用于电机传动系统的多逆变器并联控制技术
用于电机传动系统的多逆变器并联控制技术
c a a trsi s h r ce t .e tr ;moo rv y wo d a alli v re s tr d ie;ma t rsa e c n rl u r n h rn se — lv o to ;c re ts a g i
关 键词 :并联 逆 变 器;电机 传 动 ;主从控 制 ;均流控 制
中 囤分 类 号 : M4 T 6 文 献标 志码 : A 文章 编 号 :10 — 4 X(0 0 0 — 06 0 0 7 4 9 2 1 )2 0 3 — 5
Pa a llt c n q e o u tp e i v r e s f r m o o i e s s e s r l e h i u fm li l n e t r o t r drv y t m e
O 引 言
在 大功 率 电 机 传 动 系 统 中 , 大 逆 变 器 容 量 扩 的 技术 途 径 主 要 有 多 相 化 技 术 ¨ 、 电平 技 术 和 j多 多逆 变器 并 联 运 行 技 术 , 中 多 逆 变 器 并 联 技 术 其 立 足于成 熟 的 三 相 电 机 传 动 系 统 的 控 制 技 术 , 易
第 1 4卷
第 2期
电 机 与 控 制 学 报
ELECTRI M ACHI C NES AND C0NTR0L
Vo.1 No 2 1 4 .
21 0 0年 2月
总复习题与各章内容摘要(学生版02)

选择题一、1.当理想空载转速no一定时,机械特性越硬,静差率S___。
A.越小B.越大C.不变D.可以任意确定2.当系统的机械特性硬度一定时,如要求的静差率S越小,调速范围D___。
A.越大B.越小 C.不变D.可大可小3.晶闸管一电动机系统的主回路电流断续时,开环机械特性___。
A.变软B.变硬C.不变D.变软或变硬4.在转速负反馈系统中,闭环系统的静态转速降减为开环系统静态转速降的___倍。
A.1+K B。
l+2K C.1/(1+2K) D.1/(1+K)5.转速负反馈调速系统对检测反馈元件和给定电压造成的转速扰动___补偿能力。
A.没有B.有C.对前者有补偿能力,对后者无D.对前者无补偿能力,对后者有6.调速系统的调速范围和静差率这两个指标___。
A.互不相关B.相互制约C.相互补充D.相互平等7.调试时,若将比例积分(PI)调节器的反馈电容短接,则该调节器将成为( )A.比例调节器B.积分调节器C.比例微分调节器D.比例积分微分调节器8.调速系统的静差率一般是指系统在()时的静差率。
A、高速时B、低速时 C 、额定转速时9无静差调速系统中必须有()。
A、积分调节器B、比例调节器C、微分调节器10.转速负反馈有静差调速系统中,当负载增加以后,转速要下降,系统自动调速以后,可以使电动机的转速()。
A、等于原来的转速B、低于原来的转速C、高于原来的转速D、以恒转速旋转11.转速负反馈调速系统对检测反馈元件和给定电压所造成的转速降()。
A、没有补偿能力B、有补偿能力C、对前者有补偿能力,对后者无补偿能力二、1.速度、电流双闭环调速系统,在突加给定电压起动过程中第1、2阶段,速度调节器处于___状态。
A。
调节B.零C.截止D.饱和2.双闭环调速系统包括电流环和速度环,其中两环之间关系是___。
A.电流环为内环,速度环为外环B.电流环为外环,速度环为内环C.电流环为内环,速度环也为内环 D..电流环为外环,速度环也为外环3.在转速、电流双闭环调速系统调试中,当转速给定电压增加到额定给定值,而电动机转速低于所要求的额定值,此时应___。
微电网系统中多种逆变器的并联组网控制策略

微电网系统中多种逆变器的并联组网控制策略张明光;张义娜;孙慧丽;郭得政【摘要】采用氢燃料蓄电池单体的串并联组成的电池模块作为储能系统中的主要储能装置,多种逆变器连接在同一条公共线上.在微电网处于孤岛运行模式时,考虑到储能单元的逆变器间环流的存在、不同设备控制器的不同工作特性、低通滤波嚣存在的影响,提出新的下垂控制理论.利用逆变器模拟同步发电机的频率调节特性,保证负荷发生变化时微电网频率的稳定性;利用静止无功补偿器SVC补偿系统无功,以保障系统电压的稳定,进而实现多种逆变器的组网运行.利用PSCAD仿真软件进行仿真,验证对所建立的模型采取的一系列控制策略的有效性和正确性.【期刊名称】《兰州理工大学学报》【年(卷),期】2014(040)004【总页数】6页(P86-91)【关键词】孤岛运行;下垂控制;频率调节;SVC;PSCAD/EMTDC【作者】张明光;张义娜;孙慧丽;郭得政【作者单位】兰州理工大学电气工程与信息工程学院,甘肃兰州730050;兰州理工大学电气工程与信息工程学院,甘肃兰州730050;河南省濮阳供电公司,河南濮阳457000;新疆神火炭素制品有限公司,新疆乌鲁木齐830000【正文语种】中文【中图分类】TM76随着资源的紧缺、负荷的持续增加,风能、太阳能等可再生能源的分布式发电技术已在世界各国得到迅猛发展.微电网是将分布式发电、负荷、储能设备及控制装置等结合,形成的一个单一可控的控制系统.微电网可以运行于孤岛/并网模式,大电网出现严重故障时,微电网孤岛运行,储能系统作为主供电电源来维持系统的正常稳定运行.无疑储能逆变器的控制策略是微电网电能质量综合考究的问题.目前,对逆变器控制策略研究已相当成熟.文献[1]在虚拟同步发电机(VSG)一次电压控制器的基础上,提出了一种在线计算电压控制新算法,但VSG的同步电抗不能无限制增加.文献[2]采用传统的PQ下垂控制理论,该方法对于多台逆变器并联运行时,输出电压频率和幅值精度不能得到很好的保障.文献[3]提出了基于虚拟频率-电压的下垂控制,这种方法要求多个并联逆变器转换角相同,其实现条件苛刻.文献[4]通过引入感性虚拟阻抗,提出一种适合微电网多逆变器并联的电压电流双环下垂控制策略;但文中在多个逆变器并入系统的瞬间逆变器间所产生的环流较大,其消除时间也较长.文献[5]对于多逆变器提出了环链控制法,下级逆变器的电流参考信号由上级逆变单元提供;然而,链环的存在使得该控制策略不能实现热插拔.基于上述情况,有必要研究如何更为全面地建立储能系统逆变器的控制策略.本文针对大电网出现故障时,建立基于微电网孤岛运行时的模型.通过引入新的功率变量,实现多逆变器间的控制解耦;再次考虑到逆变器之间环流、不同设备的不同工作特性、低通滤器的影响,设计出新的下垂控制方案;模拟同步发电机的频率调节特性,增添静止无功补偿器SVC,实现微电网的频率无差调节、电压的调整.最后通过PSCAD/EMTDC仿真软件搭建仿真模型来验证提出的控制策略.1 储能系统的构成及燃料电池的数学模型分布式发电并网方式运行时,一般不需要储能系统,但在孤岛运行时,为保持小型供电系统的频率和电压的稳定,储能系统往往是必不可少的.分布式发电的储能技术主要包括蓄电池储能、飞轮储能、超级电容储能、压缩空气储能和蓄水储能等. 电池类储能装置自损耗小,能量存储时间长;但响应速度慢,循环寿命短.在大量储存可再生能源发电时,作为备用电源对负荷进行供电.本文采用蓄电池储能,同时小型汽轮发电机作为微电源对能量进行即时补偿.对于蓄电池储能,采用氢燃料电池单体的串并联来组成一个电池模块.氢作为重要的二次能源,燃烧时不会释放CO x、NO x、SO x气体和粉尘等污染物.氢通过可再生能源产生,整个循环过程实现了无有害物质排放、清洁无污染.在储能系统中,由于氢燃料电池输出的直流电压一般不高且变化范围较大;而燃料电池分布式并网发电系统中,需要采用电力电子变换电路实现由不稳定直流电能向稳定交流电能的转换.本文氢燃料电池发电系统采用两级结构——DC/DC变换和DC/AC变换,如图1所示.氢燃料电池输出的直流电压一般不高,采用Boost直流升压变换器(如图2所示)来提升氢燃料电池输出电压.图1 氢燃料电池两级并网发电系统结构Fig.1 Two-stage grid-connected power generation system structure with hydrogen fuel cell图2 Boost直流升压变换器Fig.2 Boost converter for DC voltage boosting2 蓄电池多储能系统接入微电网的组网控制策略研究2.1 储能系统中三相逆变器的建模与设计单台三相逆变器结构如图3所示,图中C f和L f分别为滤波电容和电感,r为线路电阻.图3 三相逆变器主电路Fig.3 Main circuit of three-phase inverter由图3得三相逆变器的模型:式中:i=A,B,C,分别指 A、B、C相;u k i为滤波前的逆变器输出电压;u o i为滤波后逆变器的输出电压;i L i和i o i分别指电感电流和输出电流.经过派克变换,式(1)在旋转坐标系下的表达式如下式所示:此处采用电压外环、电流内环的双闭环控制方式,所以三相逆变器在dq旋转坐标系下是耦合的,经过解耦的双闭环控制框图如图4所示.图4 三相逆变器电压电流双闭环解耦控制框图Fig.4 Block diagram of decoupling control of voltage-circuit dual-loop with three-phase inverter 根据储能系统中逆变器在孤网模式下工作时的特点,孤网运行时,储能系统作为主力供电单元为负载提供电能,对频率的保持和电压的稳定有更高的要求,故此处选用电压外环电感电流内环的双闭环控制方式[6-7].ωL f i Ld和ωL f i Lq作为解耦项使得无功电流和有功电流可以实现独立的控制.电压电流双环控制充分利用了系统的状态信息,不仅动态性能好,稳态精度也较高.2.2 两储能单元的逆变器并联模型对于多个储能单元的系统,采用多逆变器连接在同一条公共线上.以两个储能单元的逆变器并联为例,其结构图如图5a所示,等效电路如图5b所示.图5 逆变器并联主电路Fig.5 Main circuit of parallel-connected inverters在计算逆变器的功率时采用逆变器输出端电压.根据基尔霍夫定律,由图6可以推导出负载端的电压利用式(3)可以得出第一台逆变器输出电流的向量表达形式:由此可以得到第一台逆变器发出的复功率:其中:a、b、c、d是由线路阻抗组成的参数表达式.由式(5)可以看出,逆变器的有功功率P和无功功率Q不仅与E 1和E 2有关,也与θ1和θ2有关.说明多逆变器的控制之间存在着耦合关系.2.3 改进的下垂控制理论下垂控制是对系统中每个供电电源进行实施的,可以在电源电压最小限度偏离参考电压的情况下实现电源按额定功率比例分配给负载.功率下垂控制是实现多机稳定并网的主要控制策略.1)为了有类似于分别单台非并联逆变器的控制特性,引入新的变量[8-9].定义如下:通过做差得到:为明确控制量与被控制量之间的关系,实现P 1t和P 2t的差值只与两台逆变器输出电压的相位差有关,Q1t和Q2t的差值只与电压的幅值差有关.令根据上述推导,确定下垂控制方式为2)由于上述控制量是新定义的下垂控制量,则无法保证电源按额定功率比例分配给负载,不能消除逆变器之间环流的流动.不同额定容量微电源的微网中,环流大小是衡量系统功率分配精度的重要指标.若逆变器间环流为零,根据基尔霍夫定律有:由式(11)可知,逆变器的各个输出阻抗与连线阻抗不同时,希望通过下垂法将该逆变器的输出电压也做相应调整;将输出功率小的逆变器的电压幅值下垂系数减小,可以增大其输出压降.由此出发,把功率的一次方引入到下垂系数.同时,储能系统除蓄电池蓄能外,还包括飞轮储能、超级电容储能,以及小型汽轮发电机等为电源.综合考虑到微电网中不同设备控制器的工作特性,把二阶功率引入下垂系数中.还要对低通滤波进行补偿,加入微分环节来提高系统响应速度[10-11],来更好地实现微网的精确、稳定运行.由此出发,提出新的下垂控制方程:改进后的下垂算法实现了系统运行的自适应调整.当检测到功率变化时,根据实际输出功率的大小自动对下垂量进行动态调节.2.4 频率、电压的调整多个储能单元同时大量投入运行时,多数情况微电网处于孤岛运行模式.此时,为保持微电网的正常运行,要保证微电网电压和频率在要求范围内.1)频率的调整.对于改进后的逆变器的下垂控制特性,当负荷功率发生变化时,逆变器被分配的功率发生了变化,此时逆变器的频率将不再是额定频率,这说明上述下垂控制方式不能保持频率的稳定性.借鉴同步发电机的频率调节特性曲线[12],设置逆变器的控制特性曲线如图6所示.其调节过程为:逆变器初始工作点为A点,当负荷增加时,逆变器工作点沿曲线1移动至B点;此时如果将曲线保持斜率不变向右平移,使逆变器工作点变为C点,则可使频率回复至f ref,即逆变器工作在曲线2,功率缺额由小型汽轮发电机来提供,实现了储能逆变器的无差调频.图6 逆变器的频率调整曲线Fig.6 Frequency adjusting curve of inverter2)电压的调整.上述改进的下垂控制理论中,逆变器阻抗大的端电压大些,这也导致了逆变器间电压的差值.通过静止无功补偿器SVC补偿无功,来达到逆变器间电压差值为零的目的[13-15].逆变器容量足够大时,在发送一定有功功率的情况下,无功功率受到有功功率和传输线路的限制.氢燃料储能蓄电池组逆变器发送的有功功率与氢燃料电池的单元数、串并联方式等因素有关.当有功功率满足负荷要求时,SVC补偿的无功功率Qj为其中:Q o1、Q o2分别为氢燃料蓄电池的逆变器提供的有功功率,Qq为小型汽轮发电机发出的有功功率.则SVC补偿能量极限为选取SVC的容量范围为3 仿真与实验为进一步验证所提出控制策略的正确性,本文设计开发了实验平台,实验平台配置如图7所示.储能系统包括两组不同的氢燃料蓄电池组组成的子系统、一台微型汽轮机、静止无功补偿装置SVC.氢燃料蓄电池组通过氢燃料蓄电池单体的串并联组成.负荷主要包括一台感应电机、阻抗负载、卸荷负载与无限大电网共同构成.图7 实验平台配置图Fig.7 Arrangement of experiment platform本文采用仿真软件PSCAD/EMTDC对前面改进的下垂控制策略以及系统频率、电压的稳定性所采取措施的可行性和正确性进行仿真验证.具体参数如表1所示.表1 系统参数设置Tab.1 Setting of system parameters电网线电压运行频率滤波电抗滤波电容额定功率400 V 50 Hz L 1=1.2 m H L 2=0.6 m H C1=C2=1 500μF P o1=200 W P o2=400 W仿真过程为:两个储能单元的逆变器并网、离网、满载动态改变过程.釆用传统下垂控制和改进的一系列控制策略进行两次仿真.观测单台逆变器的频率输出、电压输出和功率输出动态特性.逆变器在t=2 s时并入电网,t=5 s时发出有功功率120 W,无功功率50 W,在t=10 s时电网电压下降5%,在t=15 s时联网模式转为孤岛模式,控制方式由并网运行时的电流控制转为电压电流双闭环控制.t=20 s半载加至满载.随后采用改进后的一系列控制策略重复上述步骤.仿真结果如图8所示.由图8a可见,当t=20 s半载加至满载时,逆变器被分配的功率发生了变化,逆变器的频率将不再是额定频率,加入虚拟同步发电机的控制环节,频率的稳定性有了很大改进.由图8b可见,在t=15 s时并网模式转为孤岛模式,t=20 s半载加至满载,当检测到功率变化时,根据实际输出功率的大小自动对下垂量进行动态的调节;加之通过静止无功补偿器SVC补偿无功,实现了逆变器的电压基本稳定的目的,同时,也保证了多个逆变器间电压差值近乎为零的要求,进而进一步确保了逆变器间无环流的流动.图8c中,在t=15 s时,微电网由并网转为孤岛模式运行,此时逆变器间的有功、无功要进行重新分配,由于SVC的加入,逆变器无功波动有所减少,使得逆变器对无功的输出明显减少,这也进一步削弱了逆变器间无功电流的流动.由于有功、无功的相对稳定,根据改进的新的下垂控制方程,进而确保了当大电网发生故障时,微电网进入孤岛模式的稳定运行,保证了微电网额定的电压和频率.图8 传统、改进下垂控制下逆变器输出系列仿真波形Fig.8 Serial simulation waveforms of inverter output with traditional and improved droop controls 由图8d可见,虚拟同步发电机控制模型和改进下垂控制器的采用使得环流抑制效果更好,模式切换和负荷变动条件下环流问题得到了改善,证明没有过多的潮流消耗在两逆变器连接线路阻抗上,改善了负荷功率分配,保障了微电网的供电质量.4 结论采用氢燃料蓄电池单体的串并联组成的电池模块作为储能系统中的主要储能装置.根据微电网自治运行时并联系统的特点,得出了改进后的下垂控制算法,该算法在微电网处于孤岛运行模式时,去除了储能逆变器间存在的环流,避免了不同设备控制器的不同工作特性、低通滤波器存在的影响.通过逆变器模拟同步发电机的频率调节特性,添加静止无功补偿器SVC补偿系统无功,确保了负荷发生变化时微电网频率的稳定、系统电压的稳定,进而实现了多储能逆变器的并联组网运行.仿真和实验结果表明,改进后的多储能逆变器的并联组网控制策略可有效避免微电网中新能源发电间歇不稳定的问题,从而提升了其供电质量和能量利用效率.参考文献:[1]杨向真,苏建徽,丁明.面向多逆变器的微电网电压控制策略[J].中国电机工程学报,2012,32(7):7-13.[2] ZHONG Qingchang,GEORGE W.Synchronverters:inverters that minic synchronous generators[J].IEEE Transactions on Industrial Electronics,2010,58(4):1259-1267.[3] LI Yan,LI Yunwei.Decoupled power control for an inverter based low voltage microgrid in autonomous operation [C]//IEEE 6th International Power Electronics and Motion Control Conference.Wuhan:[s.n.],2009:2490-2496.[4]张庆海,彭楚武,陈燕东,等.一种微电网多逆变器并联运行控制策略[J].中国电机工程学报,2012,32(25):126-132.[5] WU T F,CHEN Y K,HUANG Y H.3C strategy for inverters in parallel operation achieving an equal current distribution[J].IEEE Transactions on Industrial Electronics,2000,47(2):273-281.[6]郜登科,姜建国,张宇华.使用电压-相角下垂控制的微电网控制策略设计[J].电力系统自动化,2012,36(7):29-34.[7]王成山,肖朝霞,王守相.微网中分布式电源逆变器的多环反馈控制策略[J].电工技术学报,2009,24(2):100-107.[8]阚志忠,张纯江,薛海芬.微网中三相逆变器无互连线并联新型下垂控制策略[J].中国电机工程学报,2011,31(33):68-74.[9]张纯江,王晓寰,薛海芬,等.微网中三相逆变器类功率下垂控制和并联系统小信号建模与分析[J].电工技术学报,2012,27(1):32-39.[10] WANG Peng,LIU Xiong,JIN Chi.A hybrid AC/DC microgrid architecture,operation and control [C]//IEEE Power and Energy Society General Meeting.Detroit:[s.n.],2011.[11]吕志鹏.多逆变器型微网运行与复合控制研究[D].长沙:湖南大学,2012.[12]时珊珊,鲁宗相,闵勇,等.无差调频过程中微电源功率分配策略设计[J].电力系统自动化,2011,35(19):23-27.[13]彭思敏,曹云峰,蔡旭.大型蓄电池储能系统接入微电网方式及控制策略[J].电力系统自动化,2011,35(16):38-43.[14]龙源,李国杰,程林,等.利用光伏发电系统抑制电网功率振荡的研究[J].电网技术,2006,30(24):44-49.[15]孙孝峰,吕庆秋.低压微电网逆变器频率电压协调控制[J].电工技术学报,2012,27(8):77-84.。
多电平逆变器的工作原理、控制方法以及仿真

目录第一章绪论 (1)1.1多电平逆变器的背景 (1)1.2多电平逆变器的研究现状 (2)1.3多电平逆变器的应用 (3)第二章多电平逆变器的种类介绍 (6)2.1二极管箝位式多电平逆变器及其优缺点 (6)2.2电容箝位式多电平逆变器及其优缺点 (6)2.3H桥级联式多电平逆变器及其优缺点 (7)第三章多电平变换器PWM调制策略 (8)3.1多电平变换器PWM调制策略的分类 (8)3.2多电平SPWM调制策略 (9)3.2.1 SPWM调制策略 (9)3.2.2 载波垂直分布多电平调制策略 (9)3.2.3 载波水平移相多电平调制策略 (10)3.2.4多载波SPWM调制策略谐波分析 (10)3.3多电平SVPWM调制策略 (46)3.3.1 SVPWM调制策略 (46)第四章多电平逆变器中的电压平衡技术 (48)第五章三电平中点箝位型逆变器SPWM控制策略与仿真 (53)5.1三电平NPC逆变器SPWM方法 (53)5.2基于MATLAB的三电平NPC逆变器SPWM仿真 (54)5.2.1仿真系统整体框图 (54)5.2.2 基于载波反向SPWM带电机负载的仿真模块 (55)5.3基于载波同向SPWM带电机负载的仿真模块 (57)5.3.1 SPWM开关信号的发生模块 (57)5.3.2仿真结果与分析 (57)5.4基于注入三次谐波的SPWM带电机负载的仿真模块 (58)5.4.1 SFOPWM开关信号的发生模块 (58)5.4.2仿真结果与分析 (58)5.5三电平NPC逆变器SPWM的实验结果 (59)5.6小结 (59)第六章总结展望 (60)第一章绪论1.1 多电平逆变器的背景电力电子技术自二十世纪50年代诞生以来,经过近半个世纪的飞速发展,至今已被广泛应用于需要电能变换的各个领域。
在低压小功率的用电领域,电力电子技术的各个方面己渐趋成熟,将来研究的目标是高功率密度、高效率、高性能;而在高压大功率的工业和输配电领域,各个方面的技术正成为当今电力电子技术的研究重点。
多相变频调速技术的现状和发展方向
多相变频调速技术的现状和发展方向目前中大功率交流传动系统的用电量占所有电气传动系统用电量的70%,另外由于电压源型逆变器具有功率因素高的优点,所以采用中大容量电压源型逆变器的电气传动系统受到人们的特别关注[1]。
但是由于电力电子功率器件功率等级的限制,目前两电平电压源型逆变器的功率等级还只限于大功率的低端[2]。
为了实现大功率电压源型逆变器电气传动系统,多电平结构在供电电压为中高压的场合得到了广泛应用。
但在供电电压本身受限制的大功率应用场合,例如水下舰船电力推进,则必须寻求其它的结构形式。
此外人们对电气传动系统可靠性也提出了更高的要求,希望系统具有更好的容错运行能力。
为了在较低电压下实现同样功率等级的交流传动系统,并提高系统可靠性,多相电机的变频调速系统作为大功率、高可靠性驱动系统的解决方案之一应运而生。
在二十世纪80年代以前,当时的技术条件严重束缚了多相电机驱动系统的研究与应用。
直到近二三十年来,现代电力电子技术、微电子技术和现代电机控制理论的迅速发展使得高性能多相电机驱动系统的实现成为可能,其优势才得以充分发挥,应用范围迅速扩大。
例如在舰船推进中,全电力推进是今后舰船推进方式的发展趋势,而多相电机驱动系统的变频调速技术是其中的关键技术之一。
对多相变频调速技术的研究必将大大促进我国舰船推进技术的发展。
此外,多相电机变频调速技术也特别适合于应用在电动汽车、航空航天、军事、核反应堆供水等应用场合。
2 多相变频调速系统的优点实际上,多相技术与多电平技术可以看作是一个问题的两个方面。
要输出同样的功率,或者提高电压、降低电流,或者降低电压、提高电流。
多相变频调速系统的核心竞争力主要表现以下几个方面[3]:(1)在船舶电力推进,轨道交通等供电电压等级受限制的场合,采用多相电机驱动系统是实现低压大功率传动的有效途径。
在多相系统中,因为降低电压而增大的电流被分配到增加的相绕组中,此时,驱动系统中的中大功率逆变器可以采用目前电流等级的功率器件就能实现,同时也避免了选用小电流功率器件并联引起的均流问题。
多逆变器并联系统输出电压不平衡度补偿策略

A Strategy of Voltage Unbalance Degree Compensation Strategy of Multi-inverter Parallel System
ZHANG Ye, CAI Ying-kai, CAO Shi-long, LIU Xin
(State Grid Liaoning Electric Power Co., Ltd. y Shenyang 110000, China) A b stract:In order to solve the problem of unbalanced output voltage of multi-inverter parallel system, a novel output stage voltage quality compensation strategy based on master-slave control is proposed.Firstly, based on the analysis of the mechanism of voltage unbalance in the output stage of multi-inverter parallel system caused by unbalanced load, the positive and negative sequence components in the load current are extracted by the method of fundamental rota tion coordinate transformation, the remaining available capacity of the slave inverter is used to compensate the nega tive sequence component of the load current, while the main inverter only provides the fundamental component of the load current and maintains the stability of the output voltage of the inverter.The proposed control strategy embeds the power quality control function into the control strategy of the slave inverter, effectively reducing the imbalance of the output voltage.Finally, a parallel inverter simulation model is built in PSCAD environment to verify the effectiveness of the proposed control strategy.
ACS800
ACS800多传动在可逆轧机电动压下系统中的应用作者:吴洁旻汤元东来源:《电子世界》2012年第01期【摘要】本文结合梅钢热轧可逆轧机电动压下系统的特点,介绍了ACS800多传动系统结构、ACS800变频器直接转矩控制(DTC)原理、ACS800变频器参数配置,以及利用Drive Window软件对实际信号进行监控和调试的方法。
实践证明,ACS800多传动系统功能强大、控制精度高、响应速度快,具备良好的性能,维护调试方便,是理想的传动控制系统。
【关键词】ACS800;多传动;整流器;逆变器;可逆轧机;电动压下;DTC引言可逆轧机的出现改变了传统的热连轧模式。
梅钢热轧可逆轧机R2电动压下选用ABB公司ACS800多传动(Multi Drive)变频装置,ACS800变频器是目前流行的脉宽调制电压变频器,控制方式采用当今最先进的直接转矩控制(DTC)技术,能够精确控制任何标准鼠笼电机的速度和转矩。
直接转矩控制(DTC)是三相交流异步电动机调速技术中一项具有创新理念、控制独特、手段简明的高效调速技术,是目前高动态性能控制的最佳方法之一。
1.控制工艺要求可逆轧机R2为四辊水平轧机,为实现大行程、快速、频繁的辊缝调整,在压下机构中配有电动快速压下和液压压下,传动侧和操作侧的压下丝杆各由一台300kW的交流变频电机驱动,传动侧电机和操作侧电机没有刚性连接,采用电气同步控制技术。
轧钢时可逆轧机R2对每块钢坯进行多道次轧制(五或七道次)。
每个道次轧制结束后,上位机下发下一道次的轧机辊缝设定值到基础自动化UC(多功能控制器),基础自动化UC (多功能控制器)计算出压下电机速度给定值,发送给电动压下传动系统,电动压下逆变器输出相应电压驱动压下电机带动压下丝杆旋转,从而完成辊缝调节。
由于轧制节奏快,该控制过程要求传动系统具有快速的转矩响应、转速响应和良好的跟随性能。
2.设备选型2.1 晶闸管整流单元(TSU):ACN654/664-2120-5SN=2120kVA,UN=400 V,ICONMAX=2449A(AC),ICONMAX=3000A(DC),IMAX=4860A(DC)。
基于电流跟踪的并联逆变器控制系统的性能分析
控崩与应用技术 E1 乙 00 7( ) ,
基 于 电流 跟 踪 的 并 联 逆 变 器 控 制 系统 的性 能 分 析 米
魏永 清 , 张晓锋 , 乔 鸣忠 ( 海军 工程 大学 电气工程 系,湖北 武汉
摘
403 3 0 3)
要: 多逆变器并联运行是提高电机传动系统逆变器容量 的一种有效方 法。以多逆变器并 联带三相
W Iy 一ig Z A GX a n , Q A n - og E 0 qn , H N io g I O Mi z n g h
( eate t f l tcl nier g N vl nvr t o n ier g Wu a 30 3 C ia D p r n o Ee r a E g e n , a a U ie i f g e n , hn4 0 3 , hn ) m ci n i sy E n i
s hss o a h tu tr f h o to s se wa i l a d p r mee so o t l r a esmp i e u h w t t e s cu e o ec n r l y tm s s h t r t mpe, n a a t r f nr l sc n b i l id,h we - c oe f o v
关 键 词 : 联 逆 变 器 ;电机 传 动 ;主从 控 制 ; 递 函数 并 传 中图 分 类 号 : M 0 . 文 献标 识 码 : 文章 编 号 :6 36 4 (00 0 -0 60 T 3 12 A 17 -50 2 1 ) 10 1 - 4
柴发机组与逆变器并联运行暂稳态功率均分控制方法
柴发机组与逆变器并联运行暂稳态功率均分控制方法摘要:随着可再生能源发电技术、储能技术、微网技术等的不断发展,风光柴储多能源发电微网系统在偏远地区或孤立海岛地区应用越来越广泛。
除了传统大电网中的同步电机型电源,逆变型分布式电源也是多能源微网的重要组成部分。
其中传统的柴发机组具备独立供电、机动性强等特点,可保证系统的供电可靠性和运行稳定性。
而风电、光伏等可再生能源通过逆变器接入微网与柴发机组并联,能够利用地区资源实现多能互补、节能减排与经济运行,提高能源利用率。
但由于异构电源间固有的控制和物理结构以及馈线阻抗等差异,使得异构电源动态特性差异大,并联供电系统安全稳定运行面临挑战。
关键词:柴发机组与逆变器;并联运行;率均分控制引言随着中国的安全带和道路政策的出台,越来越多的中国企业走出国门,矿产企业不仅是其中的重要组成部分,而且面临着更多的困难,其中最困难的是电力供应。
由于大多数采矿企业位于电网难以复盖或经济欠发达的无电地区,电力负荷很大,因此它们使用与若干柴油发电机组(以下简称柴油发电机组)毗邻运行的孤立电网。
尽管隔离电网驱动的薪材生产单元解决了供电问题,但其发电成本高、运行工作量高、环境污染等问题一直困扰着企业。
如何提高薪材生产单位的发电效率,减轻运输工作量,降低发电成本已成为一个紧迫问题。
1系统结构柴发机组和逆变器典型并联供电系统结构如图1所示,同步发电机输出和逆变器经LC滤波后输出通过线路阻抗向母线上负载供电。
该系统常用的控制策略为柴发机组维持母线电压频率的恒定,逆变器以电流源模式运行注入功率。
图1柴发机组与逆变器并联供电系统同步发电机具体控制框图如图2所示,其中调速系统主要由转速调节器、油门执行器和柴油发动机组成,其中:Psg为发电机有功功率;kp_sg为发电机有功下垂系数;Tm为机械转矩;wref和wsg分别为参考转速和发电机实际转速。
转速调节器通过转差信号调节油门开度指令,油门执行器在给定油量信号下驱动控制油门动作,而实际油门开度有一定范围,且执行器动作发生到油门开度变化需要经过一段时延,因此引入限幅和时延环节模拟实际动态过程。
双源制机车电气系统设计简析
双源制机车电气系统设计简析摘要:随着电力机车牵引动力由“柴油为主、电力为辅”向“电力为主、柴油为辅”的方向发展,为满足牵引动力的多样化需求,在国内一些大型铁路枢纽和物流中心,已经逐步采用双源制机车。
双源制机车电气系统采用“主变流器+辅助变流器”的冗余配置,以确保机车在不同牵引动力组合情况下,均能提供可靠、稳定的牵引动力。
同时,双源制机车电气系统采用“分布式控制”和“集中式控制”相结合的方式,既保证了机车控制系统的高可靠性和安全性,又能够根据不同牵引动力组合情况进行灵活调整。
本文就双源制机车电气系统设计方案及设计要点进行简要分析。
关键词:双源制机车;电气系统;设计简析双源制机车是一种新型的电力机车,它采用了两个独立的电机系统,可以同时驱动两个车轮,实现了高效、节能和环保的效果。
电气系统是双源制机车的核心组成部分,其设计质量直接影响到整个机车的性能和可靠性。
双源制机车电气系统设计的主要原则是充分考虑机车的不同负载需求,合理分配两个电机系统的功率和转速,实现高效、节能和环保的效果。
同时,电气系统设计还需要考虑到不同环境条件下的可靠性和稳定性,确保在各种情况下都能正常工作。
1.设计背景双源制机车的电气系统采用“主变流器+辅助变流器”的冗余配置,其中,“主变流器”主要完成对牵引电动机的控制,同时对机车的速度和加速度等运行状态进行监视和控制,辅助变流器则完成对机车的制动、空气制动等状态的监视和控制。
在双源制机车中,辅助变流器也可以实现对机车速度的监控和控制,但其功能与“主变流器”相似。
此外,双源制机车还有一部分功能由“辅助变流器”来完成。
在我国铁路枢纽及物流中心中,为了提高运输能力,通常采用双源制机车。
例如,在北京南站枢纽和北京南站物流中心中,均采用了双源制动力系统。
其中,北京南站为“电力-柴油”双源制机车;北京南站为“电力-电力”双源制机车。
双源制机车的牵引动力是通过主变流器提供的,在辅助变流器上也有相应的控制系统来实现对机车的控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
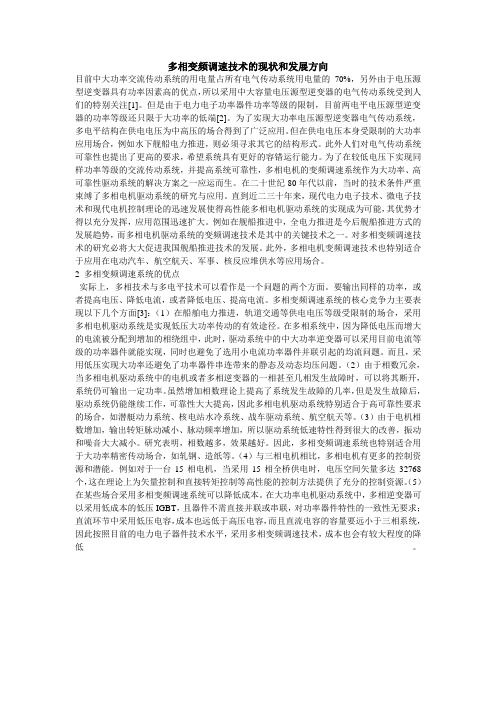
假设并联各逆变器的均流电抗器值均为 Z1 , 负 载阻抗为 Z L , 电机电流等于并联逆变器各相电流之 和, 根据电路叠加定理, 当 N 个逆变器并联时, 电机 b, c} 。 电流的电路模型如图 2 所示, 其中 ∈{ a,
Z1 U1准+…+UN准 im NZL
2
2. 1
控制系统模型
控制系统结构
在大功率 电 机 传 动 系 统 中 , 扩大逆变器容量 [ 1] 的技术途 径 主 要 有 多 相 化 技 术 、 多电平技术和 多逆变器并 联 运 行 技 术 , 其中多逆变器并联技术 立足于成熟 的 三 相 电 机 传 动 系 统 的 控 制 技 术 , 易 于实现扩容 ; 因此在兆瓦级电机传动领域 , 尤其是 在 690 V 低压大电流传动系统中 , 以小功率等级的
(3)
均流 电抗器 逆变器 N
式中: K c 为均流调节器增益; i1c 为逆变器 1 中实际 环流的大小。 上述通过建立电机电流和逆变器环流的等效电 路模型, 得到电机电流和环流的控制方程 , 为逆变器 并联技术用于传动系统中的电流控制打下基础 。
图1 Fig. 1
带三相感应电机的逆变器并联系统的结构图 Structure of parallel inverters with 3phase induction motor
* di
兹e iq*i iai ibi ici idi 3 iqi 2 ioi 兹e iaj ibj icj 兹e id%j ia ib ic 棕r iaj ibj icj 3 iq%%j 2 io%j 兹e
渍r
O- 控制
SPWM
D- 控制
Vai Vdi 2 Vbi Q- 控制 V Voi 3 ci
)
有并联逆变器间的环流。根据并联逆变器运行时电 机电流的回路模型和控制原理, 建立逆变器并联传 动系统的电机电流传递函数示意图 , 如图 5 所示。
* im
将式( 4 ) 中各项电压相加, 得
N
SPWM
D- 控制
Va%j Vq%j 2 Vb%j Q- 控制 V Vo%j 3 c%j
Vd%j
encoder
( Department of Electrical Engineering,Naval University of Engineering,Wuhan 430033 ,China)
Abstract: In order to solve the problem of current balancing control of parallel inverters for lowvoltage largecurrent motor drive system,the masterslave vector control system of tracking the reference current is studied. Based on the circuit models and the control principles of motor current and circulating current,the masterslave control system of tracking the reference current was developed,and the current regulator was designed from the motor stability. The performances of the control system were verified by simulations and experiments. The results show that the motor current can be shared and has good dynamic characteristics. Key words: parallel inverters; motor drive; masterslave control; current sharing
提出了跟踪参考电流方式的主从式矢量控制策略 , 并从电机稳定 析了电机电流和环流的控制原理 , 性能角度研究了电流调节器的设计原则 , 最后对控制系统性能进行了仿真和实验分析。 研究结果 表明:该控制策略间接引入了均流环控制 , 能有效减小并联逆变器之间的环流; 通过对电流调节器 参数的合理设计, 使得电机具有较好的稳定性能和动态性能 。 关键词: 并联逆变器; 电机传动; 主从控制; 均流控制
第 14 卷
第2 期
2010 年 2 月
电 机 与 控 制 学 报 ELECTRI C MACHINES AND CONTROL
Vol. 14 No. 2 Feb. 2010
用于电机传动系统的多逆变器并联控制技术
魏永清, 张晓锋, 乔鸣忠
( 海军工程大学 电气工程系,湖北 武汉 430033 )
摘
要: 为了解决用于低压大电流电机传动系统的逆变器并联控制问题 , 对跟踪参考电流方式的 主从式矢量控制系统进行了研究 。在建立电机电流和并联逆变器环流等效电路模型的基础上, 分
Ui ∑ i =1
= Ki ( i
* m
- im ) 。
(5)
+ -
( )/子is K i 子is+1
KPWM
1/ ( Z1+NZL)
im
其中 i m 是各逆变器电流之和, 即实际的电机电流。 根据图 2 中电机电流的控制原理, 对比式 ( 1 ) 和式 ( 5 ) 可以看出, 并联系统中各逆变器的电流调节器 增益 K i 等于电机电流调节器增益 K m , 即各逆变器 的电流调节完成对电机电流的控制功能 。 将式( 4 ) 中任意逆变器的输出电压与并联逆变 器的平均输出电压相减, 得
工作原理
在基于跟踪参考电流的主从式控制系统中, 主 * 模块计算出的给定电流信号 i m 经 N 等分后, 作为从 模块的给定电流信号。定义各逆变器电流调节器的 增益均为 K i , 则调节器输出的电压和电流关系为 i - i1 , N * i UN = Ki m - iN 。 N U1 = K i
将跟踪参考电流的主从式控制结构应用到电机 可得基于跟踪参考电流的主从式矢 的矢量控制中, 量控制系统, 其能够在旋转坐标系下实现对电机转 [ 6 - 7] 、 。 参考电 速 电流和模块之间环流的有效控制 流经 Park 坐标变换后转换成直流量, 能很好地提高 调节器的控制性能, 做到无静差控制。 控制系统结 构如图 4 所示。 图 4 中, 主控制模块完成矢量控制中的转速调 节和磁链控制, 得到电机给定的转矩电流和励磁电 流;除以模块数 N 后, 得到各个逆变模块的给定电 流, 并将给定电流和磁链角发送给从模块 。 从控制模 块 从 主 控 制 模 块 获 得 转 矩 分 量 、 励 磁分量的参 考 电 流 和 磁 链 角 , 逆变器输出的三相 电流根据主模块发送的磁链角经旋转变换后得到 dq0 坐标系下的电流 , 与主模块发送的参考电流相 比较并进行 PI 控制 , 得到电机旋转坐标下的给定 电压值 , 并 转 换 为 三 相 静 止 坐 标 系 上 的 相 电 压。 采用 SPWM 调 制 方 式 , 产生触发脉冲控制逆变器 。 的输出电压
。
(2)
以逆变器 1 为例, 其环流电路模型如图 3 所示。
Z1 i1c
1
电机电流和逆变器环流的等效电路 及控制原理
U1准- U1准+…+UN准 N
本文研究对象为多个三相桥式变流器并联带三 如图 1 所示。 相电机负载的推进系统,
逆变器 1 均流 电抗器
图3 Fig. 3
逆变器环流电路模型 Circuit of cross current
图2 Fig. 2
电机电流的电路模型 Circuit of motor current
由图 2 看出 , 并联逆变器电压共同作用在电机 控制并联逆变器的输出电 负载上产生 负 载 电 流 , 压, 即可控 制 电 机 电 流 ; 因 此 , 可得电机电流的控 制方程
* * U1 + … + U* N = Km ( im - im ) , * m
N
Kf ( / Ts+1)
图5 Fig. 5
电机电流的传递函数示意图
Sketch of transfer function of motor current
图 5 中, 当逆变器的开关频率足够高时, 忽略开 关频率附近及以上各次谐波, 逆变器可视为一比例环 节 K PWM , 只对调制波进行放大; i m 为实际的电机定子 电流, 电流调节器选用 PI 型, 其参数为 K i ( τ i s + 1 ) / τ i s; K f / ( Ts + 1) 为电流环的反馈环节模型; Z1 = R1 + L1 s 为均流电抗器 1 的阻抗,Z L = R L + L L s 为电机等 效阻抗。因此, 电机电流的开环传递函数 G m 为 K( τ i s + 1 ) G m ( s) = , (7) ( L1 + NL L ) s s ( Ts + 1 ) ( R1 + NR L ) + 1
(1)
式中: K m 为电机电流调节器增益; i 是给定电机电 流; i m 是实际电机电流。 当 N 个逆变器并联运行时, 将各逆变器的环流 定义为各逆变器的输出电流与并联逆变器输出平均 电流之差, 即
38
电
机
与
控
制
学
报
第 14 卷
主控制模块 渍* r 励磁 电流 计算 i* d 从控制模块 i 棕* + 棕r PI T* e 转矩 电流 计算 1/N i* q
Vqi
iai ibi ici
M ~
电机 模型