六自由度运动平台方案设计报告
《2024年新型六自由度运动模拟器的性能分析与设计》范文

《新型六自由度运动模拟器的性能分析与设计》篇一一、引言六自由度运动模拟器,以其精确模拟多种复杂动态环境的能力,正逐渐在航空航天、汽车驾驶模拟、虚拟现实、医疗康复等领域展现出广泛的应用前景。
本文将着重对新型六自由度运动模拟器的性能进行分析,并对其设计方法进行详细探讨。
二、新型六自由度运动模拟器性能分析(一)运动性能新型六自由度运动模拟器可以实现平动、转动和复杂运动的模拟,包括前后左右移动、俯仰、翻滚和偏航等。
通过精确的传感器和控制系统,运动模拟器能够准确反映动态环境的真实状态,提高模拟的真实性和可靠性。
(二)动力学性能该模拟器在动力学性能方面具有出色的表现。
其精确的动力学模型能够模拟出复杂的动态过程,为科学研究提供真实可靠的实验数据。
此外,该模拟器还具有高响应速度和低误差率的特点,能够快速响应外部环境的改变,保证模拟的实时性。
(三)环境适应性新型六自由度运动模拟器具有较好的环境适应性。
其结构设计灵活,可根据不同的应用场景进行定制化设计。
同时,该模拟器还具有较高的耐久性和稳定性,能够在各种复杂环境下长时间稳定运行。
三、新型六自由度运动模拟器的设计(一)硬件设计硬件设计是新型六自由度运动模拟器的关键部分。
设计过程中,需要选择合适的电机、传感器和控制模块等部件。
其中,电机是驱动运动模拟器进行各种运动的核心部件,传感器则用于实时监测运动状态,控制模块则负责协调各部件的工作。
此外,还需考虑硬件的布局和结构,以保证其稳定性和可靠性。
(二)软件设计软件设计是实现新型六自由度运动模拟器各项功能的关键。
在软件设计中,需要建立精确的动力学模型,以反映动态环境的真实状态。
此外,还需设计合理的控制算法和界面交互程序,以实现模拟器的精确控制和人机交互。
在编程过程中,应采用模块化设计思想,以提高代码的可读性和可维护性。
(三)系统集成与测试系统集成与测试是新型六自由度运动模拟器设计的最后一步。
在系统集成过程中,需要将硬件和软件各部分进行整合,确保其协同工作。
六自由度飞行模拟器运动系统设计研究

六自由度飞行模拟器运动系统设计研究一、内容概要随着科技的发展,飞行模拟器在航空领域的应用越来越广泛。
六自由度飞行模拟器作为一种高性能的飞行模拟器,其运动系统的设计对于提高飞行模拟器的性能和用户体验具有重要意义。
本文主要研究了六自由度飞行模拟器运动系统的设计方案,包括运动控制系统、传感器系统、执行器系统等方面的设计。
通过对现有技术的分析和对未来发展趋势的预测,提出了一种适用于六自由度飞行模拟器的运动系统设计方案。
首先本文介绍了六自由度飞行模拟器的基本原理和结构特点,为后续的运动系统设计提供了理论基础。
然后详细阐述了运动控制系统的设计,包括控制策略的选择、控制器的设计和算法优化等方面。
在此基础上,本文探讨了传感器系统的设计,重点关注了惯性导航系统、力矩传感器和加速度计等关键传感器的选型和布局。
此外本文还对执行器系统进行了深入研究,包括电动缸、舵机和驱动器等关键部件的设计和优化。
为了提高飞行模拟器的稳定性和精度,本文还对运动系统的标定方法进行了研究,提出了一种基于模型预测控制(MPC)的自适应标定方法。
本文对所提出的六自由度飞行模拟器运动系统设计方案进行了验证和实验,结果表明所设计的系统能够满足飞行模拟器的需求,具有良好的性能和稳定性。
本文通过研究六自由度飞行模拟器运动系统的设计方案,为提高飞行模拟器的性能和用户体验提供了有益的参考。
在未来的研究中,可以进一步优化运动系统的设计方案,以满足不同应用场景的需求。
1.1 研究背景和意义飞行模拟器技术在现代航空、航天等领域具有重要的应用价值,它可以为飞行员提供真实的飞行环境和训练条件,帮助他们熟悉各种飞行操作和应对紧急情况。
六自由度飞行模拟器是一种高级的飞行模拟器,它可以模拟飞机在空间中的六个自由度(平移、俯仰、滚转、偏航)的运动,为飞行员提供更加真实和全面的飞行体验。
然而目前市场上的六自由度飞行模拟器运动系统存在一些问题,如运动稳定性差、响应速度慢、精度不高等,这些问题限制了飞行模拟器的实际应用效果。
六自由度运动平台方案设计报告doc
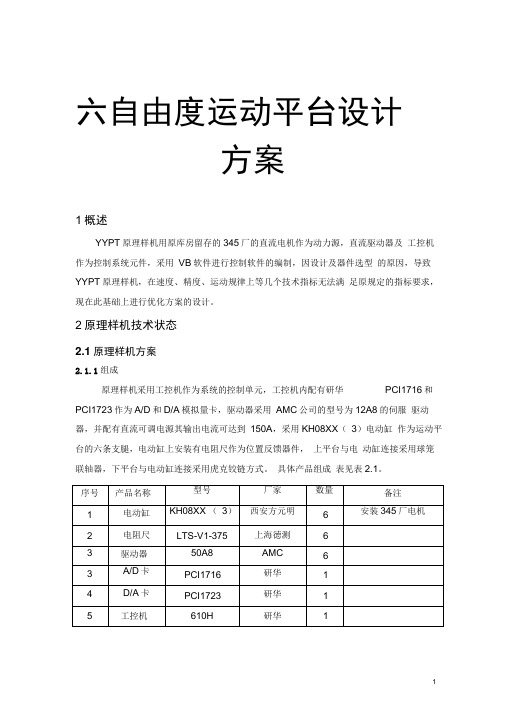
1概述YYPT原理样机用原库房留存的345厂的直流电机作为动力源,直流驱动器及工控机作为控制系统元件,采用VB软件进行控制软件的编制,因设计及器件选型的原因,导致YYPT原理样机,在速度、精度、运动规律上等几个技术指标无法满足原规定的指标要求,现在此基础上进行优化方案的设计。
2 原理样机技术状态2.1 原理样机方案2.1.1 组成原理样机采用工控机作为系统的控制单元,工控机内配有研华PCI1716和PCI1723作为A/D和D/A模拟量卡,驱动器采用AMC公司的型号为12A8的伺服驱动器,并配有直流可调电源其输出电流可达到150A,采用KH08XX(3)电动缸作为运动平台的六条支腿,电动缸上安装有电阻尺作为位置反馈器件,上平台与电动缸连接采用球笼联轴器,下平台与电动缸连接采用虎克铰链方式。
具体产品组成表见表2.1。
2.1.2 结构方案六自由度运动平台是由六条电动缸通过虎克铰链和球笼万向节联轴器将上、下两个平台连接而成,下平台固定在基础上,借助六条电动缸的伸缩运动,完成上平台在三维空间六个自由度(X,Y,Z,α,β,γ)的运动,从而可以模拟出各种空间运动姿态。
图1 六自由度平台外形图a )球笼联轴器(如图2所示)采用球笼铰链与上平面连接。
球笼铰链结构简单、体积小、运转灵活、易于维护。
初选球笼铰链型号BJB (JB/T6139-1992),公称转矩Tn=2000N/m ,工作角度40度,外径D=68mm ,轴孔选用圆柱孔d=24mm ,总长度L1=148mm ,转动惯量为0.00008kg.m ²,重量5kg 。
球笼联轴器电动缸虎克铰链上动平台下静平台图2 球笼联轴器b)虎克铰链(如图3所示)采用虎克铰链与下平面连接。
万向节铰链传动效率高,允许两轴间的角位移大,适用于有大角位移的两轴之间的连接,一般两轴的轴间角最大可达35º~45º,噪音小,对润滑要求不高,传递转矩大,而且使用可靠,因此获得广泛的应用。
《2024年新型六自由度运动模拟器的性能分析与设计》范文

《新型六自由度运动模拟器的性能分析与设计》篇一一、引言随着科技的不断进步,模拟器技术在众多领域得到了广泛的应用。
其中,六自由度(6DOF)运动模拟器作为一种高级的模拟系统,在军事、航天、汽车、医疗等多个领域发挥着重要作用。
本文将针对新型六自由度运动模拟器的性能进行分析,并探讨其设计思路和方法。
二、六自由度运动模拟器概述六自由度运动模拟器是一种能够模拟三维空间中六个方向上运动特性的设备,包括沿X、Y、Z轴的平移以及绕这三个轴的旋转运动。
它能够模拟各种复杂环境下的运动状态,为实验和训练提供逼真的体验。
三、新型六自由度运动模拟器的性能分析(一)高精度运动控制新型六自由度运动模拟器采用先进的控制系统和传感器技术,能够实现高精度的运动控制。
通过精确的算法和反馈机制,模拟器能够准确模拟各种复杂环境下的运动状态,提高实验和训练的准确性。
(二)大范围运动空间新型六自由度运动模拟器具有较大的运动空间,能够满足不同场景下的模拟需求。
通过优化机械结构和控制系统,模拟器能够在较大的空间范围内实现精确的运动控制。
(三)高稳定性与可靠性新型六自由度运动模拟器采用高强度材料和先进的制造工艺,具有较高的稳定性和可靠性。
同时,通过优化设计和严格的测试流程,确保模拟器在长时间运行过程中能够保持优良的性能。
(四)易于集成与维护新型六自由度运动模拟器具有良好的集成性和维护性。
通过采用模块化设计,方便用户进行安装、调试和维修。
同时,提供友好的用户界面和丰富的接口,方便与其他系统的集成。
四、新型六自由度运动模拟器的设计思路与方法(一)需求分析在进行新型六自由度运动模拟器的设计之前,首先要进行需求分析。
明确模拟器的应用场景、使用人群、所需功能等关键要素,为后续的设计提供依据。
(二)总体设计根据需求分析结果,进行总体设计。
确定模拟器的结构形式、机械布局、控制系统等关键要素。
同时,考虑模块化设计,方便后续的安装、调试和维护。
(三)硬件设计硬件设计是新型六自由度运动模拟器设计的关键环节。
六自由度运动平台设计方案
六自由度运动平台设计方案1概述YYPT原理样机用原库房留存的345厂的直流电机作为动力源,直流驱动器及工控机作为控制系统元件,采用VB软件进行控制软件的编制,因设计及器件选型的原因,导致YYPT原理样机,在速度、精度、运动规律上等几个技术指标无法满足原规定的指标要求,现在此基础上进行优化方案的设计。
2原理样机技术状态2.1原理样机方案2.1.1组成原理样机采用工控机作为系统的控制单元,工控机内配有研华PCI1716和PCI1723作为A/D和D/A模拟量卡,驱动器采用AMC公司的型号为12A8的伺服驱动器,并配有直流可调电源其输出电流可达到150A,采用KH08XX(3)电动缸作为运动平台的六条支腿,电动缸上安装有电阻尺作为位置反馈器件,上平台与电动缸连接采用球笼联轴器,下平台与电动缸连接采用虎克铰链方式。
具体产品组成表见表2.1。
2.1.2结构方案六自由度运动平台是由六条电动缸通过虎克铰链和球笼万向节联轴器将上、下两个平台连接而成,下平台固定在基础上,借助六条电动缸的伸缩运动,完成上平台在三维空间六个自由度(X,丫,Z,a,B, 丫)的运动,从而可以模拟出各种空间运动姿态。
图1六自由度平台外形图a)球笼联轴器(如图2所示)采用球笼铰链与上平面连接。
球笼铰链结构简单、体积小、运转灵活、易于维护。
初选球笼铰链型号BJB (JB/T6139-1992),公称转矩Tn=2000N/m,工作角度40度,外径D=68mm,轴孔选用圆柱孔d=24mm,总长度L1=148mm ,转动惯量为0.00008kg.m2,重量5kg。
图2球笼联轴器b)虎克铰链(如图3所示)采用虎克铰链与下平面连接。
万向节铰链传动效率高,允许两轴间的角位移大,适用于有大角位移的两轴之间的连接,一般两轴的轴间角最大可达35o~45o,噪音小,对润滑要求不高,传递转矩大,而且使用可靠,因此获得广泛的应用。
图3虎克铰链F固定板的连接(如图4所示)F 固定板与电动缸用法兰连接初选深沟球轴承型号61808 (GB/T276-1994),额定载荷 Cr=5.1kN ,外径D=52mm ,轴承孔选用 d=40mm ,宽 B=7mm ,重量 0.26kg 。
《2024年新型六自由度运动模拟器的性能分析与设计》范文
《新型六自由度运动模拟器的性能分析与设计》篇一一、引言随着科技的不断进步,六自由度(6-DOF)运动模拟器在众多领域中扮演着越来越重要的角色。
它不仅在军事模拟训练、航空航天、机器人技术等领域得到广泛应用,而且在娱乐、体育以及教育领域也展现出了巨大的潜力。
本文旨在深入分析新型六自由度运动模拟器的性能与设计,以期为相关研究与应用提供参考。
二、新型六自由度运动模拟器概述新型六自由度运动模拟器是一种能够模拟三维空间中六个方向上运动状态的设备。
这六个方向包括沿X、Y、Z轴的平移运动以及绕这三个轴的旋转运动。
该模拟器通过高精度的传感器和控制系统,实现对运动状态的实时监测与控制,从而为使用者提供沉浸式的体验。
三、性能分析(一)精度与稳定性新型六自由度运动模拟器采用先进的传感器技术和高精度的控制系统,实现了高精度的运动模拟。
其误差范围极小,能够满足各种应用场景的需求。
同时,该模拟器具有很高的稳定性,能够在长时间运行过程中保持精确的运动状态。
(二)实时性与响应速度该模拟器具有极高的实时性和响应速度。
传感器能够实时监测运动状态,控制系统能够迅速作出反应,使模拟器在短时间内达到目标状态。
这种快速响应的能力使得模拟器在各种应用中都能表现出色。
(三)多功能性新型六自由度运动模拟器具有很高的多功能性。
通过更换不同的附件和软件,可以实现多种不同的应用,如军事模拟训练、航空航天模拟、机器人技术测试、娱乐游戏等。
这使得该模拟器具有很高的灵活性和适用性。
四、设计(一)硬件设计新型六自由度运动模拟器的硬件设计主要包括传感器、执行机构和控制单元。
传感器用于实时监测运动状态,执行机构负责实现运动,控制单元则负责整个系统的控制和协调。
硬件设计需要考虑到精度、稳定性、实时性以及耐用性等因素。
(二)软件设计软件设计是新型六自由度运动模拟器的关键部分。
软件需要实现对传感器数据的处理、控制算法的实现以及与执行机构的通信等功能。
同时,软件还需要具备友好的人机交互界面,以便用户能够方便地使用和操作模拟器。
六自由度运动平台驱动系统驱动系统设计计算报告
六自由度运动平台驱动系统设计计算报告编写校对审核批准2019年11月目录1.六自由度运动平台电机选型计算 (2)1.1空间几何参数 (2)1.2六自由度运动坐标系与数学模型 (2)1.3七自由度平台最大线位移和最大角位移仿真分析 (3)1.4电动缸推(拉)力、缸速的计算机仿真分析 (3)1.5交流伺服系统 (4)1.6电动缸的缸速、推拉力和控制精度 (6)2.第七自由度电机的选型计算 (7)2.1设计初始条件 (7)2.2运动规律 (8)2.3伺服电机的运动规律 (8)2.4电机数量计算 (9)2.5.1倾覆力矩与滚轮安全系数 (9)2.5.2偏转力矩与滚轮安全系数 (10)2.5.3垂向载荷与滚轮安全系数 (10)2.6几种典型工况对应的电机输出最大转速最大扭矩 (10)2.7基本结论 (12)3.系统的安全保护措施 (12)4.运动指标测试 (13)I1.六自由度运动平台电机选型计算1.1空间几何参数依据运动指标估算了运动平台以上的总载荷(4.5t)和转动惯量,经过运动学、动力学仿真分析,根据平台的三个线位移和三个角位移确定了电动缸的几何尺寸、电动缸的行程以及并联机构的空间几何参数:●运动机构上三个铰支座的中心线均以120°的圆心角均布分布在直径为2.4m的圆周上;●下平台上三个铰支座的中心线均以120°的圆心角均匀分布在直径为3.4m的圆周上;●平台停机高度2.216m;●平台处于最低位置时,电动缸与地面夹角47.9°;●运动平台厚度0.4m;●电动缸行程0.94m。
1.2六自由度运动坐标系与数学模型在六缸支撑的运动系统中,可定义运动坐标系和固定坐标系,如图1-1所示。
图1-1 六自由度运动平台坐标定义运动坐标系固联在运动平台上,其X-Y平面位于六台电动缸上耳轴中心所在平面内,Z轴垂直向下,(右手系)坐标系原点位于上三点所在圆的圆心。
固定坐标系固联在固定平台上,其X-Y平面位于六台电动缸下耳轴中心所在平面内,Z轴垂直向下(右手系)坐标原点位于下三点所在圆的圆心。
六自由度机械平台设计方案
六自由度机械平台设计方案
1. 简介
本文档旨在提供一个六自由度机械平台的设计方案,为读者提供一个了解该机械平台的整体结构和功能的概述。
2. 设计要求
在设计六自由度机械平台时,需要考虑以下要求:
- 高精度和高稳定性;
- 具有较大的工作空间;
- 快速和准确的运动;
- 可以承受适应各种工作环境的负载。
3. 设计方案
为满足上述要求,本设计方案包括以下几个关键方面:
3.1 结构设计
- 采用六个自由度,包括三个旋转自由度和三个平移自由度;
- 结构采用刚性框架设计,以确保稳定性和刚性;
- 使用高强度材料来提供足够的负载能力。
3.2 驱动系统
- 使用先进的电机和驱动器来实现快速和准确的运动;
- 采用闭环控制系统以确保精确的位置控制;
- 考虑使用减震和防护装置来减小外界干扰对机械平台运动的影响。
3.3 传感器系统
- 配备合适的传感器来监测机械平台的位置和状态;
- 包括位置传感器、力传感器和姿态传感器等。
3.4 控制系统
- 设计一套先进的控制系统以实现对机械平台的准确控制;
- 使用合适的控制算法来实现运动轨迹规划和运动控制。
4. 总结
本文档提供了一个六自由度机械平台设计的概述,包括结构设计、驱动系统、传感器系统和控制系统等关键方面。
希望通过该设计方案能够满足高精度和高稳定性的需求,并能在各种工作环境下快速和准确地运动。
六自由度平台实验报告
六⾃由度平台实验报告六⾃由度平台实验报告机械电⼦⼯程系张梦辉21525074⼀、实验简介实验对象为⼀个六⾃由度平台,每个⾃由度的运动均由⼀个永磁式直流电机驱动,实验要求对其中⼀个电动缸进⾏位置控制,位置由⼀个滑变电阻式的位移传感器反馈回的电压信号确定,驱动则是通过研华的PCI1716L的数字输出实现,控制软件采⽤Labview8.6。
⼆、实验装置PC机⼀台研华PCI1716L多功能板卡⼀个PCI总线⼀根固态继电器板⼀块220V AC—24VDC变压器三个直流电动机六个三、实验台介绍六⾃由度运动平台是由六⽀电动缸,上、下各六只万向铰链和上、下两个平台组成,下平台固定在基础上,借助六只电动缸的伸缩运动,完成上平台在空间六个⾃由度(α,β,γ,X,Y,Z)的运动,从⽽可以模拟出各种空间运动姿态。
六⾃由度运动平台涉及到机械、液压、电⽓、控制、计算机、传感器,空间运动数学模型、实时信号传输处理等⼀系列⾼科技领域,因此六⾃由度运动平台是机电控制领域⽔平的标志性象征。
主要包括平台的空间运动机构、空间运动模型、机电控制系统。
本实验台,PC机作为板卡和⼈的接⼝,通过在PC机上编程来控制板卡发送数字信号和采集位置信号。
将PCI多功能卡设置为设备0,选择PCI板卡的模拟信号输⼊⼝AI4⼝来采集2号缸的位置信号,通过PORT1号⼝来控制2号缸对应直流电机的正转、反转和停⽌。
通过数字信号输出⼝发送开关量来控制固态继电器的开和闭,固态继电器导通的话,则接通直流电动机,直流电动机开始运⾏,这时候,电动缸就会朝着指定⽅向运⾏,并且到达指定的位置。
实验中⽤到的接⼝的说明:AI0-AI5 模拟信号输⼊⼝,⽤来采集六个缸的位置信号;AIGND 模拟信号公共地DO0-DO11 数字信号输出⼝,⽤来控制六个缸的运动(其中DO11-DO10 分别控制1号缸的正反转DO09-DO08 分别控制2号缸的正反转DO07-DO06 分别控制3号缸的正反转DO05-DO04 分别控制4号缸的正反转DO03-DO02 分别控制5号缸的正反转DO01-DO00 分别控制6号缸的正反转DGND 数字输出信号公共地PCI1716L板卡端⼝四、实验过程Labview实验程序:1、数字信号输出程序段通过调⽤PCI板卡的例⼦程序:DioWritePortWord.vi程序来发送数字信号,当控制⼦为1时,通过板卡数字信号输出⼝DO8⼝发送1,这样2号缸的电机发转,电动缸退回;当控制字为2时,通过数字信号输出⼝DO9发送1,这样2号缸的电机正转,电动缸前进。
六自由度微动平台机构设计
摘要摘要本文对一种新型的6-(P-2P-S)并联机器人的精度进行了分析,这种机器人是由Stewart平台经过变异得到的。
介绍了该并联机器人的特点,利用空间机构学理论分析了机构的位置正反解,并分析了该机构在正交位姿的运动解耦性能。
基于该并联机器人的结构约束,研究了该机构的工作空间,并定量分析了该机构参数对工作空间体积大小的影响。
定义了线速度各向同性性能评价指标,并给出各向同性性能指标在工作空间内的分布情况。
采用对并联机构运动学方程取微分的方法求得各主要误差源和末端误差的映射关系,使用叠加原理获得了在综合多种误差影响因素作用下并联机构的几何误差模型,利用蒙特卡洛技术对终端平台误差进行了分析。
采用绝对误差敏感度和误差方向敏感度这两个误差评价指标,将主要误差影响因素对机构终端误差的影响进行了分析。
以该并联机构的全域各向同性性能指标和全域综合误差指标为依据对该机构进行了参数设计。
关键词并联机器人;正交结构;性能指标;几何误差;蒙特卡洛方法燕山大学工学硕士学位论文AbstractThe thesis focuses on the accuracy research on a novel 6-(P-2P-S) orthogonal parallel robot, the robot is developed based on the Stewart platform mechanism.Its layout feature is presented according to the previous research results. The forward and reverse position are established by using spatial mechanisms. The paper also shows that the novel parallel robot is characterized by decoupling at its orthogonal position.Base on the architecture constraints, its workspace is investigated. The effects of the design parameters to the workspace volume are studied quantitatively.Kinematics transmission isotropy evaluation criteria is defined. The distribution of the defined evaluation criteria are presented on the workspace.To get the mapping relationship between the influencing factors and the end error of the 6-(P-2P-S) parallel robot, the kinematics equation are differentiated. The analytic expression of the geometric error of the 6-(P-2P-S) parallel robot is obtained by using the superposition theorem and comprehensively considering the influencing factor. The distribution on terminal platform errors is discussed using Monte-Carlo method. By comprehensively considering the two evaluation indicators: absolute error sensitivity and error isotropy sensitivity, the influence of the influencing factor effecting on the end effector is analyzed.Based on the workspace of a novel 6-(P-2P-S) parallel robot, geometry parameter of the parallel mechanism is optimized which depend on the glob kinematics and the glob equal errors.Keywords Parallel robot; Orthogonal structure; Performance evaluation criteria;Geometric error; Monte-Carlo method目录目录摘要 (Ⅰ)Abstract (Ⅱ)第 1 章绪论 (1)1.1并联机器人概述 (1)1.2并联机器人发展状况 (2)1.3本论文的选题意义及主要研究内容 (8)第2章新型6-(P-2P-S)并联机器人的位置分析 (10)2.1概述 (10)2.2 6-(P-2P-S)并联机器人的机构描述 (10)2.2.1结构布局 (10)2.2.2机构特点 (11)2.3 6-(P-2P-S)并联机器人的位置分析 (12)2.3.1动平台姿态描述 (13)2.3.2位置分析 (14)2.3.3正交位姿解耦分析 (17)2.4本章小结 (18)第3章新型6-(P-2P-S)并联机器人工作空间分析 (20)3.1概述 (20)3.2工作空间定义 (20)3.3工作空间分析 (22)3.3.1 约束分析 (22)3.3.2 工作空间的搜索方法 (23)3.3.3 工作空间形状分析 (26)3.4 结构尺寸对工作空间的影响 (28)燕山大学工学硕士学位论文3.5 本章小结 (30)第4章新型6-(P-2P-S)并联机器人的运动学传递性能分析 (31)4.1概述 (31)4.2运动学传递性能分析 (31)4.2.1 雅可比矩阵的求解 (31)4.2.2 运动学传递各向同性性能评价指标 (33)4.2.3正交位姿时运动学传递各向同性性能分析 (39)4.3本章小结 (40)第5章新型6-(P-2P-S)并联机器人的精度分析 (41)5.1 概述 (41)5.2 误差模型的建立 (41)5.2.1建模方法综述 (41)5.2.2模型建立 (42)5.2.3考虑间隙误差和垂直度误差的误差模型 (45)5.3 基于蒙特卡洛方法的误差分析 (46)5.3.1 制造误差随机量抽样 (46)5.3.2 球铰间隙误差随机量抽样 (46)5.3.3 误差的蒙特卡洛模拟 (47)5.4 误差的评价指标 (52)5.5 本章小结 (55)第6章6-(P-2P-S)并联机器人的结构参数设计 (56)6.1概述 (56)6.2并联机器人的结构参数设计 (56)6.2.1结构参数对工作空间大小的影响 (57)6.2.2结构参数对运动学性能的影响 (58)6.2.3结构参数对全域综合误差的影响 (59)6.3本章小结 (62)结论 (63)参考文献 (64)目录攻读硕士学位期间承担的科研任务与主要成果 (69)致谢 (70)作者简介 (71)燕山大学工学硕士学位论文第1章绪论第 1 章绪论1.1 并联机器人概述机器人的出现充分体现人类的创造力,是人类智慧的结晶。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1概述YYPT原理样机用原库房留存的345厂的直流电机作为动力源,直流驱动器及工控机作为控制系统元件,采用VB软件进行控制软件的编制,因设计及器件选型的原因,导致YYPT原理样机,在速度、精度、运动规律上等几个技术指标无法满足原规定的指标要求,现在此基础上进行优化方案的设计。
2 原理样机技术状态2.1 原理样机方案2.1.1 组成原理样机采用工控机作为系统的控制单元,工控机内配有研华PCI1716和PCI1723作为A/D和D/A模拟量卡,驱动器采用AMC公司的型号为12A8的伺服驱动器,并配有直流可调电源其输出电流可达到150A,采用KH08XX(3)电动缸作为运动平台的六条支腿,电动缸上安装有电阻尺作为位置反馈器件,上平台与电动缸连接采用球笼联轴器,下平台与电动缸连接采用虎克铰链方式。
具体产品组成表见表2.1。
2.1.2 结构方案六自由度运动平台是由六条电动缸通过虎克铰链和球笼万向节联轴器将上、下两个平台连接而成,下平台固定在基础上,借助六条电动缸的伸缩运动,完成上平台在三维空间六个自由度(X,Y,Z,α,β,γ)的运动,从而可以模拟出各种空间运动姿态。
图1 六自由度平台外形图a )球笼联轴器(如图2所示)采用球笼铰链与上平面连接。
球笼铰链结构简单、体积小、运转灵活、易于维护。
初选球笼铰链型号BJB (JB/T6139-1992),公称转矩Tn=2000N/m ,工作角度40度,外径D=68mm ,轴孔选用圆柱孔d=24mm ,总长度L1=148mm ,转动惯量为0.00008kg.m ²,重量5kg 。
球笼联轴器电动缸虎克铰链上动平台下静平台图2 球笼联轴器b)虎克铰链(如图3所示)采用虎克铰链与下平面连接。
万向节铰链传动效率高,允许两轴间的角位移大,适用于有大角位移的两轴之间的连接,一般两轴的轴间角最大可达35º~45º,噪音小,对润滑要求不高,传递转矩大,而且使用可靠,因此获得广泛的应用。
图3 虎克铰链下固定板的连接(如图4所示)图4 电动缸齿轮盖下固定板与电动缸用法兰连接。
初选深沟球轴承型号61808(GB/T276-1994),额定载荷Cr=5.1kN,外径D=52mm,轴承孔选用d=40mm,宽B=7mm,重量0.26kg。
初选深沟球轴承型号61802(GB/T276-1994),额定载荷Cr=2.1kN,外径D=24mm,轴承孔选用d=15mm,宽B=5mm,重量0.005kg。
上下结构(如图5所示)上铰点分布圆的半径:Ra=432mm下铰点分布圆的半径: Rb=625mm上铰相邻铰之间的距离:da=105mm下铰相邻铰之间的距离:db=120mm图5零位时作动器的长度:L2=777mmc)电动缸基于器部件复用的考虑,YYPT采用某项目3号电动作为运动平台动作执行终端,并可利用库存的六台DC24V直流有刷减速电机为之配套。
电动缸主要技术指标:1)最大推拉力不小于6000N;2)行走速度:18mm/s;3)最大行程:370mm;4)电动缸不自锁;直流有刷减速电机技术指标:1)电压范围:允许在20VDC~28VDC范围内工作;2)额定电压:24VDC;3)最大电流:在额定电压24VDC,额定负载12Nm条件下,电流≤40A。
4)最低转速:在额定电压24VDC,额定负载12Nm条件下,减速器输出转速不小于410rpm;5)额定负载:减速电机额定负载转矩为12Nm;6)工作方式:连续工作时间3min,间隙时间5min;7)电气接口:接口方式采用航空插座,航空插座型号:XCE22F4K1D1,电机出线与插座接线关系为“﹢”接1号针脚,“-”接2号针脚。
2.1.3控制方案控制软件采用位置反解算法,即通过平台的姿态反算六支电动缸的长度,通过PCI-1716接收电阻尺反馈的位置指令,根据计算出来的长度和反馈指令通过PCI-1723向驱动器发送模拟量速度指令,控制电动缸运动到指定长度。
2.2 原理样机技术参数1、超调问题:电动缸运行到位后超调现象比较严重,初步分析为电机特性较差引起的,但不排除算法及PID参数存在问题;2、台体结构晃动:当电动缸处于停止运动后,上台面人为晃动存在时,存在较大晃动量,初步分析原因为上平台使用的球笼联轴器间隙过大造成的。
3 优化方案针对原理样机中出现的问题,在尽量少修改原理样机结构的基础上对其进行优化,使其性能得到提高,并能完成六自由度的摇摆及联动等动作。
3.1 伺服系统优化针对原电机超调现象严重的现状,选择带反馈的伺服电机,使其和配套伺服驱动器构成小闭环,以降低上位控制软件的控制算法的难度。
按照现有结构允许的安装空间只能选择外径在70mm以内的伺服电机及减速器,初选松下MHMD042G1V功率为400W的交流伺服电机作为动力源。
按照电机输出扭矩需要,选择纽士达特型号为PF60-4的减速器,其外径为60mm*60mm,效率为90%。
则电机加减速器的输出扭矩为4.68N.m,转速为750rpm,丝杠导程为6mm,传动箱减速比为2,则电动缸的速度为37.5mm/s,推力不小于600kg 满足设计及使用要求。
3.2 控制系统优化根据原理样机中模拟量信号受干扰严重的现象,结合本次设计所选择伺服系统,采用脉冲+方向指令作为控制指令,故需要选择运动控制卡,根据公司现在使用的运动卡,选择深圳众为兴公司型号为ADT-856的运动控制卡作为主控卡。
3.3结构部分优化根据原理样机存在的问题,现将运动平台上平台与电缸连接部分也更改为虎克铰链,用以消除球笼联轴器带来的间隙。
虎克铰链示意图如图3.1所示:图3.1 虎克铰链示意图4 系统组成六自由度运动平台系统由测试软件部分系统、电气控制系统、动力电源系统、运动平台机械台体组成。
运动平台部分的组成结构示意图如图4.1所示。
用户界面负载运动伺服算法模块伺服驱动电动缸×6软件部分电控部分机械部分图4.1 系统组成框图软件部分主要包括用户界面程序、伺服算法程序、PID参数设置程序等。
用户界面程序采用VB或VC编写,界面友好,使用方便,可以接收用户的鼠标和键盘输入,设置工作的模式,运动的曲线类型等(正弦、连续、圆弧等),可以接收外部的指令,使平台在跟随状态下运行。
电控部分的作用是接收控制系统输出的指令数据,并将其传输给伺服驱动器,驱动器将信号放大后控制电机运动,进而带动电动缸运动,并最终使台体实现各种姿态。
包括工控机、运动控制卡、伺服驱动器、伺服电机、电阻尺及相关电器元件等。
机械部分用于支撑负载,包括上平台、上连接铰、下连接铰、电动缸、支撑架、底座等。
平台由电动缸驱动,进行横滚、偏航、俯仰三个姿态和X、Y、Z平移共六个自由度的运动。
5方案设计根据研究计划制定的研究目标及为下一个研究课题进行技术储备,本次设计出了满足原速度载荷要求的同时,在不增加外购件的前提下,进行了高速状态的设计,即传动箱内的齿轮可不带减速器直接连接伺服电机,使电动缸可以高速运动,但此时载荷降低,用以进行六自由度运动平台高速状态的研究。
5.1 机械结构设计本次结构设计在YYPT原理样机基础上进行设计,对原理样机中发现的问题进行优化,同时因为伺服系统更换导致相关结构部分进行更改。
主要更改部分有上平台与电动缸连接方式,电动缸传动箱,电动缸电机端传动齿轮。
5.1.1 上平台与电动缸连接方式原理样机上平台与电动缸连接采用球笼轴承,初样机采用虎克铰链方式进行连接,其更改后的外形图如图5.1所示:图5.1 上平台链接部分外形图5.1.2 电动缸传动箱本次设计选用PF60-4减速器,其减速器输出接口与原减速器相比有更改部分,主要更改部分为连接螺钉分布圆由直径77mm变为直径70mm,止口由直径30mm变为40mm,其他部分没有变化。
5.1.3电机齿轮本次设计选用PF60-4减速器,其输出轴直径为14mm小于原减速器输出轴直径18mm,同时考虑与减速器及伺服电机能够连接的共用性,所以需要对电机齿轮重新设计加工。
5.1.4 减速器根据选取电机设计需要,减速器选择山东纽士达特公司生产的PF60-4行星减速器,其主要性能参数如表5.1:表5.1 减速器性能参数5.2电控系统主要用于接收用户控制指令,并处理各种反馈信号,产生控制信号,控制伺服作动器做功,最终驱动运动平台完成各种自由度的运动。
本次设计仍采用位置反解算法,通过平台位置计算出各支电动缸的长度,采用运动控制卡作为运动平台的指令发送器件,根据计算出的结果发送6通道的脉冲+方向指令,用以控制6支电动缸进行运动;将伺服电机尾端的编码器数据通过伺服驱动器发送至上位机,通过解算编码器数据可知电动缸当前位置,电阻尺作为电动缸绝对位置检测,用以进行电动缸行程判读,作为电气限位保护使用。
其控制框图如图5.2所示:图5.2 控制框图主要控制元器件进行详细介绍: 5.2.1 伺服电机根据KH08XX (3)缸设计技术书可知,600kg 推力时丝杠需要扭矩为5.732N.m ,缸体部份及齿轮传动部分总效率按照70%计算时,齿轮传动部分减速比为2,减速器输出扭矩为4.1N.m 。
初步选配减速比为4,效率为90%的减速器,则电机端需要转矩 4.1== 1.14.i 40.9T T N m η≈⨯减电,选择松下型号为MHMD042G1V 的伺服电机,其主要参数见表5.2:表5.2 电机性能参数额定扭矩 1.3N.m瞬时最大扭矩 3.8N.m制动力矩不小于1.27N.m编码器20位增量式其转矩特性图如图5.3所示:图5.3 伺服电机转矩特性图5.2.2 伺服驱动器根据所选电机,配伺服驱动器型号为MBDHT2510,其主要性能参数见表5.3:表5.3 伺服驱动器性能参数名称参数备注电压220VAC±10% 50/60Hz控制方式位置控制模式速度控制模式转矩控制模式全闭环控制模式指令输入差分输入(脉冲+方向、脉冲+脉冲)输入频率500k(光电耦合器输入使用时)4M(长线驱动器输入使用时)电子齿轮比1/1000~1000以内选择深圳众为兴公司生产的六轴运动控制卡ADT856,其主要功能为输出六通道脉冲指令,接收六通道编码器反馈数据,其主要参数见表5.4:表5.4 运动控制卡性能参数图5.4 电气连接关系图5.3 控制软件及算法5.3.1 位置解算算法对于并联机构的六自由度平台在运动过程中,要保证运动的实时性和正确性,就需要通过对伸缩杠的精确控制来实现,这就需要引入六自由度平台的实时位置正反解算法。
所谓六自由度平台的位置反解,是指由运动平台的空间姿态求六个伸缩杠的伸缩量。
而六自由度的位置正解,是指有六个伸缩杠的伸缩量来求运动平台的空间姿态。
本次设计仍然采用位置反解的算法作为六自由度平台的位置算法。