IME12-04BNSZCOS工作原理
sickIME电感式接近开关
产品选型IME 电感式接近开关德国西克传感器欢迎来到全球传感器系统供应商基地SENSICK — 先进、强大的传感器技术的代名词。
SENSICK 自动化解决方案是优化和改进生产过程的理想选择。
今天,SICK 公司已在40多个国家建立了分支机构,拥有5000多名雇员,是世界上著名的传感器生产商之一。
现今,企业要发展,必须注重过程而不是功能;必须排除不灵活的工作过程,全面优化价值的生产过程。
因此,必须要有一个整体的,而不是单纯地解决某一问题的自动化解决方案。
作为全球自动化、安全技术、环境监测系统和自动识别系统等传感器领域的佼佼者,SICK 公司致力于发展工业过程的现代化和合理化。
优化全部生产过程作为一个有 60 多年传感器技术经验的公司,SICK 熟知工业生产各部分,可以为工业生产各个领域提供最优化的解决方案。
我们遍布全球的客户的成功经验都向我们传递了这样的一条信息:SICK 传感器的产品质量和产品的长期使用寿命是无可比拟的。
这是研发、生产、销售和服务的完全质量管理的结果。
质量永远是 SICK 公司的中心目标,每一个员工都把追求高质量作为他们的工作目标。
质量是关键SICK ——德国总部SICK —存在于很多行业 汽车行业食品处理、饮料和烟草工业 包装、印刷工业 物流和仓储系统 电子半导体工业 工业流程 环境测量 及其它很多行业产品范围工业用光电开关接近开关及磁性气缸开关 超声波传感器视觉传感器 旋转编码器 激光距离检测系统 光电安全保护装置 环境检测系统 自动化辨读系统 交通管理及监控系统2245标准型齐平安装 6 标准型非齐平安装 8 短小型齐平安装 10 短小型非齐平安装 12 增强型齐平安装,M8接头 14增强型齐平安装,M12接头 16增强型非齐平安装,M8接头 18增强短小型齐平安装 22增强型非齐平安装,M12接头 20 增强短小型非齐平安装 24标准型齐平安装 26 标准型非齐平安装 28 短小型齐平安装 30 短小型非齐平安装 32 增强型齐平安装 34 增强型非齐平安装 36 增强短小型齐平安装 38 增强短小型非齐平安装 40标准型齐平安装42标准型非齐平安装44短小型齐平安装46短小型非齐平安装48增强型齐平安装50增强型非齐平安装52增强短小型齐平安装54增强短小型非齐平安装56标准型齐平安装58标准型非齐平安装60短小型齐平安装62短小型非齐平安装64增强型齐平安装66增强型非齐平安装68增强短小型齐平安装70增强短小型非齐平安装72PVC连接电缆74无卤PUR连接电缆763安装支架78电感式接近开关由LC 振荡电路、信号触发器和开关放大器组成。
编码器的原理

(3)编码器+5V电源下降:是指+5V电源过低,
• 通常不能低于4.75V,造成过低的原因是供电电源故障或电源传送电缆阻值偏大而引 起损耗,这时需检修电源或更换电缆。
•
(4)绝对式编码器电池电压下降:这种故障通常有含义明确的报警,这时需更换
电池,如果参考点位置记忆丢失,还须执行重回参考点操作。
•
(5)编码器电缆屏蔽线未接或脱落:这会引入干扰信号,使波形不稳定,影响通
2 A B两相连接,用于正反向计数,用于判断正反方 向和测速
3 A B C 三相连接用于带参考位修正的判断测速 4 A -A B -B C -C连接,由于带有对称的负信
号连接电流对电缆的磁场贡献为零,衰减最小 ,抗干扰较强,可以进行长距离输出
如何进行正反向判断
• 因为A B两相相差90度,可以通过判断A相在先还是B相 在先,从而判断正转还是反转
编码器的故障及Leabharlann 修方法• (1)编码器本身故障:是指编码器本身元器件出现故障,导致其不能产生和输出正
确的波形。这种情况下需更换编码器或维修其内部器件。
• (2)编码器连接电缆故障:这种故障出现的几率
• 最高,维修中经常遇到,应是优先考虑的因素。通常为编码器电缆断路、短路或接 触不良,这时需更换电缆或接头。还应特别注意是否是由于电缆固定不紧,造成松 动引起开焊或断路,这时需卡紧电缆。
信的准确性,进口泵必须保证屏蔽线可靠的焊接及接地。
•
(6)编码器安装松动:这种故障会影响位置控制精度,造成停止和移动中位置偏
差量超差,甚至刚一开机即产生伺服系统过载报警,请特别注意。
• (7)光栅污染:这会使信号输出幅度下降,必须用脱脂棉沾无水酒精轻轻擦除油污
IME12电感式接近开关选型手册(中文版)
工 业 传 感 器
30g,11ms/10-55Hz,1mm -25℃... +75℃ 铜镀镍,塑料(PA6) Typ. 12 Nm
cULus Listed
3)Sr 4)符合标准EN60529
5)螺纹直径x螺距(mm) 6)短路保护(脉冲)
修正因素
下列为参考数值,实际中因型号的不同而不同
钢铁(ST37) 不锈钢(V2A) 铝(实心) 铜(Cu)
订货号
1 040 776 1 040 778 1 040 772 1 040 774 1 040 768 1 040 770 1 040 764 1 040 766
工业传感器 231
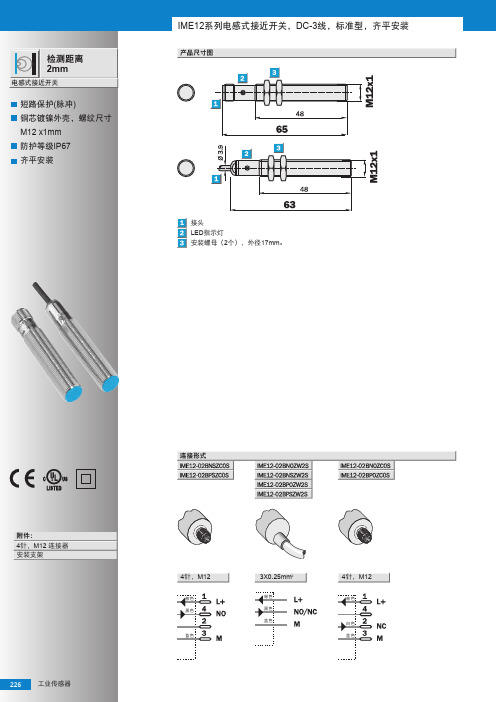
检测范围 8mm
电感式接近开关
感应范围增强 短路保护(脉冲) 铜芯镀镍外壳,螺纹尺寸 M12 x1mm 防护等级IP67 非齐平安装
4针,M12
棕色 黑色
蓝色
3X0.25mm2
棕色 黑色 蓝色
4针,M12
棕色
白色 蓝色
技术资料
检测距离S n 电线配置方式 工作电压Vs 脉动波纹Upp 电压降Ud 空载电流 工作电流Ia 时间延迟tv 开关滞后H 重复精度 温度漂移 EMC 开关输出
输出功能
安装形式 连接形式
防护等级 开关频率 尺寸 短路保护 极性倒接保护 上电脉冲抑制 冲击振动应力 工作环境温度 外壳材料 紧固扭矩 认证 绝缘等级 UL认证 1)在I a 最大时 2)无荷载
PNP NPN 常闭(NC) 常开(NO) 非齐平
4针M12连接器 电缆,PVC,2m IP67 4) 2000Hz M12X15)
6)
IME12
IME12-
08NNO 08NNO 08NNS 08NNS 08NPO 08NPO 08NPS 08NPS ZC0S ZW2S ZC0S ZW2S ZC0S ZW2S ZC0S ZW2S
真空镀膜机原理镀膜机的电子枪是怎么样原理
真空镀膜机原理镀膜机的电子枪是怎么样原理2010-12-15镀膜机的电子枪是怎么样原理!电子枪一般有下面几种,工作原理如下:1、二极枪工作原理在电子枪阴极附近发生的物理过程与电子二极管中所发生的物理过程非常类似。
大家知道,在二极管中电流的流通,是由阴极发射的电子的运动来实现的。
若在二极管的阴极与阳极之间加上一定的正向电压ua,阴极逐渐加热(逐渐增大灯丝的加热电压uf),记录相应的阳极电流ia,可得到一条ia/uf关系曲线。
改变ua可得到另一条iauf关系曲线。
当uf比较低时,即阴极温度较低时,阳极电流ia随着加热电压的增大而增长很快。
当uf超过某一数值时,阳极电流ia不随灯丝加热电压uf的增大而增大,若继续提高uf对阳极电流的增大并无好处。
我们知道,在一定的阴极温度下,阴极有一定的发射电流,阴极温度愈高,则发射电流愈大。
当阴极温度足够高时,继续增高阴极温度(此时阴极的发射电流仍在增大)而阳极电流不变,这表明此时阴极发射的电流没有能全部到达阳极。
考察不同的ua所对应的不同曲线,情况都是一样。
因为二极管的阴阳极之间加有正向电压ua,因此阴阳极间会形成一定的电场分布,在阴极未加热时,该电场分布是稳定的。
当阴极加热后,阴极开始发射电子,电子在ua的作用下飞向阳极。
由于有空间电荷的存在,阴阳极之间每一点的电位都要下降,当阴极温度不太高,发射的电子不太多时,阴阳极之间仍为加速场,电子在此电场作用下都能到达阳极。
随着阴极发射电子的增多,阴阳极表面电位梯度的变化是不同的,因为阴极表面的电子除了受阳极加速电场的吸引外,还受到前面空间电荷的排斥作用,因此电子所受到的力较没有空间电荷时小,即电位梯度减小;而在阳极表面的电子除了受阳极加速电场的吸引外,还受到后面空间电荷的推力,所以电位梯度增大。
若继续提高阴极的温度,空间电荷的密度继续增加,由于空间电荷的作用,将使阴极表面的电位梯度下降为零,此时空间电荷在阴极表面产生的电场恰好等于加速场,但方向相反,阴极表面不再受电场力作用。
微机械陀螺仪的基本工作原理、主要特点及应用情况 ppt课件

PPT课件
6/13
1.3 研究现状与研究意义
目前,微机械陀螺仪还属于中、低精度范畴,它们 的研制成功将投入更多的军事和商业应用。尤其在军 事方面,通过采用微机械陀螺仪技术,可以把制导、 导航和控制引入以前未能考虑的一些武器系统中,典 型的如各种制导炮弹和弹丸。
由于硅材料固有的温度敏感性,需要对硅微陀螺仪的 温度特性作特别处理。
PPT课件
13/13
内容提要
1. 概述
2.基本工作原理 3.主要特点
4.应用情况
PPT课件
14/13
4. 应用情况
PPT课件
15/13
Thank you!
PPT课件
工方式等
PPT课件
5/13
1.2 微机械陀螺技术 与国外的差距
1. 国内硅微机电陀螺技术在设计理论研究上和国外 存在差距
2. MEMS工艺条件和国外相比存在较大的差距,产 品加速度敏感性普遍偏大
3. 微弱信号检测及专用集成电路水平和国外相比存 在较大的差距
4. 国内硅微机电陀螺仪的工程化水平和国外相比存 在较大的差距
PPT课件
7/13
内容提要
1. 概述
2.基本工作原理
3.主要特点 4.应用情况
PPT课件
8/13
2. 基本工作原理
基于哥氏效应工作
Ω 敏感轴
PPT课件
9/13
检 测 运 动
动 运 动 驱
2. 基本工作原理
框架式微机械振动陀螺仪结构形式
PPT课件
10/13
2. 基本工作原理
框架式微机械振动陀螺仪的控制系统框图
体微机械加工表面机械加工和liga加工方式等11国内硅微机电陀螺技术在设计理论研究上和国外存在差距mems工艺条件和国外相比存在较大的差距产品加速度敏感性普遍偏大微弱信号检测及专用集成电路水平和国外相比存在较大的差距国内硅微机电陀螺仪的工程化水平和国外相比存在较大的差距国内硅微机电陀螺仪加速度敏感性普遍偏大12目前微机械陀螺仪还属于中低精度范畴它们的研制成功将投入更多的军事和商业应用
[优选文档]分光光度计设备原理讲解PPT
![[优选文档]分光光度计设备原理讲解PPT](https://img.taocdn.com/s3/m/949a3a84af1ffc4fff47ac94.png)
其核心部分是色散元件,起分光作用。主要由两道 全息刻线光栅组成。光栅是利用光的干涉和衍射作用制成 的。可用于紫外、可见和近红外光谱区域。
以的下高为 档我仪司器各,膜是层以实积际分考球量作的为参标数准:检测器。
为可了以更 说明Per确ki地nE表lm明er溶公液司的在吸分光析强仪弱器与行表业达具物有理悠量久的相历应史关和系辉,煌常的用成吸绩光。度(A)表示物质对光的吸收程度,其定义为: 三、在我司的实际应用:
2、单色器:
单色器的作用:从光源的复合光中分出单色光的光学 装置,其主要功能应该是产生光谱纯度高、色散率高。单 色器的性能直接影响入射光的单色性。
单3、色光器线由照入射射物狭体缝时、遵准循直以镜下、规色律散:元件、出射狭缝等几个部分组成。
射能量随波长的变化应尽可能小。 可为用了于 更紫明外确、地可表见明和溶近液红的外吸光谱强区弱域与。表达物理量的相应关系,常用吸光度(A)表示物质对光的吸收程度,其定义为:
光源栅→ 是单利色用器光的→干吸涉收和池衍→射检作测用器制→成信的号。显示系统
②、光源种类分两种:热辐射光源和气体放电光源; 1两94者4年 转成换功设推置出为世n界m处上。第一台商用红外分光光度计-12型。
我物司质采 对用光的是吸收Pe是rki选nE择lm性er的公,司利的用La被mb测da物7质50对S型某紫外波、长可的见光、的近吸红收外来分了光解光物度质计的。特性,这就是光谱法的基础。
标准检测器。
二、分光光度计基本原理
• 1、物质对光的选择性吸收
物质对光的吸收是选择性的,利用被测物质对 某 波长的光的吸收来了解物质的特性,这就是光谱法 的基础。
• 2、朗伯-比尔定律:
12微米热像仪成像原理

12微米热像仪成像原理
热像仪是一种利用物体辐射的热量来成像的设备。
它的成像原理基于物体辐射的热量,根据物体表面温度的不同,发出不同强度的红外辐射。
热像仪通过接收并转换这些红外辐射成为电信号,然后将这些信号转换成图像,从而显示出物体的热分布情况。
热像仪的工作原理主要包括以下几个步骤,首先,热像仪的红外探测器接收到物体发出的红外辐射,并将其转换成电信号;然后,电信号经过处理和放大后,被送入显示器或记录设备,最终形成热像图像。
通过这种方式,热像仪能够清晰地显示出物体的热分布情况,从而在夜视、安防监控、医学诊断等领域发挥重要作用。
4相步进电机工作原理

步进式电动机一、前言步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。
使得在速度、位置等控制领域用步进电机来控制变的非常的简单。
二、感应子式步进电机工作原理(一)反应式步进电机原理由于反应式步进电机工作原理比较简单。
下面先叙述三相反应式步进电机原理。
1、结构:电机转子均匀分布着很多小齿,定子齿有三个励磁绕阻,其几何轴线依次分别与转子齿轴线错开0、1/3て、2/3て,(1/3て,C与齿3向右错开2/32、旋转:如A相通电,B,C相不通电时,由于磁场作用,齿1与A对齐,(转子不受任何力以下均同)。
如B相通电,A,C相不通电时,齿2应与B对齐,此时转子向右移过1/3て,此时齿3与C偏移为1/3て,齿4与A偏移(て-1/3て)=2/3て。
如C相通电,A,B相不通电,齿3应与C对齐,此时转子又向右移过1/3て,此时齿4与A偏移为1/3て对齐。
如A相通电,B,C相不通电,齿4与A对齐,转子又向右移过1/3て这样经过A、B、C、A分别通电状态,齿4(即齿1前一齿)移到A相,电机转子向右转过一个齿距,如果不断地按A,B,C,A……通电,电机就每步(每脉冲)1/3て,向右旋转。
如按A,C,B,A……通电,电机就反转。
由此可见:电机的位置和速度由导电次数(脉冲数)和频率成一一对应关系。
而方向由导电顺序决定。
1/3て改变为1/6て变为1/12て,1/24て,这就是电机细分驱动的基本理论依据。
不难推出:电机定子上有m相励磁绕阻,其轴线分别与转子齿轴线偏移1/m, 2/m……(m-1)/m,1。
并且导电按一定的相序电机就能正反转被控制——这是步进电机旋转的物理条件。
只要符合这一条件我们理论上可以制造任何相的步进电机,出于成本等多方面考虑,市场上一般以二、三、四、五相为多。