Stewart六自由度动感平台结构优化设计_赵洁修
Stewart型六自由度并联机构控制

Stewart型六自由度并联机构控制作者:吴琼来源:《中国科技纵横》2013年第03期【摘要】本文对Stewart 型六自由度并联机构的控制步骤进行了描述,提出了一种六自由度并联机构的控制方法。
其结构简洁,可靠性高,具有一定的工程实用价值,并且广泛适用于各领域Stewart 型六自由度并联机构的控制。
【关键词】 Stewart 型六自由度实时控制反解1 引言六自由度并联机构是近些年研究的热点技术之一。
目前该机构已广泛应用于坦克驾驶模拟、高速列车模拟、船舰驾驶模拟、汽车驾驶模拟、飞行器驾驶模拟、等多种驾驶员培训设备及公众娱乐设备之中[1]。
六自由度并联机构具有如下特点:(1)并联机构运动平台由多杆支承,与串联结构相比刚度大、结构稳定;(2)与串联结构相比,在相同自重与体积下承载能力高;(3)并联机构末端件没有串联结构末端件的误差积累和放大作用,误差小、精度高;(4)基于并联机构的机械很容易将电机置于机座上,运动负荷比较小,而基于串联机构的机械其电机及传动系统都放在运动件上,增加了系统的惯性,恶化了动力性能;(5)在运动学求解上,并联机构正解困难、逆解非常容易,而串联机构的正解容易、逆解十分困难,由于在实时控制这些机构时要计算逆解,故并联机构在这方面很有优势。
本文对Stewart型六自由度并联机构的控制步骤进行了描述,提出了一种六自由度并联机构的控制方法。
2 并联机构反解Stewart型六自由度并联机构的分析是其控制策略设计的基础,因此确定机构模型对之后的研究至关重要。
分析其模型的一般方法为先对Stewart化简如图1所示。
上下平台间通过六根电动缸和12个铰点连接,通过1~6六根电动缸的运动驱动上平台做指定的运动。
如图1所示上平台建立惯性坐标系(也称为静坐标系)Ob-XbYbZb和连体坐标系(也称为动坐标系)Op-XpYpZp,静坐标系与动坐标系在初始位置时是完全重合的,坐标系的方向如图1所示。
上平台中心在连体坐标系中的坐标向量为ai(i=1,2,……,6),下平台中心在静坐标系的坐标为Bi(i=1,2,……,6)。
Stewart 型六自由度平台正反解研究

Stewart 型六自由度平台正反解研究蔡保富,廖传书武汉理工大学 电信系,武汉(430070)E-mail: cbf65627972@摘 要:本文研究了Stewart 型六自由度平台的正解和反解。
根据Stewart 型六自由度平台的结构的特点,为了达到高精度的实时控制,设计出具有算法简单、效率高,并具有易于编程的正反解算法。
本算法已经在MATLAB 下仿真模拟过,并嵌入到实际平台上VxWorks 系统下实际实现。
本文介绍这一算法的实现思想。
关键词:Stewart 型六自由度平台;正解;反解;实时控制;VxWorks1引 言六自由度运动平台是一种重要的仿真实验设备,其应用范围非常广泛。
因其结构简单、高刚度、高精度和高负载能力等优点,六自由度运动平台已成为飞机、舰船、宇航和车载设备进行动态可靠性研究的重要模拟试验装置。
这种系统普遍采用Stewart 平台及其变形机构,平台有上下两个平台和6个并联的、可独立自由伸缩的杠杆组成,伸缩杠和平台之间通过球铰链联接,通过改变伸缩杠的长度可以实现上动台面的空间多自由度运行[1]。
对于并联机构的六自由度平台在运动过程中,要保证运动的实时性和正确性,就需要通过对伸缩杠的精确控制来实现,这就需要引入六自由度平台的实时位置正反解算法。
所谓六自由度平台的位置反解,是指由运动平台的空间姿态求六个伸缩杠的伸缩量。
而六自由度的位置正解,是指有六个伸缩杠的伸缩量来求运动平台的空间姿态[2]本课题就是通过对Stewart 型六自由度运动平台的研究,建立一种具有运动学正反解的数学模型,通过计算机程序实现该数学模型,仿真并实际运行。
2运动平台空间位置分析对于一种机构的运动分析包括位置分析、速度分析和加速度分析三部分,位置分析是运动学分析最基本的任务。
机构的位置分析是求解机构的输出和输入构件之间的位置关系。
对于Stewart 型六自由度平台就是六个输入杠的长度和作为输出的运动平台的姿态和位置之间的关系[3]。
六自由度Stewart平台误差建模及误差补偿分析
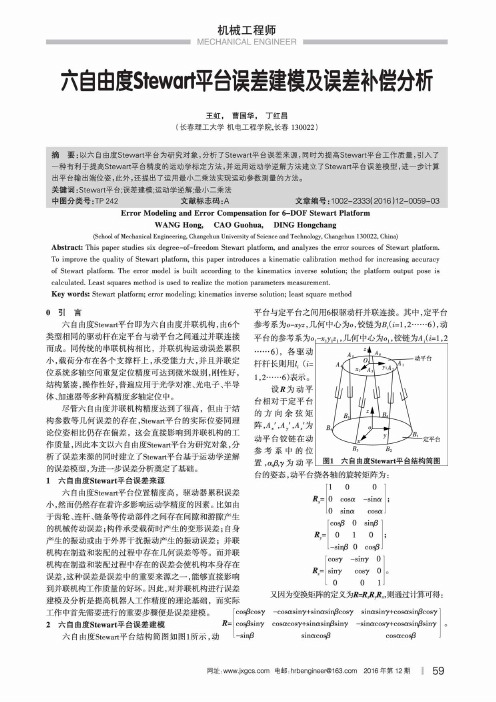
六自由度Stewart平台结构简图如图1所 示 ,动 -sin^S
sinacosjS
cosacos^S
网 址 : 电邮:hrbengineer@ 2016 年第 12 期 ■ 5 9
机械工程师
MECHANICAL ENGINEER
将简化为
Key words:Stewart platform; error modeling; kinematics inverse solution; least square method
〇 引言
六 自 由 度 Stewart平 台 即 为 六 自 由 度 并 联 机 构 ,由6个
类型相同的驱动杆在定平台与动平台之间通过并联连接 而 成 。同传统的串联机构相比,并联机构运动误差累积
of Stewart platform. The error model is built according to the kinematics inverse solution; the platform output pose is
calculated. Least squares method is used to realize the motion parameters measurement.
机械工程师
MECHANICAL ENGINEER
六自由度Stewart平台误差建模及误差补偿分析
王虹, 曹国华, 丁红昌 (长春理工大学机电工程学院,长 春 130022)
摘 要 :以六自由度Stewart平台为研究对象,分析了 Stewart平台误差来源,同时为提高Stewart平台工作质量,引入了
又 因 为 变 换 矩 阵 的 定 义 为 凡 ,则通过计算可得:
建 模 及 分 析 是 提 高 机 器 人 工 作 精 度 的 理 论 基 础 ,而 实 际
Stewart型六自由度运动平台反解算法研究

Research of Inverse Solution Algorithm for a 6-DOF Stewart Motion Platform
SHEN Zhou, ZHU Xiao-min, CAO Yu-xin
(Beijing Research Institute of Automation for machinery Industry, Beijing 100120,China)
Hydraulics Pneumatics & Seals/No.07.2017
doi:10.3969/j.issn.1008-0813.2017.07.016
Stewart 型六自由度运动平台反解算法研究
摘 要: Stewart 型六自由度运动平台, 能够完成空间中六个自由度的运动。该文通过研究 Stewart 平台的机构特点和相关理论, 总结出
Abstract: 6-DOF motion stewart platform can actualize the space movements at six degrees of freedom. In this paper, the mechanism characteristics and related theory of the stewart platform will be researched.And then, the operation law of its kinematic inverse solution will be summarized. The inverse solution algorithm will be written, and the motion model will be established through Simulink in MATLAB. We give a target attitude curve to get the simulation curve by controlling the motion model through caculation. Then, the correctness of the algorithm can be judged by comparing the simulation curve with the target attitude curve. The research process provides a theoretical basis for the 6-dof motion platform and its control system, and lays the foundation for the 6-dof motion platform as a vibration table test. Key words: stewart; 6-DOF platform; Inverse kinematics; motion model; simulink
六自由度运动平台设计方案

六自由度运动平台设计方案1概述YYPT原理样机用原库房留存的345厂的直流电机作为动力源,直流驱动器及工控机作为控制系统元件,采用VB软件进行控制软件的编制,因设计及器件选型的原因,导致YYPT原理样机,在速度、精度、运动规律上等几个技术指标无法满足原规定的指标要求,现在此基础上进行优化方案的设计。
2 原理样机技术状态2.1 原理样机方案2.1.1 组成原理样机采用工控机作为系统的控制单元,工控机内配有研华PCI1716和PCI1723作为A/D和D/A模拟量卡,驱动器采用AMC公司的型号为12A8的伺服驱动器,并配有直流可调电源其输出电流可达到150A,采用KH08XX(3)电动缸作为运动平台的六条支腿,电动缸上安装有电阻尺作为位置反馈器件,上平台与电动缸连接采用球笼联轴器,下平台与电动缸连接采用虎克铰链方式。
具体产品组成表见表2.1。
6 直流电源 12.1.2 结构方案六自由度运动平台是由六条电动缸通过虎克铰链和球笼万向节联轴器将上、下两个平台连接而成,下平台固定在基础上,借助六条电动缸的伸缩运动,完成上平台在三维空间六个自由度(X ,Y ,Z ,α,β,γ)的运动,从而可以模拟出各种空间运动姿态。
图1 六自由度平台外形图a )球笼联轴器(如图2所示)采用球笼铰链与上平面连接。
球笼铰链结构简单、体积小、运转灵活、易于维护。
初选球笼铰链型号BJB (JB/T6139-1992),公称转矩Tn=2000N/m ,工作角度40度,外径D=68mm ,轴孔选用圆柱孔d=24mm ,总长度L1=148mm ,转动惯量为0.00008kg.m ²,重量5kg 。
球笼联轴器电动缸虎克铰链上动平台下静平台图2 球笼联轴器b)虎克铰链(如图3所示)采用虎克铰链与下平面连接。
万向节铰链传动效率高,允许两轴间的角位移大,适用于有大角位移的两轴之间的连接,一般两轴的轴间角最大可达35º~45º,噪音小,对润滑要求不高,传递转矩大,而且使用可靠,因此获得广泛的应用。
基于Stewart平台的6自由度力反馈手控器

基于Stewart平台的6自由度力反馈手控器
邓乐;赵丁选;倪涛;郑宏宇
【期刊名称】《农业机械学报》
【年(卷),期】2005(036)007
【摘要】手控器是主从遥操作系统的关键设备,可以向遥操作系统传送位置、姿态、速度和力等多种信息,同时可以接收从机械手的力/力矩信息,为操作者提供力觉临场感.对基于Stewart平台的6-DOF力反馈手控器进行了总体结构设计,该装置的主
体由一个6-DOF Stewart平台、电液比例控制系统及控制与检测系统等组成.介绍了系统的各部分组成、工作原理、结构特点;建立了力反馈系统,分析了实现力觉反
馈的原理;推导了平台的运动学逆解、动力学正解;研究了结构尺寸与性能的关系.【总页数】5页(P118-121,134)
【作者】邓乐;赵丁选;倪涛;郑宏宇
【作者单位】吉林大学机械科学与工程学院;吉林大学机械科学与工程学院;吉林大
学机械科学与工程学院;吉林大学机械科学与工程学院
【正文语种】中文
【中图分类】TP24
【相关文献】
1.一种七自由度力反馈手控器测控系统设计 [J], 吴常铖;宋爱国
2.混联式三自由度手控器的位置标定方法 [J], 朱澄澄;宋爱国;徐效农;倪得晶
3.一种新型六自由度通用型手控器 [J], 崔建伟;宋爱国;黄惟一;王一清
4.一种三维力反馈手控器 [J], 吴剑锋;宋爱国;李建清
5.一种混联式力反馈手控器设计及运动学仿真 [J], 安宏雷;韦庆;韩大鹏
因版权原因,仅展示原文概要,查看原文内容请购买。
Stewart平台位置反解研究

Stewart平台位置反解研究赵静一;张荣兵;孙龙;郭锐;李文雷【期刊名称】《液压与气动》【年(卷),期】2017(000)012【摘要】Stewart机构运动比较复杂,仅仅通过数学模型的方法,无法充分直观的分析机构在不同位姿下各条液压缸长度的变化情况.据此,提出了基于Simulink环境下对Stewart平台进行位置反解的建模与仿真方法.在通过建立Stewart平台位置反解数学模型的基础上,分析了Simulink中各模块的使用及参数设置方法,对位置反解的数学模型进行了建模,并对Stewart机构6个单自由度的液压缸运动进行了仿真.结果表明,通过仿真曲线直观地了解了六自由度摇摆台位姿变化时,6条液压缸杆长变化规律.【总页数】8页(P40-47)【作者】赵静一;张荣兵;孙龙;郭锐;李文雷【作者单位】燕山大学河北省重型机械流体动力传输与控制重点实验室,河北秦皇岛066004;燕山大学先进锻压成形技术与科学教育部重点实验室,河北秦皇岛066004;秦皇岛燕大一华机电工程技术研究院有限公司,河北秦皇岛066004;燕山大学河北省重型机械流体动力传输与控制重点实验室,河北秦皇岛066004;燕山大学机械工程学院,河北秦皇岛066004;燕山大学河北省重型机械流体动力传输与控制重点实验室,河北秦皇岛066004;燕山大学机械工程学院,河北秦皇岛066004;燕山大学河北省重型机械流体动力传输与控制重点实验室,河北秦皇岛066004;燕山大学先进锻压成形技术与科学教育部重点实验室,河北秦皇岛066004;燕山大学河北省重型机械流体动力传输与控制重点实验室,河北秦皇岛066004;燕山大学机械工程学院,河北秦皇岛066004【正文语种】中文【中图分类】TH137;TP242【相关文献】1.基于Stewart平台的空间平面静态位置检测方法研究 [J], 周亮;马训鸣;刘亚洲;王磊;崔建鑫;杨振宇2.Gough-SteWart平台通用动力学反解分析 [J], 刘国军;郑淑涛;韩俊伟3.三自由度并联机器人机构位置反解和奇异位形研究 [J], 路娜;赵新华4.3-PRRU并联机器人位置反解和奇异位形的研究 [J], 刘家念;赵新华5.六自由度运动平台位置反解的建模与仿真研究 [J], 晁智强; 郭小牛; 刘相波; 韩寿松; 李华莹因版权原因,仅展示原文概要,查看原文内容请购买。
六自由度系统集成设计(一)

自由度:图中所示机构具有三个 自由度。可以从运动平台的平移 和转动六个运动参数中任选三个, 作为此机构的广义坐标。此机构 的作用主要是实现摆动,所以选 取欧拉角作为广义坐标。由作动 器1、2、3产生的转动的同时, 不可避免地产生平动牵连运动。
1 Stewart运动平台的概念
Generalized Stewart Platform
下铰并非在同一 个平面内
这是系统集成优 化设计的结果
2 Stewart运动平台的主要特点
并联机构的运动平台同时经由6根杆支撑,与串联的悬臂梁 相比,刚度大,而且结构稳定; 由于刚度大,并联机构较串联机构在相同的自重或体积下, 有高得多的承载能力; 串联机构的误差是各个关节误差的积累和放大,因而误差大、 精度低,并联机构的误差趋于平均化,因此误差小、精度高; 串联机构的驱动系统及传动系统大都放在运动着的大小臂上, 增加了系统的惯量,恶化了动力性能,而并联机构则很容易 将电机置于机座上,减小了运动负荷,动力性能好; 位置求解上,串联机构正解容易,但反解十分困难,而并联 机构正解困难,反解却非常容易。串联并联的“对偶”关系
2 Stewart运动平台的主要特
比较项目
点 串联机构
并联机构
工作空间 刚度
奇异性 负载能力
惯量 结构 精度 速度 加速度 正解 反解 动力学 控制 设计的复杂性 成本
大 低 有一些 低 大 简单 误差积累 较低 较低 容易 困难 复杂 较简单 低 较高
小 高 多 高 小 复杂 误差平均化 较高 较高 困难 通常容易 非常复杂 复杂 高 较低
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
对实心结构和中 空 结 构 进 行 分 析 可 知,实 心 平 台 强度大且承载力强,但 在 某 些 特 殊 场 合,其 质 量 太 大, 无 法 满 足 载 荷 限 制 条 件 ;中 空 结 构 刚 度 大 且 质 量 轻 ,在
某 些 场 合 比 实 心 结 构 更 适 合 ;如 果 强 度 达 到 使 用 要 求 , 则 可 以 减 轻 结 构 重 量 ,降 低 成 本 。
拟驾驶舱连接,模拟驾驶舱本身可以承受一部分变形, 在材料允许的变形范 围 内;最 大 的 应 力 集 中 在 上 平 台
因而不需考虑其变形 问 题;可 伸 缩 杆 是 整 个 结 构 中 最 与支杆的铰接点处,但 最 大 应 力 仍 未 超 出 钢 材 的 屈 服
薄弱的环节,容易 出 现 应 力 过 大 导 致 的 失 效。 整 个 结 极限,结构满足设计要求。
在 ANSYS软件 中,通 过 设 置 边 界 条 件 和 相 关 的 参数进行仿真,可以 得 到 平 台 结 构 在 加 载 状 态 下 的 受 力 及 变 形 情 况 ,如 图 5~ 图 8 所 示 。
图 4 拟 定 分 析 流 程 图
图 5 实 心 平 台 极 限 位 置 变 形 图
图 6 中 空 平 台 极 限 位 置 变 形 图
[5] 曹辉,严新平,吴超仲,等.基 于 动 力 学 分 析 的 驾 驶 模 拟 器 运动仿真算 法 [J].武 汉 理 工 大 学 学 报,2005,29(3):78-
81. [6] Peter R Grant,Lloyd D Reid. Motion washout filter
tuning:rules and requirements [J].Journal of Aircraft, 1997,34(2):145-151.
第 5 期 (总 第 186 期 ) 2014 年 10 月
机械工程与自动化 MECHANICAL ENGINEERING & AUTOMATION
文 章 编 号 :1672-6413(2014)05-0011-03
No.5 Oct.
Stewart六自由度动感平台结构优化设计
赵洁修,胡德计
(天津职业技术师范大学 机械工程学院,天津 300222)
图 1 铰 链 空 间 布 局 图
根据 实 际 使 用 要 求,上、下 平 台 均 采 用 铸 铁 材 料。 平台的设计中 一 般 考 虑 如 下 参 数:承 载 质 量;X,Y,Z 三向的极限位移量以及绕各轴的极限旋转角度。机构 中 的 油 缸 、连 接 铰 链 等 为 标 准 零 部 件 ,根 据 实 际 给 定 参 数及本设计面对的大 型 车 辆 模 拟 实 际 工 况,选 择 合 适 的型号;上、下平台是 非 标 准 件,其 尺 寸 及 参 数 依 据 实 际 需 求 进 行 设 计 ,此 处 以 某 型 模 拟 器 的 参 数 为 参 考 ,应 用三维造型软件,设 计 出 并 联 机 构 的 三 维 立 体 效 果 图 如图3所示。
Optimal Design of Stewart Platform with Six Degree of Freedom
ZHAO Jie-xiu,HU De-ji
(School of Mechanical Engineering,Tianjin University of Technology and Education,Tianjin 300222,China) Abstract:Stewart platform,due to its characteristic of easy to realize six degree of freedom,is widely used in aircraft simulators and large vehicle driving simulators.It can realize the proprioceptive simulation of driving.Currently,there are two typical structures of the movable platform:the solid model and the hollow model.This paper will adopt finite element method to analyze the two models. Through building 3D model,digital reconstruction,analyzing in ANSYS,we will come up with an optimal design of the platform. Key words:Stewart platform;finite element method;proprioceptive simulation;optimal design
0 引 言 Stewart并联机构 由 2 个 平 台 和 可 伸 缩 旋 转 的 6
根支杆组成,下 平 台 固 定,上 平 台 与 模 拟 驾 驶 舱 相 连 接 。 平 台 在 空 间 具 有 6 个 自 由 度 ,结 构 灵 活 ,空 间 占 用 面积小,并且具有错误并行非累加的特点[1],故其 广 泛 地应用于机器人结构及许多大型的模拟器中。
变形与应力出现的位置均不影响实际使用。采用中空
结构平台可以满足实 际 的 使 用 要 求,达 到 预 期 的 设 计
效 果 ,因 而 ,本 例 中 的 模 拟 器 可 以 采 用 中 空 结 构 的 上 平
台,既符合使用要求,又 可 以 使 整 体 质 量 减 轻,达 到 节
约成本的目的。
表 1 中 空 平 台 三 极 限 位 置 的 最 大 应 力 、形 变 及 发 生 位 置
所计算的 极限位置
最大形变量及位置
最大形变量 μm
位置
最大应力及位置
最大应力 MPa
位置
上平台 X 向 极限位置
3.63 3.23
上平台中部 支杆中上部
6.62
上平台与支杆 铰接处
上平台Y 向 极限位置
2.82 2.51
上平台中部 支杆中上部
5.35
上平台与支杆 铰接处
上平台倾斜 15°极 限 位 置
本文分析的 Stewart机 构 面 向 驾 驶 模 拟 系 统,因 而根据用途,构建其 力 学 模 型 并 为 后 续 计 算 选 定 边 界 条件。Stewart并联机构的 6 个 可 以 自 由 伸 缩 的 杆 件 由 伺 服 电 机 驱 动 伺 服 液 压 缸 进 行 伸 缩 旋 转 ,相 互 配 合 , 完成动平台的任意动作。杆件与2个平台以万向铰链 铰接在一起,铰链 空 间 上 呈 三 角 形 布 局。 铰 链 的 布 局 如 图 1 所 示 ,机 构 的 结 构 示 意 图 如 图 2 所 示 。
构的可靠性取决 于 支 杆 的 可 靠 性[6],ห้องสมุดไป่ตู้ 果 支 杆 在 极 限
通过仿真,我们以 表 格 的 方 式 给 出 平 台 在 极 限 位
2014年第5期 机 械 工 程 与 自 动 化
· 13 ·
置 的 分 析 结 果 ,表 1 为 中 空 平 台 的 分 析 结 果 ,其 最 大 的
3.04 2.70
上平台中部 支杆中上部
4.71
上平台与支杆 铰接处
参考文献:
[1] Nguyen C C,Antrazi S S,Park J-Y,et al.Trajectory planning and control of a Stewart platform-based end- effector with passive compliance for part assembly[J]. Journal of Intelligent and Robotic Systems,1992,6:263- 281.
图 7 实 心 平 台 极 限 位 置 应 力 图
图 8 中 空 平 台 极 限 位 置 应 力 图
由图5~ 图 8 可 见,最 大 的 变 形 出 现 在 上 平 台 中 位置不出现过大变形 或 者 拉 压 失 效,则 整 个 结 构 可 以
部,此处容易出现 过 大 变 形 引 起 的 失 效。 但 此 处 与 模 认为是满足使用要 求 的。 通 过 软 件 分 析,最 大 形 变 量
图 2 机 构 的 结 构 示 意 图 图 3 并 联 机 构 的 三 维 立 体 效 果 图
建好的三维模型,想 要 在 有 限 元 软 件 中 进 行 数 值
分 析 ,还 需 要 进 行 结 构 简 化 和 数 据 前 处 理 ,即 网 格 划 分
收 稿 日 期 :2014-02-17; 修 回 日 期 :2014-04-17 作者简介:赵洁修 (1988-),女,河北秦皇岛人,在读硕士研究生,研究方向:数控仿真。
为了寻找 最 优 化 的 平 台 结 构,本 文 采 用 ANSYS 软件对两种模型处于3个极限位置时的受力状态进行 仿 真,即:X 和Y 向300mm 位置和转角15°位置[5]。3 个极限位置 上,杆 件 及 平 台 受 力 最 大,最 容 易 出 现 断 裂 、过 大 的 结 构 形 变 等 失 效 。 而 除 此 以 外 的 位 置 ,受 力 及 变 形 均 小 于 此 情 况 ,因 而 ,针 对 极 限 位 置 进 行 静 力 分 析,找出两种结构的 薄 弱 环 节,即 易 失 效 点,可 指 导 后 续的结构优化。 3 结 构 优 化 分 析 结 果 及 结 论