自动控制理论阶段性作业11
北交《自动控制理论》在线作业一-0004
北交《自动控制理论》在线作业一-0004把系统的开环频率特性画在()上可以求得闭环频率特性。
A:等M圆图
B:系统图
C:伯德图
D:结构图
答案:A
在采样过程中,()用于解决各采样点之间的数据恢复问题。
A:采样器
B:保持器
C:传输器
D:接收器
答案:B
超前校正是由于正相移的作用,使截止频率附近的()明显上升,从而具有较大的稳定裕度。
A:相位
B:角度
C:幅值
D:增益
答案:A
单位脉冲函数的拉氏变换等于()。
A:1
B:2
C:3
D:4
答案:A
二阶系统当共轭复数极点位于()线上时,对应的阻尼比为0.707。
A:±45°
B:±30°
C:±60°
D:±90°
答案:A
常用的典型外作用有()。
自动控制理论I作业

《自动控制理论I》第二章作业控制系统的数学描述学号:_______________姓名:_______________2008-10-102.0 在下图所示的电路中,输入量是电压v (t ) (a )以电压u 2(t )为输出量,列写微分方程; (b )以电压u 3(t )为输出量,列写微分方程;(c )设12120.1M ,10, 2.5R R C F C F μμ==Ω==,将(a )的结果写成数字形式。
(t)v2.1 简单伺服系统的如图所示,其数据如下:电位器比例系数为0.1V/rad ,放大器的电压放大倍数为100,电机电枢电路的电感为0.5H ,电阻为10Ω,电机转子连同转动部分的机电时间常数为0.4s ,电机的比例系数为0.2V s/rad ,减速器的减速比为20:1,负载力矩为M L ,要求: (1)列写关于()t ϕ的微分方程;(2)列写关于电机力矩M (t )的微分方程;(3)说明这个数学模型中忽略了哪些次要因素;(4)如果M L = 0,且假设在t = 0时刻有0,0ϕψ==,这个系统是否能够运动,为什么?DKM L2.2 如图所示的电路中,滑动变阻器的总电阻r 沿变阻器的长度l 均匀分布。
设变阻器滑臂距离变阻器中点的位移x 是随时间变化的。
要求:(1)以x 为自变量,写出关于电流i 的方程; (2)设r << R ,写出关于i (t )的近似线性方程。
2.3 结构图化简:U2.4结构图化简2.5 对右图所示系统:(a)写出P到Y的传递函数;(b)写出E到Y的传递函数;2.6 对上图所示系统:(a)写出V到Y的开环传递函数;(b)写出V到Y的闭环传递函数;。
最新奥鹏北京理工大学北理工《自动控制理论1 》在线作业-参考答案

12. 开环频域性能指标中相角裕度对应时域性能指标 ( ) 。 【选项】: A 超调 B 稳态误差 C 调整时间 D 峰值时间
【答案】:Aபைடு நூலகம்
13. 最小相角系统闭环稳定的充要条件是 ( ) 【选项】: A 奈奎斯特曲线不包围(-1,j0)点 B 奈奎斯特曲线包围(-1,j0)点 C 奈奎斯特曲线顺时针包围(-1,j0)点 D 奈奎斯特曲线逆包围(-1,j0)点
【答案】:A
3. 单位反馈系统的开环传递函数 G(s)=16/(s(s+4*sqrt(2))),其幅值裕度 h 等于 ( ) 【选项】: A0 B 4sqrt(2)dB C 16dB D 无穷
【答案】:D
4. 系统对输入信号的时域响应中,其调整时间的长短是与( )指标密切相关。 【选项】: A 允许的峰值时间 B 允许的超调量 C 允许的上升时间 D 允许的稳态误差
【答案】:A
14. 系统稳定的充分必要条件是其特征方程式的所有根均在根平面的( )。 【选项】: A 右半部分 B 左半部分 C 实轴上 D 虚轴上
【答案】:B
15. 放大环节的对数幅频特性曲线是( )。 【选项】: A 平行于横轴的直线 B 斜率为 1 的直线 C 逐渐增大至某一值的曲线 D 垂直于横轴的直线
【答案】:A 执行元件的功能是直接带动控制对象 |C 测量元件一般指传感器 |D 计算机属 于补偿元件 |
22. 比例控制的优点是( )。 【选项】: A 及时 B 快速 C 控制作用强 D 无稳态偏差
【答案】:A 及时 |B 快速 |C 控制作用强 |
23. 频率特性常用表示方法有( )。 【选项】:
D A、B、C 都不是
【答案】:C
10. 二阶系统的调整时间长,则说明( )。 【选项】: A 系统响应快 B 系统响应慢 C 系统的稳定性差 D 系统的精度差
北理工《自动控制理论1 》在线作业1答案

北理工《自动控制理论1 》在线作业-0002试卷总分:100 得分:0一、单选题(共20 道试题,共60 分)1.主导极点的特点是()。
A.距离虚轴很近B.距离实轴很近C.距离虚轴很远D.距离实轴很远正确答案:A2.系统的频率特性()A.是频率的函数B.与输入幅值有关C.与输出有关D.与时间t有关正确答案:A3.单位反馈系统的开环传递函数G(s)=16/(s(s+4*sqrt(2))),其幅值裕度h等于()A.0B.4sqrt(2)dBC.16dBD.无穷正确答案:D4.系统对输入信号的时域响应中,其调整时间的长短是与()指标密切相关。
A.允许的峰值时间B.允许的超调量C.允许的上升时间D.允许的稳态误差正确答案:D5.系统型次越高,稳态误差越()。
A.越小B.越大C.不变D.无法确定正确答案:A6.用实验法求取系统的幅频特性时,一般是通过改变输入信号的()来求得输出信号的幅值。
A.相位B.频率C.稳定裕量D.时间常数正确答案:B7.系统的传递函数在右半S平面上没有零点和极点,则该系统称作()。
A.非最小相位系统B.最小相位系统C.不稳定系统D.振荡系统正确答案:B8.适合应用传递函数的系统是()。
A.单输入,单输出的线性定常系统B.单输入,单输出的线性时变系统C.单输入,单输出的定常系统D.非线性系统正确答案:A9.已知串联校正装置的传递函数为0.2(s+5)/(s+10),则它是()A.相位迟后校正B.迟后超前校正C.相位超前校正D.A、B、C都不是正确答案:C10.二阶系统的调整时间长,则说明()。
A.系统响应快B.系统响应慢C.系统的稳定性差D.系统的精度差正确答案:B11.典型二阶系统的超调量越大,反映出系统()A.频率特性的谐振峰值越小B.阻尼比越大C.闭环增益越大D.相角裕度越小正确答案:D12.开环频域性能指标中相角裕度对应时域性能指标( ) 。
A.超调B.稳态误差C.调整时间D.峰值时间正确答案:A13.最小相角系统闭环稳定的充要条件是()A.奈奎斯特曲线不包围(-1,j0)点B.奈奎斯特曲线包围(-1,j0)点C.奈奎斯特曲线顺时针包围(-1,j0)点D.奈奎斯特曲线逆包围(-1,j0)点正确答案:A14.系统稳定的充分必要条件是其特征方程式的所有根均在根平面的()。
《自动控制理论》作业集参考答案(专本科函授)第一部分.
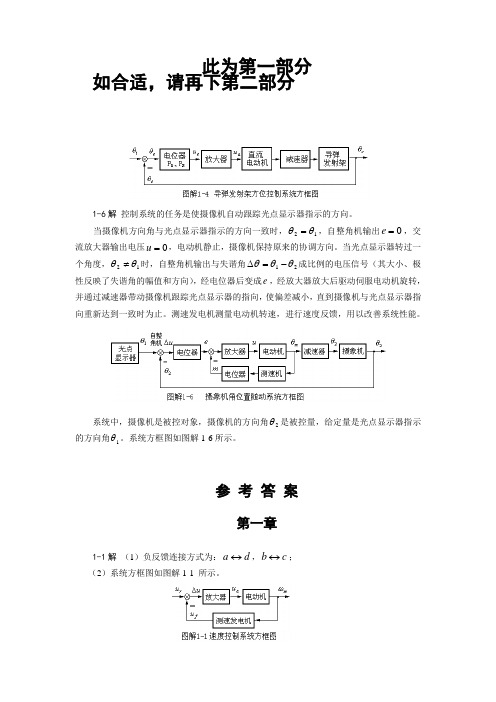
此为第一部分如合适,请再下第二部分1-6解 控制系统的任务是使摄像机自动跟踪光点显示器指示的方向。
当摄像机方向角与光点显示器指示的方向一致时,12θθ=,自整角机输出0=e ,交流放大器输出电压0=u ,电动机静止,摄像机保持原来的协调方向。
当光点显示器转过一个角度,12θθ≠时,自整角机输出与失谐角21θθθ-=∆成比例的电压信号(其大小、极性反映了失谐角的幅值和方向),经电位器后变成e ,经放大器放大后驱动伺服电动机旋转,并通过减速器带动摄像机跟踪光点显示器的指向,使偏差减小,直到摄像机与光点显示器指向重新达到一致时为止。
测速发电机测量电动机转速,进行速度反馈,用以改善系统性能。
系统中,摄像机是被控对象,摄像机的方向角2θ是被控量,给定量是光点显示器指示的方向角1θ。
系统方框图如图解1-6所示。
参 考 答 案第一章1-1解 (1)负反馈连接方式为:d a ↔,c b ↔; (2)系统方框图如图解1-1 所示。
1-3解 加热炉采用电加热方式运行,加热器所产生的热量与调压器电压c u 的平方成正比,c u 增高,炉温就上升,c u 的高低由调压器滑动触点的位置所控制,该触点由可逆转的直流电动机驱动。
炉子的实际温度用热电偶测量,输出电压f u 。
f u 作为系统的反馈电压与给定电压r u 进行比较,得出偏差电压e u ,经电压放大器、功率放大器放大成a u 后,作为控制电动机的电枢电压。
在正常情况下,炉温等于某个期望值T °C ,热电偶的输出电压f u 正好等于给定电压r u 。
此时,0=-=f r e u u u ,故01==a u u ,可逆电动机不转动,调压器的滑动触点停留在某个合适的位置上,使c u 保持一定的数值。
这时,炉子散失的热量正好等于从加热器吸取的热量,形成稳定的热平衡状态,温度保持恒定。
当炉膛温度T °C 由于某种原因突然下降(例如炉门打开造成的热量流失),则出现以下的控制过程:控制的结果是使炉膛温度回升,直至T °C 的实际值等于期望值为止。
西安石油大学函授《自动控制理论》作业1-5全
自动控制理论作业一1 / 20 单选题(5分)正确答案 BA开环控制B随动控制C复合控制D闭环控制2 / 20 单选题(5分)正确答案 AA稳定性B动态特性C稳态特性D瞬态特性3 / 20 单选题(5分)正确答案 DA系统的扰动量影响不大B系统的扰动量大且无法预计C闭环系统不稳定D系统的扰动量可以预计并能进行补偿4 / 20 单选题(5分)正确答案 BA与输入信号有关B只取决于系统结构和元件的参数C闭环系统不稳定D系统的扰动量可以预计并能进行补偿5 / 20 单选题(5分)正确答案 CA经典理论B控制理论C经典控制理论D现代控制理论6 / 20 单选题(5分)正确答案 CAζ=1Bζ=0C0<ζ<1D0≤ζ≤17 / 20 单选题(5分)正确答案 B振荡。
Aζ=1Bζ=0C0<ζ<1D0≤ζ≤18 / 20 单选题(5分)正确答案 D极点位于位于( )。
A虚轴正半轴B实正半轴C虚轴负半轴D实轴负半轴9 / 20 单选题(5分)正确答案 B有根都具有( )。
A实部为正B实部为负C虚部为正D虚部为负10 / 20 单选题(5分)正确答案 BA越大系统的动态特性越好B越大系统的稳态特性越好C越大系统的阻尼越小D越小系统的稳态特性越好11 / 20 单选题(5分)正确答案 D根轨迹是指开环系统某个参数由0变化到∞,( )在s平面上移动的轨迹。
A开环零点B开环极点C闭环零点D闭环极点12 / 20 单选题(5分)正确答案 A,则共轭出现。
所以根轨迹( )。
A对称于实轴B对称于虚轴C位于左半[s]平面D位于右半[s]平面13 / 20 单选题(5分)正确答案 C系统的开环传递函数,则全根轨迹的分支数是( )。
A1B2C3D414 / 20 单选题(5分)正确答案 A已知控制系统的闭环传递函数是,则其根轨迹起始于( )。
AG(s)H(s)的极点BG(s)H(s)的零点C1+G(s)H(s)的极点D1+G(s)H(s)的零点15 / 20 单选题(5分)正确答案 B系统的闭环传递函数是,根轨迹终止于( )。
自动控制理论第1-7次作业

第一次作业2—1 设机械系统如图2—1 所示,其中x i 为输入位移,x0 为输出位移。
试分别列写各系统的微分方程式及传递函数。
图2—1 机械系统解①图2—57(a):由牛顿第二运动定律,在不计重力时,可得21 ? f 1 ( x &i ? x &0 ) ? f2 x &0 ? m &x&0 整理得m d x 0 ? ( f ? f ) dx 0 ? f dx i dt 2 1 2 dt 1 dt将上式进行拉氏变换,并注意到运动由静止开始,即初始条件全部为零,可得?ms 2? ( f ? f 2 )s ?X 0 (s ) ? f 1 sX i(s )于是传递函数为X 0 (s ) ? X i (s ) f 1 ms ? f 1 ? f 2②图 2—57(b):其上半部弹簧与阻尼器之间,取辅助点 A ,并设 A 点位移为 x ,方向朝下;而在其下半部工。
引出点处取为辅助点 B 。
则由弹簧力与阻尼力平衡的原则,从 A 和 B 两点可以分别列出如下原始方程:K 1 ( x i ? x ) ?f ( x& ? x &0 )K 2 x 0 ? f ( x& ? x &0 )消去中间变量 x ,可得系统微分方程f (K ? K ) dx 0 ? K K x ? K f dx i 1 2 dt 1 2 0 1 dt对上式取拉氏变换,并计及初始条件为零,得系统传递函数为X 0 (s ) ? X i (s ) fK 1 s f (K 1 ? K 2 )s ? K 1 K 2③图 2—57(c):以 x 0 的引出点作为辅助点,根据力的平衡原则,可列出如下原始方程:K 1 ( x i ? x ) ? f ( x&i ? x &0 ) ? K 2 x 0 移项整理得系统微分方程f dx 0 ? (K dt 1 ? K 2 ) x 0 ? f dx i dt ? K 1 x i 对上式进行拉氏变换,并注意到运动由静止开始,即x i (0) ? x 0 (0) ? 0则系统传递函数为X 0 (s ) ? X i (s ) fs ? K 1 fs ? (K 1 ? K 2 )2—2 试分别列写图中个无源网络的微分方程式。
自动控制理论(专升本)阶段性作业1

(B) 不同
(C) 不存在
(D) 不定
参考答案:A
5. 适合应用传递函数描述的系统是_____。(3分)
(A) 单输入单输出的线性定常系统
(B) 单输入单输出的线性时变系统
(C) 单输入单输出的定常系统
(D) 非线性系统
参考答案:A
6. 传递函数反映了系统的动态性能,它和下列因素 _____有关。(3分)
正确 错误 参考答案:正确
解题思路:
2. 传递函数分别为G1(s)和 G2(s)两个环节串联后等效传递函数为
正确 错误 参考答案:正确
解题思路:
。(4分)
3. 稳态误差为
。(4分)
正确 错误 参考答案:正确
解题思路:
4. 时域里判断闭环系统稳定性的判据是劳斯判据。(4分)
正确 错误 参考答案:正确
解题思路:
(A) 比较元件
(B) 给定元件
(C) 反馈元件
(D) 放大元件
参考答案:C
3. 传递函数的概念适合于_____系统。(3分)
(A) 线性.非线性
(B) 线性时变
参考答案:D
(C) 非线性定常
(D) 线性定常
4. 同一系统,不同输入信号和输出信号之间传递函数的特征方程 _____。(3分)
(A) 相同
(A) 输入信号
(B) 初始条件
(C) 系统的结构和参数
(D) 输入信号和初始条件
参考答案:C
7. 传递函数反映了系统的动态性能,它和下列因素 _____有关?(3分)
(A) 输入信号
(B) 初始条件
(C) 系统的结构和参数
(D) 输入信号和初始条件
参考答案:C
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
中国地质大学(武汉)远程与继续教育学院
自动控制理论课程作业1(共 4 次作业)
学习层次:专升本涉及章节:第1章~第2章
1画出下列R-C网络的方块图。
2 将上题的系统方块图简化。
3 系统结构图如下:
已知G(s)和H(s)两方框对应的微分方程分别是: 且初始条件均为零。
试求传递函数C(s)/R(s)及E(s)/R(s)。
4 试求下图无源网络的传递函数。
5 系统结构图如下所示:
试用梅逊公式求闭环系统的传递函数。
6 画出下图系统的流程图
7利用Mason增益公式,求下图所示系统的闭环传递函数C(s)/R(s)。
8系统的方块图如下图所示,试画出信号流图,并用梅逊公式求系统的传递函数。
参考答案
1
解:(1)根据电路定理列出方程,写出对应的拉氏变换,也可直接画出该电路的运算电路图如图(b);
(2)根据列出的4个式子作出对应的框图;
(3)根据信号的流向将各方框依次连接起来。
2 解:
分支点A后移(放大->缩小),比较点B前移(放大->缩小)。
比较点1和2交换。
方块图的简化过程
3 解:
将微分方程两边同时作拉氏变换,并考虑到零初始条件,得:
6sC(s)+10C(s)=20E(s)
20sB(s)+5B(s)=10C(s)
于是,得到:
由图可知:
故:
将(1),(2)代入并整理,得:
再由E(s)=M(s)-B(s)=10R(s)-H(s)C(s)解得:
4 解:
设复阻抗:
故:无源网络的传递函数为:
5 解:
先将结构图转化为信号流图:
可见:有两个前向通道:
流图特征式:
且:流图余因子式
根据梅逊公式,有:
6 解:
7 解:由信号流图可见:
有三个前向通道,且:
有四个单独回路,且:
其中,是两两互不接触回路
故:流图特征式:
且:流图余因子式
根据梅逊公式,有:
8 解:。