AGV拖车电机选择计算表
驱动轮直流电机选择计算
驱动轮电机用于驱动AGV 的运转,包含 AGV 的直行及差速转弯。
在选择电机时,我们往常需要计算出电机的额定功率、额定转矩、额定转速等[28] 。
而在驱动电机的参数计算以前第一需要明确AGV 的各项设计要求,如表3-1 所示。
表 3-1 AGV 设计要求设计要求设计参数整车制定重量 m 100kg最大负载 M max 200kg最高行驶速度v m ax 1m / s最大加快度 a m ax 0.5m / s23.1.1电动机的选择1.驱动力与转矩关系AGV 在地面行驶时,轮子与地面接触, AGV 战胜摩擦力向前行驶,电机输出转矩 Tq 为小车供给驱动力。
而 Tq 经减速机减速后获得输出转矩Tt输出至驱动轮,输出转矩 Tt 为:Tt i g Tq式中i g——减速机减速比;Tq ——电机输出转矩;Tt ——输出转矩;——电机轴经减速机到驱动轮的效率。
驱动轮在电机驱动下在地面转动,此时有关于地将形成一个圆周力,而地面对驱动轮也将产生一个等值、反向的力F t,该力即为驱动轮的驱动力[29]。
驱动力为:F t Tt igTqRq Rq式中Rq ——驱动轮的驱动半径。
因为驱动轮一般刚性较好,视其自由半径、静力半径、转动半径三者同样,均为 Rq 。
2.驱动力与阻力计算小车内行驶过程中要战胜各样阻挡力,这些力包含:转动阻力F f、空气阻力F w、坡度阻力 F r、加快度阻力 F j。
这些阻力均由驱动力F t来战胜,所以:F t F f F w F r F j(1)转动阻力 F f转动阻力在AGV 行驶过程中,主要由车轮轴承阻力以及车轮与道路的转动摩擦阻力所构成,F f大小为:Ff FfzFfg式中F fz——车轮与轴承间阻力;F fg——车轮与道路的转动摩擦阻力。
此中,车轮轴承阻力 F fz为:d / 2 d 0.015 48F fz P P1000 3.6ND / 2 D 200式中P ——车轮与地面间的压力, AGV设计中,小车自重 m 为 100kg,最大载重量 M m ax为200kg,所以最大整车重量为300kg,一般状况下, AGV前行过程中,有三轮同时着地,知足三点决定一平面的规则,各轮的压力为P=1000N[30];d ——车轮轴直径,驱动轮在本次设计中选择 8 寸的工业车轮,即d=48mm;D——车轮直径,查文件 [40] 可知,驱动轮在本次设计中选择 8 寸的工业车轮,即 D=200mm;μ——车轮轴承摩擦因数,优秀的沥青或混凝土路面摩擦阻力系数为—,μ=。
电机车选择计算

按列车制动距离计算车组重量Q/kg
αzd—制动时的减速度,m·s-2,
Vzd—列车开始制动时的速度,m·s-1
Lzd—列车制动,m。《规程》规定,运物时Lzd≤40m,运人时Lzd≤20m
续表
计算步骤
最小值,kg
G0—矿车自重,t
Gz—矿车载重,t
一台电机车每班可能往返次数n /次
t1—电机车每班工作时间,h
每班运送的货物需要电机车运行的次数nb/次
K—运输不平衡系数,一般取K=1.25
Ap—每班的运送货载量,t
G—矿车载重,t
每班电机车运行的总次数n0/次
nr—每班运送人员电机车运行的总次数,次
工作电机车的台数N/辆
F0—电机车长时牵引力,N
α—调车系数:
运输距离L/km
<1
1~2
>2
α
1.4
1.25
1.15
τ—相对连续运行时间,min:
t1—电机车往返一个行程净运行时间,t1=2000L/60Vp,Vp=0.75Vc
L—总运输距离,km
Vp—电机车平均运行速度,m·s-1
Vc—电机车长时运行速度,m·s-1
θ—电机往返一个行程停车及高度时间,min
电机车选择计算
计算步骤
公式、符号、参数
按电机车的牵引力计算车组的重量Q/kg
P—电机车的重量,
Pn—电机车的粘着重量,一般P=Pn
ψ—粘着系数:列车启动(撒砂)ψ=0.24
列车运行(不撒砂)ψ=0.12
列车运行、制动(撒砂)ψ=0.17
ω—列车运行阻力系数,N·t-1:空列车:ωk,空列车:ωz
矿车容积
驱动轮直流电机选择计算

驱动轮电机用于驱动 AGV 的运行,包括AGV 的直行及差速转弯。
在选择电机时,我们通常需要计算出电机的额定功率、额定转矩、额定转速等[28]。
而在驱动电机的参数计算之前首先需要明确 AGV 的各项设计要求,如表3-1 所示。
表 3-1 AGV 设计要求3.1.1 电动机的选择1. 驱动力与转矩关系AGV 在地面行驶时,轮子与地面接触,AGV 克服摩擦力向前行驶,电机输出转矩Tq 为小车提供驱动力。
而Tq 经减速机减速后得到输出转矩Tt 输出至驱动轮,输出转矩Tt 为:q t g T i T η=式中 g i ——减速机减速比;q T ——电机输出转矩;t T ——输出转矩;η——电机轴经减速机到驱动轮的效率。
驱动轮在电机驱动下在地面转动,此时相对于地将形成一个圆周力,而地面对驱动轮也将产生一个等值、反向的力t F ,该力即为驱动轮的驱动力[29] 。
驱动力为:qqq t g t R T i R T F η== 式中q R ——驱动轮的驱动半径。
由于驱动轮一般刚性较好,视其自由半径、静力半径、滚动半径三者相同,均为q R 。
2. 驱动力与阻力计算小车在行驶过程中要克服各种阻碍力,这些力包括:滚动阻力f F 、空气阻力w F 、坡度阻力r F 、加速度阻力j F 。
这些阻力均由驱动力t F 来克服,因此:j r w f t F F F F F +++=(1) 滚动阻力f F滚动阻力在 AGV 行驶过程中,主要由车轮轴承阻力以及车轮与道路的滚动摩擦阻力所组成,f F 大小为:fg fz f F F F +=式中fz F ——车轮与轴承间阻力;fg F ——车轮与道路的滚动摩擦阻力。
其中,车轮轴承阻力fz F 为:N 6.320048015.010002/2/fz =⨯⨯===DdPD d PF μμ式中P ——车轮与地面间的压力,AGV 设计中,小车自重m 为100kg ,最大载重量m ax M 为200kg ,因此最大整车重量为300kg ,一般情况下,AGV 前行过程中,有三轮同时着地,满足三点决定一平面的规则,各轮的压力为P =1000N [30];d ——车轮轴直径,驱动轮在本次设计中选择8寸的工业车轮,即d=48mm ;D ——车轮直径,查文献[40]可知,驱动轮在本次设计中选择8 寸的工业车轮,即D =200mm ;μ——车轮轴承摩擦因数,良好的沥青或混凝土路面摩擦阻力系数为—,μ =。
AGV设计计算
电机传到驱动轮的力 FD=M/D*2 加速度 最大承压 最小承压 轮压 许用轮压 车轮接触长度(轮宽) 橡胶轮许用接触应力 驱动轮半径 R≥Rc/B/Cp a核=(FD-Ff)/m Rmax=1.2*m1*g/num Rmin=1.2*m1*g/num Rc=(2Rmax+Rmin)/3 Fc=R*B*Cp≥Rc
imax=n电/n轮 imin=Σ F运/MD i主=i减*i链
N N N N N 前轮驱动
i减 i链 n电 n轮 MD M电
i链=Z从/Z主
n轮=Vmax/(π *d) MD=M电*n
mm mm
Z主 Z从
干混泥土
kg V核 M核 FD a核 Rmax Rmin Rc Fc B Cp R核
速度、力矩、加速度、轮径校核 AGV最大运行速度 驱动轮驱动力矩 V核=n电/i主/60*π *d M核=MD*i主
0.75
m1
AGV自重
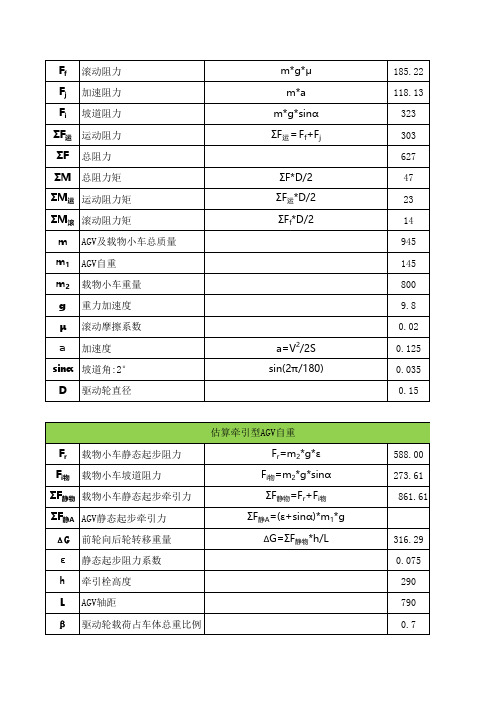
m1=(Σ F静物+μ D*Δ G)/(μ D*β -ε -sinα )/g 270.12
N N N N N N.m N.m N.m kg kg kg m/s2 橡胶轮与混泥土地面 m/s2 从静止经过1m距离达到速度 Pf Pj Pi P总 P单 P n V Vmax η ka 滚动阻力功率 加速阻力功率 坡道阻力功率 电机总阻力功率 电机阻力功率 电机功率 电机数量 工作速度 最大速度 机构传动效率 电机安全系数
Σ M运 运动阻力矩 Σ M滚 滚动阻力矩 m m1 m2 g μ a AGV及载物小车总质量 AGV自重 载物小车重量 重力加速度 滚动摩擦系数 加速度
a=V2/2S sin(2π /180)
0.125 0.035 0.15
sinα 坡道角:2° D 驱动轮直径
AGV设计电机选择计算
驱动系统部件的选择与校核AGV的驱动系统主要由驱动电源、电机和减速装置组成。
电机的性能参数及减速装置的规格型号的确定直接决定整车的动力性,即车辆的运动速度和驱动力直接决定整车的动力特性。
因此电机必须通过详细计算进行选择,现在很多电机直接与减速装置组合在一起构成减速电机,为我们的设计带来了很大的方便,并且能使AGV的驱动系统简单化,结构小型化,此外性价比也比较高,因此此次设计直接选择减速电机作为驱动源。
1电机种类的选择与AGV相关参数自动引导车是电动车的一种,而电机是电动车的驱动源,提供给整车提供动力。
目前最常用的电动车辆驱动系统有以下三种:第一种是直流电机驱动系统,20世纪90年代前的电动汽车几乎全是直流电机驱动的。
直流电机木身效率低,体积和质量大,换向器和电刷限制了它转速的提高,一般其最高转速为6000-8000r/min。
但出于其缺点目前除了小型车外,电动车很少采用直流电机驱动系统。
第二种是感应电机交流驱动系统。
该系统是20世纪90年代发展起来的新技术,目前尚处于发展完善阶段。
电机一般采用转子鼠笼结构的三相交流感应电动机。
电机控制器采用矢量控制的变频调速方式。
其具有效率高、体积小、质量小、结构简单,免维护、易于冷却和寿命长等优点,该系统调速范围宽,而且能实现低速恒转矩,高速恒功率运转,但交流电机控制器成本较高。
目前,世界上众多著名的电动汽车中,多数采用感应电机交流驱动系统。
第三种是永磁同步电机交流驱动系统,其中永磁同步电机包括无刷直流电机和三相永磁同步电机,而永磁同步电机和无刷直流电机相比,永磁同步电机交流驱动系统的效率较高,体积最小,质量最小,也无直流电机的换向器和电刷等缺点。
但该类驱动系统永磁材料成本较高,只在小功率的电动汽车中得到一定的应用。
但永磁同步电机是最有希望的高性能电机,是电动汽车电机的发展方向。
出于直流电机本身具有控制系统简单,调速方便,不需逆变装置等优点,并且本次毕业设计的AGV运行速度低,功率也不高,因此,采用直流电机(包含减速装置)作为驱动系统的动力源足够满足此次AGV设计,并且性价比优越。
AGV驱动电机选型计算公式

单位AGV运行参数圆周率π重力加速度g m/s^2支撑轮滚动阻力系数f AGV运行坡度角α度AGV车自重G1kg AGV车载重GkgAGV动力轮数量(即驱动电机数量)N 驱动轮直径D mm 驱动轮静摩擦系数μ运行速度V m/s 加速时间t s 电机输出轴转速n 总效率η减速机服务系数(电机安全系数)k 传动比i运行参数计算AGV车总质量mkg 驱动轮转速n=1000V/(π*D)*60rpm 总传动比i 加速度a=V/t m/s^2加速距离s=V*V/2a m agv行驶阻力计算agv滚动阻力计算(静态力)Ff=mg*f N agv加速阻力计算(动态力)Fj=ma N agv坡度阻力计算Fi=mg*sin αN agv行驶阻力(等于AGV所需的牵引力)∑F=Ffji N agv行驶总阻力矩∑M=∑F*R Nm 扭矩与功率计算减速机输出轴转速njrpm 减速机负载扭矩(单台)Tj=∑M/N Mm 电机输出扭矩(单台)T=Tj/NMm 减速机所需配备电机功率(单台)Pj=Tj*nj/9550/η 或Pj=FV/1000/η/N kW 电机额定功率P0=Pj/ηkW 单驱动轮所需牵引力F牵=∑F/N N 驱动轮所需的正压力Fn=F牵/μ/g kg 电机输出轴转速n rpm 电机输出扭矩Nm 在D 列填入选型参数以下自动计算,勿修改,选中相应结果框可在顶上输入栏看到公式数据3.149.810.021.00150.002850.004.00200.000.402.0010.000.851.2515.003000.00190.9915.000.2010.00588.42600.00513.471701.89170.19190.9942.5510.641.001.18425.47108.462864.793.34。
驱动轮直流电机选择计算
表 3-1 AGV 设计要求3.1.1 电动机的选择1. 驱动力与转矩关系AGV 在地面行驶时,轮子与地面接触,AGV 克服摩擦力向前行驶,电机输出转矩Tq 为小车提供驱动力。
而Tq 经减速机减速后得到输出转矩Tt 输出至驱动轮,输出转矩Tt 为:q t g T i T η=式中 g i ——减速机减速比;q T ——电机输出转矩;t T ——输出转矩;η——电机轴经减速机到驱动轮的效率。
驱动轮在电机驱动下在地面转动,此时相对于地将形成一个圆周力,而地面对驱动轮也将产生一个等值、反向的力t F ,该力即为驱动轮的驱动力[29] 。
驱动力为:qqq t g t R T i R T F η==式中q R ——驱动轮的驱动半径。
由于驱动轮一般刚性较好,视其自由半径、静力半径、滚动半径三者相同,均为q R 。
2. 驱动力与阻力计算小车在行驶过程中要克服各种阻碍力,这些力包括:滚动阻力f F 、空气阻力w F 、坡度阻力r F 、加速度阻力j F 。
这些阻力均由驱动力t F 来克服,因此:j r w f t F F F F F +++=(1) 滚动阻力f F滚动阻力在 AGV 行驶过程中,主要由车轮轴承阻力以及车轮与道路的滚动摩擦阻力所组成,f F 大小为:fg fz f F F F +=式中fz F ——车轮与轴承间阻力;fg F ——车轮与道路的滚动摩擦阻力。
其中,车轮轴承阻力fz F 为:N 6.320048015.010002/2/fz =⨯⨯===DdPD d PF μμ式中P ——车轮与地面间的压力,AGV 设计中,小车自重m 为100kg ,最大载重量m ax M 为200kg ,因此最大整车重量为300kg ,一般情况下,AGV 前行过程中,有三轮同时着地,满足三点决定一平面的规则,各轮的压力为P =1000N [30];d ——车轮轴直径,驱动轮在本次设计中选择8寸的工业车轮,即d=48mm ;D ——车轮直径,查文献[40]可知,驱动轮在本次设计中选择8 寸的工业车轮,即D =200mm ;μ——车轮轴承摩擦因数,良好的沥青或混凝土路面摩擦阻力系数为—,μ =。
驱动电机的选型计算表

参数名称 设备总重 额定起重量 驱动电机总数 初选运行速度 摩擦阻力 斜坡阻力 每组驱动机构的初选功率 代号 G Q m V Wm Wp P m/min N N kw 单位 N N 计算结果 52430 49000 2 20 2028.6 101.43 0.501183529
摩擦阻力系数ω= 车轮直径/mm 车轴直径/mm 滑动轴承 滚动轴承 起重机的斜坡阻力系数α= 在钢筋混凝土基础和金属梁上的轨道 桥式、龙门起重机的小车轨道
0.02 200以下 200-400 50以下 0.028 0.02 0.001 0.001 0.002 50-65 0.018 0.015 400-600 65-90 0.016 0.01 600-800 90-100 0.013 0.006
初选减速箱速比
参数名称 车轮踏面直径 运行速度 电机转速 初选减速箱速比 代号 DL V n0 i 单位 mm m/min r/min 计算结果 165 20 1478 38.28759
大车实际运行速度m/min
参数名称 初选减速箱速比 电机n 单位 计算结果 37.8 1478 20.25798413
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
背驮式AGV小车牵引力及电机选型计算①AGV运行参数
圆周率π=
重力加速度g=
支撑轮滚动阻力系数f=
AGV运行坡度角α=
AGV车自重G1=
AGV车载重G2=
AGV动力轮数量(即驱动电机数量)N=
驱动轮直径D0=
驱动轮静摩擦系数μ=
运行速度V=
加速时间t=
电机输出轴转速n=
总效率η=
减速机服务系数(电机安全系数)k=
主动轮齿数(带轮或链轮)Z主=
从动轮齿数(带轮或链轮)Z从=③运行参数计算
AGV车总质量m=
驱动轮转速n驱=1000V/(π*D)
总传动比i总=n电/n驱
副传动比i副=n主/n从=Z从/Z主
加速度a=V/t
④agv行驶阻力计算
agv滚动阻力计算(静态力)F f=mg*f
agv加速阻力计算(动态力)F j=ma
agv坡度阻力计算F i=mg*sinα
agv行驶阻力(等于AGV所需的牵引力)∑F=F f+F j+F i
agv行驶总阻力矩∑M=∑F*R ⑤扭矩与功率计算
减速机输出轴转速n j=n驱*i副或n j=n驱*Z从/Z主
减速机负载扭矩(单台)T j=∑M/N
减速机所需配备电机功率(单台)P j=T j*n j/9550/η
或P j=FV/1000/η/N
电机额定功率P0=Pj/η
AGV单驱动轮所需牵引力F牵=∑F/N
驱动轮所需的正压力Fn=F牵/μ/g
电机的转矩可分为两部分计算:
1、经启动达到匀速旋转后,克服轴承摩擦阻力转矩T2,T2=F2 R2 (式中F2为摩擦阻力,R2受力点的旋转半径启动转矩T1 ,圆盘由静止到开始匀速旋转所克服的惯性转矩及摩擦力矩T2,T1=F1R1+T2,(式中F1为惯性力
计算
3.141593
9.807m/s2
0.02f=0.018~0.020
1度0.017453293弧度
325Kg
1100Kg
1
250mm
0.4(聚氨酯轮)
150m/min
1.25s
2250r/min
0.85
1.25
30减速电机直接带驱动轮,此项可省略
30减速电机直接带驱动轮,此项可省略
1425Kg
190.985932r/min
11.7809725电机输出转速与驱动轮转速之比在没有二级传动情况下,总传动比
1
2m/s2v的单位:m/s
279.4995N f:支撑轮滚动阻力系数
2850N
243.896944N
3373.39644N小车牵引力等于行驶阻力
421.674555NM R:驱动轮半径
190.985932
421.674555NM N:驱动电机数量;
9.92102345KW T:减速机所需扭矩,单位:NM,n:减速机输出转速,单位:n/min
9.92175425KW V:小车的运行速度,单位:m/s F:小车行驶总阻力 ,单位:N 功率
11.6717923KW
3373.39644N∑F:AGV行驶总阻力 N:驱动轮数量
859.94607Kg F
=μ*mg摩擦力等于正压力与静摩擦系数的乘积
牵
擦阻力,R2受力点的旋转半径), F2= f N (式中 f 为轴承滚动摩擦系数,可根据使用轴承的结构查表。
N为正压力,其值F1R1+T2,(式中F1为惯性力,R1为惯性半径),设圆盘由静止到开始匀速旋转的加速度为a,加速时间为 t ,终速为V,则
情况下,总传动比就等于减速机传动比
出转速,单位:n/min
阻力 ,单位:N 功率单位:KW η:机械传动效率
构查表。
N为正压力,其值为圆盘和电机轴重力之和)。
速时间为 t ,终速为V,则加速度 a = V / t ,F1=ma (式中m为圆盘及电机轴的质量)。
这样就可求出T1。