手指训练的康复机械手设计
手部康复产品设计方案模板
手部康复产品设计方案模板一、产品概述手部康复产品是专门针对手部受伤、功能障碍或康复需求的患者而设计的辅助工具。
通过提供适当的支撑和运动训练,帮助患者恢复手部功能,提高生活质量。
本设计方案旨在介绍手部康复产品的设计理念、产品功能、使用方法以及后续推广和销售策略。
二、设计理念1. 解决手部康复需求:基于市场需求和用户反馈,设计方案旨在提供具有良好功能性和舒适性的手部康复产品,帮助患者实现手部功能的恢复和重建。
2. 人性化设计:注重产品的舒适度和便捷性,采用符合人体工程学原理的设计,确保产品在长时间佩戴或使用过程中不会对患者的手部健康造成负面影响。
3. 多功能性:产品应该具备不同功能模块的可替换性,以满足不同手部康复需求的患者。
同时,设计方案也要考虑扩展性,以支持未来更多潜在的康复需求。
三、产品功能1. 支撑功能:提供稳定的支撑力,防止进一步损伤或扭曲手部。
2. 运动训练功能:引导用户进行特定的手部运动,加强力量、灵活性和协调性。
3. 应变调节功能:可以根据患者手部康复进展的需要,调整支撑力度和运动难度。
4. 通风透气功能:采用透气材料,保持手部皮肤干燥,提供良好的使用体验。
5. 防滑功能:确保产品在佩戴或使用过程中不易滑脱,提供额外的安全保护。
四、使用方法1.适应人群:手部受伤、功能受限或需要康复的患者。
2.佩戴方法:根据手部受伤位置和功能障碍程度,选择适合的产品型号,并根据产品说明书正确佩戴。
3.训练建议:根据康复师或医师的指导,进行相应的手部运动训练,确保正确使用产品,并持续跟踪康复进展。
五、推广和销售策略1.市场调研:通过市场调研了解目标用户需求、竞争对手情况和市场潜力,为产品推广和销售提供有针对性的策略。
2.渠道合作:与康复机构、医院和医疗设备供应商建立合作关系,将产品推向康复专业领域。
3.品牌宣传:通过线上和线下渠道宣传品牌和产品,提高知名度和用户信任度。
4.用户培训:组织康复方案和产品使用培训,提供专业的技术支持和售后服务,增强用户黏性和口碑。
一种新型手部康复机器人的设计与分析
一种新型手部康复机器人的设计与分析刘更谦1,安宁1,路光达2,陈贵亮1(1.河北工业大学机械工程学院,天津300130;2.天津职业技术师范大学天津市信息传感与智能控制重点实验室,天津300222)来稿日期:2017-12-10基金项目:天津市高等学校科技发展基金计划项目(20140714)作者简介:刘更谦,(1965-),男,河北人,博士研究生,教授,主要研究方向:机器人技术及应用;安宁,(1989-),男,河北人,硕士研究生,主要研究方向:机器人技术及应用1引言人的手不仅可以完成很多粗大运动而且可以完成很多精细的运动,这些运动在人类日常生产生活中发挥着不可替代的作用。
神经性的损伤会大大削弱手的主要功能,从而严重影响患者的日常生活质量[1]。
其中,脑卒中是造成的手部神经损伤是最主要的原因。
调查显示:脑卒中后约有(55~75)%的患者会遗留肢体功能障碍,而手部功能障碍占到其中的八成以上,这其中只有30%的患者能实现手功能的完全恢复[2]。
神经康复领域的研究成果表明,中枢神经系统具有高度的可塑性,在神经康复过程中,特定的功能训练是必不可少的,这为康复机器人的研究提供了重要的理论依据[3]。
现有的康复理疗主要是通过康复理疗师对患者进行一对一的人工辅助康复,这种康复方法不仅费时、费力、价格昂贵,而且不适宜在病患家中进行康复。
机器人辅助康复的方法可以克服以上缺陷,因此手部康复机器人应运而生。
近几年随着机器人信息技术的发展,虽然手部康复及机器人技术有了长足的进步,但不可否认还存在着很多有待解决的问题:部分设备采用欠驱动方式,无法实现对手指各关节的独立驱动[4];文献[5]采用平行四边形连杆机构对食指各个关节进行独立驱动,大大降低了控制的难度,但是由于掌指关节两侧生物结构的特殊性,外骨骼的旋转中心无法跟中指以及无名指掌指关节旋转轴线重合,使得该机构无法应用于上述两指的康复。
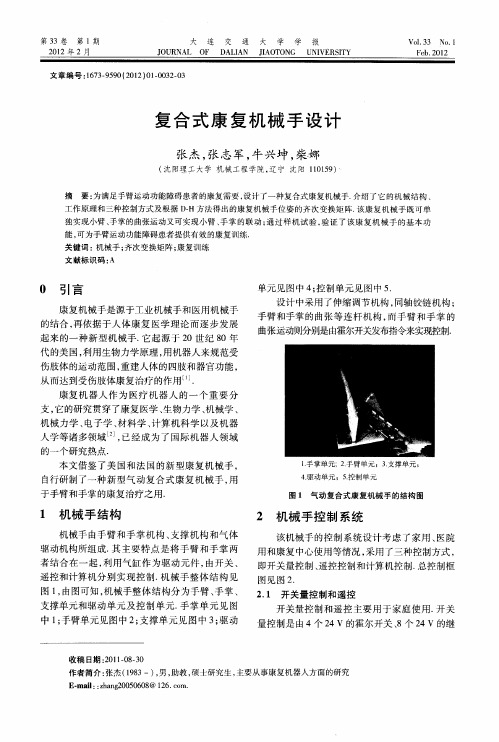
只在指尖放置了测量接触力的传感器,无法实现对作用在手指关节上力矩的精确测量;文献[6]提出了一种柔索驱动外骨骼式机器人,可以将驱动部件放置在远端,减轻了作用在手指上的重量,但是外骨骼采摘要:针对意外伤害及脑卒中等造成的手部运动功能障碍问题,设计了一种新型手部康复机器人。
面向手功能康复训练的软体机器人设计
第33卷第8期中国机械工程V o l .33㊀N o .82022年4月C H I N A M E C HA N I C A LE N G I N E E R I N Gp p.883G889面向手功能康复训练的软体机器人设计丛㊀明1㊀毕㊀聪1㊀王明昊1㊀刘㊀冬1㊀杜㊀宇21.大连理工大学机械工程学院,大连,1160242.大连大华中天科技有限公司,大连,116023摘要:为解决现阶段软体机器人与人手贴合较差㊁自由度不够㊁驱动力小等问题,设计了一种带有双向弯曲模块和伸长模块㊁可实现多个自由度独立或耦合运动的软体机器人.利用有限元仿真分析方法建立了软体驱动器模型,融合多种柔性材料,保证驱动器可以提供足够大的驱动力.利用传感器实现了对弯曲特性的跟踪.实验验证表明:该软体机器人可以完成抓握训练㊁手势训练等,满足患者不同康复阶段的训练要求,指尖力可达到5.1N ,可对患者日常的手部康复训练运动起到辅助作用.关键词:软体机器人;康复训练;柔性材料;气动网络;有限元方法中图分类号:T H 122D O I :10.3969/j.i s s n .1004 132X.2022.08.001开放科学(资源服务)标识码(O S I D ):D e s i g no f S o f tR o b o t s f o rH a n dF u n c t i o nR e h a b i l i t a t i o nT r a i n i n gC O N G M i n g 1㊀B IC o n g 1㊀WA N G M i n g h a o 1㊀L I UD o n g 1㊀D U Yu 21.S c h o o l o fM e c h a n i c a l E n g i n e e r i n g ,D a l i a nU n i v e r s i t y o fT e c h n o l o g y ,D a l i a n ,L i a o n i n g,1160242.D a l i a nD a h u a z h o n g t i a nT e c h n o l o g y C o .,L t d .,D a l i a n ,L i a o n i n g,116023A b s t r a c t :I no r d e r t o s o l v e t h e p r o b l e m s s u c h a s p o o r f i t b e t w e e n s o f t r o b o t a n dh u m a nh a n d ,i n Gs u f f i c i e n tD O F a n d l o wd r i v i n g f o r c e ,a k i n d o f s o f t r o b o tw i t hb i Gd i r e c t i o n a l b e n d i n g mo d u l e a n d e l o n Gg a t i o nm o d u l ew a sd e s i g n e d ,w h i c h m i g h t r e a l i z e i n d e p e n d e n to rc o u p l e d m o t i o n so fm u l t i pl eD O F .U s i n g F E Ma n a l y s i s ,a s o f t d r i v e rm o d e l w a s e s t a b l i s h e d a n d a v a r i e t y of f l e x i b l em a t e r i a l sw e r e f u s e d t o e n s u r e t h a t m igh t p r o vi d es u f f i c i e n td r i v i n g f o r c e s .T h es e n s o r sw e r eu s e dt ot r a c kt h eb e n d i n g c h a r a c t e r i s t i c s .E x p e r i m e n t a l r e s u l t s v e r i f y t h a t t h e s o f t r o b o t sm a y c o m p l e t e g r i p t r a i n i n g an d g e s t u r e t r a i n i n g ,e t c .,a n d m e e t t h e t r a i n i n g r e q u i r e m e n t so f p a t i e n t sa td i f f e r e n t r e h a b i l i t a t i o ns t a ge s .T h ef i ng e r t i p f o r c em a y r e a ch 5.1N ,a n di tm a y p l a y a n a u x i l i a r y r o l e i n t h e d a i l y h a n d r e h a b i l i t a t i o n t r a i n Gi n g of p a t i e n t s .K e y wo r d s :s o f t r o b o t ;r e h a b i l i t a t i o nt r a i n i n g ;f l e x i b l em a t e r i a l ;p n e u m a t i cn e t w o r k ;f i n i t ee l e Gm e n tm e t h o d (F E M )收稿日期:20210111基金项目:国家自然科学基金(61873045);大连市科技创新基金(2019J 12G X 043)0㊀引言由脑卒中引起的手部运动功能丧失严重影响一个人的正常生活,并降低其生活质量[1].对于这类患者,需要手部康复机器人做日常生活辅助,以及针对患者不同阶段手部僵硬程度进行相应的整体抓握或单个手指分离运动的被动康复训练[2].早期研究人员提出了穿戴在手掌掌背侧的外骨骼式[3G5]以及穿戴在手掌掌心侧的内骨骼式[6]两类刚性手部康复机器人,但刚性机器人柔性不足㊁与手指贴合性较差,容易造成人手的二次伤害且不易携带.近年来,随着软体机器人和软材料科学等领域的快速发展,手功能康复训练机器人逐渐从刚性结构转变为柔性结构.软体康复训练机器人常由硅橡胶[1,7G10]㊁电介质弹性体(d i e l e c t r i ce l a s t o Gm e r ,D E )[11]㊁电活性聚合物(e l e c t r o a c t i v e p o l y Gm e r ,E A P )[12]㊁形状记忆合金(s h a p em e m o r y a l Gl o y,S MA )[13]等柔性材料制成,集成到手套中实现可穿戴和便携性.硅橡胶执行器因制备简单㊁成本低而被广泛采用.硅橡胶制成的软体手功能康复机器人常采用气动网络型[1,10]和纤维增强型[7G9]两类结构.气动网络结构最早用于康复手套,由哈佛大学P O L Y G E R I N O S 等[1]提出,利用充气时上下层结构的不同伸长率产生弯曲来驱动手指运动,但执行器整体只能产生曲率一致的弯曲.随后,P O L Y G E R I N O S 等[7G8]又提出了纤维增强结构,并利用纤维增强原理设计了软体康复手套,解决了整体式弯曲结构与人手贴合性不好的问题.以388 Copyright ©博看网. All Rights Reserved.气动网络和纤维增强两种结构为原型,软体康复手套又被设计为仿鱼骨结构[9]和分段式结构[10]等,实现了更高的灵活性.国内外文献中所提到的大多数软体机器人[1,7,9G13]只能驱动手指做简单的屈伸运动,实现握拳或抓取的运动.生活中常有如捏取等动作,这类动作只需要两根或三根手指的协作即可完成,并且人手各个关节弯曲角度不同,现有的驱动器[1G10]没有很好地区分不同关节的弯曲角度差异,大多设计为整体弯曲式的结构,导致与人手贴合性较差.手指掌关节不仅可以正向弯曲也可以反向实现小角度的运动,具有正向弯曲和反向主动伸缩的自由度[14],文献中常缺少对反向自由度的研究与描述.本文结合分段式结构的优点设计一种带有双向弯曲模块和伸长模块的可穿戴的手部软体康复机器人.分模块对各个关节和指节进行设计,该软体机器人掌关节可以实现正反方向不同角度的弯曲,手指的各关节可以独立或耦合运动,对手指多个自由度进行训练,指节的伸长模块可以在手弯曲时伸长13.2%,能在手指弯曲时对关节部分结构的弯折作一定的长度补充,保证人手弯曲时执行器与手指生物关节更好地对齐,较好地模拟人手的运动特性,提高手部康复训练效果.通过结构上的改进及提供气压的增大,驱动力较文献[15G16]中提到的4N有了进一步的提高.1㊀功能分析及原理设计1.1㊀功能分析本设计的目标是为处于不同阶段的脑中风患者提供被动训练,通过重复的运动训练,逐渐恢复手指的运动功能,另一目标是做日常生活的辅助.设计软体驱动器结构,并集成到可穿戴软体机器人上,以手套的形式固定在每根手指上.气体作为驱动源,通过对驱动器加压提供辅助力量,使患者手指完成规定的运动[1].为此本文开发一种能够帮助脑中风患者完成手部康复训练的可穿戴机器人.遵循人手的运动特性设计面向手功能康复训练的软体机器人具有如下功能:(1)软体驱动器在加压时可以弯曲成近似封闭的拳头,也可以通过掌指关节的主动伸缩,实现对手掌肌肉的拉伸,各手指和各关节可以耦合或独立运动,提高手部的灵活性和力量;(2)驱动器遵循手指的运动规律,指节具有伸长模块,并且可以提供足够大的驱动力;(3)软体机器人穿戴部分的手套质量不超过0.5k g[8],执行器的宽度和高度与成年人手尺寸相近[17],符合便携性要求,可以轻松地将其戴上或取下,可以在手指开闭时实现小范围的尺寸可调性,符合安全性要求.1.2㊀原理设计从形态和功能仿生的角度出发,设计能尽量时刻与人手贴合的执行器,如图1所示.为了舒适地驱动手的弯曲和伸展,分别对各个关节和指节进行设计,近指关节(p r o x i m a l i n t e r p h a l a n g e a l p o i n t,P I P)和远指关节(d i s t a li n t e r p h a l a n g e a l p o i n t,D I P)采用气动网络结构(图1②),掌指关节(m e t a c a r p o p h a l a n g e a l p o i n t,M C P)结合了快气网[1]和慢气网[18]结构,指节采用中空的增强型结构[19](图1③).图1㊀软体驱动器结构F i g.1㊀T h e s t r u c t u r e o f t h e s o f t a c t u a t o r在手指弯曲或伸展时由于关节相对关系的变化,导致执行器关节与人手生物关节相对位置有所偏移,因此需要将指节模块设计为可伸长的间隔腔型结构,上下边长分别为d1㊁d2,如图1所示.间隔腔型结构类似于纤维增强原理,可以限制执行器的径向膨胀,保证更好的轴向伸长功能.人手掌指关节可以完成弯曲和反向主动伸缩两个方向的运动且正反方向的运动范围不同,根据气动网络原理[1,18]设计双向弯曲的掌指关节模块,运动范围为正向0~90ʎ,反向0~20ʎ,上层的正向弯曲结构采用快气网(f P N)原理[1],下层的反向弯曲结构采用慢气网(s P N)原理[18],气室高度为h,模块长度为d,宽度为s,如图1所示.所设计的掌指关节可以实现给上层或下层加压相同时产生不同的弯曲角度,且各层的结构互为另一层的限制层.近指关节和远指关节设计为图1所示形状.1.3㊀关节结构参数确定根据人手生物结构和运动特性,从仿生的角度确定执行器外观结构后,再通过仿真分析评价气动网络结构各几何参数对弯曲效果的影响来确定具体参数取值.五根手指采用基本相同的结构设计,驱动器的宽s为20mm,高h为15mm,长度尺寸参数如表1所示.488中国机械工程第33卷第8期2022年4月下半月Copyright©博看网. All Rights Reserved.表1㊀指节及关节长度参数T a b.1㊀K n u c k l e a n d j o i n t l e n g t h p a r a m e t e r s mm掌指关节d 近端指骨d1/d2近端关节d1/d2中间指骨d1/d2远端关节d1/d2远端指骨d1/d2拇指1829/3222/1612/1822/1612/15食指2025/2822/168/1422/169/12中指2229/3222/1612/1822/169/12无名指2025/2822/168/1422/169/12小指1821/2422/166/1222/167/10㊀㊀手指各关节活动范围如下(下标m代表大拇指)[19]:-20ʎɤθM C Pɤ90ʎ,0ʎɤθP I Pɤ110ʎ,0ʎɤθD I Pɤ90ʎ;0ʎɤθmM C Pɤ70ʎ,0ʎɤθm P I Pɤ80ʎ,0ʎɤθm D I Pɤ90ʎ.采用气动网络结构设计的关节的弯曲变形不仅与输入压力有关,还与结构本身的参数有关.输入相同压力时,气室的高度越大,弯曲变形越大;气室的个数越多,弯曲变形越大.手指的关节长度参数是确定的,因此可以通过改变气室高度参数来确定最佳执行器的结构.确定执行器外壁厚2mm㊁内壁厚1.5mm,长度d1=22mm,d2=16mm,高15mm,宽20mm.气室高分别设定为h=6.5,7,7.5,8,8.5mm,利用有限元仿真得到关节在最大压力60k P a下的弯曲角度θ,将载荷分成若干级,逐步施加到结构上,然后按照各个阶段不同的非线性性质逐步求解得到关节压力G角度模型,如图2所示.图2㊀关节pGθ关系模型F i g.2㊀T h e r e l a t i o n s h i p m o d e l o f pGθ根据图2所示的压力G角度模型,结合手指关节的运动范围,选择近侧指间关节气室高度h=8mm,远侧指间关节气室高度h=7mm.保证近侧关节弯曲角度接近110ʎ,远侧关节弯曲角度接近90ʎ,符合手指的运动特性.2㊀软体驱动器建模㊁分析及制造2.1㊀有限元建模该执行器采用超弹性材料硅橡胶(M4635A)制成,超弹性材料具有不可压缩㊁大变形㊁非线性三个特性.由于硅橡胶材料在外力作用下材料特性和几何特性都呈非线性变化,所以通常采用应变能密度函数来表示其力学性能[20G22].对于硅橡胶这种大变形行为材料,适合用Y e o h模型模拟,Y e o h模型具有用简单的单轴拉伸试验数据描述其他变形的力学行为的能力[20G22],其应变能密度函数模型为W=ðN i=1C i0(I-3)i+ðN k=11d k(J-1)2k(1)㊀㊀应变能函数为w=C10(I-3)+C20(I-3)2(2)式中,J为变形后与变形前的体积比,对于不可压缩材料, J=1;I为第一应变张量不变量,为一常数;N㊁d k㊁C10㊁C20为材料常数.通过硅橡胶试样的拉伸试验得到模型系数C10=0.125,C20=0.0075.本构曲线如图3所示.图3㊀Y e o h模型单轴拉伸试验曲线F i g.3㊀U n i a x i a l t e n s i l e t e s t c u r v e o fY e o hm o d e l基于所设计的结构,利用A B A Q U S软件对手部执行器进行受力和变形分析.材料是超弹性硅橡胶,选用Y e o h模型定义执行器的材料特性,定义材料参数密度为1130k g/m3,系数C10=0.125,C20=0.0075,对模型进行网格划分,消除重力的作用.仿真得到手指在握拳弯曲及反向主动伸缩运动时输入的压力与角度之间的关系.图4所示为单根手指在压力分别为0,11.25,19.69,30.32,40,60k P a时的弯曲情况以及在0,50,100k P a下反向主动伸缩手指的形态.(a)人手正向弯曲图㊀㊀㊀㊀(b)弯曲建模(c)人手反向主动伸缩图(d)主动伸缩建模图4㊀弯曲、主动伸缩建模F i g.4㊀M o d e l i n g b e n d i n g a n da c t i v e e x p a n s i o n588面向手功能康复训练的软体机器人设计 丛㊀明㊀毕㊀聪㊀王明昊等Copyright©博看网. All Rights Reserved.由图4可知,手指在60M P a压力下弯曲成近似多边形形状,可以完成日常生活中抓取和握拳等动作;在100M P a下反向主动伸缩可以实现对患者手部肌肉的拉伸,促进手部功能的恢复.2.2㊀软体机器人制造流程为保证软体康复训练机器人具有灵活性和适应性,满足驱动力和弯曲角度的要求,本文融合硅橡胶及凯夫拉纤维线等多种柔性材料,采用模具设计㊁手指浇筑㊁驱动器成形㊁整体制作等多步工艺制造软体机器人,充分利用和发挥柔性材料的柔顺性,及其非线性㊁黏弹性和迟滞特性等在软体康复手运动和控制中的作用,降低控制的复杂度,实现灵活性和良好的交互性.软体机器人的制造流程如图5所示.图5㊀软体机器人制造流程F i g.5㊀S o f t r o b o tm a n u f a c t u r i n gp r o c e s s手功能康复训练机器人的每根驱动器由三个关节和三段指节组成,利用模型求反的原理设计模具.为保证更多的自由度㊁实现对各个关节和指节的独立控制,将管路接口均设置在上方,以实现对康复机器人的单个单元控制或者多个单元协同控制.驱动器由邵氏硬度为37H A的硅橡胶制成,加压时关节结构由于上下层不同的变形产生弯曲,指节结构会有一定程度的伸长,保证与人手指更好的贴合效果.以10ʒ1比例混合均匀硅胶A 和B,真空脱气;采用压铸一体式的模具,恒温箱加速固化后,用原硅胶混合液粘在一起制成单根手指,指节部分外侧缠绕凯夫拉纤维线[8],绕线的间距为3.5mm,角度为ʃ6ʎ,限制径向膨胀,保证伸长效果并提供足够大的驱动力.利用气管连接气动控制系统和执行器的各个气室,通过调节气压大小及管路的开闭实现对各个关节弯曲角度的控制和对各个指节伸长率的控制.采用3D打印技术制成手掌,所设计的手掌由大手掌㊁小手掌和可调连接部分组成,其中可调连接部分为硅胶材料,可实现一定程度的调节以更好地适应人手.弯曲传感器固定在手掌的五根手指对应位置,浇筑五根气动手指并集成在手掌上制成康复手套,整个康复手套的质量约为400g,符合便携性的要求,患者可以通过佩戴手套进行康复训练.3㊀运动行为控制实验3.1㊀实验平台手部康复训练机器人实验平台由支架及控制系统组成.气动控制系统由压力泵㊁微型控制器㊁减压阀㊁节流阀㊁两个两位三通电磁阀㊁压力传感器和连接器组成.向微型控制器输入预设压力值,由微型控制器控制压力泵工作,气体通往执行器所连通的气室,使关节和指节实现弯曲或伸长.实验平台如图6所示.图6㊀实验平台F i g.6㊀T h e e x p e r i m e n t p l a t f o r m控制系统单片机处理单元采用A r d u i n o控制整个气路,并通过安装在手掌上的弯曲角度传感器对软体康复训练机器人的弯曲特性进行角度定位及角度跟随的精确控制.驱动器由柔性材料硅橡胶制成,在内部气压变化下实现连续的弯曲变形.由于材料的非线性,在驱动器手指下侧黏附弯曲传感器来监测弯曲情况,利用电阻式角度弯曲传感器F l e xS e n s o r4.5获取手部动作实时角度信息.对弯曲传感器进行标定,并结合气压传感器拟合气压与弯曲角度之间的关系,保证输入气压与手指弯曲角度值的准确对应,通过预先设定具体气压值来实现对各个手指弯曲运动的精确控制.3.2㊀单根手指实验对气动手指关节分别施加0,20,30,40,50,688中国机械工程第33卷第8期2022年4月下半月Copyright©博看网. All Rights Reserved.60k Pa 的压力,待被测手指稳定后测量手指的变形情况,如图7所示.以掌指关节端的中心为原点(0,0),由掌指关节指向指尖的方向为X 轴正方向,垂直向上的方向为Y 轴正方向,对手指末端轨迹的(x ,y )坐标进行跟踪,并对比有限元和实验,结果如图8所示.手指在受到气压驱动时会发生图7所示的向下弯曲,符合人手握拳时的运动特性,逐渐弯曲成类似的多边形拳头状.随着气压增大,手指末端的坐标位置变化规律为:x 坐标逐渐变小,y 坐标先变小后逐渐变大.实验曲线与仿真结果基本一致,均符合人手握拳时指尖相对掌关节位置的运动规律,具体坐标值如表2所示.图7㊀单根气动手指弯曲变形F i g .7㊀S i n g l e p n e u m a t i c f i n ge r b e n ds 图8㊀指尖轨迹F i g .8㊀F i n g e r t i p t r a j e c t o r y表2㊀指尖坐标T a b .2㊀T i p o f t h e f i n ge r c o o r d i n a t e s mm气压(k P a)02030405060实验104,077,-7523,-8910,-87-15,-65-29,-40仿真104,088,-5545,-86-11,-76-24,-51-32,-20㊀㊀对气动手指指节施加60k P a 的压力,指节可以伸长13.2%,保证在手弯曲时执行器与人手的生物关节对齐;掌关节具有双向弯曲模块,可以反向主动伸缩,保证对手掌肌肉的拉伸,达到康复训练效果.指节轴向伸长及掌关节反向弯曲效果如图9所示,掌关节下层的慢气网结构在施加60k P a压力时会有反向主动伸缩效果;指节在不加压时约为38mm ,施加60k P a 压力长度约为43mm .图9㊀指节伸长及掌关节反向弯曲效果F i g .9㊀K n u c k l e e l o n g a t i o na n db e n d i n g ef f e c t o f m e t a c a r p a l jo i n t r e v e r s a l 驱动器除了要符合人手运动特性外,也要提供人手日常所需的驱动力.对驱动器施加压力,测量不同气压下指尖力的大小,测量结果如图10所示,在80k P a 下指尖力可以达到5.1N ,满足人手日常生活的需求.图10㊀指尖力结果F i g .10㊀F i n g e r t i p fo r c e r e s u l t 3.3㊀康复训练实验处于不同阶段的脑中风患者手部僵硬程度有所不同,需要根据每个阶段的特点进行康复训练.早期阶段,手指较僵硬应采用抓握训练;恢复中期需要进行小范围的手指康复运动,对每个手指进行分离运动并逐步增大手指康复运动的范围;训练后期患者手指具有一定的自主伸缩能力,可以进行一些特定的手势训练提高手指的灵活性[23].拇指与其他指尖的相对接触即对指运动需要拇指的每一个自由度和对侧手指关节的协调,对指运动可以体现康复训练后期手指运动功能的恢复[24].为验证软体机器人的康复训练效果,进行了抓取实验㊁单指和对指运动实验及手势训练实验,如图11~图13所示.图11中软体康复手对圆柱形㊁球形和方形物体从不同角度进行抓取,并实现抓握和捏两种方788 面向手功能康复训练的软体机器人设计丛㊀明㊀毕㊀聪㊀王明昊等Copyright ©博看网. All Rights Reserved.图11㊀抓取实验F i g .11㊀G r a b e x pe r i m e nt (a)单指运动(b)对指运动图12㊀单指㊁对指运动实验F i g .12㊀S i n g l e f i n g e r ,o p p o s i t e f i n g e r e x pe r i m e nt 图13㊀手势训练实验F i g .13㊀G e s t u r e e x pe r i m e n t 式.图12完成单指运动和对指运动,图13完成两种手势运动,验证手指独立和耦合运动的灵活性.图11~图13的实验表明所设计的软体康复机器人能满足患者手指不同阶段僵硬程度的康复训练.所设计的软体康复手符合人手运动和力的要求,加压时可近似弯曲成多边形形状,指尖力可达到5.1N .其中掌关节可实现双向弯曲运动,对手掌内侧肌肉进行拉伸;指节可实现伸长效果,保证与人手生物关节对齐,更好地贴合人手.4㊀结论本文基于气动网络原理设计了一种分段式结构的可穿戴软体康复机器人,掌关节结合快气网和慢气网设计成双层结构,指节采用增强型结构.该装置可以实现掌指关节弯曲及主动伸缩双向运动㊁单个手指和多根手指的独立和耦合运动,辅助日常生活中抓㊁握㊁捏等动作,并完成特定手势动作,装置具有伸长模块,60k P a 下可伸长13.2%,保证与人手生物关节的对齐;采用多材料集成,保证执行器能提供足够大的驱动力,80k P a 下指尖力达到5.1N ;基于传感器感知信息,对执行器的弯曲特性进行角度定位及角度跟随的精确控制.运动和力的实验结果与仿真结果相近,验证了手功能康复训练软体机器人的可行性,双向弯曲模块及伸长模块的设计保证了康复训练的效果.参考文献:[1]㊀P O L Y G E R I N O S P ,L Y N E S ,WA N G Z ,e t a l .T o w a r d s a S o f t P n e u m a t i cG l o v e f o rH a n dR e h a b i l i Gt a t i o n [C ]ʊI E E E /R S JI n t e r n a t i o n a lC o n f e r e n c eo n I n t e l l i g e n t R o b o t s a n d S y s t e m s (I R O S ).T o k y o ,2013:1512G1517.[2]㊀郭本浩.手功能康复训练机器人硬件系统的设计与实现[D ].上海:上海师范大学,2019.G U OB e n h a o .D e s i g na n d I m p l e m e n t a t i o no fH a r d Gw a r e S ys t e m o f H a n d F u n c t i o n R e h a b i l i t a t i o n T r a i n i n g R o b o t [D ].S h a n g h a i :S h a n g h a i N o r m a l U n i v e r s i t y,2019.[3]㊀C H R I S T O P H E R NS ,S A S HABG ,R A H S A A NJH ,e t a l .D e v e l o p m e n ta n dP i l o tT e s t i n g o f H E X GO R R :H a n dE X OS k e l e t o nR e h a b i l i t a t i o nR o b o t [J ].J o u r n a lo f N e u r o E n g i n e e r i n g a n d R e h a b i l i t a t i o n ,2010,7(1):7G36.[4]㊀U E K IS ,K AWA S A K IH ,I T O S ,e t a l .D e v e l o pGm e n t o f aH a n d Ga s s i s tR o b o tw i t h M u l t i Gd e gr e e s Go f Gf r e e d o m f o r R e h a b i l i t a t i o n T h e r a p y [J ].I E E E /A S M E T r a n s a c t i o n s o n M e c h a t r o n i c s ,2012,17(1):136G146.[5]㊀王启申,李继婷.手康复机器人钢丝绳G绳套传动系统中的摩擦补偿[J ].机器人,2014,36(1):1G7.WA N G Q i s h e n ,L I J i t i n g .F r i c t i o nC o m p e n s a t i o n i n W i r e r o p e Gb e a r i n g S ys t e m o f H a n d R e h a b i l i t a t i o n R o b o t [J ].R o b o t ,2014,36(1):1G7.[6]㊀B O U Z I T M ,B U R D E A G ,P O P E S C U G ,e t a l .T h eR u t g e r sM a s t e rⅡN e w D e s i g nF o r c e Gf e e d b a c k G l o v e [J ].I E E E /A S M E T r a n s a c t i o n s o n M e c h a Gt r o n i c s ,2002,7(2):256G263.[7]㊀P O L Y G E R I N O SP ,WA N GZ ,O V E R V E L D EJTB ,e t a l .M o d e l i n g o fS o f tF i b e r Gr e i n f o r c e dB e n d i n gA c t u a t o r s [J ].I E E E T r a n s a c t i o n s o n R o b o t i c s,2015,31(3):778G789.[8]㊀P O L Y G E R I N O SP ,WA N G Z ,G A L L OWA Y K ,e t a l .S of tR o b o t i cG l o v ef o rC o m b i n e d A s s i s t a n c e a n dA t Gh o m eR e h a b i l i t a t i o n [J ].R o b o t i c s &A u t o n G888 中国机械工程第33卷第8期2022年4月下半月Copyright ©博看网. All Rights Reserved.o m o u sS y s t e m s,2015,73(S):135G143.[9]㊀J I A N G Y,C H E N D,L I U P,e t a l.F i s h b o n eGi n s p i r e dS o f tR o b o t i cG l o v e f o rH a n dR e h a b i l i t a t i o nw i t h M u l t iGd e g r e e sGo fGf r e e d o m[C]ʊ2018I E E EI nGt e r n a t i o n a lC o n f e r e n c eo n S o f t R o b o t i c s.L i v o r n o,2018:394G399.[10]㊀WA N GJ,F E IY,P A N G W.D e s i g n,M o d e l l i n ga n dT e s t i n g o faS o f tP n e u m a t i cG l o v ew i t hS e gGm e n t e dP n e u N e t s B e n d i n g A c t u a t o r s[J].I E E E/A S M E T r a n s a c t i o n so n M e c h a t r o n i c s,2019,24(3):990G1001.[11]㊀S H I N T A K E J,R O S S E T S,S C HU B E R T B,e t a l.V e r s a t i l eS of tG r i p p e r s w i t hI n t r i n s i cE l e cGt r o a d h e s i o nB a s e do n M u l t i f u n c t i o n a l P o l y m e rA cGt u a t o r s[J].A d v a n c e d M a t e r i a l s,2016,28(2):231G238.[12]㊀S H E N Q,T R A B I A S,S T A L B A UM T,e t a l.A M u l t i p l eGs h a p e M e m o r y P o l y m e rGm e t a lC o m p o s i t eA c t u a t o rC a p a b l e o f P r o g r a mm a b l eC o n t r o l,C r e aGt i n g C o m p l e x3D M o t i o no fB e n d i n g,T w i s t i n g,a n d O s c i l l a t i o n[J].S c i e n t i f i c R e p o r t s,2016,6:24462.[13]㊀L A S C H IC,C I A N C H E T T I M,MA Z Z O L A IB,e t a l.S of tR o b o tA r mI n s p i r e db y t h eO c t o p u s[J].A d v.R o b o t,2012,26(7):709G727.[14]㊀熊有伦,熊蔡华.机器人多指抓取的研究进展与展望[J].华中科技大学学报(自然科学版),2004,32(S1):5G10.X I O N G Y o u l u n,X I O N G C a i h u a.R e s e a r c h P r oGg r e s s a n dP r o s p e c t o fR o b o tM u l t iGf i n g e rGg r a b b i n g[J].J o u r n a lo f H u a z h o n g U n i v e r s i t y o fS c i e n c ea n dT e c h n o l o g y(N a t u r a lS c i e n c eE d i t i o n),2004,32(S1):5G10.[15]㊀韩旭.可延展关节的软体外骨骼手指及其制备的研究[D].哈尔滨:哈尔滨工业大学,2018.HA N X u.R e s e a r c h o nF l e x i b l eE x o s k e l e t o nF i n g e rw i t h E x t e n s i b l e J o i n t s a n d I t s F a b r i c a t i o n[D].H a r b i n:H a r b i n I n s t i t u t e o fT e c h n o l o g y,2018.[16]㊀袁路林.软体外骨骼康复手系统设计与实现[D].武汉:华中科技大学,2018.Y U A N L u l i n.D e s i g na n dI m p l e m e n t a t i o no fS o f tE x o s k e l e t o nR e h a b i l i t a t i o nH a n dS y s t e m[D].W uGh a n:H u a z h o n g U n i v e r s i t y o fS c i e n c ea n dT e c h n oGl o g y,2018.[17]㊀刘冬,王明昊,毕聪,等.刚软结合可穿戴手部康复装置设计[J].中国机械工程,2021,32(8):930G937.L I U D o n g,WA N G M i n g h a o,B IC o n g,e t a l.D eGs i g n o fa W e a r a b l e H a n d R e h a b i l i t a t i o n D e v i c ew i t hR i g i da n dS o f tC o m b i n a t i o n[J L].C h i n a M eGc h a n i c a l E n g i n e e r i n g,2021,32(8):930G937.[18]㊀M O S A D E G H B,P O L Y G E R I N O SP,K E P L I N G E R C,e t a l.P n e u m a t i c N e t w o r k sf o rS o f t R o b o t i c sT h a t A c t u a t e R a p i d l y[J].A d v a n c e d F u n c t i o n a lM a t e r i a l s,2014,24(15):2163G2170.[19]㊀赵芳.软体外骨骼手部康复机器人的研究[D].天津:天津理工大学,2016.Z HA OF a n g.R e s e a r c h o nH a n dR e h a b i l i t a t i o nR oGb o tw i t h S o f t E x o s k e l e t o n[D].T i a n j i n:T i a n j i nU n i v e r s i t y o fT e c h n o l o g y,2016.[20]㊀王永冠,李心,黄友剑.橡胶计算中本构模型的选择[C]ʊ 时代新材杯 全国橡胶制品技术研讨会.株洲,2007:443G449.WA N G Y o n g g u a n,L IX i n,HU A N G Y o u j i a n.S eGl e c t i o no f C o n s t i t u t i v eM o d e l i nR u b b e r C a l c u l a t i o n[C]ʊ N e w M a t e r i a lC u p N a t i o n a lR u b b e rP r o dGu c tT e c h n o l o g y S e m i n a r.Z h u z h o u,2007:443G449.[21]㊀殷闻,靳晓雄,仝光.两种常用橡胶本构模型的有限元分析及其仿真[J].上海电机学院学报,2010,13(4):33G36.Y I N W e n,J I N X i a o x i o n g,T O N G G u a n g.F i n i t eE l e m e n t A n a l y s i sa n d S i m u l a t i o n o f T w o C o mGm o n l y U s e dR u b b e rC o n s t i t u t i v eM o d e l s[J].J o u rGn a l o f S h a n g h a i I n s t i t u t e o fE l e c t r i c a l E n g i n e e r i n g,2010,13(4):33G36.[22]㊀陈家照,黄闽翔,王学仁,等.几种典型的橡胶材料本构模型及其适用性[J].材料导报:纳米与新材料专辑,2015(29):118G120.C H E N J i a z h a o,HU A N G M i n x i a n g,WA N GX u e r e n,e t a l.S e v e r a lT y p i c a l C o n s t i t u t i v eM o d e l so fR u b b e r M a t e r i a l sa n d T h e i r A p p l i c a b i l i t y[J].M a t e r i a l sG u i d e:N a n oa n d N e w M a t e r i a l s,2015(29):118G120.[23]㊀何雷.手功能康复训练机器人的设计与实现[D].上海:上海师范大学,2019.H E L e i.D e s i g n a n d I m p l e m e n t a t i o n o f H a n dF u n c t i o n R e h a b i l i t a t i o n T r a i n i n g R o b o t[D].S h a n g h a i:S h a n g h a iN o r m a lU n i v e r s i t y,2019.[24]㊀刘成龙.面向手部运动功能康复的双向软体致动器的设计[D].武汉:华中科技大学,2019.L I U C h e n g l o n g.D e s i g no fB i d i r e c t i o n a lS o f t w a r eA c t u a t o r f o rR e h a b i l i t a t i o no f H a n d M o t o rF u n cGt i o n[D].W u h a n:H u a z h o n g u n i v e r s i t y o fs c i e n c ea n d t e c h n o l o g y,2019.(编辑㊀袁兴玲)作者简介:丛㊀明,男,1963年生,教授㊁博士研究生导师.研究方向为机器人与自动化技术的研究与应用.EGm a i l:c o n g m@d l u t.e d u.c n.刘㊀冬(通信作者),男,1985年生,副教授㊁博士研究生导师.研究方向为智能机器人与系统,软体机器人. EGm a i l:l i u d o n g@m a i l.d l u t.e d u.c n.988面向手功能康复训练的软体机器人设计 丛㊀明㊀毕㊀聪㊀王明昊等Copyright©博看网. All Rights Reserved.。
多指灵巧手设计
多指灵巧手设计
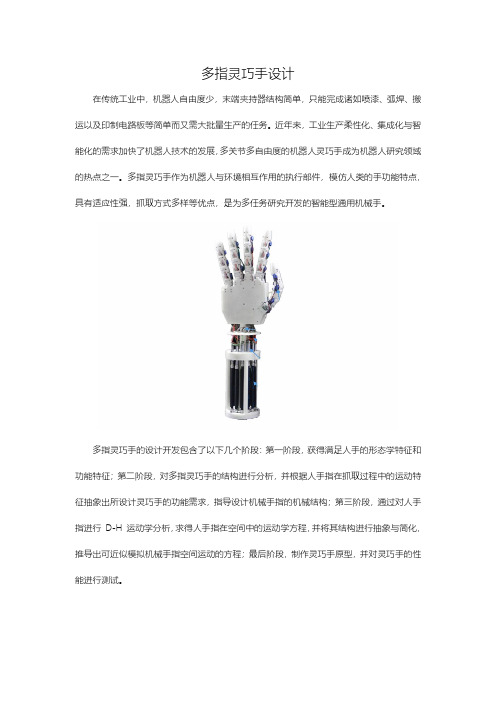
在传统工业中,机器人自由度少,末端夹持器结构简单,只能完成诸如喷漆、弧焊、搬运以及印制电路板等简单而又需大批量生产的任务。
近年来,工业生产柔性化、集成化与智能化的需求加快了机器人技术的发展,多关节多自由度的机器人灵巧手成为机器人研究领域的热点之一。
多指灵巧手作为机器人与环境相互作用的执行部件,模仿人类的手功能特点,具有适应性强,抓取方式多样等优点,是为多任务研究开发的智能型通用机械手。
多指灵巧手的设计开发包含了以下几个阶段:第一阶段,获得满足人手的形态学特征和功能特征;第二阶段,对多指灵巧手的结构进行分析,并根据人手指在抓取过程中的运动特征抽象出所设计灵巧手的功能需求,指导设计机械手指的机械结构;第三阶段,通过对人手指进行D-H 运动学分析,求得人手指在空间中的运动学方程,并将其结构进行抽象与简化,推导出可近似模拟机械手指空间运动的方程;最后阶段,制作灵巧手原型,并对灵巧手的性能进行测试。
浙江工业大学机械学院的研究人员就对多指灵巧手的设计做了研究。
在研究的第一阶段,需要提取人手的自然特征。
为探索不同的抓取姿势以及被抓取物体的尺寸对手指各关节间角度变化、角速度变化、指尖运动轨迹及相关性的影响,在受试者手部关节处贴了25个反光标记点,使用NOKOV(度量)光学三维动作捕捉系统采集多位受试者的抓取运动数据,对手部关节位置信息进行分析,计算各关节间角度变化、角速度变化、指尖运动轨迹及相关系
数并进行对比分析。
械结构设计,开展后面阶段的工作,目前灵巧手原型已经完成制作。
康复机械手
国外研究现状
ቤተ መጻሕፍቲ ባይዱ
2004 年,英国曼彻斯特大学的科研人员设计出一种外骨豁式的 康复机械手机构 ( 如图 1.1 所示),它采用了模块化的结构设计 思想,实现了人体手部四个手指的康复运动。同时,美国的卡内 基梅隆大学机器人研所的科研人员研制出一种新型的手部CPM机
仿真
柔性弧的设计
手的结构与形状被定义为骨性体系,在这个地方手 指,掌的维度和角度可以获得,骨头排列的三段弧,其中 两个横向和一个纵向。 近端横向拱,以头状花序的为中心、以相对固定和 凹于掌心,它的别名叫“手、腕部拱门。 远端横向拱,第3掌骨的头部是可以移动的,也凹于 掌心,它被称为掌骨拱门。 这些弧是由正常的张力的韧带连接他们,并为相应 的行缩短肌肉。横向连接的两个圆弧纵向。 人类的手的能力来自于这些弧的能力,以适应不 同姿势,实现一个对物体更好的控制,除了能掌握不规则 形状的物体和众多的体积。
本课题设计的是一种针对人体手部康复的外骨豁康复机 械手,利用可穿戴式的外骨豁机械手系统来驱动患者手 指指节的运动,使患者能够模拟在日常的生活中所需要 手部的运动,从而达到人体手部各个关节的运动康复锻 炼以及神经功能的康复训练,使外骨豁康复机械手与人 体手指能够协调的运动,从而达到最佳的手部康复训练 效果。
原创视频
康复机械手
王佳域:1427049227 吴晗: 1427049129
外骨骼康复机械手的仿真设计
外骨骼机器人应于康复医学的最前沿科技 它是根据人手的各种运动特征设计的,将其穿戴于患者 手部生理机能丧失或者障碍的手上,可以辅助患者完成 各种难以完成的动作。
优点: 一、通过建立患者数据库,可以针对不同患者的个体差 异性,进行有差别的量化治疗; 二、可以通过网络连接数据库实现远程治疗; 三、医生根据数据库可以对病症进行量化分析,有助于 建立系统的康复训练理论。现有的手部康复治疗,主要 通过专业医师进行康复训练。
手指训练的康复机械手设计

20093802图1装置的各个机械部件手指训练的康复机械手设计梁字辉,周宏甫(华南理工大学,广东广州560140)收稿日期:2008-09-13,协助患者完成指骨三个关节的屈伸运动,且三个关节的运动彼此独立。
;设计文献标识码:A文章编号:1009-9492(2009)02-0084-021概述各种神经肌肉紊乱如中风等导致手部偏瘫功能丧失是很常见的,而手部的屈伸运动又是最经常受损的机动功能,这严重影响了患者的个人自理能力,给社会和家庭造成较大负担。
研究表明除必要的药物介入外,适当的运动训练对患者肢体功能的恢复有很大的辅助作用[1]。
机器人装置被引入以协助患者完成运动训练。
康复机器人是工业机器人和医用机器人的结合,最终目标是恢复人体肌体组织的运动功能,实现肌体组织的自然化动作[2]。
从功能上可分为康复训练机器人和辅助型康复机器人,康复训练机器人的主要功能是帮助患者完成各种运动功能恢复训练,如手臂运动训练、行走训练、脊椎训练运动等。
康复机器人技术在欧美国家得到普遍重视[4]。
本文针对手部偏瘫患者设计了一种手部辅助训练装置协助患者完成指骨的屈伸运动。
该装置由电机驱动,可使指骨的三个关节各自独立运动。
2外骨胳康复机械手的体系结构该康复机械手由三个彼此独立的装置组成,三个部分设计基本相同,独立完成指骨一个关节的屈伸运动。
每一部分主要由一对相互啮合的齿轮及其它附属零部件组成。
整个装置的各个组成部分如图1所示。
小齿轮由一个微型主流电机带动,利用齿轮的啮合运动带动大齿轮,大齿轮后方附有一连接臂随大齿轮一起作圆周运动。
连接臂的另一端焊接在一对金属夹棒上,金属加持棒紧贴手指关节末端的上下两侧。
正是加持棒随大齿轮的圆周运动实现手指关节的屈伸运动,电机的正反转动完成手指的屈伸运动,整个装置的装配图如图2所示,为组装后的完整装置。
3外骨胳康复机械手的外骨胳设计整个装置由三个相互独立的关节组成,实现整个手指的屈伸运动。
如图3所示。
复合式康复机械手设计
2 1 开关量控 制 和遥控 .
开 关量控 制 和 遥控 主要 用 于 家庭 使 用 . 关 开 量 控制 是 由 4个 2 的霍尔 开关 、 2 4V 8个 4V的继
收 稿 日期 : 1—83 2 0 —0 01
作者简 介 : 张杰 (9 3一)男 , 18 , 助教 , 硕士研究生 , 主要 从事康复机器人方面的研 究
电器再 控 制 电磁 铁 1使 其气 缸 1的 上腔 进 气 , 手
臂完 成 向左摆 动 . 手臂 走 到终 点位 置后 , 尔开 关 霍
5动 作 控制 电磁 阀 2动 作 , 其 气 缸 1的下 腔 进 使 气, 实现 手臂 的换 向 . 此后再 分 别 由霍 尔开关 1和 2控 制 电磁 铁 l和 2来 实 现 手 臂 机 构 的循 环 往 复 运动 , 带动 手臂 的 不断 的往 复运 动. 来
独实现小臂 、 掌的曲张运动 又可实现小臂 、 手 手掌 的联 动 ; 过样 机试验 , 证 了该 康复 机械 手的基本 功 通 验
能 , 为手臂运 动功 能障碍患者提供有效 的康 复训练 . 可
关键词 :机械 手 ; 齐次变换矩阵 ; 康复训练
文献标识码 : A
0 引 言
康 复机械 手是 源于 工业机 械 手和 医用机 械手 的结 合 , 依据 于人 体康 复 医学 理 论 而 逐 步发 展 再
图 1 气 动 复合 式 康 复 机 械 手 的结 构 图
1 机械 手 结构
机械 手 由手 臂 和手 掌 机 构 、 撑机 构 和气 体 支
驱动 机构 所组 成 . 主要 特 点 是 将 手臂 和手 掌 两 其
2 机 械 手 控 制 系统
该 机械手 的控 制 系统 设 计 考 虑 了家 用 、 院 医 用 和康 复 中心使用 等情 况 , 用 了三种控 制方 式 , 采 即开关 量控制 、 控控制 和计 算机 控制 . 遥 总控 制框
5自由度康复治疗机械手的设计与仿真
2 2 2 2
= T1 , 2 [ J 1 J 2 J 3 ] M1 M2 M3
T
( 3)
故 Mi ( i ∈ 1 , 2 , 3) 各点在 O2 x 2 y2 z 2 中的坐标为 :
1 1 1
k1 k2 -
= T1 , 2
1
1
1814
上 海 交 通 大 学 学 报 而简化了机构的复杂度和控制难度 .
第 40 卷
在一定程度上有助于患者的康复 , 但是或多或少存 在以下缺点 : 机构复杂 ,整机笨重 ; 造价较高 ,不便移 动 ,难以推广普及 ; 训练动作种类较少 ; 动作幅度较 小 ,且一般限于平面运动 ; 仅限于单个关节的康复治 疗 ,如对手腕和肘部需用 2 个机器人分别治疗 ,无法 进行多关节复合治疗 ; 未利用人体固有关节 , 如肘 部、 膝部等 ,造成构件数增加 , 同时增加了不必要的 质量 . 因此 ,本文从解决以上不足之处出发 , 并在借 鉴现有康复机器人优点的基础上 , 设计了一种新型 可穿戴式康复治疗机械手 , 主要针对前臂模块设计 了新机构 ,使机械手整体更轻便 、 灵活 .
第 11 期
沈 捷 ,等 :5 自由度康复治疗机械手的设计与仿真
u1 v1 v2 v3 w1 w2 w3 k1 k2 k3
1815
β为定值 , 因此 , 找出θ 手 , OE 位置固定 , 故α、 1 和 L2 = Q1 P2 之间的关系即可 .
T1 , 2 =
A1 , 2
R1 , 2
上 海 交 通 大 学 学 报
J OU RNAL O F SHAN GHA I J IAO TON G UN IV ERSIT Y
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
20093802图1装置的各个机械部件手指训练的康复机械手设计梁字辉,周宏甫(华南理工大学,广东广州560140)收稿日期:2008-09-13,协助患者完成指骨三个关节的屈伸运动,且三个关节的运动彼此独立。
;设计文献标识码:A文章编号:1009-9492(2009)02-0084-021概述各种神经肌肉紊乱如中风等导致手部偏瘫功能丧失是很常见的,而手部的屈伸运动又是最经常受损的机动功能,这严重影响了患者的个人自理能力,给社会和家庭造成较大负担。
研究表明除必要的药物介入外,适当的运动训练对患者肢体功能的恢复有很大的辅助作用[1]。
机器人装置被引入以协助患者完成运动训练。
康复机器人是工业机器人和医用机器人的结合,最终目标是恢复人体肌体组织的运动功能,实现肌体组织的自然化动作[2]。
从功能上可分为康复训练机器人和辅助型康复机器人,康复训练机器人的主要功能是帮助患者完成各种运动功能恢复训练,如手臂运动训练、行走训练、脊椎训练运动等。
康复机器人技术在欧美国家得到普遍重视[4]。
本文针对手部偏瘫患者设计了一种手部辅助训练装置协助患者完成指骨的屈伸运动。
该装置由电机驱动,可使指骨的三个关节各自独立运动。
2外骨胳康复机械手的体系结构该康复机械手由三个彼此独立的装置组成,三个部分设计基本相同,独立完成指骨一个关节的屈伸运动。
每一部分主要由一对相互啮合的齿轮及其它附属零部件组成。
整个装置的各个组成部分如图1所示。
小齿轮由一个微型主流电机带动,利用齿轮的啮合运动带动大齿轮,大齿轮后方附有一连接臂随大齿轮一起作圆周运动。
连接臂的另一端焊接在一对金属夹棒上,金属加持棒紧贴手指关节末端的上下两侧。
正是加持棒随大齿轮的圆周运动实现手指关节的屈伸运动,电机的正反转动完成手指的屈伸运动,整个装置的装配图如图2所示,为组装后的完整装置。
3外骨胳康复机械手的外骨胳设计整个装置由三个相互独立的关节组成,实现整个手指的屈伸运动。
如图3所示。
图2单个完整装置研究与开发200938024一个手指的运动仿真设定三台电机的工作参数相同,三个关节的协同运动可以实现整个手指的屈伸运动,图4~6是截取了手指关节协同运动下手指的三个不同位置以展示整个装置协同动作的效果,可见足以顺利完成手指的屈伸,协助病人完成相应的康复训练,达到预期的效果。
5总结本文针对手部偏瘫患者设计了一款手部运动康复装置,实现手指关节的屈伸运动,设计紧凑小巧,各环节相互独立,且多数零部件为标准件,既给不同患者较大的选择空间,满足不同患者的需要,同时易于实现大批量生产,且造价低廉,前景广阔。
参考文献:[1]S.C.Jacobsen ,J.E.Wood ,D.F.Knutti ,K.B.Biggers.TheUtah /MIT dexterous hand :work in progress [J ].The Inter-national Journal of Robotics Research ,1984,3(4):21-50.[2]Michael Leo Turner.Programming Dexterous Manipulation byDemonstration [D ].USA :Stanford University ,2001.[3]P.Rea ,G.Figliolini.Synthesis and optimization of an under-actuated finger mechanism [C ].9th SYROM International Symposium onTheoryofMachinesandMechanisms ,Bucharest ,Romania ,2005.[4]Jacobsen SC ,Ko H ,Iversen EK ,Davis CC.Control Strate-gies for Tendon -Driven Manipulators [J ].Control Systems Magazine ,1990,10(2):23-28.[5]Chang ,S.L.,Lee ,J.J.,Yen ,H.C..Kinematic and Compli-ance Analysis for Tendon -Driven Robotic Mechanisms with Flexible Tendons [J ].Mechanism and Machine Theory ,2005(40):728-739.[6]T.Laliberte ,C.M.Gosselin.Simulation and Design of Underac-tuated Mechanical Hands [J ].Mechanism and MachineTheory ,1998,33(1):39-57.[7]P.Richard ,G.Burdea ,G.Birebent ,D.Gomez ,N.Lan-grana ,and P.Coiffet.Effect of Frame Rate and Force Feed-back on Virtual Object Manipulation [J ].Presence-Teleop-eration and Virtual Environment ,1996,5(1):l-14.[8]Mourad Bouzit ,George V.Popescu ,Grigore C.Burdea ,Rares F.Boian.The Rutgers Master II-ND Force FeedbackGlove [A ].Symposium on Haptic Interfaces for Virtual En-vironment and Teleoperator Systems [C ].2002.第一作者简介:梁字辉,男,1984年生,河北河间人,硕士研究生。
研究领域:机械制造及自动化。
(编辑:向飞)图3手指装配图图5屈伸运动位置二图4屈伸运动位置一图6屈伸运动位置三研究与开发Abstracts 09-02-09-02-09-02-09-02-09-02-09-02-09-02-09-02-09-02-8The General Method of Transforming the Old-style Machine Tool by PLC84An Actuated Finger Exoskeleton Design for Hand Rehabilitation86Research of Online Detection System for Asynchronous Motors89The Construction of Optical Fiber Composite Overhead Ground Wire92Analysis of Crack in Boiler Desuperheater Component96Improvement and Analysis on Control Loop of HLD46-WJ-71Hydraulic Turbine98The Improvement of LED Flashlight Spot100The CNC Transformation of X52Vertical Milling Machine103The Ways of Removing the Induced Voltage in the Alternating Controlloop1ZHAN Wen-binAbstract:Key words:LIANG Zi-hui,ZHOU Hong-fuAbstract:Key words:GUO Jun-bo,WANG Feng-tao,WANG Liang Abstract:Key words:JIA Kai-zhouAbstract:Key words:HONG Wen-jian,HU Hua-shengAbstract:Key words:LI Xin-bao,ZHOU Wen-qiang,ZHANG Dian-dong,WEN Xi-huaAbstract:Key words:DING Cai-pingAbstract:Key words:ZHANG Yi,LOU Jian-yongAbstract:Key words:AN Jiang-bo,YUAN Zhi-qiang,ZHAI Xiao-ming Abstract:Key words:By the example of the transforming of T617 horizontal machine tool,this paper introduces in details about the method of transforming the old-style relay electrical machine tool by PLC and the problems which must be paid attention to in the transformation.PLC;transform;machine tool;electric control systemChronic hand impairment is common following stroke or other diseases,studies show that mass practice of movement is useful to healing.In this paper,a kind of hand rehabilitation for patients with hemiplgia is designed,which can help patients to complete the flexion and extension of the three joints of the index finger,each of the three joints can actuate independently. The device is driven by the micro-motor,and gear is used to achieve the finger’s flexion and extension.reha-robot;finger exoskeleton device;designThis paper describes the principle and the significance of detecting the fault of three phase asynchronous motors,the scheme for the fault detecting is discussed,then the online detecting system based on DAQ card is designed.This system can acquire and process the signals and has a high measuring precision,the demands for detecting motor fault is achieved.asynchronous motors;fault detecting;DAQ cardThis paper mainly introduces the experience of the construction of optical fiber composite overhead ground wire (OPGW),based on the practice,the problems that must be paid attention to in the construction are put forward.OPGW;erecting;tight cable;test;constructionBy observation and analyzing of the failure parts of desuperheater water pipe,the crack and deformation reason is found.The test shows that the excessive thermal stress led to this problem.desuperheater;water pipe;thermal stress;crackThe control loop plays a very important role in the hydraulic turbine distributor.But it has the problems of multiprocessing positions,high manufacturing costs and inconvenient installation and debugging.In view of this situation, two special gate arms are designed instead of using the control loop in the distributor.The operation practice in some hydropower station shows that this method not only simplifies the manufacturing process,but also reduces the manufacturing costs and mechanical faults of the equipment.small hydropower;hydraulic turbine;control loop; design;improvementBecause of the merits of low price,long life-span, small heat rate and stable function,the LED illuminating flashlight is applied broadly,but the utilization rate of illumination intensity is not high.By analyzed the problem in practice,this paper puts forward an improve scheme,and get a good result.LED flashlight;illuminate;spot;effectThis article introduces the technic preparation and vertical lifts milling machine CNC transformation.equipment reconstruction of the The transformation methods the mechanical system,electrical system and the NC system are described in detail.vertical milling machine lifts;NC transformation; technology transformation programmeIn the modern factory,because of increasing of the automation degree,most equipments need centralization of control,the control cable is long,so the induced voltage in the cable will generate easier.This paper takes a contactor fault treatment as an example,analyzes the generation reason of the induced voltage,and gives the methods to eliminate it.induced voltage;cable capacitance;contactor;coil12123 1(Yuedong Senior Technical Schools,Shantou515041, China)(South China University of Technology,Guangzhou560140,China)(Research Institute of Vibration Engineering,Dalian University of Technology, Dalian116024,China)(Xinjiang Huitong Water Conservancy and Electric Power Engineering Construction Co.,Ltd.,UrumQi830000,China)(1.Guangzhou Special Pressure Equipment Inspection and Research Institute,Guangzhou510050,China;2.Guangdong Special Equipment Inspection Institute,Guangzhou 510655,China)(1.Department of Environmental Engineering,North China Institute of Water Conservancy and Hydroelectric Power,Zhengzhou 450011,China;2.Xichuan Management in Stork River Irrigation Area, Nanyang474450,China;3.Xichuan Electric Power Bureau,Nanyang 474450,China)(Guangdong Province Senior Technical School, Boluo516100,China)(1.Zhejiang University of Technology, Hangzhou310000,China; 2.Shangyu vocational education center, Shangyu312300,China)(Henan Zhongyuan Dahua Group Co.,Ltd.,Puyang457004,China)。