基于GPS_GPRS_GIS技术的动态车辆调度_侯文英
行业车辆北斗gps定位智能调度及视频监控管理系统技术方案

行业车辆北斗/GPS定位智能调度及视频监控管理系统技术方案目录第一部分项目概述 (2)一、项目建设的重要性 (2)1.1 智能视频调度管理系统的社会效益 (3)1.2 智能调度管理系统的企业效益 (4)二、系统建设总体目标和原则 (6)2.1 系统建设总体目标 (6)2.2 系统建设原则 (7)第二部分系统设计 (8)一、运输智能调度系统硬件设备 (8)1.1 智能车载终端 (8)二、智能视频调度管理系统软件 (12)2.1 系统功能综述 (12)2.2 车辆监控子系统 (12)第一部分项目概述一、项目建设的重要性当前是我国全面建设小康社会的关键时期,是深化改革开放、加快转变经济发展方式的攻坚时期,也是加快推进现代交通运输业发展的重大战略机遇期。
道路运输是综合运输体系的基础,在现代交通运输业发展中具有举足轻重的作用。
改革开放以来,道路运输生产力持续快速增长,但发展形态粗放的问题没有根本解决。
面向未来,必须加快转变发展方式,迈向发展现代道路运输业的新阶段。
发展现代道路运输业,即通过理念、政策、体制机制和技术的全面创新,一方面着力改造传统产业形态,不断提高运输站场、车辆装备的技术水平和从业队伍的素质,增强运输组织能力,加快结构调整,促进产业升级;另一方面,充分发挥自身比较优势,强化与其他运输方式的有效衔接和良性互动,促进综合运输体系建设和现代物流发展。
长期以来,我国运输车辆的运营缺乏有效的管理监控,运营效率较低。
一方面,企业对运营车辆状况不掌握,另一方面,车辆不能及时了解运营组织意图,形成了"车在路上两不知"的局面。
长途运输管理迫切需要科技创新。
采用智能交通系统(ITS)在全球卫星定位系统(GPS上开发公路运输车辆调度管理系统,正是适应公路运输管理创新要求的产物。
公路运输车辆调度管理系统集GPS技术、移动通讯技术、数字通讯技术、计算机多媒体技术及地理信息技术系统于一体,利用卫星定位手段,结合IC 卡技术、电子地图和数据库管理技术,实现实时监控、双向通讯、动态调度、安全目标跟踪、区域设定、盗窃断油控制和轨迹重放等功能。
地理信息系统知识:GIS在公交车调度中的应用

地理信息系统知识:GIS在公交车调度中的应用地理信息系统(GIS)是一种综合利用地理信息与计算机技术来处理、分析、管理和共享空间数据的一项技术。
在现代化城市公交系统中,GIS已成为一个非常重要的工具。
通过GIS技术,公交部门可以更好的实现公交车辆的调度,优化线路规划和提高公交服务质量,本文将就GIS在公交车调度中的应用进行探讨。
一、 GIS在公交车车辆调度优化方面的应用GIS可以跟踪分析公交车的实时位置和移动情况,这对于车辆调度优化非常重要。
换句话说,GIS可以在车辆到达时提供样本,以确定交通状况并优化服务。
例如,在城市中运作的公交车,可能会面临很多阻碍,比如突然出现的堵车、路段施工或是其他因素。
如果缺乏相应的调度系统,则调度员无法有效地处理这些问题。
但是,如果采用GIS 技术,系统具有实时处理和实时数据的能力,这不仅使调度员能够更好地掌控车辆的行驶路线,还可以更好地处理交通状况和预测交通流量。
二、 GIS在公交线路规划方面的应用通过GIS技术,公交部门可以使用数据分析工具对不同区域的人口分布以及各类交通形式进行分析和总结。
这意味着,通过GIS技术,我们可以更加准确地识别潜在市场,根据市场需求推进线路规划和调整,比较好的解决了城市中的公共交通与城市化之间的问题。
例如,GIS可以调用智能决策模型,提供数学和地理信息分析,以确定公交线路是否需要进行调整或改进。
这样可以有效提高线路质量和服务质量,提高城市公交的满意度和竞争力。
三、GIS在公交车辆运营管理方面的应用通过GIS技术,公交部门可以很容易地追踪公交车的历史数据,这样公交公司就可以更好地规划日常公交行车路线。
例如,GIS可以帮助公交部门管理公交车的停靠站点和线路,以确定哪些线路可以更快到达目的地,哪些道路的容量更大以及哪些路段有更多的车辆流量。
这些数据可以用于分析每个公交线路的性能,从而使整个系统更加精密,减少时间和成本。
四、GIS在公交安全方面的应用通过GIS技术,公交部门可以根据地图获取土地、建筑物、街道等相关信息的一张地图中,并且还可以将这些信息与标记的公共服务区相整合。
基于GPS_GPRS_GIS平台的消防GPS车辆管理系统构建

计算机与现代化2013年第1期JISUANJI YU XIANDAIHUA总第209期文章编号:1006-2475(2013)01-0158-03收稿日期:2012-09-11作者简介:侯忠辉(1974-),男,上海人,上海市消防局信息通信处处长,中校,硕士,研究方向:计算机技术应用。
基于GPS /GPRS /GIS 平台的消防GPS 车辆管理系统构建侯忠辉(上海市消防局,上海200051)摘要:随着灭火救援任务的日趋繁重,消防工作的重要地位显得更为突出。
如何进一步提高消防部队的快速反应能力,实现消防车辆的动态管理、动态调度、动态指挥是其中的关键环节。
本文针对传统的车辆管理,利用成熟的GPS /GPRS /GIS 平台,建立GPS 车辆管理系统,应用于消防实战,以提高消防部队的战斗力。
关键词:消防;GPS ;GPRS ;GIS ;车辆管理中图分类号:TP311文献标识码:Adoi :10.3969/j.issn.1006-2475.2013.01.044Construction of GPS Vehicle Management System Based on GPS /GPRS /GIS PlatformHOU Zhong-hui(Shanghai Fire Department ,Shanghai 200051,China )Abstract :With the increase in fire-fighting and rescue tasks ,the role of fire protection is even more important.How to improvethe rapid response capability of the fire fighting ,the dynamic management ,scheduling and conductor of the fire vehicles is the key ,which determining the combat effectiveness of the fire prevention department.Using the mature GPS /GPRS /GIS platform ,this article proposes a GPS vehicle management system to enhance the combat effectiveness of fire protection.Key words :fire protection ;GPS ;GPRS ;GIS ;vehicle management0引言随着灭火救援任务的日趋繁重,消防工作的重要地位显得更为突出,随之而来消防部队承受的社会压力也与日俱增,其中一项重要指标便是看消防部队的快速反应能力。
用GPS同步地铁时钟系统
城轨交通用GPS 同步地铁时钟系统谭明勇3 方 薇33 隋志国333摘要:利用全球定位系统(G PS )同步地铁时钟系统,介绍了用G PS 进行时间同步的原理,并结合北京地铁的实际应用介绍了G PS 同步仪的设计及应用。
关键词:G PS 地铁时钟系统 同步 中心一级母钟Abstract :Synchronize the clock system through the G lobal P osition System (G PS )in subway is studied ,the principle of time 2synchronization according to the theory of G PS is introduced ,and a G PS synchronizing instrument using in Beijing subway is als o dealt with.K ey w ords :G PS ,Subway clock system ,Synchronizing ,Central primary master clock 3青岛市广播电视科研所 高级工程师,266071 山东青岛 33北京地铁总公司通信信号段 高级工程师,100088 北京 333青岛市广播电视科研所 研究员,266071 山东青岛 地铁时钟系统是地铁通信系统的一个基本组成部分,为各系统提供统一的定时同步信号,使整个地铁执行统一的定时标准,确保通信系统及其他重要控制系统协调一致。
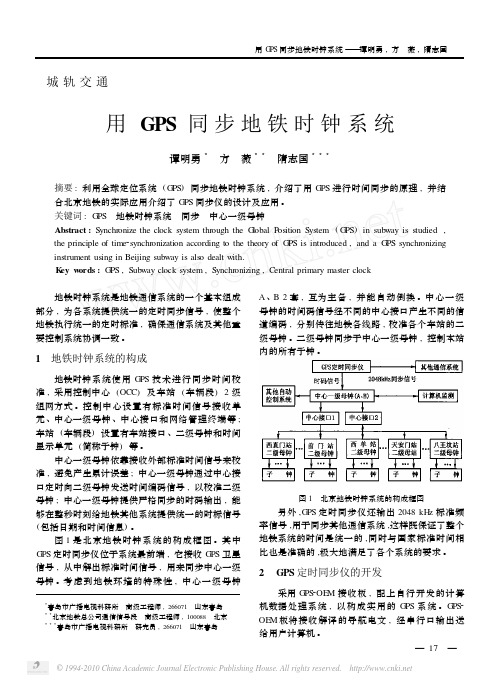
1 地铁时钟系统的构成地铁时钟系统使用G PS 技术进行同步时间校准,采用控制中心(OCC )及车站(车辆段)2级组网方式。
控制中心设置有标准时间信号接收单元、中心一级母钟、中心接口和网络管理终端等;车站(车辆段)设置有车站接口、二级母钟和时间显示单元(简称子钟)等。
中心一级母钟依靠接收外部标准时间信号来校准,避免产生累计误差;中心一级母钟通过中心接口定时向二级母钟发送时间编码信号,以校准二级母钟;中心一级母钟提供严格同步的时码输出,能够在整秒时刻给地铁其他系统提供统一的时标信号(包括日期和时间信息)。
浙江大学城市学院2007年大学生科研计划课题结题检查清单

X2007521016
计算机动画及游戏
徐寅
罗国明
计算20041
黄明何滋铱邱金丰华江张心欣
计算学院
2007年1-12月
一般课题
X2007521017
基于计算机硬件特性的软件加密系统的研发
楼雁
魏金岭
计算20045
黄业会陈灵龙
计算学院
2007年1-12月
一般课题
信息与电气工程学院
课题编号
课题名称
负责人
洪伟东
廖娟
土木20043
徐寅善 姚寅声陈炜 金方圆王晓洁
工程学院
2007年1-12月
一般课题
X2007524043
风水对家装设计影响的研究
童颖磊
张世民
土木20054
汪琪王健陈艳
工程学院
2007年1-12月
一般课题
X2007524044
环保建材推广与使用的现况
刘先廷
廖娟
土木20043
李慧慧董珂铭
工程学院
吴稚辞
杜鹏英
电信20042
姚云波蒋宇杰
信电学院
2007年1-12月
重点课题
XZ2007523023
多通道无线环境监测网络系统
何灵贵
肖铎
自动化20042
张斌马晓东
信电学院
2007年1-12月
重点课题
X2007522024
嵌入式GPS导游系统英文版的制作
陈亮
汤益军
通信20061
杨帆金玲玲
信电学院
2007年1-12月
胡文刚
柳 俊
王硕苹
计算20043
汤纬民 纪栋寅
计算学院
基于ARCGIS公交车辆轨迹查询毕业设计正文
目录第一章绪论11.1研究背景11.2研究目的与意义1第二章地理信息系统(GIS)技术3 2.1GIS概念及组成32.2GIS在车辆监控系统中的作用4第三章系统框架的设计与实现5 3.1系统设计与构想53.2系统开发环境63.3数据库63.3.1 三层架构73.3.2 数据库设计83.3.3 数据库选择83.3.4 数据表设计93.3.5 信息管理与查询功能模块113.4GIS功能模块153.4.1 轨迹查询显示153.4.2 实体对象属性信息查询19第四章结论21附录A22附录B28参考文献32摘要随着越来越多的交通事故的发生,加强交通监管将显得尤为重要。
根据车辆的行车信息进行车辆轨迹查询将在事故后续处理中发挥重要作用。
为此采用ArcGIS Engine以及SQL Server数据库技术,开发出一个基于VS2008平台的公交车辆轨迹查询功能模块。
通过三层架构架构思想进行用户与数据库之间各种数据信息的交融,实现对公司运营状况的妥善管理和不同时间段的公交车辆历史轨迹的查询。
这些功能除了在交通监管中的应用,它还可以在森林防火、运钞车监护、犯罪嫌疑车辆监控也有着很好的实用性。
关键字:ArcGIS Engine;SQL Server;轨迹查询AbstractWith the growing number of traffic accidents, it’s essential to reinforce the traffic supervision .Realizing vehicle track playback on the basis of the driving information will play an important role in the further treatment of an accident. For it to use the ArcGIS Engine and SQL Server database technology to developed a query function model of public transport vehicles track based on VS2008 platform . Through the ideas of three-tier architecture ,which blends a variety of data information betweenthe user and the database to achieve the proper management of the operations of the pany and query the historical trajectory of public transport vehicles at different periods of time . Besides the supervision of transport, it was also useful in the forest fire prevention, bank vehicles guardianship, criminal vehicle monitoring.KeyWords: ArcGIS Engine; SQL Server; trajectory query第一章绪论1.1 研究背景在第十一届全国人民代表大会第四次会议上提出的十二五规划中,表示将继续完善产业发展政策,争取把地理信息产业纳入国家战略性新兴产业规划。
基于GPRS的电动汽车道路行驶工况自学习

基于GPRS的电动汽车道路行驶工况自学习庄继晖;谢辉;严英【摘要】提出了一种基于GPRS的道路行驶工况数据的远程采集方法,并将其应用在电动汽车的实际运行中,获得电动汽车道路试验原始数据库.同时将自组织映射(SOM)神经网络引入到行驶工况的自学习中,通过SOM网络对原始数据进行运动学片段的聚类分析,构建出了电动汽车在实际运行中的3种典型工况,为电动汽车基于行驶工况的自适应优化控制策略提供了基础环节.所构建的行驶工况和其他行驶工况相比具有一般规律,表明应用SOM网络能够很好地实现道路行驶工况的自学习功能.【期刊名称】《天津大学学报》【年(卷),期】2010(043)004【总页数】4页(P283-286)【关键词】电动汽车;行驶工况;自学习;自组织映射网络;GPRS【作者】庄继晖;谢辉;严英【作者单位】天津大学内燃机燃烧学国家重点实验室,天津,300072;天津大学内燃机燃烧学国家重点实验室,天津,300072;天津大学内燃机燃烧学国家重点实验室,天津,300072【正文语种】中文【中图分类】U469.72汽车行驶工况是针对某一类型的车辆(如轿车、轻型车、重型车等)指定用来代表在特定环境(如城区、郊区)的车辆行驶车速-时间历程[1].受到道路特征、地理特征以及交通流量等因素的影响,使得不同地区和典型城市的行驶工况具有不同的特点.通过获取和分析汽车的行驶工况能够为考察车辆在某一地区的排放水平和能量消耗分布提供数据依据;同时对车辆动力系统匹配以及控制策略的优化具有重要的指导作用.电动汽车作为新能源动力车辆,具有高效、节能、零排放等特点,为环保和节能提供了全新的途径.在研制符合环保法规要求的电动汽车的过程中,对道路行驶工况的开发研究是一个重要环节.目前我国轻型车采用的测试循环是欧洲的行驶工况ECE15+EUDC[2],但是我国各城市交通状况以及道路状况等与欧洲国家存在着不同的差异,因此研究符合我国交通特征的车辆实际行驶工况具有重要的意义.一般来说,车辆道路行驶工况的开发包括试验规划、数据采集、数据分析和工况验证4个过程[3-4].在数据采集过程中,通常采用车载数据记录仪或者 GPS导航仪等设备来获得车速等数据.车载数据记录仪能够获得精度和准确度较高的数据,但是受存储空间的限制,不适合车辆数据的长时间连续记录;而 GPS导航仪由于 GPS信号漂移等原因会给车速的测量带来一定的误差.为此,笔者提出了一种基于 GPRS 的远程采集道路行驶工况数据的方法;并利用自组织映射(self-organizing map,SOM)网络对车辆的运动学片段进行聚类,获得与实际运行中交通状况相对应的类集合;最后运用主要特征参数构造出适用的、时间序列较短的行驶工况,从而实现对电动汽车道路行驶工况的自学习.1 基于GPRS的远程数据采集行驶工况自学习流程如图1所示.图1 行驶工况自学习流程Fig.1 Process of self-learning of driving cycle通用分组无线业务GPRS采用分组交换技术,特别适用于间断的、突发性的和频繁的、点多分散、中小流量的数据传输[5],因此 GPRS能够很好地满足电动汽车行驶工况数据远程采集的需要.整个系统结构如图2所示.图2 远程数据采集系统Fig.2 Structure of remote data collection system远程数据采集原理如下:首先车载数据采集终端的CAN模块通过CAN总线与电动汽车主控制器进行数据交换,获得车速和车辆运行状态信息,并将获得的数据按照通信协议进行数据打包成PDU分组数据单元;接着 PDU被传送到 GSM 网络中车载数据采集终端所处的服务GSN(serving GSN,SGSN)[6-7];最后 SGSN 把数据传送到网关 GSN(gateway GSN,GGSN),GGSN 将收到的数据进行解封装处理,转换为可在 Internet中传送的格式,最终采集数据被连接到 Internet上的中央数据库服务器接收,完成整个基于 GPRS远程数据采集的过程.远程采集的数据存储在中央数据库服务器中,必须对原始数据进行处理和解析,才能构建出车辆的实际行驶工况.2 SOM在行驶工况自学习中的应用2.1 SOM神经网络SOM网络是由Kohonen于1981年提出的,其基本结构如图3所示,网络由输入层(神经元数为N)和竞争层(神经元数为M)构成,输入层和输出层之间的神经元形成全连接.SOM 网络可以将任意维的输入模式在输出层上映射为一维、二维或更高维的离散图形,并且保持网络的拓扑结构不变[8].SOM 的聚类功能主要是基于以下2个规则[9-10]实现的.(1)对于提供给网络的任意一个输入向量ξ,确定响应的输出层获胜神经元S,其中(2)确定获胜神经元 S的一个领域范围 Ns,并调整 Ns范围内神经元的权向量W c = W c + ε(ξ −Wc) ,∀c∈ N S,这个调整过程将使 Ns内神经元的权向量朝着输入向量ξ的方向靠近.学习率ε和领域 Ns随着学习时间不断缩小,所有的权向量会在输出向量空间中相互分离开来,各自代表输出空间的一类模式,即SOM的聚类功能.图3 SOM网络的结构Fig.3 Structure of SOM network2.2 基于SOM网络的行驶工况聚类分析研究表明,车辆在不同路段、不同时间的道路状况会有很大的差异,在构建行驶工况中将运动学片段总体样本分成2类比较合理[11].为了反映车辆的运动学水平,本文定义了 15个特征值参数,如表 1所示,通过这些特征值可以了解其对应的交通特性.首先对原始数据进行运动学片段的分割处理;然后应用SOM 网络的聚类分析技术,把电动汽车的运动学片段分成 2类,形成实际行驶中对应的畅通流、拥挤流(包括堵塞流)行驶特征.以训练库中的80个样本作为训练样本,20个样本作为测试样本,使用 Matlab 的神经网络工具箱进行SOM网络的构建.通过SOM网络,样本被分为2类,形成拥挤流(包括堵塞流)、畅通流行驶特征的片段数据库——库1和库2.库1的特征参数显著反映了拥挤流(包括堵塞流)情况下运动学片段的特点.相比库 1而言,库 2的平均速度、平均运行速度以及平均运行距离均明显增大,而平均加、减加速度和怠速时间明显减少,这说明经过 SOM 聚类分析后的运动学片段是有效的,与电动汽车实际行驶情况具有很好的对应关系.表1 运动学特征值表Tab.1 Characteristics of kinematics特征值定义训练库库1 库2平均运行时间/s平均加速时间/s平均减速时间/s平均匀速时间/s平均怠速时间/s平均运行距离/km最大速度/(km·h-1)平均速度/(km·h-1)平均运行速度/(km·h-1)速度标准偏差/(k m·h-1)最大加速度/(m·s-2)最大减速度/(m·s-2)加速度段平均加速度/(m·s-2)减速度段平均加速度/(m·s-2)加速度标准偏差/(m·s-2)223.669 60.860 50.044 62.786 49.977 1.152 87.315 18.547 23.883 10.0182.933-2.933 0.468 162.216 30.392 25.918 42.635 63.270 0.365 42.143 8.098 13.276 7.019 2.400-2.857 0.500 297.016 97.226 78.838 86.838 34.112 2.092 87.538 25.358 28.648 13.598 2.933-2.933 0.431-0.562-0.573-0.5490.3940.3490.4482.3 行驶工况的在线构建经过 SOM 的聚类分析后,得到了 3个片段库,分别为原始数据片段库(综合行驶工况片段库)、拥挤道路行驶工况片段库和畅通行驶工况片段库.在这 3个片段库的基础上构建反映拥挤道路、畅通道路和综合道路行驶特征的 3种行驶工况.行驶工况的构建过程如下:首先,从对应的短行程样本库中随机挑选n个短行程,组成一个约900~1 200 s[12]的工况,并计算其主要特征值;其次,进行工况的有效性判断,如果计算出的特征值与样本中相应特征值的误差不超过10%,则认为此工况满足有效性判定条件,能够成为反映对应道路行驶特征的行驶工况;否则,再次随机挑选 n个短行程组成新的工况,计算其特征值误差,直到满足误差允许范围内的工况出现为止.根据上述过程构建出的 3种行驶工况见图 4~图6.图4为拥挤道路行驶工况,工况时长1,222,s,运行距离2.66,km,平均速度7.8,km/h.图5为畅通道路行驶工况,工况时长 1,083,s,运行距离 8.52,km,平均速度 28.3,km/h.图 6为综合行驶工况,工况时长1,040,s,运行距离6.25,km,平均速度21.6,km/h.图4 拥挤道路行驶工况Fig.4 Driving cycle of congested condition图5 畅通道路行驶工况Fig.5 Driving cycle of straightway condition图6 综合道路行驶工况Fig.6 Driving cycle of general condition为了验证构建出来的工况的有效性,对构建工况和实际工况进行了相对误差分析.获得如下结果,与表1相对应的各参数的平均相对误差分别为 2.97%、5.18%、6.26%、7.37%、6.11%、4.33%、8.01%、7.55%、4.42%、7.23%、8.26%、6.35%、5.77%、7.28%、7.57%.分析结果表明构建出的工况与实际工况的特征参数的相对误差在 10%以内,说明构建出的行驶工况能够比较真实地反映该地区车辆运行的实际状况.本文构建的汽车行驶工况与欧洲工况相比有自己的特点,见表 2.具体表现为综合工况的平均速度比欧洲工况的略高 7.28%;综合工况下的平均加速度相对较低,,比欧洲工况的低19.1%,其平均减速度为-0.58 m/s2,也比欧洲工况的低了19.4%,这反映出欧洲国家的总体道路设施水平要高于天津市的水平.在加减速工况所占比例上,综合工况值分别高于欧洲工况的 7.8%和 19.4%,匀速工况比例基本相当.而在怠速所占比例上,综合工况值略小于欧洲工况值,道路综合通行能力处于中等情况;但是拥挤道路工况与畅通行驶工况在怠速工况比例上相差较大,说明天津不同路段之间的道路工况相差比较大;近年来天津市快速道路网得到不断的完善和发展,使得非繁华地段的道路通行能力较高,相应地,其怠速比例也比较低.综合而言,以天津市为代表的车辆行驶工况和欧洲的 ECE15工况存在较大差异,使用本文方法构建出的工况更能代表我国车辆真实运行状况,能够为电动汽车基于道路行驶工况控制策略的自适应优化提供更为可靠和有效的基础数据.表2 天津与欧洲行驶工况的比较Tab.2 Comparison of driving cycle between in Europe and in Tianjin参数欧洲工况拥挤畅通综合平均速度/(km·h-1) 18.80 7.85 27.36 20.17平均加速度/(m·s-2) 0.63 0.53 0.42 0.51平均减速度/(m·s-2) -0.72 -0.64 -0.51 -0.58加速工况所占比例/% 21.50 19.16 31.54 23.17减速工况所占比例/% 19.50 16.24 24.28 23.29匀速工况所占比例/% 30.20 26.37 30.89 30.78怠速工况所占比例/% 29.80 38.23 13.29 22.763 结语本文提出了一种基于 GPRS的远程数据采集方法,并通过自行开发的车载数据采集终端实现了电动汽车道路行驶数据的远程采集,为电动汽车的行驶工况开发提供了基础数据源.同时将 SOM网络应用于行驶工况的开发,利用 SOM 的聚类分析技术对输入的运动学片段进行分类和行驶工况的自学习,构建出拥挤、畅通和综合行驶 3种行驶工况.所构建的行驶工况与欧洲行驶工况的比较结果表明,SOM 自学习构建的行驶工况满足一般规律,能够反映天津市道路交通的特征.【相关文献】[1] Dembski N,Guezennec Y,Soliman A. Analysis and experimental refinement of real-world driving cycles[C]// SAE Paper. Detroit,2002,2002-01-0069.[2]国家环境保护总局. GB 18352.1—2001 轻型汽车排气污染物排放限值及测量方法[S]. 2001. Ministry of Environmental Protection of the People′s Republic of Chin a. GB 18352.1—2001 Limits and Measurement Methods for Emissions of Pollutants from Light-Duty Vehicles[S]. 2001(in Chinese).[3]杨延相,蔡晓林. 天津市道路汽车行驶工况的研究(B)[J]. 汽车工程,2002,24(2):172-176. Yang Yanxiang,Cai Xiaolin. Study on vehicle driving cycle on road in Tianjin(B)[J]. Automotive Engineering,2002,24(2):172-176(in Chinese).[4] de Haan P,Mario K. Real-World Driving Cycles for Emission Measurements:ARTEM IS and Swiss Cycles(E)[R]. Swiss Agency for Environment,Forests and Landscape(SAEFL),2001.[5] Meyer M. TCP performance over GPRS[C]//IEEE Wireless Communications and Networking Conference. New Orleans,USA,1999,3:1248-1252.[6] Tsao Shiao-Li. Scalable gateway GPRS support node for GPRS/UMTS networks[C]// Proceedings of 56th IEEE Vehicular Technology Conference. Vancouver,Canada,2002,4:2239-2243.[7] Mishra A. Performance and architecture of SGSN and GGSN of general packet radio service(GPRS)[C]//IEEE Global Telecommunications Conference,GLOBECOM '01. US,2001,6:3494-3498.[8] Koikkalainen P. Tree structured self-organizing maps[G]// Oja E,Kaski S. Kohonen Maps. Amsterdam:Elsevier,1999:121-130.[9] Kohonen T. Self-Organizing and Associative Memory[M]. Heidelberg:Springer,1984.[10]张敏灵,陈兆乾,周志华. SOM 算法、LVQ 算法及其变体综述[J]. 计算机科学,2002,29(7):97-100.Zhang Minling,Chen Zhaoqian,Zhou Zhihua. Survey on SOM algorithm,LVQ algorithm and their variants[J]. Computer Science,2002,29(7):97-100(in Chinese).[11] Ronald E K,Thomas A H. Development of the federal urban driving schedule[C]// SAE Paper. 1975,730553.[12]李孟良,李洧,方茂东,等. 道路车辆实际行驶工况解析方法研究[J]. 武汉理工大学学报:交通科学与工程版,2003,27(1):69-72.Li Mengliang,Li Wei,Fang Maodong,et al. The parse method of actual running cycle of vehicle on road[J].Journal of Wuhan University of Technology:Transportation Science and Engineering,2003,27(1):69-72(in Chinese).。
基于ArcGIS Server的车辆调度管理系统的设计与实现

基于ArcGIS Server的车辆调度管理系统的设计与实现王鹏;郑贵省;王元【摘要】针对应急物流车辆调度中车辆使用数量和种类较多,行车道路受干扰较大的特点,为提高车辆使用管理效率,确保运输安全,以及应急物流运输的时效性和准确性,利用ArcGIS Server和Flex搭建了一个基于WebGIS的管理系统;系统实现了驾驶员和车辆信息管理、最佳行驶路径制定、车辆在途监控等功能,为应急物流车辆调度提供一个交互性较高的平台.【期刊名称】《重庆工商大学学报(自然科学版)》【年(卷),期】2014(031)011【总页数】8页(P62-69)【关键词】ArcGIS Server;Flex;WebGIS;车辆调度【作者】王鹏;郑贵省;王元【作者单位】军事交通学院研究生管理大队,天津300161;军事交通学院基础部,天津300161;军事交通学院研究生管理大队,天津300161【正文语种】中文【中图分类】P208目前在应对自然灾害和突发事件时,应急调动的车辆数量较大,品种繁多。
在执行应急物流运输时,特别是紧急情况下,对运输的时效性和准确性有较高的要求,如何最大限度的发挥车辆的利用率,确保行车安全,把“车辆、道路、驾驶员”三者紧密的结合起来,进行优化协调和数据分析,并直观、高效地展示,进而为车辆调度指挥提供依据,具有重要的研究意义。
应急物流公路运输因其特殊性,在运输实施之前必须充分考虑各种因素,对人、车、路信息充分掌握后,进行合理的调度.目前,对车辆的调度与管控都有相应的信息系统,但是这些系统主要是对车辆的出入和使用情况的等信息的记录,并不能结合道路信息,制定相应的调度方案。
在车辆驶离后,对车辆和操作人员实时信息掌控存在不足,特别是在自然灾害发生时,路段被破坏的情况下,如何制定行车路线,尚有不足。
基于这些问题,利用Web服务,借助Flex技术并结合ArcGIS Server平台构建了一个界面直观、交互性强的应急物流车辆调度系统平台。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1引言经典车辆路径问题通常所研究的是单纯的供货问题或者需求问题:即在车辆所完成的一条路径中只有供货任务或只有集货任务。
如果一些货物运输任务的每一项都有自己的供应点和需求点,即要求车辆在一定的供应点装货后运至一定的需求点卸货,这类问题就是集送一体化的车辆路径问题(VRPPD)。
若每一项任务都有时间窗限制,则集送一体化的车辆路径问题进一步扩展为有时间窗的集送一体化的车辆路径问题(VRPPDTW)[1-2]。
本车辆调度系统采用GPS/GIS/GPRS技术,实时地对车辆进行调度,系统由车载GPS接收端,GPRS通讯模块,指挥中心调度终端组成。
2动态车辆的集送一体化调度集送一体化的车辆路径问题(VRPPDTW)是指在车辆指定路线的过程中,用相同的态度对待配送客户和集货客户,而不是把这两者分开考虑,分别派车,它是经典车辆路径问题(VRP)的推广。
动态VRPPDTW是在静态VRPPDTW的研究基础之上发展起来的。
并非所有有关路线制定的信息都在制定过程开始之前就已经知道,这些相关信息包括顾客信息,如地理位置、现场服务时间、需求量等,也包括系统信息,比如两地之间的旅行时间等[3]。
在实际的集送一体化VRP中,大量存在着图1所描述的现象。
两辆货车从同一车场(菱形表示)去执行任务,其中预先需求(车辆出发之前就己经确定的需求)用实线图形表示,矩形表示集货点,圆形表示送货点;实时需求(车辆出发后才收到的需求)用虚线图形表示。
实线箭头表示计划路线,即计划者在车辆从车场出发之前根据预先需求设计好的路线。
当调度中心接到新的需求时,在原来的路线上,要重新制定路线。
虚线箭头表示为了满足实时需求,重新调度优化后的路线。
一般来说,一个路径问题越复杂,限制性条件越多,插入动态需求就会变得越困难。
实现动态调度,需要实时知道车辆的状态及需求的状态,GPS/GPRS/GIS技术为动态调度提供了技术支撑。
基于GPS/GPRS/GIS技术的动态车辆调度侯文英,尹朝晖,曾德强(内蒙古科技大学机械工程学院,内蒙古包头014010)[摘要]利用全球定位系统(GPS)、通用分组无线服务技术(GPRS)和地理信息系统技术(GIS)构建了新型的动态车辆调度系统。
该系统实时跟踪车辆位置,检测新的客户需求,动态地优化车辆调度方案,能够更好地满足用户的需求。
[关键词]智能交通;动态车辆调度系统;GPS/GPRS/GIS;车辆调度;集送一体化[中图分类号]F253.9[文献标识码]A[文章编号]1005-152X(2013)04-0159-03Dynamic Vehicle Dispatching Based on GPS/GPRS/GISHouWenying,YinZhaohui,ZengDeqiang(SchoolofMechanicalEngineering,InnerMongoliaUniversityofScience&Technology,Baotou014010,China)Abstract:Inthispaper,usingtheGPS,GPRSandGIStechnologies,weestablishedanewdynamicvehicledispatchingsystemwhichcouldtracethepositionofthevehiclesinarealtimemanner,detectnewcustomerdemandanddynamicallyoptimizevehicledispatchingplans.Keywords:intelligenttraffic;dynamicvehicledispatchingsystem;GPS/GPRS/GIS;vehicledispatching;integratedcollectionanddelivery[收稿日期]2012-09-18[作者简介]侯文英(1959-),男,内蒙古包头人,教授,硕士生导师,研究方向:物流工程。
doi:10.3969/j.issn.1005-152X.2013.04.053侯文英,等:基于GPS/GPRS/GIS技术的动态车辆调度技术与方法159--物流技术2013年第32卷第4期(总第283期)调度中心计划集货点增加集货点计划送货点增加送货点图1动态车辆调度的示意图3调度系统支撑技术3.1GPS定位技术GPS由三部分组成:空间卫星,地面控制部分,车载部分(GPS接收机)。
GPS定位的基本原理是测量出已知位置的卫星到用户接收机之间的距离,然后综合多颗卫星的数据就可知道接收机的具体位置。
要达到这一目的,卫星的位置可以根据星载时钟所记录的时间在卫星星历中查出。
而用户到卫星的距离则通过纪录卫星信号传播到用户所经历的时间,再将其乘以光速得到。
GPS的实时差分动态定位是安设在一个运动载体上的GPS信号接收机及安设在一个基准站上的另一台GPS接收机,联合测得该运动载体的实时位置,从而描绘出该运动载体的运动轨迹,故差分动态定位又称为相对动态定位[4-5]。
3.2GPRS分组技术GPRS是一种采用分组交换技术传输数据及信令的高效率数据传输方式,是区别于原有GSM电路交换方式的另一种数据传输方式。
GPRS允许用户在分组交换模式下发送和接收数据,从而提供了一种高效、低成本的无线分组数据业务。
分组交换的基本过程是把数据先分成若干个小的数据包,可通过不同的路由,以存储转发的接力方式传送到目的端,而组装成完整的数据。
分组交换基本上不是实时系统,延时也不固定,但可以使不同的数据传输“共用”传输带宽:有数据时占用带宽,无数据时不占用,从而分享资源。
采用分组交换的GPRS则可灵活运用无线信道,每一个用户可以有多个无线信道,而同一信道又可以由几个用户共享,从而极大的提高了无线资源的利用率。
GPRS的特点是高速数据传输和永远在线,数据实现分组发送和接收,可以稳定地传送大容量的高质量音频与视频文件,由于建立新的连接几乎无需任何时间(即无需为每次数据的访问建立呼叫连接),因而随时都可与网络保持联系[6-7]。
3.3GIS组件开发地理信息系统(GIS)是计算机科学、地理学、测量学和地图学等多门学科的交叉,它以地理空间数据库为基础,采用地理模型分析方法适时提供动态的地理信息。
它表达的是空间位置及所有与位置相关的信息。
GIS又是地球空间实体的再现和综合,其信息的基本表达形式是各种二维或三维电子地图[8]。
完整的GIS主要由四个部分构成,其核心部分是计算机软、硬件系统。
空间数据库反映了GIS的地理内容,而管理人员和用户则决定系统的工作方式和信息表达方式。
MapGIS是集当代最先进的图形、图像、地质、地理、遥感、测绘、人工智能、计算机科学于一体的大型智能软件系统,是集数字制图、数据库管理及空间分析为一体的空间信息系统,是进行现代化管理与决策的先进工具。
4动态车辆调度系统的建立4.1调度系统主要功能模块基于计算机技术的发展,利用GPS/GPRS/GIS技术,开发出应用于动态车辆调度的优化系统。
系统以GIS为基础平台,集成了车辆优化调度算法和数据库管理,是集图形、图像处理及数据可视化技术于一体的系统。
系统以区域电子地图为基础地理信息来源,同时连接各种动态数据库。
如图2,主要功能模块包括:(1)客户信息处理模块。
客户的信息处理包括接受客户货物申请及订单收集;根据订单需求进行货运量的统计分析,以便进行统一调度;建立客户的信息档案库,并对客户的变动信息及时更新;对车辆货物进行调度后,把调度结果通过网络平台或者无线通讯发送给客户,方便客户及时了解货物动态。
(2)车辆GPS定位及货物状态信息处理功能。
车载智能终端通过GPS接收机获得车辆的定位信息,结合车辆装载货物的信息间隔分析、整理打包、调制发送到调度中心进行处理、存储,并在GIS系统的电子地图叠加显示,绘制目标车辆的实时运行轨迹。
(3)调度管理模块。
包括调度路线优化和GIS管理模块。
调度路线优化模块根据车辆的状态及客户的状态信息实时合理安排调度车辆和路线,根据动态的运行图系统自动生成调度路线图表,同时还可以结合实际需要进行人工的最后调整。
GIS管理模块在车辆运行过程中要求准确地把车辆定位在电子道路上,采用MapGIS软件工具将定位数据准确地与电子地图匹配,在调度中心屏幕对运行图显示、放大、缩小、平移,增开电子地图显示窗口、对窗口内图像进行处理。
(4)数据通信功能模块。
系统软件能使调度中心与受控目标车辆之间、车辆相互之间实现双向通信,同时受控目标车辆的GPS定位、状态、图像等信息上传至调度中心,调度中心可将指令、遥控信号和其他服务通过GPRS发送给任意受控车辆。
(5)信息日常维护模块。
主要用来对城市地图信息的更新,对系统运行的日常维护。
如系统用户权限管理、系统运行日志管理、岗位人员信息维护和费用的管理等。
4.2调度系统工作模型调度控制中心是整个系统的核心,负责接收各车载移动终端发出的信息。
同时,通过网上平台实时接收新任务的位置和数量,将调度控制中心的车辆调度方案发送给相应的车载技术与方法160--(上接第115页)[参考文献][1]张西林.配送中心劳动定员方法研究[D].长春:吉林大学,2009.[2]郭伏,李森.作业测定技术应用中的问题研究[J].工业工程,2003,6(3):57-60.[3]PilFK,HolwegM.Linkingproductvarietytoorder-fulfill-mentstrategies[J].Interfaces,2004,34(5):394-403.[4]易树平,郭伏.基础工业工程[M].北京:机械工业出版社,2006.[5]孙林岩.人因工程学[M].北京:中国科学技术出版社,2005.[6]祝巧巧.计算机辅助工时定额系统的研究与开发[D].南京:东南大学,2009.[7]王英利.基于秒表法制定标准工时的研究[J].内蒙古科技与经济,2009,(9):130-131.[8]张立厚.企业工时定额管理与工时定额员[J].机械管理开发,2001,(S1):62-63.[9]赵晶英,卢润德.基于工作抽样的生产线平衡的实证研究[J].统计与决策,2007,(5):64-65.[10]李阳.IE工作抽样方法研究行政人员工作效率问题[J].煤炭技术,2011,30(3):253-254.[11]张西林.X配送中心拣选作业时间的计算[J].物流技术,2010,(17):56-58.[12]傅晓锦.金属切削加工中逐步回归模型[J].江苏机械制造与自动化,2000,(2):18-20.[13]傅武雄.标准工时制定与工作改善[M].厦门:厦门大学出版社,2003.移动终端,并将收到的各车载移动终端发来的信息送往地理信息系统(GIS),实现数据存储和数据库更新。