康复机械手汇总
康复机器人概述

DOI:10.3969 ̄.issn.1001—1242.2015.04.024 1 北京 大学第 一医院康复医学科 ,北 京市西城 区西什库大街 8号,100034;2 通讯作者 作者 简介 :周媛 ,女 ,博士研 究生 ;收稿 日期 :2014—03.18
2 康 复 机 器 人 的 分 类 现有 的康复 机器人可 以从不 同角度进行 分类 。按 照功
能 目的可粗 略的分为 :辅助/替代型 和训练/治疗 型等 。按照 其针 对 的躯体 部位 ,可分 为上肢机器人 、下 肢机器人 和手部 机器人 ;按照人机结合 的方式 ,可分为外骨骼式和嵌合式 ;按 照其 移动方式 ,可分 为固定式和移动式 。 2.1 辅助/替代 型机器人
配机器手 臂”机 器手 ,可在水平 面 内移动 ,有结 构轻便 、响应 快的特点 ,是许 多康复机器人项 目的基础 。上述两类有代表 性的机器人都存在着与环境整合 不理想的问题 。
床旁 机器 人 的典 型代 表是 Handyl,是 目前 销量 最大 的 康 复机器 人之一 。Handy1设 计 的初衷 是给残 障人士 喂食 , 近来 也逐渐开 发出盥洗 、剃须 、化妆 等功能 。与其功能相 类 的 还 有 Winsford feeder (RTD—ARC,New Jersey, us)、 MySpoon (Secom Co.Ltd,Tokyo,Japan)和 Neater Eater (Buxton,UK)等 。此类 机器 人系统 为有特 殊需 求的 人们 提 供了较大 的自主性 ,使他 们增 加了融人到“正常”环境 中的机 会 。 2.1.2 移 动式机器人 :移 动式机器人 包括智 能轮椅 、轮椅 机 器人和 自动机器人 。智 能轮椅 能够 自动获取外 界地 标 ,以确 定 自身位置 和移动路 线 。代 表产 品有 Wheelesley机 器人 轮 椅系统 、PamAid及其衍 生产品 Guido机器人助 步器 】。轮 椅 机 器人 是安 装在 轮椅 上 的机 械手 ,以 Manus和 Raptor为代 表 。前 者是具有 7个 自由度 的机械手 ,具有 良好 的纵 向活动 度并 能紧密折叠 后置 于轮 椅侧 面 1;后 者的设计 与 Marius相 类 ,但是 以牺牲 3个 自由度 为代价 ,将 价格 降为 Manus的 1/ 3。 自动机 器人种类较少 ,代表 是移 动作业辅 助机器人 (Mo. bile Vocational Assistant Robot,MoVAR)系统 、凯斯 特康复 工 程 系 统 (KAIST Rehabilitation Engineering System, KARES)II,以及 Wessex机器人 。MoVAR系统 是带 轮子 的 DeVAR机器人 ,并 配有摄像头及 周边 地图 ,可以在仪表盘 上 的显示器 中给 出反馈 。KARES Ⅱ系统 的设 计探 索 了多种 控制模 式 ,包括视觉伺 服 、眼控 鼠标 、触觉 包 ,以及远程控 制 的机械手 。Wessex机器人是一种可 移动 式家用机器人 ,旨在 满 足家居生 活中在多个房 间内频繁移动 的需求 。 2.1.3 智能假 肢 和支具 :采 用 自动 控制技 术 的假 肢/支 具被 称为智 能假 肢伎 具 。 目前较成 熟 的智 能假肢 产 品有 Utah/ MIT人 工臂 ,其设计 涵盖 了 自肩 关节 至腕关节 的上肢全长 , 末端连接装饰性义手或钩形设备 ;分级 电控假肢手南安普敦 手 ,可以模 拟真实的人手进行 多个 轴向的活动 ;以及 以南安 普顿手i41和爱丁堡 臂系统 1为基础 的复合上 肢高使用性 全组
康复诊疗机器人
• 由于我国的康复医学事业仍然处于起步阶段, 但患者数量多、治疗师资源缺乏,据此现状, 发展康复训练医疗机器人系统更具实际意义。 随着康复医疗机器人的研究和使用,有望简化 医师与患者“一对一”的繁重治疗过程,推动残 疾人“人人享有康复服务”这一目标的实现,提 高残疾人的生活质量。同时,通过临床上使用 积累的大量数据,将有助于认识训练参数与康 复效果之间的关系,从而能够在机器人辅助脑 神经康复治疗上取得更大的突破。因此,康复 医疗训练机器人技术在现代康复医学和神经反 馈训练有广泛的应用前景。
新型柔性三维力/温度触觉传感器 阵列设
• 随着智能机器人广泛的应用于人体健康、 体育训练、康复医疗、生物等诸多领域, 传感器的多功能化成为传感器发展的趋势。 • Alirezaei等人利用压力敏感导电橡胶研制了 应用于机器人关节部位能实现柔性变形的 触觉分布式传感。 • Hidekuni等人利用硅IC的柔性变形技术设计 了具有压力、硬度和温度分布敏感的集成 式触觉传感器阵列。
• 这种机械手系统都是需要由视觉、灵巧操 作、运动、传感、导航及系统控制等电子 系统组成,要求比较高,价格也是相对的 比较昂贵。
康复治疗机器人研究现状
• 康复治疗机器人是康复医学和机器人技术 的完美结合,不再把机器人当作辅助患者 的工具,而是把机器人和计算机当作提高 临床康复效率的新型治疗工具。康复治疗 机器人在医疗实践上主要是用于恢复患者 肢体运动系统的功能。
相关研究课题举例
• 本上肢康复训练机器人用于中风偏瘫患者 的康复训练。 • 采用穿戴式外骨骼设计,由气动驱动。
• 该机器人既能直接准确地模拟手臂的各种 运动,又能利用患者的一侧健康手臂自主 运动信息直接驱动患者另一侧患肢作随动 康复运动。
步行康复训练机器人
残疾军人康复辅助器具配置目录精选全文完整版

3
10010
装饰性肘离断假肢
具
装饰被动功能手、硅胶手套、可辅助持物。定制双层树脂接受腔。
适用于不能穿戴功能性假肢的肘部和前臂极短残肢截肢, 弥补外观缺损。
3
10011
索控机械式肘离断假肢
具
机械手、硅胶手套,能主动持物,铰链式肘关节。牵引索控制假手开、闭和肘关节屈、伸。定制双层树脂接受腔及肩背带。
适用于肩锁关节脱位整复后的固定。
1
20013
肩外展矫形器(肩外展支架)
具
热塑板,泡沫衬材,金属件,成品,可调式。
适用于肩关节及肱骨骨折、臂丛神经损伤及术后固定。
1
20014
平衡式前臂矫形器(BFO)
具
热塑板,泡沫衬材,金属件,成品,安装在轮椅上使用。
适用于C4以上神经损伤,肩、肘屈伸肌力为1-2级以上,能稳定坐在轮椅上的四肢麻痹者,辅助障碍者上肢运动,如吃饭、喝水等。
适用于胫腓骨或膝部骨折,固定踝关节于功能位。
1
20033
膝矫形器
只
聚乙烯板材,取型制作。
适用于大腿、小腿骨折或神经韧带损伤及畸形和术后,固定下肢,矫正畸形,帮助恢复膝关节功能。
1
20034
膝踝足矫形器
只
聚乙烯板材,金属支条,取型制作。
适用于大腿、小腿骨折或神经损伤、下肢瘫或下肢肌力不足及术前、术后,固定膝、踝关节。
1
20005
腕手静态矫形器
具
热塑板材,固定带,保持功能位或中立位。
用于掌腕部骨折、腕部损伤及术后固定。
2
20006
腕手动态矫形器
具
热塑板材,金属条,弹性装置。
《肢康复机械人》课件

脑卒中康复
运动治疗
机械人可帮助脑卒中患者康复, 恢复受损肢体的功能。
机械人可用于运动治疗,提升 运动能力和身体协调性。
脊椎损伤康复
机械人可辅助脊椎损伤患者进 行康复训练,恢复肢体功能和 步态。
肢康复机械人的优势和意义
个性化康复
机械人能根据患者的特定 情况提供个性化的康复方 案,提高康复效果。
节省人力
《肢康复机械人》PPT课件
欢迎大家来到今天的演讲。我将为您介绍肢康复机械人的定义、原理和技术、 应用领域、优势和意义、发展前景,以及它所面临的挑战和限制。让我们一 起来探索这个令人振奋的领域!
肢康复机械人的定义
肢康复机械人是一种应用机器人技术的辅助装置,旨在帮助肢体受损人士恢 复运动和功能。它与人体肢体结构相似,并具备智能控制系统。
全球应用
肢康复机械人将在全球范围内得到广 泛应用,改善康复护理质量,提高患 者的生活质量。
肢康复机械人的挑战和限制
1 成本昂贵
肢康复机械人的研发和 生产成本较高,限制了 其普及和应用范围。
2 技术限制
3 疗效验证
目前,肢康复机械人的 技术还存在一些局限性, 如精确度不够高、适用 范围有限等。
机械人的康复效果尚需 更多科学数据和临床验 证来支持,以确保其安 全有效。
结论和展望
肢康复机械人是康复医学领域的重要创新,它有助于改善患者的康复效果和生活质量。然而,仍需努力 克服挑战,使机械人技术更加先进和广泛应用。
机械人可以替代人工疗法, 减轻医护人员的负担,节 省人力资源。
持续监测
机械人能够持续监测患者 康复进展,及时调整治疗 计划,提供精确的康复指 导。
肢康复机械人的发展前景
1
成本降低
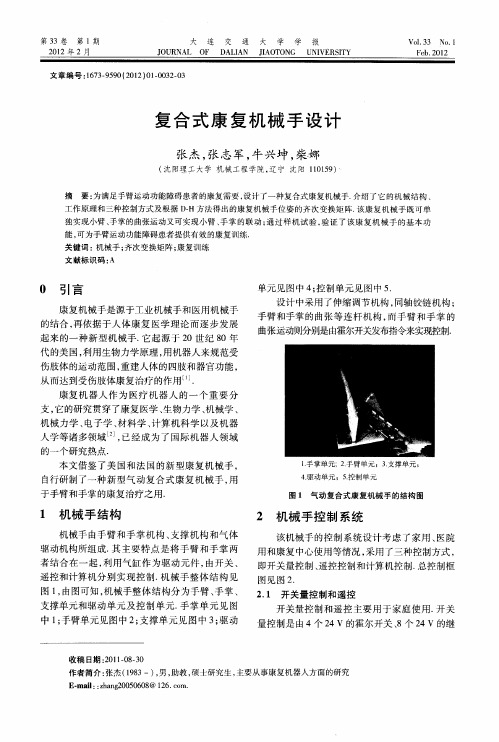
复合式康复机械手设计
2 1 开关量控 制 和遥控 .
开 关量控 制 和 遥控 主要 用 于 家庭 使 用 . 关 开 量 控制 是 由 4个 2 的霍尔 开关 、 2 4V 8个 4V的继
收 稿 日期 : 1—83 2 0 —0 01
作者简 介 : 张杰 (9 3一)男 , 18 , 助教 , 硕士研究生 , 主要 从事康复机器人方面的研 究
电器再 控 制 电磁 铁 1使 其气 缸 1的 上腔 进 气 , 手
臂完 成 向左摆 动 . 手臂 走 到终 点位 置后 , 尔开 关 霍
5动 作 控制 电磁 阀 2动 作 , 其 气 缸 1的下 腔 进 使 气, 实现 手臂 的换 向 . 此后再 分 别 由霍 尔开关 1和 2控 制 电磁 铁 l和 2来 实 现 手 臂 机 构 的循 环 往 复 运动 , 带动 手臂 的 不断 的往 复运 动. 来
独实现小臂 、 掌的曲张运动 又可实现小臂 、 手 手掌 的联 动 ; 过样 机试验 , 证 了该 康复 机械 手的基本 功 通 验
能 , 为手臂运 动功 能障碍患者提供有效 的康 复训练 . 可
关键词 :机械 手 ; 齐次变换矩阵 ; 康复训练
文献标识码 : A
0 引 言
康 复机械 手是 源于 工业机 械 手和 医用机 械手 的结 合 , 依据 于人 体康 复 医学 理 论 而 逐 步发 展 再
图 1 气 动 复合 式 康 复 机 械 手 的结 构 图
1 机械 手 结构
机械 手 由手 臂 和手 掌 机 构 、 撑机 构 和气 体 支
驱动 机构 所组 成 . 主要 特 点 是 将 手臂 和手 掌 两 其
2 机 械 手 控 制 系统
该 机械手 的控 制 系统 设 计 考 虑 了家 用 、 院 医 用 和康 复 中心使用 等情 况 , 用 了三种控 制方 式 , 采 即开关 量控制 、 控控制 和计 算机 控制 . 遥 总控 制框
下肢康复机器人

在专业医师或治疗师的指导下,患者使用下肢康复机器人进 行康复训练,包括被动训练、主动训练和抗阻训练等。
效果评估指标及方法
效果评估指标
评估指标包括患者的下肢运动功能、 日常生活活动能力、生活质量等方面 。
效果评估方法
可以采用量表评估、观察患者康复过 程中的变化以及对比治疗前后的数据 等方法进行评估。同时,结合患者的 自我感受和反馈,对康复效果进行综 合评价。
05
挑战与未来发展方向
技术难题及解决方案探讨
技术难题1
机器人灵活性不足。解决 方案:采用新型的机械臂 设计,使用更灵活的驱动 器和传感器。
技术难题2
机器人智能化程度不够。 解决方案:引入深度学习 和人工智能技术,实现机 器人自适应和自主决策。
技术难题3
机器人安全性不够。解决 方案:设计更严格的安全 标准和控制算法,确保机 器人的操作安全。
02
下肢康复机器人概述
定义与分类
定义
下肢康复机器人是一种辅助患者 进行下肢康复训练的医疗设备, 通过机器人技术帮助患者进行有 针对性的康复训练。
分类
根据应用场景和功能特点,下肢 康复机器人可分为不同类型,如 被动式、主动式、主被动式等。
工作原理及特点
工作原理
下肢康复机器人通过传感器、控制系 统和执行器等组成部分协同工作,实 现患者下肢的运动轨迹模拟、力量传 递和反馈控制等功能。
特点
下肢康复机器人具有高精度、高稳定 性和高安全性的特点,能够根据患者 的实际情况进行个性化的康复训练, 提高康复效果。Leabharlann 应用领域及优势应用领域
下肢康复机器人广泛应用于康复医疗机构、养老院、家庭等场景,为患者提供 安全、有效的康复训练服务。
智能康复机器人:帮助患者恢复自理能力

智能康复机器人:帮助患者恢复自理能力在医疗科技的广阔海洋中,智能康复机器人犹如一艘扬帆起航的巨轮,承载着无数患者重获生活自理能力的希望。
它们不仅是冷冰冰的金属和电路的组合,更是温暖人心、点亮希望的明灯。
首先,让我们来描绘一下这些智能康复机器人的形象。
它们不同于传统医疗设备的呆板和单一,而是拥有着灵活的关节、精准的传感器和人性化的设计。
它们就像是患者的贴心伙伴,能够根据患者的身体状况和康复需求,提供个性化的康复方案。
它们的出现,让康复治疗不再是一场枯燥乏味的战斗,而是一场充满乐趣和挑战的游戏。
然而,智能康复机器人并非万能的救世主。
它们虽然拥有先进的技术和强大的功能,但仍然无法完全替代医生和护士的角色。
在康复过程中,患者需要的是全方位的关怀和支持,包括心理疏导、营养指导等。
因此,我们不能过分夸大智能康复机器人的作用,而应该将其视为医疗团队中的一员,与其他医护人员共同为患者的康复努力。
那么,智能康复机器人究竟能为患者带来哪些实际的帮助呢?首先,它们能够提供精准有效的康复训练。
通过高精度的传感器和先进的算法,智能康复机器人能够实时监测患者的运动状态,并根据患者的反馈进行调整。
这样一来,患者就能够在安全的环境下进行高强度的康复训练,从而更快地恢复身体功能。
其次,智能康复机器人还能够减轻医护人员的工作负担。
在传统的康复治疗中,医护人员需要花费大量的时间和精力来指导患者进行训练。
而有了智能康复机器人的帮助,医护人员可以将更多的精力投入到其他重要的工作中去,从而提高整体的医疗服务质量。
当然,我们也不能忽视智能康复机器人带来的一些潜在问题。
例如,过度依赖机器人可能导致患者缺乏自主锻炼的动力;同时,高昂的研发和维护成本也可能成为限制其普及的因素。
因此,我们需要在推广和应用智能康复机器人的过程中,保持理性和谨慎的态度。
最后,我想用一句话来形容智能康复机器人的价值:它们是患者重获生活自理能力的得力助手。
在未来的发展中,我相信智能康复机器人将会发挥越来越重要的作用,为更多的患者带来希望和改变。
康复训练的重要器械介绍
康复训练的重要器械介绍康复训练是一种通过运动和治疗手段,帮助患者恢复功能、提高生活质量的综合性疗法。
在康复过程中,适当选择和使用合适的康复训练器械可以起到事半功倍的效果。
本文将介绍几种常见的康复训练器械,以帮助读者更好地了解康复训练的工具和方法。
一、平衡训练球平衡训练球,也称为瑞士球或健身球,是一种用弹性材料制成的球状物。
它可以用来进行平衡、力量和柔韧性训练。
通过坐立或站立在球上,患者可以锻炼核心肌群的稳定性,提高平衡能力和协调性。
平衡训练球还可以用于康复治疗中的背部伸展、康复理疗以及身体姿势的调整,对于改善患者的姿势控制和稳定性非常有效。
二、弹力带弹力带是一种柔软且具有弹性的绷带,常用于康复训练中的肌肉力量锻炼。
它可以提供可变的阻力,适应患者的不同力量水平和运动能力。
通过和弹力带的配合使用,患者可以进行多种不同的力量训练,如肌肉伸展、肌肉收缩和肌肉耐力训练。
弹力带还可以用于矫正姿势、激活肌肉、缓解慢性疼痛,并且非常方便携带,可以在家中或者办公室进行锻炼。
三、步态训练器步态训练器是一种特殊设计的装置,用于改善患者步态的稳定性和协调性。
它可以模拟正常行走的动作,帮助患者重新学习走路的技巧和恢复正常的步态模式。
步态训练器一般配备有扶手和安全带,可以根据患者的需要进行调整。
通过使用步态训练器,患者可以逐渐增加步态训练的难度和强度,提高行走能力和身体平衡性。
四、电动踏步机电动踏步机是一种通过模拟步行运动进行康复训练的设备。
它可以根据患者的步幅和速度进行调整,适用于各种不同程度的患者。
通过使用电动踏步机,患者可以进行有氧运动、踏步训练和下肢肌肉锻炼,促进血液循环和心肺功能改善。
此外,电动踏步机还可以帮助患者恢复正常步态和行走能力,提高肌肉协调性和平衡性。
五、手部康复器械手部康复器械主要用于恢复手指、手掌和手腕的力量和功能。
常见的手部康复器械包括手指力量训练器、手握球和手腕力量训练器等。
通过使用这些器械,患者可以增加手指和手腕的灵活性、力量和协调性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
远端横向拱,第3掌骨的头部是可以移动的,也凹于 掌心,它被称为掌骨拱门。
这些弧是由正常的张力的韧带连接他们,并为相应 的行缩短肌肉。横向连接的两个圆弧纵向。
人类的手的能力来自于这些弧的能力,以适应不 同姿势,实现一个对物体更好的控制,除了能掌握不规则 形状的物体和众多的体积。
康复机械手
王佳域:1427049227 吴晗: 1427049129
外骨骼康复机械手的仿真设计
外骨骼机器人应于康复医学的最前沿科技
它是根据人手的各种运动特征设计的,将其穿戴于患者 手部生理机能丧失或者障碍的手上,可以辅助患者完成 各种难以完成的动作。
优点: 一、通过建立患者数据库,可以针对不同患者的个体差
ห้องสมุดไป่ตู้
原创视频
国外研究现状
2004年,英国曼彻斯特大学的科研人员设计出一种外骨豁式的 康复机械手机构(如图1.1所示),它采用了模块化的结构设计 思想,实现了人体手部四个手指的康复运动。同时,美国的卡内 基梅隆大学机器人研所的科研人员研制出一种新型的手部CPM机
仿真
柔性弧的设计
手的结构与形状被定义为骨性体系,在这个地方手 指,掌的维度和角度可以获得,骨头排列的三段弧,其中 两个横向和一个纵向。
异性,进行有差别的量化治疗;
二、可以通过网络连接数据库实现远程治疗; 三、医生根据数据库可以对病症进行量化分析,有助于
建立系统的康复训练理论。现有的手部康复治疗,主要 通过专业医师进行康复训练。
本课题设计的是一种针对人体手部康复的外骨豁康复机 械手,利用可穿戴式的外骨豁机械手系统来驱动患者手 指指节的运动,使患者能够模拟在日常的生活中所需要 手部的运动,从而达到人体手部各个关节的运动康复锻 炼以及神经功能的康复训练,使外骨豁康复机械手与人 体手指能够协调的运动,从而达到最佳的手部康复训练 效果。