Recurdyn 学习笔记
RecurDyn常见QA整理

RecurDyn常见问题及解答目录安装和帮助 (2)概念理解 (3)Recurdyn导入和导出 (4)基本操作 (6)技术问题 (8)约束和接触 (8)柔性体 (8)履带 (9)链 (9)带 (10)分析计算 (10)其他 (11)安装和帮助:Q:RecurdynV7R2正式版和试用版的安装讲解?A:参考我们的安装文件。
Q:我可以获得哪方面的技术支持?A:使用版和正式版得到的技术支持不同。
根据购买技术服务与否,分别可以获得简单问题咨询、复杂问题咨询、模型调试、客户化定制等不同等级的技术支持。
Q:帮助文档有中文版的吗?A:目前只有英文的帮助文档,中文帮助文档正在进行中,将来会有。
Q:练习模型在哪个文件夹?A:C:\Program Files\FunctionBay, Inc\RecurDyn V7R2\Help\Manual\Tutorials\Basic TutorialQ:Tut1_Crank Slider 3D文件夹怎么没有任何模型?A:模型都是自己按照Tut1_Crank Slider建立的,文件夹里没有CAD模型。
概念理解:Q:SYSFNC的第2,3个参数是什么意思?A:第2个参数指坐标信息,第3个参数指坐标数量。
比如DX,DX有I,J坐标系也可以是I,J,K坐标系。
Q:rotational spring force中spring coefficient 和damping coefficient两个参数各自对扭矩的影响是什么?A:前者是弹簧刚度,乘上变形角度得到扭矩;后者是阻尼,乘上旋转速度得到扭矩。
Q:ExtendedSurfaceToSurface参数在实际运用中的对分析结果的影响A:法向力可表示为-k*(abs(delt))^m1-c*((abs(delt))^m3)*(dot(delt))^m2其中m1对应刚度指数;m2对应阻尼指数;m3对应渗透指数。
各量取值的多少,要看你定义的是线性或非线性。
recurdyn笔记

1.创建轮胎力注意点:(1)生成轮胎力时,重力方向必须要在Z轴方向(2)必须在XZ平面建立轮胎模型(3)轮胎力的Z轴是轮胎的旋转轴(4)轮胎模型和轮胎力的方向必须一致(5)轮胎中心点方向必须与轮胎力的运动marker点方向一致步骤:(1)将重力方向设为Z轴,将工作平面改为XZ平面(2)创建轮胎几何模型(3)将工作平面改为XY平面(为了创建轮胎力)(4)单击FORCE下的轮胎力图标(5)单击2点,轮胎力Z轴方向由这2点决定(6)打开轮胎力属性对话框,将connector选项卡中的欧拉角复制到剪贴板(7)打开轮胎几何模型属性对话框(8)将材料输入方式由library改为user input(9)单击CM,在弹出的对话框中选择origin&orientation选项卡,在欧拉角一栏中粘贴,将轮胎几何模型的质心marker点方向修改为轮胎力的action marker 的欧拉角方向一致。
可以通过设置轮胎属性参数来建立不同轮胎模型。
2.路面轮胎需要和路面接合起来进行仿真,提供了4中创建路面的方式:Outline road :轮廓线路面Spline road :样条曲线路面Face road :面路面Import road :导入路面文件步骤:(1)单击body下的ground按钮,进入ground编辑界面(2)通过curve and surface 创建2条样条曲线或2条轮廓线(3)单击spline road 或是outline road(4)选择样条曲线,右击在快捷菜单中选择fininsh operation 确认生成路面。
面路面,事先创建一个面,其他步骤和线路线相同。
recurdyn基本算法

recurdyn基本算法
RecurDyn是一种基于多体动力学的仿真软件,广泛应用于机械工程、航空航天、汽车工程、船舶工程等领域。
本文主要介绍RecurDyn 的基本算法。
1. 多体动力学模型
RecurDyn的核心是多体动力学模型,包括质量、速度、位置、加速度等物理量。
模型的基本假设是物体之间存在相互作用力,根据牛顿定律,物体的加速度与作用力成正比,与物体的质量成反比。
2. 时空离散化
为了对物体的运动进行仿真,需要将时间和空间离散化,即将连续的时间和空间转化为离散的时间和空间。
在RecurDyn中,时间和空间离散化采用了显式欧拉法或隐式欧拉法。
3. 接触检测
接触是多体动力学模型中重要的问题,需要检测物体之间是否接触,并计算接触力。
RecurDyn采用了快速多极子方法或广义平面算法进行接触检测。
4. 接触力计算
在接触检测之后,需要计算接触力。
RecurDyn采用了Hertz接触理论或Coulomb接触模型进行接触力计算。
5. 约束条件
在多体动力学模型中,物体之间存在约束条件,如接触约束、几何约束、运动约束等。
RecurDyn采用了拉格朗日乘子法或笛卡尔-拉
格朗日方法进行约束条件的处理。
以上是RecurDyn的基本算法,通过对这些算法的深入了解和应用,可以更好地进行物体的运动仿真和分析。
RecurDyn轴承仿真解决方案——新一代虚拟样机系统软件RecurDyn在轴承仿真中的应用
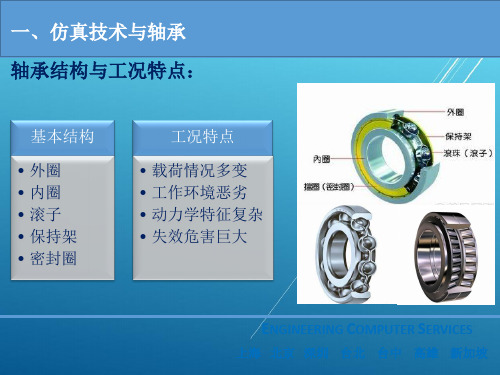
基本结构
• 外圈 • 内圈 • 滚子 • 保持架 • 密封圈
工况特点
• 载荷情况多变 • 工作环境恶劣 • 动力学特征复杂 • 失效危害巨大
ENGINEERING COMPUTER SERVICES
上海 北京 深圳 台北 台中 高雄 新加坡
一、仿真技术与轴承 常见的轴承故障模式举例分析:
上海 北京 深圳 台北 台中 高雄 新加坡
二、RecurDyn与轴承仿真 RecurDyn的轴承仿真方案:
• 所有动力学问题 • 部分有限元问题 • 疲劳问题
MFBD
(FEA)
• 特定时间点静力 学分析
• 特定时间段瞬态 动力学
RecurDyn可同时求解非线性有 限元和多体动力学矩阵,引领 动力学仿真进入了新的时代!
❖ 结合世界各地一流专家共同研发新一代多刚 柔体动力学的计算核心; 目前共有全球7所大学共10个研究实验室共 同参与研究。
❖ 全球市场布局遍及五大洲,目前的在美国、 德国、日本、中国、韩国印度等设有研发中 心。
❖ R Recursive 递归算法 ❖ D Dynamics 动力学
世界第一使用全节点有限元法的 MFBD(多柔性体动力学)分析软件
ENGINEERING COMPUTER SERVICES
上海 北京 深圳 台北 台中 高雄 新加坡
三、RecurDyn轴承仿真方案实例 RecurDyn的轴承行业客户:
ENGINEERING COMPUTER SERVICES
上海 北京 深圳 台北 台中 高雄 新加坡
三、RecurDyn轴承仿真方案实例 RecurDyn在INA:
专业轴承模块帮助您快速建立系统级虚拟样机中 的轴承仿真模型 堪称CAE软件界最友好的用户界面让学习和使用不再 困难
RecurDyn 帮助文档

Advanced operating instructions ....................................................................................................... 14
2.3.1 3.1
How does HDSEPP work ..................................................................................................................... 18 The Concept.................................................................................................................................... 18 Initialization (hdsepp_ini) ............................................................................................................... 18 Trajectory planning (hdsepp_make_trajectory)........................................................................ 19 Internal controller (hdsepp_driver_control)............................................................................. 19 3.1.1 3.1.2 3.1.3 3.2
RecurDyn经验帮助

【转】RecurDyn经验帮助RecurDyn, 经验1.force 就是力,也就是 F. 在RecurDyn 中力可以用公式或者方程来表示。
force 中有各种各样的力,例如spring ,bushing等Joint 就是约束,限制物体的自由度。
contact 是力的一种。
物体接触时候产生的力。
例如小球掉到地面上。
force 和 Joint 在一些极端的条件下可以等价的。
例如,绞结,你就可以用bushing 来代替,把绞结相应的钢都定义的非常大就可以了。
例如球绞结,他限制了物体连接处的x,y,z 三个方向不能运动。
如果用bushing 来代替,你可以把bushing 的X,Y,Z 的刚度都定义到很大(10E9),这样,物体在x,y,z 方向的位移非常小了-〉0 。
相当于把x,y,z都给限制住了。
这些方法可以解决一些过约束问题。
详细的你可以看一看各种力的刚度矩阵。
以及contact的力的方程。
2.怎么为FFLEX添加转动副?答:可以的,在柔性体上施加一个mpc or fdr, mpc 的master node 上施加铰接就可以了。
施加铰接的时候,选择点的时候就选择这个节点就可以。
不对NODE自由度进行拘束时,也可以用一般拘束方式(JOINTS/ Bushing)#但是要注意一点,记得把FFLEX BODY的connecting parameters内的user force connectore关闭,否则会有求解问题。
原文说明如下:Use Force Connector : It determines the connector type. If you check option, it means that you want to use a force connector. On the other hand, un-checking means that you want to use a fixed joint as a connector.3.关于柔性体,建议用R-Flex. 采用模态综合法建立柔性体。
RecurDyn培训1-1 功能简介

• 柔体:受力会引起结构的变形 • Ground Part: 参考体
– 不运动 – 建立MODEL 时自动建立 – 不增加MODEL 的自由度
RecurDyn 的子系统结构
• SubSystem 子系统:
– 在RecurDyn中可以单独对子系统进行建模
INTRODUCTION TO RecurDyn V7 R1
一个简单的例子
• • • • • 建立实体模型 添加运动副 添加驱动条件 求解设置 后处理
质心轨迹
INTRODUCTION TO RecurDyn V7 R1
反作用力
质心速度
INTRODUCTION TO RecurDyn V7 R1
多体动力学概述
• 理论基础—多体动力学是一般力学学科的重要 分支
– – – – – – 刚体动力学 分析力学 有限元理论 连续介质力学 计算力学 控制理论等
INTRODUCTION TO RecurDyn V7 R1
INTRODUCTION TO RecurDyn V7 R1
INTRODUCTION TO RecurDyn V7 R1
特色二:接触分析
• 柔性体接触的能力
– 柔性体接触一直是其他多体动 力学一直无法进行求解计算的。 – 采用MFBD技术可以很方便地 求解柔性体相互之间的接触, 柔性体和刚体之间的接触等等。
MFBD技术
INTRODUCTION TO RecurDyn V7 R1
�工程中的多体系统举例
多体动力学概述
RecurDyn 数字虚拟样机
Auto Off Road/Rail Defense General Machine
INTRODUCTION TO RecurDyn V7 R1
RecurDyn培训2-2 点和数值的参数化

练习: 2D曲柄滑块
• 创建参数点
• •
Training Manual
•
工具栏创建新模型,定义模型名称 ’ ,单位制选择默认. ‘Slider Crank_2D Crank_2D’ 在Subentity菜单栏中点击创建 Parametric Point 添加, 使用‘Add ’ 添加 Add’ Parametric Point. ’定义参 参考下图左侧点的位置,使用‘Pt Pt’ 数化点.
INTRODUCTION TO RecurDyn V7 R1练习Biblioteka 2D曲柄滑块• 创建物体
•
– Link1: between PP1 & PP2 – Link2: between PP2 & PP3 – Link3: between PP3 & PP4
Training Manual
使用Parametric Point, 创建如下几何体. 创建的几何选取的参数化点如下所示:
INTRODUCTION TO RecurDyn V7 R1
4. 使用Parametric Values定义SDPP Force 属性. 5. 执行Dynamic Analysis. 6. 添加 Parametric Value 如下: � R1: 60 � R2: 120 7. 使用R1 and R2定义 Link1 的,观察几何形 状变化.
– 从subentity菜单选择参数点项目。 在数点对话框定义名称和位置。 – 如果选择‘Pt ’ 按钮, 也可以在工作窗 Pt’ 口中选择点的位置。
INTRODUCTION TO RecurDyn V7 R1
•
连接参数点
– 可以在每个实体的属性对话框。选 ’ 按钮来定义Marker点的位置 择‘Pt Pt’
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.1界面
模型操作工具栏选择当前操作的选项,模型输入工具栏输入相应的数据。
1.2系统模式System Modes in RecurDyn
四种:
1. Model-Editing ,允许你在模型层次上对建立新的对象。
Recurdyn 默认为该模式
2. Subsystem-Editing -Work on the all of the entities in a subsystem. Lets you createobjects in your model that belong to a logical subsystem in your model. A subsystemcan contain a group of entities that are created using the process automation of aRecurDyn toolkit, such as a belt, chain, or track assembly.
3. Body-Editing - Edit a particular entity in your model, such as ground, a link, orforce.
4. Profile-Editing -Change the properties associated with a particular entity in yourmodel. 你可以通过以下操作切换到body 或property-editing
1. 在模型数据库区右击实体(entity ),在出现的menu 中选择Edit
2. 在模型窗口,双击目标。
3. Click on one of the mode tools on the toolbar.
1.3 改变重力
主菜单——>Settings ——>Gravity .
工具区
工具栏
模型窗口 模型数据库数 模型操作
输入 提示区
可以在下拉菜单中选择常规的重力加速度值。
1.4改变工作平面
选择1
1.5改变视图方向及大小View——Working Plane——Setup。