基于Windows+RTX的伺服作动系统测控软件开发
RTX-实时操作系统

使用RTX增加Windows XP/2000/XP Embedded系统的硬实时特性收藏内容简介摘要简介Windows XP平台和实时系统RTX结构深入RTX实时硬件抽象层Windows XP停止保护扩展HALRTX和中断延迟RTX中断延迟缩减技术RTX对象RTSS调度器服务请求中断Win32到RTSS的IPCRTSS代理模型控制Windows XP I/O管理器快速计时器支持动态链接库RTSS中的结构异常处理性能使用Visual Studio创建RTX应用程序性能工具目标设计者SLD未来方向结论获取渠道参考摘要由于很多商业和技术原因,Microsoft® Windows NT®、Microsoft Windows 2000、Windows XP和Windows XP Embedded操作系统越来越多被考虑作为实时系统平台。
为了满足硬实时系统严格的响应时间的要求,增加Windows XP系统的实时能力非常必要。
这篇文章介绍了美国Ardence公司的RTX产品,其在Windows平台上提供了一个实时子系统。
RTX实现了确定性的实时线程调度、实时环境和与原始Windows环境之间的进程间通讯机制以及其它只在特定的实时操作系统中才有的对Windows系统的扩展特性。
这篇文章描述了RTX怎样提供这些特性和目前的实时性能,并指出了未来性能增强的方向。
简介微软公司的Windows XP操作系统的大众接受程度和市场占有率日益扩大。
这主要是基于以下几点原因:•Windows XP平台更强的性能和更低的价格;•该平台上可运行多种应用程序;•该平台支持多种开发工具;•丰富的Win32应用程序接口;•大量的熟悉本系统的开发支持人员和最终用户。
鉴于多系统的计算环境的复杂度和所需要的额外维护成本,更多的公司倾向于将Windows XP应用到设备的所有级别上。
将其作为网络服务器或者桌面系统是很容易理解的,因为Windows XP就是为这些环境而设计的。
RTX技术详细分析
1.win32与RTX通过共享内存传输数据时,他们之间如何知道共享内存中现在有新数据?是这样的,RTX不存在这类API函数,可以直接检测共享内存中的数据是否更新。
数据的更新是由用户来控制的。
目前最常用的方法是通过发送“事件体”来实现的,用到的API函数有RtWaitForSingleObject()和RtSetEvent()。
一般是这样实现滴:譬如P1是一个RTX进程,P2是一个Win32进程。
P2等待P1向共享内存中更新数据,它使用RtWaitForSingleObject(),就是说等另一个进程给他发送一个对象(这里是事件体),此时P2处于挂起状态,不占用CPU资源。
如果P1向共享内存中写入数据完毕,它将发送RtSetEvent(),将事件体传送给系统,系统将这个事件体派发给P2,P2就知道数据更新成功了。
接下来RtWaitForSingleObject()处于激活状态,他就可以继续执行RtWaitForSingleObject()下面的API函数了,譬如叠代运算什么的。
2.我现在只会用vc的rtx向导建立rtx的应用程序,现在想做个界面,读那个rtx的应用程序的共享内存,但是RtCreateSharedMemory在界面程序里面用不了,似乎要进行一些设置,不知道怎么把rtx加到界面程序中,请大家指点。
不知道该发到哪里,就是这了,我说的rtx 不是腾汛的那个,是RTX6.0。
3.RTX能将一部分内存对Windwos隐藏,而只供RTX自己使用吗?如果可以,怎么实现?可以。
1)boot.ini中可以使用/MAXMEM:n 选项来设置最大内存。
2)可以使用RTX的API RtMapMemory() 和RtUnmapMemory()。
RtMapMemory 在用户虚拟地址空间和物理地址空间建议一个映射,给予用户直接访问物理内存的能力。
典型地,这将用来访问外设的寄存器或者映射到PC物理地址空间的缓冲区。
大流量伺服阀动态测试系统开发

大流量伺服阀动态测试系统开发方大磊【摘要】随着工业技术的快速发展,伺服控制系统应用愈加广泛,伺服阀作为其中的关键部件,其性能的好坏对于整个控制系统尤为重要,然而伺服阀的动态性能测试是研制和使用中不可缺的一个关键环节,在伺服阀技术突飞猛进发展的同时,客观上要求与之相关的测试技术也要进一步的发展和完善.介绍了大流量伺服阀的测试方法,并研制出一套完全由计算机完成的测试系统,上位机采用LabVIEW2013作为程序开发平台,试验台架可以测大流量系列的电液伺服阀(动态)性能.经实际测试,验证了本测试系统的合理性和可靠性.【期刊名称】《流体传动与控制》【年(卷),期】2017(000)006【总页数】3页(P38-40)【关键词】大流量;伺服阀;动态特性;仪器技术【作者】方大磊【作者单位】中船重工七O四研究所(海岳液压)上海 200030【正文语种】中文【中图分类】TH137伺服阀广泛应用在伺服系统中,是将电信号转化为液压信号的关键元件,伺服系统的品质直接受到伺服阀性能的影响,为了充分掌握其特性,必须进行充分的试验,动态试验:测试低压大流量、分辨率、负载流量,阶跃响应,频率特性试验。
本文介绍的伺服阀测试系统主要是测试针对大流量电液伺服阀,采用计算机辅助测试系统完成伺服阀的各项试验,试验过程中能够实时显示试验数据和曲线,对试验数据在线处理、存储、打印和管理,并且能够根据测试结果计算电液伺服阀的静动态性能指标,判断电液伺服阀的性能(主要以高频伺服插装阀为例)。
1 高频伺服插装阀液压实验台高频伺服插装阀测控实验台主要由:定量泵、蓄能器组、伺服比例高频阀带集成式模拟电子放大器,比例(节流)伺服阀(模拟放大器型号为2WRC-系列)、压力传感器、流量计、压力表等,电磁溢流阀(Rexroth)、具有高精度,高频响的压力传感器(霍尼韦尔)。
传感器及其二次仪表是测试系统的关键部分,直接决定测试精度,频率响应时间,本系统主要的传感器及二次仪表均选用进口优质产品,具体选型如下:压力传感器3套,选用美国honeywell公司的产品PX2系列传感器,量程为40 MPa,分别测量系统压力pS、伺服阀A腔压力pA和B腔压力pB;流量传感器1套,选用德国Kracht的高压齿轮流量计和二次仪表,分别测量伺服阀流量和负载流量qL;可以实现对伺服阀的动态性能的测试以及液压系统的闭环控制功能。
《测控系统原理与设计》第4章 微机测控系统中的软件
如图4.6所示为一个微机温控仪监控主程序,上电或复位后,首先进入初始化,接 着对各软、硬件模块进行自诊断,而后开放中断,等待时钟、过程通道及按键中 断。一旦发生了中断,则判明中断源后进入相应的服务模块。无论是哪一个中断 源产生中断,执行完相应的程序后,均返回监控主程序,必要时,修改显示内容, 并开始下一轮循环。
图4.7 中断流程
图4.8的外部中断输入引脚INT0′上接有4个中断源,集电极开路的非 门构成或非电路,无论哪个外部装置提出中断请求,都会使INT0引 脚 电 平 变 低 。 究 竟 是 哪 个 外 部 装 置 申 请 的 中 断 , 可 以 查 询 P1.4 ~ P1.7的逻辑电平获知,这4个中断源的优先级由软件排定。下面是有 关的程序片断,中断优先级按装置1至装置4由高到低的顺序排列。
下才执行循环操作A
图4.4 循环结构
监控程序的组成主要取决于测控系统的组成规模,以及系统的硬件 配备与功能。通常由监控主程序、初始化管理、键盘管理、显示管 理、中断管理、时钟管理、自诊断和自动/手动切换等模块组成,如 图4.5所示。
图4.5 监控程序的基本组成
测控算法程序主要实现测量与控制功能,它由描述一种或几 种测控算法(如数字滤波、PID算法等)的功能模块构成,通常为 实时中断程序或监控程序所调用。各功能模块又由各种下层模块 (子程序)所支持。其主要模块包括:
掌握面向对象的程序设计。
监控程 熟悉监控程序的功能和组成; 序设计 掌握中断和子程序管理方法;
了解硬件故障自检。
应用软件设计流程; 三种程序设计方法的特 点与区别,以及应用场 合。
中断的特点及应用; 硬件故障自检的方法与 特点。
用户界面shell(外壳),在内核之外包围着Unix的shell,它是 一个命令解释程序它控制着用户与Unix系统的交互。如图4.1所 示。
《实时操作系统RTX》课件

RTX的实时任务调度和优先级管理功能,能够根据机器人运动需求和环 境变化进行合理分配,确保关键运动优先执行。
06
RTX的未来发展
RTX与人工智能的结合
总结词
实时操作系统RTX(RTX)与人工智能(AI)的结合将为实时控制和数据处理带来更多 可能性。
详细描述
随着AI技术的不断发展,RTX可以与AI算法和模型集成,实现更高效、实时的数据处理 和控制系统。这种结合将有助于提高自动化水平和响应速度,为工业控制、无人机、机
器人等领域带来创新。
RTX在物联网中的应用
总结词
RTX在物联网(IoT)中将发挥重要作用, 为各种设备和传感器提供实时控制和数据处 理能力。
资源管理
内存管理
RTX提供内存管理机制,能够分配和回收内存资源,支持动态内存分配和垃圾回收。
中断管理
RTX能够处理外部中断,快速响应并处理中断事件,确保实时性。
实时性保障
任务优先级
RTX根据任务的重要性和紧急程度设置不 同的优先级,确保高优先级任务得到优 先处理。来自VS时间片轮转调度
RTX采用时间片轮转调度算法,确保每个 任务都能在规定的时间内得到处理。
02 消息队列具有优先级属性,高优先级消息可以中 断低优先级任务的执行。
03 消息队列可以实现异步通信、任务解耦和事件驱 动编程。
04
RTX的API接口
RTX任务管理API
RTX任务创建API
用于创建新的实时任务。该API接受任务名称、优先级、任 务函数等参数,并返回任务的ID。
RTX任务删除API
RTX在半实物仿真中的软件开发方法_闫宇壮
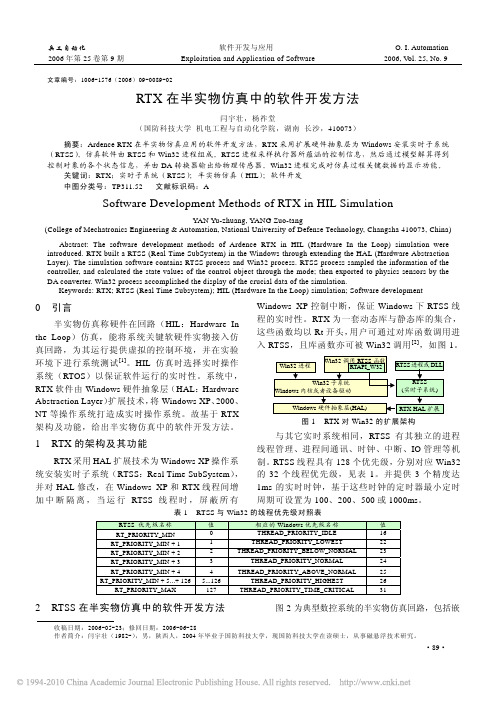
文章编号:1006-1576(2006)09-0089-02RTX在半实物仿真中的软件开发方法闫宇壮,杨祚堂(国防科技大学机电工程与自动化学院,湖南长沙,410073)摘要:Ardence RTX在半实物仿真应用的软件开发方法,RTX采用扩展硬件抽象层为Windows安装实时子系统(RTSS)。
仿真软件由RTSS和Win32进程组成。
RTSS进程采样执行器所蕴涵的控制信息,然后通过模型解算得到控制对象的各个状态信息,并由DA转换器输出给物理传感器。
Win32进程完成对仿真过程关键数据的显示功能。
关键词:RTX;实时子系统(RTSS);半实物仿真(HIL);软件开发中图分类号:TP311.52 文献标识码:ASoftware Development Methods of RTX in HIL SimulationYAN Yu-zhuang, YANG Zuo-tang(College of Mechatronics Engineering & Automation, National University of Defense Technology, Changsha 410073, China) Abstract: The software development methods of Ardence RTX in HIL (Hardware In the Loop) simulation were introduced. RTX built a RTSS (Real Time SubSystem) in the Windows through extending the HAL (Hardware Abstraction Layer). The simulation software contains RTSS process and Win32 process. RTSS process sampled the information of the controller, and calculated the state values of the control object through the mode; then exported to physics sensors by the DA converter. Win32 process accomplished the display of the crucial data of the simulation.Keywords: RTX; RTSS (Real Time Subsystem); HIL (Hardware In the Loop) simulation; Software development0 引言半实物仿真称硬件在回路(HIL:Hardware In the Loop)仿真,能将系统关键软硬件实物接入仿真回路,为其运行提供虚拟的控制环境,并在实验环境下进行系统测试[1]。
基于多特征草图的交互式地形编辑系统设计与实现
杨哲王辉柏(北方工业大学信息学院北京市100144 )摘要:本文在研究了目前交互式地形编辑技术之后,对相关问题进行改进,设计并实现了基于多特征草图的交互式地形编辑系统。
该系统分为地形特征提取、地形高程图生成、地形可视化和人机交互四个模块,可以实现高自由度的用户编辑,生成地形高程图,并可视 化为三维场景•最后通过实验验证表明,本文设计的系统运行良好,可以生成高真实感的地形高程图,并得到可视化的三维地形场景•关键词:地形特征提取;地形高程图生成;地形可视化1引言随着计算机硬件设备性能的提升,图像处理、图形学、人机交 互等技术得到了快速发展。
在交互式地形编辑方面,各应用领域更 强调编辑结果的真实感以及用户的交互体验感。
本文在对目前的交 互式地形编辑方法进行深入研究的基础上,发现目前的方法,I ?遍 存在编辑过程复杂、交互方式单一、生成结果存在人工编辑痕迹等 问题。
2相关工作目前的交互式地形编辑技术分为三个方向:基于分形噪声的地 形编辑[11、基于侵蚀模拟的地形编辑[21以及基于真实样本的地形编 辑 131。
文献141在分形布朗运动的原理基础上,介绍了多种地形表面的 创建方法。
文献151改进了传统分形噪声的地形编辑方法,提升了地 形编辑的效率。
文献161基于真实地形图,先模拟生成地形骨架,再 进一步得到地形表面,编辑得到具有随机全局统计特征的真实地形。
文献171组合了各种影响因子,控制了分形噪声产生的随机过程,可 以编辑得到不同的地形特征。
文献m 基于地形等高线数据,生成离 散三维点,进一步构建三维地形。
文献m 以真实地形图像集为基础, 进行大规模地形场景的生成。
文献11(11采用对用户草图进行细节扩 充的方式,进行地形编辑。
在研究了目前方法存在的优缺点之后, 本文设计了基于用户多特征草图的交互式地形编辑系统。
3基于多特征草图的交互式地形编辑系统设计与实现为了使用户能够自由地进行地形编辑,得到具有真实感的地 形,本文主要研宄并设计出一套基于多特征草图的交互式地形编辑 系统。
基于RTX的舵机控制系统研制
a竹技2011年第24卷第11期 Electronic Sci.&Tech./Nov.15.201 1
基于RTX的舵机控制系统研制 张蓓蕾,夏伟杰,周建江 (南京航空航天大学电子信息工程学院,江苏南京210016) 摘要设计并研制了一种基于RTX实时扩展模块的2.4 in风洞虚拟飞行试验的舵机控制系统。该系统用于采 集天平、陀螺仪、舵机、光电编码器信号,为飞机各主要部件的气动特性评估提供了重要依据。文中介绍了RTX 实时模块和硬件设计、软件设计。并通过实际应用表明,该系统具有实时性强、算法可靠、精度高、用户操作简单 等优点。 关键词RTX;驱动程序;PXI;舵控仿真 中图分类号TP273 文献标识码A 文章编号1007—7820(2011)11—077—03
Development of Control System for Steering Gear Based on RTX ZHANG Beilei,XIA Weijie,ZHOU Jianjiang (College of Electronic and Information Engineering,Nanjing University of Aeronautics and Astronautics;Nanjing 210016,China) Abstract This paper designs and develops a set of testing system for Steering Gear control of virtual flight test from 2.4 meter windtunnel based on RTX real—time extension module.The system which provides an important basis for the assessment of aerodynamic characteristics for flight major components collects Signals which are sent by Bal— anee,Gyroscope,Steering Gear,photoelectric encoder.The paper introduces RTX real time module and hardware design firstly,and then describes the software design divided into 2 parts.Finally,in conjunction with a practical application,it is more time critical,more stable when running algorithm,higher accuracy and more user-oriented. Keywords RTX;driver;PXI;steering gear control simulation
Wince XPE等操作系统比较及RTX介绍
COM-Express Compact SOM-6763
Intel® Atom™ N270
COM-Ultra SOM-7562
Intel® Atom™ N450
3.5” SBC PCM-9361
Intel® Atom™ N270
3.5” SBC PCM-9362
Intel® Atom™ N450/D510
实时性 启动时间
10秒 30秒 (需研华BIOS支持) (需研华BIOS支持) 有丰富的图形界面 有很好网络支持功能 多任务多线程 64M Memory, 300M HDD 有丰富的图形界面 有很好网络支持功能 多任务多线程 256 M Memory;800M HDD
功能支持
网络功能支持不好 单任务单线程
不同的操作系统,其性能和特点也各有差异。 选择合适的操作系统,可以大大提高你数控整机的可靠性 、稳定性。
不同Windows操作系统的比较
DOS 可直接断电关机 稳定 与 可靠性 Win CE 可直接断电关机 XPE 可直接断电关机。 XP-Pro 不可直接断电关机;如 多次直接断电关机,操 作系统就容易被损坏。
快速启动解决方案
研华可以协助你减少70%的开机启动时间
快速启动的解决方案
System Boot Process
System Power On
开机启动时间
– –
一般情况下 优化后:
1~3 分钟 3~30 秒
Boot up
BIOS
我们通过优化开机启动的各个环 节来缩短开机时间:
– –
OS
– –Байду номын сангаас–
Linux + RTai
RTX51实时操作系统PPT
15.2 RTX51的特点
➢ RTX51是一款小巧的针对基于8051核心的嵌入式系统的多 任务RTOS。使用它可以简化比较复杂、有严格时间限制 的程序的设计过程。RTX51主要有两个不同的可用版本: 标准版(RTX51-Full)和精简版(RTX51-Tiny)。
➢ 在RTX51-Full中:既可以以轮循(Round-Robin)方式执 行任务,也可以按4级任务优先级的方式切换不同优先级 的任务。以并行方式工作,支持中断管理,信号和消息 可以通过邮箱系统在不同任务之间传递。
21
用于任务管理的常见系统函数
5、os_wait 返回值:当有一个指定的事件发生时,任务被置为就绪态。
当任务继续执行时,os_wait返回重新启动任务的特 定事件。有以下可能的返回值:
事件
描述
RDY_EVENT 任务就绪标志被os_set_ready或isr_set_ready函数置位
➢ 时间片一般是比较短促的,一个时间片大约只有毫 秒级时间。正是由于这个原因,在用户看来,多个 任务似乎是在同时执行的。
11
15.3 RTX51的程序设计 —运行机制
➢ RTX51利用了一个由定时器0的中断信号驱动的定 时程序来实现上述时间片的控制。定时器产生的 周期性中断信号用来驱动RTX51的定时节拍。
4
多任务系统的执行特点
➢ 多任务系统的设计思路: 各功能模块(如显示、键盘扫描等等)处于 等同地位。 各功能模块执行顺序可在程序运行过程中动 态地改变。 各子任务在自已的时间片内运行,通过合理 设计时间片大小和各任务的优先级,可以自 然地满足系统内各种复杂的时序要求。
➢ 类似这样的任务管理和调度,就是多任务OS的 核心。
➢ 实时操作系统(Real-Time Operating System, RTOS),是指当外界事件或数据产生时,能够 接受并以足够快的速度予以处理,其处理的结 果又能在规定的时间之内来控制生产过程或对 处理系统作出快速响应,并控制所有实时任务 协调一致运行的操作系统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘
要 文章以某伺 服作 动系统测试设备 的软件研发为背景 , 针对 Widws系统 由于线程优 先级少 、 no 隐含不确定 的线程调度 机制 以
W i do s+R TX r o Acua o s e n w Se v t t rSy t m
ZHANG a g ha CHEN a d g Qin c o Xio on z
( . n h u Fl h on r lC .t 1 La z o i tC to O 1d,La z u 7 0 7 ( . ’n Te h oo ia ie st g n ho 3 0 0) 2 Xi c n lgc lUnv riy,Xi n 7 0 3 ) a ’ 1 0 2 a
及优先级倒置等原 因而造成的非实时性差 , 法满足实时测控要求 的缺 陷 , 过设计一种基 于 R 无 通 TX和 VC++ 的多任 务实时测控 系统 , 利 用 RTX来增强 Wid ws的实时性 , no 实时任务部分运行 于实 时子系统 R S下 , TS 非实时部分则运行于 Wi3 n 2子系统下 , 实时部分 和非实 时任 务之间的通信通过共享 内存的方式实现 。该系统利用 VC ++开发人机交换界面 。解决了在 Wid ws n o 无法进行实时测试 的缺陷 , 搭建一种 在 Wid ws n o 下实时测控 的软件平台 , 实现了在 Wid ws 台下对伺服作动系统的功能和性能实时检测 。 no 平
tm ee t h tt r a ro iy ls ,i lctu c rant r a ip thm eha im n ro iyi v r in la o ra i ifrn e hsp — e d fcst a h e d p irt es mpii n et i h e d ds ac c ns a dp irt n eso e d t e l medfe e c ,t i a t p rde i e sgnmuli a k t a i a urn ndc n r l n y tm a e nRTX n t t s e 1tmeme s ig a o tol gs se b s do i a dVC+ + . eRTX oi ra ewid wsra i .Re l Us t nce s n o e l me t a— t ets un n e i a k r su d rRTSS,no e l i a k r nsu d rt eW i3 y tm. C mmu iain b t e a k a er aie h h rd m n ra- met s u n e h n 2 s se t o nc to e we n ts s cn b e lzd byt e s a e
关键词 多任 务 ; 时 控 制 ; 服 作 动 系 统 实 伺
T 4.4 N9 8 6 中图分类号
De eo me to e s rn n n r l n o t r s d o v l p n fM a u i g a d Co to l g S fwa e Ba e n i
m e r d .Th y tm s sVC + + t e eo u a -o mo ymo e es se u e o d v lp h m n c mpue n e a t n i e fc . I ov d t e d f c h twid wsc n o e 1 trit rci ntra e ts le h ee tt a n o a n tr a o
t e t s i g Bu l n o e ltme c n r ls fwa e p a f r a e l e e lt e d f c o e v c u t r s s e f nc i n a d p r i e tn . m i a wi d ws r a — i o t o o t r l t o m nd r a i d r a - i e e t f r s r o a t a o y t m u to n e d z m f r n e i nd ws p a f r o ma e n wi o l t o m.
Ke o d mul a k,ra—i o to ,s r oa t ao y tm yW rs tts i e ltmec n r l e v cu trs se Cls m b TN9 8 6 a s Nu er 4.4
Abs r c Th s p pe a e o t r e e o me to e v c u t rs s e t s q p nta a k r u d I iw ft e wi d ws s s ta t i a r t k s s fwa e d v l p n n s r o a t a o y t m e te ui me s b c g o n . n v e o h n o y —
总第 2 1 7期 21 0 2年 第 5期
计算机与数字工程
Co p tr& Dii lEn ie r g m ue gt gn ei a n
Vo . 0 N伺 服 作 动 系统 测控 软件 开 发 n o +R X
张 强朝 陈晓 东。