(t)是控制系统的误差信号,表示偏差;∫e(τ)dτ是误差信号的积分项。
上式中,第一项kPe(t)是比例控制器的输出信号,它与偏差信号e(t)成比例关系,当偏差信号e(t)越大,则输出信号u(t)也越大;PI控制器的设计步骤如下:1. 根据控制系统的特性和要求,选择合适的控制对象,并进行建模;2. 选择比例系数kP和积分时间常数Ti,使系统具有良好的动态响应和稳态响应;3. 利用matlab仿真实验验证控制系统的性能,并进行参数调节和改进。
实验步骤:1. 控制对象的建模a. 选择一个适当的控制对象,例如在本实验中选择一个RC电路。
b. 根据控制对象的特性和运行原理,建立控制对象的数学模型,例如在本实验中建立RC电路的微分方程模型。
a. 根据控制对象的特性和要求,选择合适的比例系数kP和积分时间常数Ti,例如在本实验中选择kP=1和Ti=0.1。
b. 根据PI控制器的输出信号,设计控制系统的反馈环路,例如在本实验中选择负反馈控制系统。
a. 在matlab环境下,利用matlab的控制系统工具箱,建立控制系统的仿真模型。
b. 运行仿真程序,并观察控制系统的时间响应和频率响应特性。
实验结果:本实验利用matlab环境下的控制系统工具箱,建立了RC电路的PI控制系统,并进行了仿真实验。
MATLAB的控制系统校正实验
实验四基于MATLAB的控制系统校正实验一、实验目的1.熟悉并掌握MATLAB的使用2.掌握用MATLAB实现频率法的串联校正验证3.用MATLAB程序解决一般性设计问题二、实验内容1.录入并执行教材6.7三个程序并得出结果并比较2.通过6.7程序,完成6-3,6-4,6-5习题仿真三、实验过程1.录入程序,并完成教材6.7三个程序的仿真2.验证其结果3.绘制三个程序的流程图4.设计6-3,6-4,6-5,习题仿真程序5.验证仿真结果四、实施过程及结果1.录入书中程序并执行得出结果:(1)串联超前校正实验Mum/den=0.22541s+1--------------0.053537+1校正后:幅值穿越频率=8.8802rad/s,相角穿越频率=Inf rad/s。
校正后:幅值裕量=Inf dB,相角裕量=50.7196°Bode图:(2)串联滞后校正实验校正后:幅值穿越频率=0.60508rad/sec相角穿越频率=1.8675rad/sec校正后:幅值裕量=15.8574dB,相角裕量=40.6552゜Bode图:(3)串联滞后—超前校正实验校正后:幅值穿越频率=1.3175rad/sec相角穿越频率=3.6027rad/sec校正后:幅值裕量=13.7848dB,相角裕量=52.4219゜Bode图验证成功2.设计6-3,6-4,6-5,程序如下6-3:numo=[200];deno=conv([1,0],[0.1,1]);[Gm,Pm,Wcg,Wcp]=margin(numo,deno);numo=200;deno=conv([1,0],[0.1,1]);[Gm1,Pm1,Wcg1,Wcp1]=margin(numo,deno);r0 = 45;r=Pm;w = logspace(-1,3);[mag1,phase1]=bode(numo,deno,w);for epsilon = 5:15phic=(r0-r+epsilon)*pi/180;alpha=(1-sin(phic))/(1+sin(phic));[i1,ii] = min(abs(mag1-sqrt(alpha)));wc=w(ii);T=1/(wc*sqrt(alpha));numc=[T,1];denc=[alpha*T,1];[num,den]=series(numo,deno,numc,denc);[Gm,Pm,Wcg,Wcp]=margin(num,den);if(Pm>=r0);break;endendprintsys(numc,denc);[mag2,phase2]=bode(numc,denc,w);[mag,phase]=bode(num,den,w);subplot(2,1,1);semilogx(w,20*log10(mag),w,20*log10(mag1),'--',w,20*log10(mag2),' -.');grid;ylabel('幅值(dB)');title('--Go. -.Gc, __GoGc');subplot(2,1,2);semilogx(w,phase,'--',w,phase1,'-.',w,phase2,w,(w-180-w),':'); grid;ylabel('相角(度)');xlabel('频率(red/sec)');disp(['校正后:幅值穿越频率=',num2str(Wcp),'rad/sec','相角穿越频率=',num2str(Wcg),'rad/sec']);disp(['校正后:幅值裕量=',num2str(20*log10(Gm)),'dB,','相角裕量=',num2str(Pm),'゜']);结果:校正后:幅值穿越频率=64.7053rad/sec相角穿越频率=Infrad/sec校正后:幅值裕量=InfdB,相角裕量=45.9356゜验证结果即正确6-4numo=4;deno=conv([1,0],[2,1]);[Gm,Pm,Wcg,Wcp]=margin(numo,deno);numo=4;deno=conv([1,0],[2,1]);[Gm1,Pm1,Wcg1,Wcp1]=margin(numo,den o);r0=40;w=logspace(-3,1);[mag1,phase1]=bode(numo,deno,w);for epsilon=5:15r=(-180+r0+epsilon);[i1,ii]=min(abs(phase1-r));wc=w(ii);beta=mag1(ii);T=5/wc;numc=[T,1];denc=[beta*T,1];[num,den]=series(numo,deno,numc,denc);[Gm,Pm,Wcg,Wcp]=margin(num,den);if(Pm>=r0);break;endendprintsys(numc,denc);[mag2,phase2]=bode(numc,denc,w);[mag,phase]=bode(num,den,w);subplot(2,1,1);semilogx(w,20*log10(mag),w,20*log10(mag1),'--',w,20*log10(mag2),' -.');grid;ylabel('幅值(dB)');title('--Go. -.Gc, __GoGc');subplot(2,1,2);semilogx(w,phase,'--',w,phase1,'-.',w,phase2,w,(w-180-w),':'); grid;ylabel('相角(度)');xlabel('频率(red/sec)');disp(['校正后:幅值穿越频率=',num2str(Wcp),'rad/sec','相角穿越频率=',num2str(Wcg),'rad/sec']);disp(['校正后:幅值裕量=',num2str(20*log10(Gm)),'dB,','相角裕量=',num2str(Pm),'゜']);结果:校正后:幅值穿越频率=0.415rad/sec相角穿越频率=Infrad/sec校正后:幅值裕量=InfdB,相角裕量=40.6397゜验证结果:6-5:numo=5;deno=conv([1,0],conv([0.1,1],[0.25,1]));[Gm,Pm,Wcg,Wcp]=ma rgin(numo,deno);numo=5;deno=conv([1,0],conv([0.1,1],[0.25,1]));[Gm1,Pm1,Wcg1,Wcp1 ]=margin(numo,deno);w=logspace(-2,2);[mag1,phase1]=bode(numo,deno,w);ii=find(abs(w-Wcg1)==min(abs(w-Wcg1)));wc=Wcg1;w1=wc/5;beta=5;numc1=[1,w1];denc1=[1,w1/beta];w2=w1;mag(ii)=2;while(mag(ii)>1)numc2=[1,w2];denc2=[1,(w2*beta)];w2=w2+0.01;[numc,denc]=series(numc1,denc1,numc2,denc2);[num,den]=series(numo,deno,numc,denc);[mag,phase]=bode(num,den,w);endprintsys(numc1,denc1);printsys(numc2,denc2);[Gm,Pm,Wcg,Wcp]=margin(num,den);[mag2,phase2]=bode(numc,denc,w);[mag,phase]=bode(num,den,w);subplot(2,1,1);semilogx(w,20*log10(mag),w,20*log10(mag1),'--',w,20*log10(mag2),' -.');grid;ylabel('幅值(dB)');title('--Go. -.Gc, __GoGc');subplot(2,1,2);semilogx(w,phase,'--',w,phase1,'-.',w,phase2,w,(w-180-w),':'); grid;ylabel('相角(度)');xlabel('频率(red/sec)');disp(['校正后:幅值穿越频率=',num2str(Wcp),'rad/sec','相角穿越频率=',num2str(Wcg),'rad/sec']);disp(['校正后:幅值裕量=',num2str(20*log10(Gm)),'dB,','相角裕量=',num2str(Pm),'゜']);结果:校正后:幅值穿越频率=1.8187rad/sec相角穿越频率=9.3957rad/sec校正后:幅值裕量=17.8382dB,相角裕量=67.4806゜五、实验总结1.由于对于MATLAB不熟悉造成很多不必要的损失,对于MATLAB的使用掌握也要认真学习。
《MATLAB与控制系统仿真》实验报告
《MATLAB与控制系统仿真》实验报告一、实验目的本实验旨在通过MATLAB软件进行控制系统的仿真,并通过仿真结果分析控制系统的性能。
二、实验器材1.计算机2.MATLAB软件三、实验内容1.搭建控制系统模型在MATLAB软件中,通过使用控制系统工具箱,我们可以搭建不同类型的控制系统模型。
本实验中我们选择了一个简单的比例控制系统模型。
2.设定输入信号我们需要为控制系统提供输入信号进行仿真。
在MATLAB中,我们可以使用信号工具箱来产生不同类型的信号。
本实验中,我们选择了一个阶跃信号作为输入信号。
3.运行仿真通过设置模型参数、输入信号以及仿真时间等相关参数后,我们可以运行仿真。
MATLAB会根据系统模型和输入信号产生输出信号,并显示在仿真界面上。
4.分析控制系统性能根据仿真结果,我们可以对控制系统的性能进行分析。
常见的性能指标包括系统的稳态误差、超调量、响应时间等。
四、实验步骤1. 打开MATLAB软件,并在命令窗口中输入“controlSystemDesigner”命令,打开控制系统工具箱。
2.在控制系统工具箱中选择比例控制器模型,并设置相应的增益参数。
3.在信号工具箱中选择阶跃信号,并设置相应的幅值和起始时间。
4.在仿真界面中设置仿真时间,并点击运行按钮,开始仿真。
5.根据仿真结果,分析控制系统的性能指标,并记录下相应的数值,并根据数值进行分析和讨论。
五、实验结果与分析根据运行仿真获得的结果,我们可以得到控制系统的输出信号曲线。
通过观察输出信号的稳态值、超调量、响应时间等性能指标,我们可以对控制系统的性能进行分析和评价。
六、实验总结通过本次实验,我们学习了如何使用MATLAB软件进行控制系统仿真,并提取控制系统的性能指标。
通过实验,我们可以更加直观地理解控制系统的工作原理,为控制系统设计和分析提供了重要的工具和思路。
七、实验心得通过本次实验,我深刻理解了控制系统仿真的重要性和必要性。
MATLAB软件提供了强大的仿真工具和功能,能够帮助我们更好地理解和分析控制系统的性能。
基于MATLAB的控制系统校正设计
······························装·················订·················线······························摘要控制系统校正属于系统设计环节,通过校正可以使系统的性能得到改善,从而使系统满足期望的性能指标。
本文主要研究线性定常系统的串联校正方法,包括串联超前校正、串联滞后校正和串联滞后超前校正。
本文首先回顾了系统的时域性能指标和频域性能指标以及系统的校正方式,然后分别讨论了系统校正的根轨迹法和频率特性法。
针对两种方法,分别给出了控制系统超前校正、滞后校正,滞后超前校正的理论依据、适用范围、校正步骤和相应的算法流程图,并针对各个校正方法编写了相应的MATLAB仿真程序,同时利用MATLAB的图形用户界面设计功能对控制系统校正进行了可视化界面设计,为每种校正方法设计了对应的GUI界面。
PID控制算法matlab仿真实验
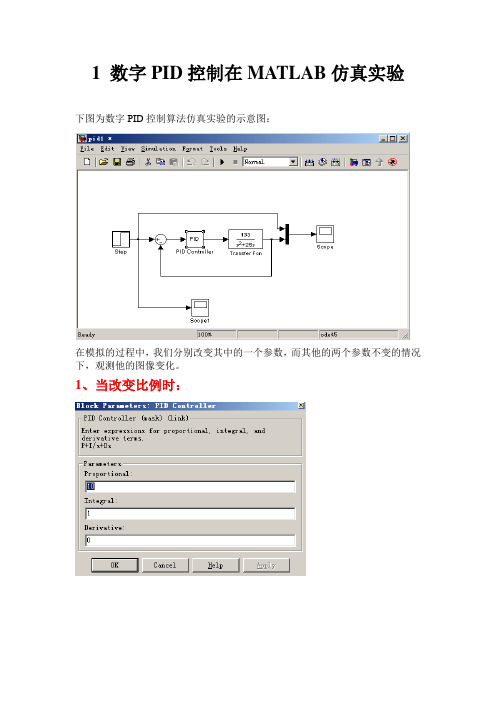
1 数字PID控制在MATLAB仿真实验下图为数字PID控制算法仿真实验的示意图:
在模拟的过程中,我们分别改变其中的一个参数,而其他的两个参数不变的情况下,观测他的图像变化。
1、当改变比例时:
分析结果:当只改变比例,积分和微分都不变的情况下,比例系数越大,调节作用越强,但是存在调节误差。
2、当只改变积分时
分析结果:当系统中只改变积分,而比例和微风都不变时,可以减少或消除误差,但响应慢。
3、当只改变微分时
分析结果:当系统中加入了微分环节时,改善了系统的稳定性能和动态性能,但是,它的响应比较慢。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验九 控制系统的PI 校正设计及仿真
一、
实验目的
1. 应用频率综合法对系统进行PI 校正综合设计; 2.学习用MATLAB 对系统性能进行仿真设计、分析;
二、实验设计原理与步骤 1.设计原理
滞后校正(亦称PI 校正)的传递函数为: )1(1
1)(>++=
ββTs Ts S G C
其对数频率特性如图9-1所示,参数β表征滞后校正的强度。
2.设计步骤
基于频率法的综合滞后校正的步骤是:
(1)根据静态指标要求,确定开环比例系数K ,并按已确定的K 画出系统固有部分的Bode 图;
(2)根据动态指标要求试选c ω,从Bode 图上求出试选的c ω点的相角,判断是否满足相位裕度的要求(注意计入滞后校正带来的0
12~5的滞后量),如果满足,转下一步。
否则,如果允许降低c ω,就适当重选较低的c ω;
(3)从图上求出系统固有部分在c ω点的开环增益Lg (c ω)。
如果Lg (c ω)>0令Lg (c ω)=20lg β,求出β,就是滞后校正的强度,如果Lg (c ω)〈0,则无须校正,且可将开环比例系数提高。
(4)选择C T ωω)10
1
~51(12==
,进而确定T βω11=。
(5)画出校正后系统的Bode 图,校核相位裕量。
滞后校正的主要作用是降低中频段和高频段的开环增益,但同时使低频段的开环增益不受影响,从而达到兼顾静态性能与稳定性。
它的副作用是会在c ω点产生一定的相角滞后。
三、实验容
练习9-1 设系统原有开环传递函数为: )
15.0)(1()(++=
S S S K
S G g
系统的相位裕度γ0
40≥ 系统的开环比例系数K= 5 S -1
截止频率为c ω=0.5 S -1
要求:
(1)用频率法设计满足上述要求的串联滞后校正控制器; (2)画出校正前后的Bode 图
(3)用Simulink 对校正前后的闭环系统进行仿真,求出其阶跃响应; (4)分析设计效果。
k0=5;n1=1;
d1=conv(conv([1,0],[1,1]),[0.5 1]); w=logspace(-1,3,1000);
sope=tf(k0*n1,d1);
figure(1)
margin(sope);grid on
wc=0.5;
num=sope.num{1};
den=sope.den{1};
na=polyval(num,j*wc);
da=polyval(den,j*wc);
g=na/da;
g1=abs(g);
h=20*log10(g1);
beta=10^(h/20); t=10/wc; bt=beta*t;
gc=tf([t,1],[bt,1]) sys1=sope*gc
[mag1,phase1,w]=bode(sys1,w);
[gm1,pm1,wcg1,wcp1]=margin(mag1,phase1,w); figure(2) margin(sys1); grid on; 滞后: 20 s + 1 ----------- 173.5 s + 1
练习9-2设被控对象开环传递函数为:
)
5(10
)(+=
S S S G g
系统的相位裕度γ0
40≥
系统斜坡输入稳态误差e ss =0.05; 截止频率为c ω=2 1/ S 要求:
(1)用频率法设计满足上述要求的串联滞后校正控制器; (2)画出校正前后的Bode 图;
(3)用Simulink 对校正前后的闭环系统进行仿真,求出其阶跃响应; (4)分析设计效果。
滞后: 5 s + 1 ----------- 92.85 s + 1 k0=20;n1=10;
d1=conv([1,0],[1,5]); w=logspace(-1,3,1000); sope=tf(k0*n1,d1); figure(1)
margin(sope);grid on wc=2;
num=sope.num{1}; den=sope.den{1};
na=polyval(num,j*wc); da=polyval(den,j*wc); g=na/da; g1=abs(g);
h=20*log10(g1); beta=10^(h/20); t=10/wc; bt=beta*t;
gc=tf([t,1],[bt,1]) sys1=sope*gc
[mag1,phase1,w]=bode(sys1,w);
[gm1,pm1,wcg1,wcp1]=margin(mag1,phase1,w); figure(2) margin(sys1); grid on;
练习9-3 已知单位反馈系统被控对象开环传递函数为:
)
12.0)(11.0(1
)(0
0++=s S S K S G
试用BODE 图设计方法对系统进行滞后串联校正设计,使之满足:
(1)在单位斜坡信号r (t )= t 的作用下,系统的速度误差系数K V 1
30-≥s ; (1) 系统校正后剪切频率ωC 1
3.2-≥s ; (3)系统斜校正后相角裕度γ040≥ 要求:
(1)用频率法设计满足上述要求的串联滞后校正控制器; (2)画出校正前后的Bode 图;
(3)用Simulink 对校正前后的闭环系统进行仿真,求出其阶跃响应; (4)分析设计效果。
clear
%s=tf('s')
%G=30/s(0.1s+1)(0.2s+1)
k0=30;n1=1;
d1=conv(conv([1,0],[0.1,1]),[0.2 1]); w=logspace(-1,3,1000);
sope=tf(k0*n1,d1);
figure(1)
margin(sope);grid on
wc=2.3;
num=sope.num{1};
den=sope.den{1};
na=polyval(num,j*wc);
da=polyval(den,j*wc);
g=na/da;
g1=abs(g);
h=20*log10(g1);
beta=10^(h/20);
t=10/wc;
bt=beta*t;
gc=tf([t,1],[bt,1])
sys1=sope*gc
[mag1,phase1,w]=bode(sys1,w);
[gm1,pm1,wcg1,wcp1]=margin(mag1,phase1,w); figure(2)
margin(sys1);
grid on;。