400Hz中频单相电压源逆变器的输出控制及其并联运行控制
400Hz逆变器电压环反馈控制设计

400Hz逆变器电压环反馈控制设计
摘要:主要介绍了Bode 定理,以此为理论基础,介绍了逆变器建模,电压环反馈控制设计等。
关键词:Bode 定理;Bode 图;回路增益
1 控制理论基础
1.1 回路增益
对于一般负反馈控制系统,其闭环系统方框图如图1 所示。
闭环传递函数,其特征方程式为F(s)=1+G(s)H(s)=0,特征方程式的根即为系统的闭环极点。
由此方程式可以看出G(s)H(s)项,其包含了所有关于闭环极点的信息,一般称G(s)H(s)为回路增益。
实际应用中,可通过对回路增益Bode 图的分析来设计系统的补偿网络,以达到闭环系统稳定性要求。
图1 闭环系统框图
1.2 Bode 定理
Bode 定理对于判定所谓最小相位系统的稳定性以及求取稳定裕量是十分有用的。
其内容如下:
1)线性最小相位系统的幅相特性是一一对应的,具体地说,当给定整个频率区间上的对数幅频特性(精确特性)的斜率时,同一区间上的对数相频特性也就被唯一地确定了;同样地,当给定整个频率区间上的相频特性时,同一区间上的对数幅频特性也被唯一地确定了;
2)在某一频率(例如剪切频率ωc)上的相位移,主要决定于同一频率上的对数幅频特性的斜率;离该斜率越远,斜率对相位移的影响越小;某一。
中频电源电路设计
摘要随着科学技术的发展以及提高我国国防能力的需要,对军事设施的技术改造已被列为军事技术改造中的重点。
中频电源指输出频率为400Hz的电源,它可以为动力系统及导航与武备系统供电。
传统的400Hz中频电源体积大,输出波形不稳定。
本文所设计的400Hz中频电源通过整流电路、逆变电路、积分电路、放大电路和检波电路及控制其最后的输出电压,实现了电压的稳定输出,具有体积小、功率大和波形无失真等优点,有着广泛的用途和良好的发展前景。
关键词:中频电源,PWM调制,输出变压器电力电子装置及系统课程设计任务书一、课程设计的目的通过电力电子装置及系统的课程设计达到以下几个目的:1、培养学生文献检索的能力,特别是如何利用Internet检索需要的文献资料。
2、培养学生综合分析问题、发现问题和解决问题的能力。
3、培养学生运用知识的能力和工程设计的能力。
4、培养学生运用仿真工具的能力和方法。
5、提高学生课程设计报告撰写水平。
二、课程设计的要求1. 题目题目:中频电源电路设计主要技术数据●输入电压:三相360V~400V,50Hz±5%●输出电压:单相,220V±2%,400Hz±0.5%●输出功率:4kW●输出电流:22A●功率因数:0.8二、课程设计的要求1. 题目题目:中频电源电路设计主要技术数据●输入电压:三相360V~400V,50Hz±5%●输出电压:单相,220V±2%,400Hz±0.5%●输出功率:4kW●输出电流:22A●功率因数:0.8●效率:85%设计内容:●主电路设计和参数选择●控制系统及辅助电源电路设计●电路仿真分析和仿真结果要求学生在教师的指导下,独力完成所设计的系统主电路、控制电路等详细的设计(包括计算和器件选型)。
严禁抄袭,严禁两篇设计报告基本相同,甚至完全一样。
设计报告最后给出设计中所查阅的参考文献最少不能少于5篇,且文中有引用说明,否则也不能得优)。
400HZ逆变器报告

400HZ船用逆变电源随着电力电子技术和现代交流调速技术的迅速发展,舰船采用电力推进方式逐渐成为重要的发展趋势。
这主要是因为电力推进同传统的机械式推进相比具有多个方面的优点,例如噪音低,机动性能好;舱室布置灵活;经济性好;可靠性高等。
鉴于船用系统的特殊性,要求这种推进变频器具有高功率密度、高可靠性和高性能指标,同时还要兼顾经济性和可实现性等因素,因此在结构、制造、器件选择及控制策略上都有特殊的要求。
其中逆变器在变频系统中起到重要作用,如图所示:AC360~400VAC230V课题的性能指标:逆变器按照输出交流的频率可分为:工频(50~60HZ)逆变、中频(400HZ 到几十kHZ)逆变和高频(几十kHZ到几MHZ)逆变。
本课题为中频400HZ 逆变器。
主要性能指标如下:(1)输入电压为三相360V~400V,(50±5%)HZ(2)输出电压为单相(230±2%)HZ(3)输出功率为10kW(4)输出电流为22A(5)功率因数cosΦ=0.8(6)效率大于85%设计电路1.主电路选型船用变流器的主要类型从国外的发展情况来看,电力推进舰船采用的变流器结构主要有以下几种: l)交一直变流器,控制对象为直流电动机,其结构见图2。
2)交一交循环变频器,控制对象为感应或者同步电动机,其结构见图3。
3)同步变频器,控制对象为同步电动机,其结构见图4。
4)电压源型脉宽调制变频器,控制对象为感应电机、同步电动机或者永磁电机,其结构见图5。
由主要性能指标可知,该逆变电源的电压、电流等级为中等,则主电路采用AC—DC—AC方案,即电压源型脉宽调制变频器。
2.逆变器选型逆变器按照输出相数分,有单相、三相两种,三相逆变器可由三相半桥结构组成,也可以由三个相位互差120°的单相逆变器组成。
单相逆变器主要有半桥式、全桥式和推挽式三种。
拓扑结构图如下:1)半桥电路:2)全桥电路:变压器3)推挽电路:中、大容量逆变器多采用全桥结构,故此课题中选用全桥式逆变电路。
交流400Hz的机载高频开关电源解决方案
交流400Hz 的机载高频开关电源解决方案机载高频开关电源产品专门用于输入交流400Hz 的场合,这项产品主要应用于军用雷 达、航空航天、舰船、机车以及导弹发射等。
研制出机载高频开关电源产品对电子武器装备 系统的国产化,打破国际封锁,提高我军装备的机动性,高性能都有重要的意义。
机载电源的使用环境比较恶劣,必须适应宽范围温度正常工作,并能经受冲击、震动、 潮湿等应力筛选试验,因此设计机载电源的可靠性给我们提出了更高的要求。
机上可供选择的供电电源有两种输入方式:115V/400Hz 中频交流电源和28V 直流电源。
两种输入方式各有优缺点,115V/400Hz 电源波动小,需要器件的耐压相对较高;而28V 直流 电源却相反,一般不能直接提供给设备部件使用,必须将供电电源进行隔离并稳压成为需要 的直流电源才能使用。
下面主要介绍115V/400Hz 中频交流输入方式所研制的开关电源,它 的输出电压270〜380Vde 可以调节,输出功率不小于3000W,环境温度可宽至-40℃〜+55℃, 完全适应军品级电源的需要。
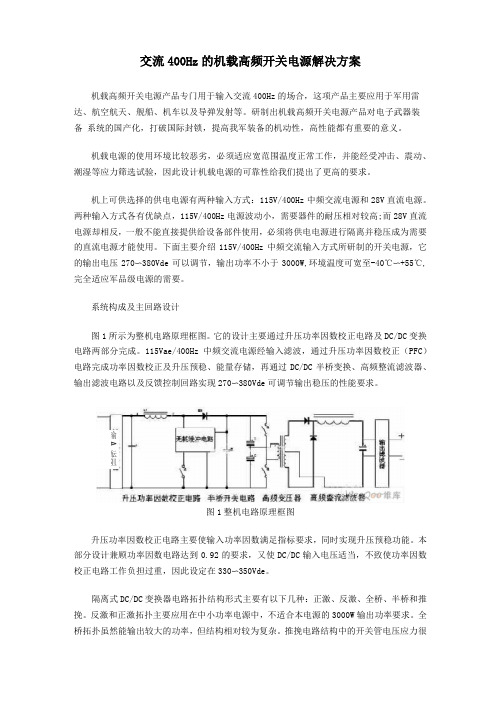
系统构成及主回路设计图1所示为整机电路原理框图。
它的设计主要通过升压功率因数校正电路及DC/DC 变换 电路两部分完成。
115Vae/400Hz 中频交流电源经输入滤波,通过升压功率因数校正(PFC ) 电路完成功率因数校正及升压预稳、能量存储,再通过DC/DC 半桥变换、高频整流滤波器、 输出滤波电路以及反馈控制回路实现270〜380Vde 可调节输出稳压的性能要求。
图1整机电路原理框图升压功率因数校正电路主要使输入功率因数满足指标要求,同时实现升压预稳功能。
本 部分设计兼顾功率因数电路达到0.92的要求,又使DC/DC 输入电压适当,不致使功率因数 校正电路工作负担过重,因此设定在330〜350Vde 。
隔离式DC/DC 变换器电路拓扑结构形式主要有以下几种:正激、反激、全桥、半桥和推 挽。
基于DSP与CPLD的400Hz中频电源设计
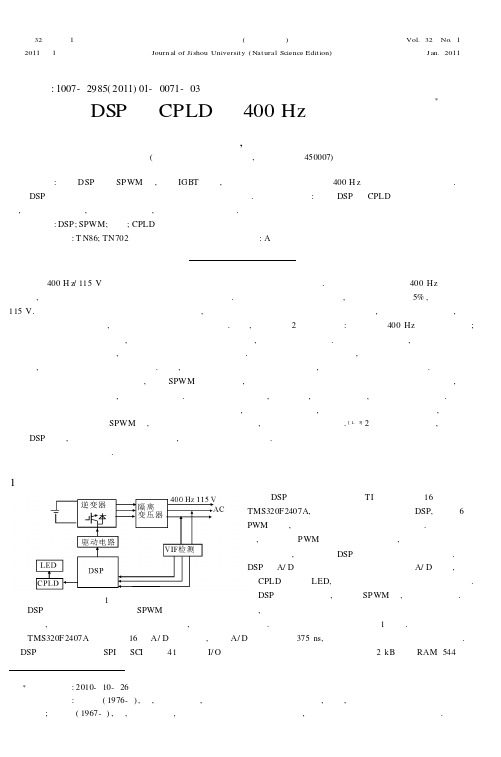
第32卷第1期吉首大学学报(自然科学版)Vol.32No .12011年1月Journ al of Ji shou Universit y (Nat ural Science Edit ion)J an.2011文章编号:1007-2985(2011)01-0071-03基于DSP 与CPLD 的400Hz 中频电源设计*裴素萍,王耕(中原工学院电子信息学院,河南郑州450007)摘要:利用DSP 产生SP WM 波,驱动IGBT 逆变,从而产生纯正弦交流电进行400H z 中频电源的研究与设计.给出了以DSP 为主控芯片的主电路、控制电路以及软件设计的流程.实验结果表明:利用DSP 与CPLD 使得控制电路大为简化,改善了功率因数,减少了谐波影响,从而提高了工作效率.关键词:DSP ;SPWM;逆变;CPLD中图分类号:T N86;TN702文献标志码:A三相400H z/115V 交流电源广泛应用于航天、航空及军用设备的动力系统中.逆变电源车是频率为400Hz 的交流中频电源,它在工业、国防、航海、航空等领域中应用非常广泛.它要求电源的波形是纯正弦,谐波含量不大于5%,工作电压为115V.该电源的频率、相位等参数的精度要求较高,对研制、生产的军用电源的参数需准确测试,使其满足军用标准,提高我国国防装备的科技水平,满足现代化高科技的发展需要.目前,该电源有2种产生方式:利用专用400Hz 发电机组产生;由工频电源经交直交变换,由电子电路控制大功率开关器件,经滤波变压后产生.对于发电机组来讲,由于发电机绕组的不对称性及转速不稳定性,都会使输出的频率及相位有误差.而对于电子方式产生的电源,受大功率器件特性及控制策略的影响,也会产生相移或频率不合要求.另外,电源在带载或三相作为单相运行时,也会引起相位或频率的变化.为了满足输出纯正弦波的要求,采用SPWM 脉宽调制技,该技术是通过一定的规律控制功率半导体器件的通断,获得一组等幅不等宽的矩形脉冲,用作近似正弦波.利用传统的模拟方法,电路复杂,有温飘的现象,限制了系统的性能.数字法则需要按照不同的数学模型用计算机计算出各切换点的时间,即所谓的规则采样,将采集的所有切换点放入内存,然后通过查表及必要的计算再生成SPWM 波,但数字法因受内存影响较大,不能保证系统的精度.[1-3]2种方法都不理想,因此笔者选用DSP 控制,逆变器输出三相正弦交流电,构成了静止式逆变电源.这种方法设计的中频电源具有噪音低、转换效率高、工作可靠、使用方便等优点.1系统结构组成图1系统结构图DSP 控制器选用TI 公司的16位定点TMS320F 2407A,它是一种性价比较高的DSP,集成6路PWM 输出,每个输出都有可编程的死区功能.与单片机相比,单片机的P WM 模块没有死区功能,必须用软件或外接硬件来实现,所以使用DSP 可以提高系统的可靠性.利用DSP 的A/D 可以实现对检测电流、电压的A/D 转换,再通过CPLD 译码送LED,从而显示电压、电流、频率的当前值.在DSP 的指令控制下,产生了SP WM 波,构成控制系统.DSP 不仅可以完成对输出的SPWM 波的脉宽、频率进行控制,还可以完成模拟信号的电压、电流以及交流电频率的检测和显示,当出现过电流、欠电压的异常现象时,能够自动保护、报警.电源车系统结构原理图如图1所示.TMS320F 2407A 还集成了16路A/D 转换通道,最快A/D 转换时间为375ns,可用于对电压和电流进行快速检测.这种DSP 还提供串行接口SPI 和SCI 模块、41个通用I/O 引脚、可编程看门狗定时器、片内集成了2kB 单口RAM 、544字双*收稿日期6作者简介裴素萍(6),女,河南新乡人,中原工学院电子信息学院讲师,硕士,主要从事电气控制与智能电网研究;王耕(6),男,河南郑州人,中原工学院电子信息学院副教授,主要从事电机电器设计与控制研究:2010-10-2:197-197-.口RAM 、32kB flash 程序存储器.TM S320F2407A 的最高工作速度可达40MIPS,高速的运算速度有助于实现先进的控制算法.三相脉宽调制波发生器构成的控制电路,产生SP WM 脉冲,经功率放大后驱动IGBT 功率模块组成的逆变器,生成频率为400H z 的正弦交流电,经变压器输出电压为115V.[4]2系统主电路图2主电路图中频电源车主电路的工作原理如图2所示.三相工频交流经EM I 滤波器滤波后,由整流桥模块整流,再经电容滤波,加至由IGBT 构成的桥式逆变电路,该直流高压经逆变电路逆变为脉宽按正弦波规律变化的高频脉冲波,再由输出滤波器滤掉高频谐波,得到中频正弦波,最后由变压器隔离、变压(升压或降压)后提供给负载.SPWM 脉冲波由主控制电路产生,并根据输出反馈电压和反馈电流来改变脉冲波的宽度,从而保证输出电压的稳定.三相逆变电路是将直流电逆变为400H z 的三相正弦交流电,主开关功率元件选用日本富士公司生产的两单元IGBT 模块(3只),额定容量为75A,每只元件上都另配缓冲保护电路.如图2所示,主电路是典型的AC-DC-AC 逆变电路,将输入的三相交流电经整流、滤波后以直流电供给逆变器.逆变器输出为三相交流电,频率为400H z,再经变压器隔离变压,就变为115V 的交流电.3系统控制电路图3控制电路图系统控制框图如图3所示.控制电路控制逆变电路和电源输出的频率及电压、人机界面、主电路和逆变电路的接通与断开.采用DSP 为系统的控制核心,控制快速准确,使系统具有响应快、运行稳定、可靠的特点.本系统控制器选用TI 公司16位定点T MS320F2407A,其产生载频为20kHz 的SPWM 脉冲信号,由脉宽调制信号输出端口输出,通过驱动电路加到IGBT 的栅极,控制逆变电路正常工作,同时根据电压和电流的反馈值调整SPWM 脉冲信号的脉宽,从而保持输出信号幅度的稳定.4系统软件图系统软件设计流程图系统软件设计流程图如图4所示,包括DSP 初始化、脉宽计算、报警、数值转换子程序、显示扫描程序等.其中按键1表示显示功能,按键2表示停机功能,按键3表示初始化功能.通过初始化命令可以对各参数值进行设定,并实施对主电路的控制,逆变出400H z 的三相交流电.程序流程采用顺序结构,调用子程序简单方便,显示子程序可将电压、电流、频率的数值送LED 分别显示出来.在整个工作过程中,随时对电流、电压进行测量比较,一旦出现过流、欠压可及时报警、严重时可以自动停机.SPWM 波产生的方法主要有3种:自然采样法,对称规则采样法和不对称规则采样法.利用正弦波和等腰三角波的交点时刻来决定开关管的开关模式,从而生成SPWM 波的方法是自然采样法,这种方法生成的SPWM 波的脉宽方程是一个超越方程,求解起来要花费较多的时间,因此自然采样法的数学模型不适合用于实时控制.对称规则采样法是以每个三角波的对称轴(顶点对称轴或底点对称轴)所对应的时间作为采样时刻过三角波的对称轴与正弦波的交点,作72吉首大学学报(自然科学版)第32卷4.平行t 轴的平行线,该平行线与三角波的2个腰的交点作为SP WM 波的开关时刻,这2个交点是对称的,因此称为对称规则采样法.这种方法实际上是用一个阶梯波去逼近正弦波,由于在每个三角波周期中只采样1次,因此计算得以简化,但其形成的阶梯波与正弦波的逼近程度仍存在较大的误差.不对称规则采样法在前2种方法的基础上改进了其不足之处,这种方法既在三角波的顶点对称轴位置采样,又在三角波的底点对称轴位置采样,即每个载波周期采样2次,这样采样所形成的阶梯波与三角波的交点不对称,所形成的阶梯波与正弦波的逼近程度大大提高.正是因为这点,本系统软件设计算法选择的是不对称规则采样法.用单片机作为控制器,软件设计则使用数字法受内存影响较大,不能保证系统的精度,笔者使用DSP 作为控制器可以避免这种缺点,保证系统的精度.5结语系统实验波形如图5所示.图5系统实验波形实践表明,利用DSP 与CPLD 使得控制电路大为简化,器件少、体积小,降低了成本.载波频率高,输出波形为纯正弦.经测试:电压稳定度小于1%,频率稳定度为0.05%,总谐波含量为1%,在200%的负载时,短路保护动作,可立即关闭电源,满足性能指标的要求,提高了系统的控制精度.采用厚膜驱动电路,具有自保护功能,使IGBT 逆变器的工作更加可靠.如果将逆变器作为变频电源使用,用于交流电动机的变频调速系统,只需改变DSP 初始化控制字的设定.改变输出交流电的频率和工作电压是十分方便的,省去了大量的编程工作,还能够做到实时控制,由于其波形是纯正弦,则可以改善功率因数,减少谐波的影响,从而提高工作效率.参考文献:[1]王福瑞.单片微机测控制系统设计大全[M].北京:北京航空航天大学出版社,2006.[2]李宏.电力电子设备用器件与集成电路应用指南[M ].北京:机械工业出版社,2003.[3]王晓明.电动机的DSP 控制[M].北京:北京航空航天大学出版社,2004.[4]冯玉生.单片机控制三相PWM 产生器的逆变电源设计[J].电力电子技术,2005,39(4):21-23.Design of 400Hz Mid Frequency Power SupplyBased on DS P and CPLDPEI Su ping,WANG Geng(Zhongyuan Univer sity of Technology,Zhengzhou 450007,China)Abstr act:The paper proposes a new way to obtain pure sinusoidal based on DSP for the research and de sign of 400H z AC power supply.It gives the main circuit,control circuit and software design flow chart.A prototype is designed using the DSP as the master chip.The experimental result shows that this way not only can simplify the system str ucture by DSP and CPLD,but also can improve the power factor,re duce harmonics and enhance efficiency.Key words:DSP;SPWM;invert;CPLD(责任编辑陈炳权)73第1期裴素萍,等:基于DSP 与CPLD 的400H z 中频电源设计。
基于八重逆变器的400Hz中频电源的研究与实现

值为 :
Ud=2 × 1 .1 7U2 C O S O t =2. 3 4U2 C O S ( E
可知 整流 电路输 出电压有 一定 的可 调范 围。 另外 ,由于 变 压 器 的 漏 感 抗 对 整 流 电路 的 影 响 ,对 最小 触发 角 统 也 有 限定 ,对 于 中小 功 率 系
取3 0 。~ 3 5 。 ,取 m i n = 3 0 。 时 ,可得 出 :
口 口 = —— — —一 :4 =斗 5。 3
电压 信 号 经 采 样 变 压 器 、A / D转 换 、C P U处 理 后
显示 输 出 。
其 中整 流 电பைடு நூலகம் 的输 出 U 要 求 为 4 0 V,所 以整
由于本 文仿 真 的中频 电源 的输 出功 率 P 出约为
l l :
。 =- 。
』 : . 。 。
1 K W ,所 以整流 电路 的输入 电流 为 :
,
1
图2 中频 电源 整 流 电 路 的 仿 真模 型
2= 一 3U 一 = 3
=3 一 X 2 4 1 7 4 6 _l 3 . 7 8 8 6A
Bas e d on 8 l n ve ̄ er s
梁 玲 梁建 伟 文教 普
( 江 西理 工 大 学 电 气工 程 与 自动 化 学 院 , 江 西赣 州 I 3 4 1 0 0 0 )
[ 摘要] 采用 交直 交 变频 方案 ,通过 多重移相 叠加技 术 ,进行 了八 重逆 变 器的 4 0 0 H z中频 电 源的设 计 。对整 流 电路 和八 重逆 变 器进 行 了参 数 计 算 和仿 真分 析 。利 用 MA T L A B / S i m u I i n k对 中频 电源 系统进 行 仿真模 型研 究 ,并开发 了八 重单相 桥 式 电压 型逆 变 器的 中频 电源 实验 模 型 。仿 真 和 实验 结 果表 明 :采 用 多重 移相 叠加技 术 ,可 以减 小谐 波含 量 ,有 效提 高输 出电源 的质量 。
基于交流调节器的400 Hz单相逆变器设计

基于交流调节器的400 Hz单相逆变器设计
【电源网】针对传统PI调节器对交流控制系统会产生静态误差和动态调节能力弱的问题,基于伺服控制系统中的直流调节器转交流调节器的理论,将一种新型交流调节器引入到逆变电源控制系统的调节器环节,对实际工程应用中高增益频带过窄问题进行了分析,并介绍了改进措施和参数选取依据。
通过设计基于该交流调节器的400 Hz单相逆变器的实验,验证了采用该方法得到的交流调节器可消除静态误差并具有快速的动态调节特性。
1 引言
关于逆变器控制技术,传统逆变器采用电压有效值外环控制,只能实现输出电压有效值的恒定控制,不能保证输出电压波形质量,并且在非线性负载条件下,输出电压谐波含量大且波形严重失真。
同时,电压有效值外环控制的动态响应速度较慢。
其原因是传统PI调节器只能对直流信号做到稳态时的零误差调节。
为实现供电设备稳态精度高、动态响应快的优良性能,现代逆变电源大多采用瞬时值反馈控制,解决了系统动态响应较慢的问题。
但这种控制方法的给定信号和输出信号都是正弦交流信号,若直接使用传统PI调节器依然存在稳态误差。
因此需要寻找一种静态交流调节器,它能直接作用于交流信号,并能获得零相位和幅值的误差。
基于上述分析,将伺服系统中直流调节器转交流调节器的理论应用于逆变器的控制系统,提出一种新型静态交流调节器,并将其应用于400 Hz单相逆变器的控制,通过实验验证了该调节器动态响应快且可以消除交流控制系统中的静态误差。
2 交流调节器设计
2.1 交流调节器原理。
一种改进的400Hz逆变器重复控制策略

较快 , 且简单 实用 的特 点。
关 键词 : 变器 ;有源 阻尼 :重复控 制 逆 中图分类号 :M4 4 T 6 文献标识码 : A 文章 编号 :0 0 10 2 1 )7 0 1— 2 10 — 0 X(0 2 0 — 0 2 0
An I p o d Re ttv nt o r t g o 0 Hz I v r e m r ve pe ii e Co r lSt a e y f r 40 n e t r Ba e o tv m pi g s d n Ac i e Da n
B sd o cie d mpn ti me o a ste ocl t n n te O tu C ftro n etr u d ru la rl h ae n at a ig,hs v t d d mp h si ai so h Hp tL l fiv re n e no d o i t h o i e g
虚 拟 出 并 联 于 电容 上 的 电 阻 . 现 增 大 系 统 阻 尼 实
的 目 的 , 良受 控 对 象 。 而 简 化 重 复 控 制 补 偿 改 从 器 设 计 , 即仅 需 一 个 带 宽 足 够 大 的 二 阶 滤 波 器 ,
而 无 需 传 统 的 陷波 滤 波 器 或 设 计 过 程 复 杂 的 FR I
一
种 改 进 的 4 0 H 逆 变 器 重 复 控 制 策 略 0 z
可 采 用 有源 阻 尼 控 制 算 法 虚 拟 滤 波 电容 并联 电阻 R [, 体 实 现 即 在 重 复 控 制 外 环 基 础 上 引 ]具 4 入 电容 电压 的微 分 反 馈 , 由图 2可 见 , 种 算 法 亦 这 能如 无 源 阻尼 方 法 一 样 。 强系 统 阻尼 。 制 逆 变 增 抑
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
影响
由图 1 很容易得到空载逆变器的传递函数
Go (s) = 1/(LCs2 + 1)
(1)
这是一个欠阻尼二阶系统 动态性能较差 在
截止频率处系统会有振荡 系统的稳定裕度也很
小 为了增强系统的动态性能和稳定性 需要引入
反馈控制 本文提出的控制方案包括电感电流环
输出电压环和最外层的输出电压幅值环
iL
i0
KEY WORDS: power electronics; inverter; medium frequency power supply; output control; parallel operation control
摘要 中频电源由于其较高的输出频率 要想得到较好的输 出电压波形和较大的输出功率 则比工频逆变器的控制更加 困难 针对 400Hz 中频逆变器的特点 给出了一种带幅值 环的双闭环单相逆变器控制策略 得到了很好输出波形 并 提出了一种介于有线和无线并联控制方法之间的共享同步 信号的外特性下垂控制方法 以及用于消除直流环流的直流 偏置电压下垂方法 将上述方法应用于中频逆变电源的并联 运行控制 取得了很好的均流效果 介绍了该方案的理论依 据 并搭建了两台 1.5kW 的实验样机 实验结果证明了该 方案的有效性
XIE Meng, CAI Kun, SHENG Xiao-song, WANG Ping, LI Yao-hua
(Institute of Electrical Engineering Chinese Academy of Science, Haidian District,Beijing 100080,China)
出电压对电流环的扰动 图中 Kv Kc 分别为电压环 和电流环的比例系数
由图 2 可得到输出电压对给定参考电压的传递 函数为
Uc U ref
=
LCs2
+
Kv Kc KcCs
+
Kv Kc
(2)
由式(2)可得空载下系统的幅值静差
1 − Uc ( jω) = 1 − Uref ( jω )
Kv Kc (Kv Kc − LCω 2 )2 + (KcCω )2 (3)
uref Uc -
PI
×
uref P(s)
uc
sinωt
x
图 3 带幅值环的控制结构框图 Fig. 3 Structure of Controller with amplitude loop
2 逆变器并联运行控制方案
2.1 并联系统模型的建立和环流分析 逆变器并联运行是一个提高电源系统容量和
稳定性的有效方式 也是电源系统模块化的有效途 径 但由于其输出阻抗较小 很容易在不同逆变器 之间产生环流 所以控制算法的主要目的就是消除 环流 本文采用一种共享同步信号的外特性下垂并 联控制方法
学科分类号 470⋅40
400Hz 中频单相电压源逆变器的 输出控制及其并联运行控制
谢 孟 蔡 昆 胜晓松 王 平 李耀华
中国科学院电工研究所, 北京市 海淀区 100080
Output Control and Parallel Operation Control of 400Hz Single-phase Voltage-source Inverter
负载电流扰动
u_ c
iL _
1/sL +
输出电压解耦
uc 1/sC
控制器
逆变器物理系统
图 2 电感电流环和输出电压环控制框图 Fig.2 Control chart of inductance current loop and output
voltage loop
1.3 输出电压幅值环 图 3 为带有幅值环的系统控制框图 其中 P(s)
关键字 电力电子 逆变器 中频电源 输出控制 并联运 行控制
0 引言
400Hz 交流电源属于特种电源范畴 多应用在 船舶 武器装备等非民用场合 这种电源的核心就 是逆变器 其必须具备输出高质量电压波形的能 力 而由于其使用场合的特殊性 又需要其有足够 的输出功率和较高的稳定性[1-2]
逆变器输出控制有很多方案 其中双闭环控制 以其控制器设计简单 输出电压波形失真小 动态 响应速度快等优点 得到了广泛的应用[3-6] 但是这 种双闭环控制方案采用 PI 调节器 跟踪信号为快速 变化的正弦波 而单相逆变器又不能象三相系统那 样进行坐标变换 这样普通的 PI 调节器就无法消除 静态误差 如果加大比例作用 则能减小系统静差 但因现在的控制系统都采用数字控制 所用信号都 存在量化误差 所以再大的比例作用也不能完全消 除静差 而系统的稳定性还会随着比例系数的增大 而降低 在相同的采样频率下 400Hz 的逆变器较 之工频(50Hz)逆变器 在一个周期内的采样点少 8 倍 控制精度大大降低 系统静差就更难消除 针 对 400Hz 的特点 本文在传统双闭环的基础上 采 取一个外加的幅值环来消除系统静差[1]
为设计好的双环控制系统
图中的幅值环将给定参考电压的幅值与逆变
器实际输出电压的幅值相比较 采用 PI 型调节器 该调节器调节的是一个直流量 由于 PI 型调节器对 阶越指令的无差调节作用 可以消除系统的幅值静
万方数据
80
中国电机工程学报
第 26 卷
差 幅值环的输出与标准正弦信号相乘的结果作为 2.2 中所述双闭环的参考电压
1 带有幅值外环的双闭环控制方案
1.1 单相逆变器的主回路
单相逆变器的主回路结构如图 1 所示 图中
Ud 为直流母线电压 ui 为滤波器输入电压 u0 为逆 变器输出电压 iL 为电感电流 iC 为电容电流 i0 为负载电流 L C 分别为滤波电感和电容 不考
虑输出电感的等效电阻和死区等各种阻尼因素的
式(4) (5)给出了 U1 U2 的表达式
ቤተ መጻሕፍቲ ባይዱ
U!1 = E!ac1 + Edc1 = E ⋅ cosωt + Edc1
(4)
U!2 = E!ac2 + Edc2 = (E + ∆E) ⋅ Cos(ωt + ϕ ) + Edc2 (5)
式中 ∆E 和ϕ分别是输出电压的幅值差和相位差
Edc1 和 Edc2 分别是两个输出电压的直流偏置
第 26 卷 第 6 期 2006 年 3 月
文章编号 0258-8013 (2006) 06-0078-05
中国电机工程学报 Proceedings of the CSEE
中图分类号 TM71 文献标识码 A
Vol.26 No.6 Mar. 2006 ©2006 Chin.Soc.for Elec.Eng.
以两个逆变器并联为例 它们的简化电路如图 4 所示 其中 U1 U2 是两个逆变器的输出电压 Z1 Z2 是它们的输出阻抗 ZL 是负载阻抗
在实际应用中 即使是同一型号的逆变电源的 输出电压也不可能在任意时刻都保持一致 它们会 有如图 5 所示的各种差别 电压差不但包括幅值差 和相位差 还包括直流偏置的细微差别
Ic
I1
I2
Z1
ZL
Z2
U1
IL U2
逆变器 1
负载
逆变器 2
Fig. 4
u
图 4 两个逆变器并联等效电路图 Equivalent circuit diagram of parallel operation of
two inveters
u2
u1
E1 E2
t Edc2 Edc1
Φ
图 5 两逆变器输出电压比较 Fig. 5 Compare of output voltage of two inverters
由式(3)可以看出 随着两个比例系数的增加
系统的静差不断减小 但是无法做到无静差 而且
系统的频率特性决定了比例系数不可能很大 为了
消除静态误差 得到更好的稳态波形 本方案在电
流电压双环的基础上引入了一个幅值环 它位于双
环的外层 对稳态波形质量进行控制
uref
+ _
Kv uC
i*L
+
iL _
+
Kc uc +
万方数据
第6期
谢 孟等 400Hz 中频单相电压源逆变器的输出控制及其并联运行控制
79
的环流[7] 必须采取并联控制策略来抑制环流 以 保证并联系统的稳定运行 现有的控制策略主要分 为有线方案[8-11]和无线方案[12-14]两类 有线方案需 要在逆变器之间交换各自的一些信息(比如输出电 流或功率等) 逆变器利用其他逆变器的信息 来调 整自身的输出 达到各逆变器均分输出电流的目 的 而这种方案 需要在各单元之间交换数据 所 用的通讯线路不可避免的会受到干扰 将噪声引入 了控制系统 无线方案避免了一切控制上的相互连 接 仅仅利用本单元的输出信息调节逆变器的外特 性倾斜度(即调节输出阻抗) 达到均流控制的目的 无线方案完全通过外特性下垂来实现各逆变器输 出电压相位上的同步 但是对于 400Hz 的电源来说 一个周期只有 2.5ms 受到功率器件开关频率和数 字处理器处理速度的限制 一周期内的采样点有 限 导致了数字控制本身的相位量化误差 仅仅依 靠外特性下垂来实现相位同步是很困难的 本文提 出了一种介于有线和无线之间的一种方案 各单元 共享一个由定时器发出的 400Hz 同步信号 各逆变 器的参考正弦电压信号与该同步信号同步 同步信 号通过光纤传播 既可以远距离传输 又不会受到 其他信号的干扰 由于这一同步信号的存在 各逆 变器可以保持参考电压的频率和相位一致 再通过 外特性下垂方案来调整各自实际输出电压的幅值 和相位 使各单元均分输出电流 文中称这种控制 策略为共享同步信号的外特性下垂并联控制方法 该方案在两台 1.5kW 的单相 400Hz 逆变器上进行实 验验证 取得了满意的结果