(完整word版)20T焊接变位机的设计与分析要点
焊接变位机械设计研究
焊接变位机械设计研究焊接变位机械是一种可以帮助焊接过程中工件进行旋转和翻转的设备,它在焊接工艺中具有非常重要的作用。
在焊接自动化过程中,焊接变位机械能够提高焊接效率和质量,减少人力成本和操作风险。
对焊接变位机械的设计和研究具有重要的实际意义。
一、焊接变位机械的类型及其应用1. 类型焊接变位机械根据其结构和工作方式的不同,可以分为旋转式焊接变位机和翻转式焊接变位机两种类型。
旋转式焊接变位机是指通过电机驱动旋转轴,使工件进行旋转的装置。
在焊接过程中,采用旋转式焊接变位机可以使工件保持稳定的旋转速度和角度,从而实现对工件全方位的焊接。
2. 应用焊接变位机械主要用于大型工件焊接过程中的旋转和翻转操作。
在船舶、桥梁、石油化工、风电等领域,需要对大型金属构件进行焊接时,通常就需要使用焊接变位机械来实现对工件的旋转和翻转。
焊接变位机械也可以应用于钢结构、船舶、桥梁等工程机械的生产制造环节。
二、焊接变位机械设计研究现状分析目前,国内外关于焊接变位机械设计研究已经取得了一系列的成果,但与焊接自动化设备的整体发展相比,焊接变位机械的设计研究尚处于起步阶段,存在一些问题和不足。
1. 技术水平不高目前国内焊接变位机械的设计水平相对较低,主要体现在设备的控制精度、稳定性和可靠性方面。
大多数焊接变位机械还停留在传统机械传动和液压控制的阶段,缺乏现代化的电气控制技术和自动化控制系统。
2. 缺乏标准化设计国内焊接变位机械的设计缺乏统一的标准和规范,导致了产品质量参差不齐,生产效率低下,难以满足用户的实际需求。
由于缺乏标准化设计,焊接变位机械的产品结构和性能参数存在较大的差异。
3. 创新能力不足国内焊接变位机械制造企业创新能力不足,缺乏对焊接变位机械的核心技术和关键零部件的研发能力。
目前,市场上主要以进口设备为主,国内产品在技术含量和产品性能上存在明显的差距。
为了提高焊接变位机械的设计水平和产品质量,需要针对关键技术进行深入研究和探讨。
焊接变位机的设计(全套图纸)
本次设计是以焊接变位机作为主要的研究对象。
在焊接变位机中采用全液压系统,使之重量减轻,自动化程度增强,变位机中的传动部分是由一个油泵机组分别驱动油马达和三组油缸带动工作台进行回转和倾斜,并使主,副臂产生俯仰动作调节工作台的高低。
本次设计对焊接变位机的传动机构的特点和组成都做了详细的介绍,对机构中的主要零部件做了具体的设计。
本次设计采取了独特的设计,使得产品更为先进、实用,设计后制造出来的焊接变位机主要应用在焊接行业上,这样可以缩短焊接辅助时间,提高工人的劳动生产率,减轻工人劳动强度,改善焊接质量,并充分发挥各种焊接方法的效能。
在焊接生产中,经常会遇到焊接变位以及选择合适的焊接位置的情况,针对这一实际需要,我们设计的焊接变位机,它可通过工作台的回转和倾斜,使焊缝处于易焊位置。
焊接变位机与焊接操作机配合使用,可实现焊接的机械化、自动化,提高了焊接的效率和焊接质量。
焊接变位机可应用于化工、锅炉、压力容器、电机电器、铁路交通、冶金等工业部门的自动焊接系统。
关键词:焊接变位机;液压系统;回转;倾斜;The design is subject to weld change site equipment .The weld change site equipment,which the hydraulic system been used to lighten its weight and achieve highly automatically. The transmission part of the equipment is powered by one group of oil pump,several hydraulic motor and three hydrocylinder drive the work table to achieve rotation, incline and vice-arm to adjust work table height. The detailed system feature and components have been introduced in this design to emphasis the cutting edge and reality feature, which been enhanced by the specialty design of its major component. Weld change site equipment is mainly for welding industry to reduce the welds the assistance period, enhance work efficiency, reduce utility of labour and improve quality of welding. Most importantly, weld change site equipment could enhance the effect of almost every sort of welding。
台式焊接变位机设计说明书
台式焊接变位机设计说明书第一章焊接变位机械性能及结构1.1 焊接变位机械概述焊接变位机械是改变焊件、焊机或焊工位置来完成机械化、自动化焊接的各种机械装置。
焊接变位机械可分为三大类:(1)焊件变位机械:包括焊接变位机、焊接滚轮架、焊接回转台和焊接翻转机。
(2)焊机变位机械:包括焊接操作机和电渣焊立架。
(3)焊工变位机械:包括焊工升降机等。
焊接变位机(positioner)是将工件回转、倾斜,使工件上的焊缝置于有利施焊位置的焊件变位机械。
它主要用于机架、机座、法兰、封头等非长形工件的翻转变位和焊接,也可用于装配、切割、检验等。
焊接滚轮架(turning rolls)是借助主动滚轮与工件之间的摩擦力带动筒形工件旋转的焊件变位机械。
它主要用于筒形工件的装配与焊接,是锅炉容器生产中的常用工艺装备。
焊接回转台(welding turntable)是一种简化的变位机,它将工件绕垂直轴回转或者固定某一角度倾斜回转,主要用于回转体工件的焊接、堆焊与切割。
焊接翻转机(welding tilter)是将工件绕水平轴转动或倾斜,使之处于有利装焊位置的焊件变位机。
它主要适用于梁柱、框架、椭圆容器等的焊接。
焊接操作机(manipulator)的作用是将焊机机头准确地送到并保持在待焊位置,或以选定的焊接速度沿规定的轨迹移动焊机机头。
焊接操作机与变位机、滚轮架等配合使用,可完成纵缝、环缝、螺旋缝的焊接,还可以用于自动堆焊、切割、探伤、打磨、喷漆等作业。
1.2 焊接变位机械具有的性能1)焊件变位机械和焊机变位机械要有较宽的调速范围,稳定的焊接运行速度,以及良好的结构刚度。
2)对尺寸和形状各异的焊件,要有一定的适用性。
3)在传动链中,应具有一级反行程自锁传动,以免动力源突然切断时,焊件因重力作用而发生事故。
4)与焊接机器人和精密焊接作业配合使用的焊件变位机械,视焊件大小和工艺方法的不同,其到位精度(点位控制)和运行轨迹精度(轮廓控制)应控制在0.1~2mm之间,最高精度应可达0.01mm。
焊接变位机械讲义

焊 接 专 机
环缝焊接专机
环缝焊接系统主要用于 不同材质、不同尺寸和形状 工件的环缝焊接,以提供高 质量的焊缝、减少焊接变形。 焊接接头有不同的形状,包 括对接、角接、搭接、琐底 等接头形式。外部焊接方式 通常的焊接机头处在工件的 顶部,内部焊接需要加其他 装置。 单道和多道GTAW(钨 级氩弧焊)、PAW(等离子 焊)、GMAW(熔化极氩弧 焊)、FCAW(药芯式熔化 极弧焊)、SAW(埋弧焊)、 YAG激光焊接等焊接方法都 可以在焊接机床上实现。作 为选项,焊接机床上可以同 时安装两个以上的焊枪,并 同时进行焊接。
龙门式自动焊接机(中间控制)
按结构设计形式分为: 焊 工 变 位 机 焊 接 变 位 机 械 焊 件 变 位 机 焊 机 变 位 机
焊工升降台
单座
立式 (固定式、可调式、倾斜式) 卧式(固定式、升降式) 机架固定(固定式、升降式)
单回转式
双座
机架移动(固定式、升降式)
自调式、组合式、履带式
多座(滚轮架)
思考:焊件变位机械和焊机 变位机械怎样组合使用?
纵缝焊接专机
纵缝焊机设计采用琴键压紧式机构,提供 均匀稳定的工件夹持和冷却效果,大梁和 焊接小车提供精密的焊接动作,用于进行 高质量、低变形的直线性焊缝的焊接应用。 工件的形式、形状和材质可以不同,大多 数情况下,焊缝是对接接头设计。针对不 同的应用,纵缝焊接系统可以集成的焊接 方式有:GTAW(钨级氩弧焊);PAW (等离子焊);GMAW(熔化极氩弧焊); FCAW(药芯式熔化极弧焊);SAW(埋 弧焊);YAG激光焊接等。 不同焊缝背面保护衬套和成行槽,焊缝 可以被100%焊透,并保证单面焊双面成 型。 焊接焊接专机分为: 外纵缝焊接系统 内缝、纵缝焊接系统 内外组合式纵缝焊接系统 平板拼接纵缝焊接系统 升降式纵缝焊接系统 精密纵缝焊接系统 桌面型焊接系统 自动纵缝焊接系统 立式纵缝焊接系统
焊接变位机课程设计报告
目录1.设计方案确定……………………………………………………………………………………1.1设计要求、技术要求……………………………………………………………………….1.2回转机构的确定…………………………………………………………………………….1.3倾斜机构的确定…………………………………………………………………………….1.4机构预期寿命估算………………………………………………………………………….2.回转机构设计……………………………………………………………………………………2.1回转轴强度计算…………………………………………………………………………….2.2根据回转轴直径及受力情况选择轴承…………………………………………………….2.3设计回转轴结构尺寸、选择键…………………………………………………………….2.4回转机构驱动功率计算及电机选择……………………………………………………….2.5设计回转轴减速机构……………………………………………………………………….2.6回转主轴受力分析及校核,轴承校核…………………………………………………….3.倾斜机构设计. …………………………………………………………………………………3.1方案确定… ………………………………………………………………………………3.2最大倾斜力矩计算… ……………………………………………………………………3.3V带传动…… ………………………………………………………………………………3.4涡轮蜗杆传动………………………………………………………………………………3.5扇形齿轮机构………………………………………………………………………………3.6倾斜轴及轴承设计…………………………………………………………………………4.总结… ………………………………………………………………………………………......参考文献1.设计方案确定图1-11.1设计要求、技术要求表1-1设计要求、技术要求工作台回转工作台倾斜载重量回转速度倾斜速度工作台尺寸重心高度偏心距工作台倾斜角度电机驱动电机驱动660Kg 0-1r/min 0-1r/min φ700mm340mm 200mm 0-135°1.2回转机构的确定由于工作台回转速度低,调速范围长,额定功率低,所以选择直流电动机;因为总传动比较大,故可选择外购一个减速器及涡轮蜗杆机构,选用一级齿轮。
焊接变位器设计指导书
座式焊接变位器设计1.焊接变位机械的分类及应用焊接变位机械是改变焊件、焊机或焊工空间位置来完成机械化、自动化焊接的各种机械设备。
根据焊接变位机械的作用可以分成三大类:1) 焊件变位机械,如焊接变位机、滚轮架、回转台、翻转机;2) 焊机变位机械,焊接操作机;3) 焊工变位机械,焊工升降台。
使用焊接变位机械可缩短焊接辅助时间,提高劳动生产率,减轻工人劳动强度,保证和改善焊接质量,并可充分发挥各种焊接方法的效能。
2.焊接变位机作用焊接变位机是焊件变位机械中的一种,利用它在焊接作业中将焊件回转并倾斜,使焊接上的焊缝置于有利施焊位置,完成手工焊接和自动焊接的作业。
焊接变位机主要用于机架、机座、法兰、封头等非长形焊件的翻转变位。
在手工焊中,焊接变位机可以把工件回转并倾斜,使焊缝处于水平焊或船形焊位置,从而减轻工人劳动强度,保证焊接质量;也可以利用焊接变位机进行自动焊接操作,完成一些圆环焊缝的焊接;另外,可以把焊接变位机与弧焊机器人相结合(柔性加工单元FMC ),完成一些曲面、复杂的焊缝的焊接。
焊接变位机按结构形式可分为三种:1) 伸臂式焊接变位机;2) 座式焊接变位机;3) 双座式焊接变位机。
焊接变位机出三种基本结构形式外,还有很多派生形式,有些变位机的工作台还具有升降功能。
3.焊接变位器方案确定焊接变位器作为焊件变位机械中的一种,其工作台的旋转速度按设计任务书为0~1r/min ,满足不同圆环焊缝工件自动焊时对焊接速度调节的要求,以及手工焊接时对工作台上工件焊接位置调整的需要;工作台倾斜的目的是使其上的工件在合理的焊接位置施焊,速度可以设计为定值在0.5~1.0r/min 之间选取,以保证调节速度和定位精度。
焊接变位器工作台的回转运动由电机驱动,倾斜运动可由电机驱动或人工驱动。
工作台在倾斜机构采用电机驱动时倾斜速度为定值,可以由三相异步电机驱动,考虑交流电机的转速为1000 3000r/min ,倾斜机构的总传动比达到2000~6000,应采用多级减速机构,可以考虑三级减速机构,包括一级外购减速器、一级蜗轮蜗杆减速器,一级齿轮减速器。
焊接变位机资料
.1 关于焊接变位机的几个概念和大体的要求焊接变位机的概念在焊接进程中,咱们常常会碰到焊接变位和选择适合的焊接位置的情形,为了解决这一问题,焊接变位机也就理所应当的显现了。
它能够通过工作台的回转和翻转,使待焊处置于适合位置,专门好的和焊接设备结合利用,实现焊接的自动化,机械化,提高生产效率和焊接质量。
归纳来讲,焊接变位机确实是移动工件,使之待焊部位处以适合易焊接的位置的焊接辅助设备。
选择适合的焊接变位性能提高焊接质量及生产效率,降低工人的劳动强度及生产本钱,增强平安文明生产,有利于现场治理。
专门是入世的冲击,工程机械市场竞争将会愈来愈猛烈,国内企业必需适应形势,通过焊接变位机等基础设备投入达到生产能力的革命。
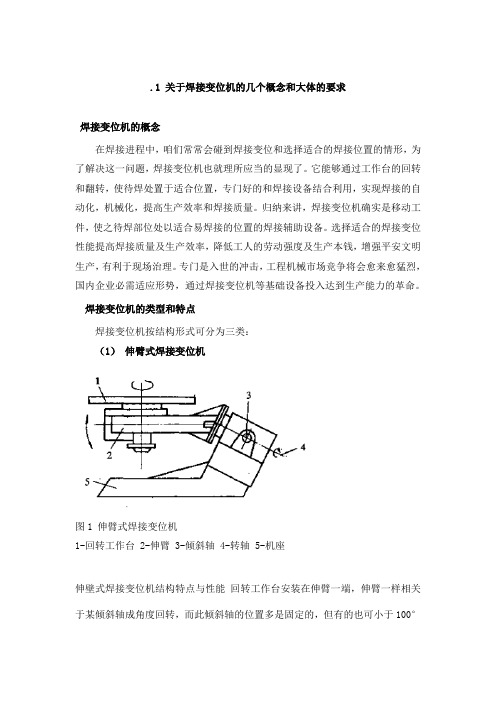
焊接变位机的类型和特点焊接变位机按结构形式可分为三类:(1)伸臂式焊接变位机图1 伸臂式焊接变位机1-回转工作台 2-伸臂 3-倾斜轴 4-转轴 5-机座伸壁式焊接变位机结构特点与性能回转工作台安装在伸臂一端,伸臂一样相关于某倾斜轴成角度回转,而此倾斜轴的位置多是固定的,但有的也可小于100°的范围内上下倾斜。
该机变位范围大,作业适应性好,但整体稳固性差。
其适用范围为1t以下中小工件的翻转变位。
在手工焊中应用较多。
多为电动机驱动,承载能力在0.5t以下,适用于小型罕有的翻转变位。
也有液压驱动的,承载能力多,适用于结构尺寸不大,但自重较大的焊件。
伸臂式的焊接变位机在手工焊中应用较多。
(2)座式焊接变位机图2 座式焊接变位机1-回转工作台 2-倾斜轴 3-扇形齿轮 4-机座座式焊接变位机工作台有一个整体翻转的自由度。
能够将工作翻转到理想的焊接位置进行焊接。
另外工作台还有一个旋转的自由度。
该种变位机已经系列化生产,要紧用于一些管,盘的焊接。
工作台边同回转机构支承在两边的倾斜轴上,工作台以焊速回转,倾斜边通过扇形齿轮或液压油缸,多在140°的范围内恒速倾斜。
该机稳固性好,一样不用固定在地地基上,搬移方便。
QD型20t双梁桥式起重机主要技术要点及主梁工艺
ZQB 001-2015QD20/5t 双梁桥式起重机整机技术要点及主梁主要工艺措施编制:审核:批准:日期:目录主要技术要点 (1)一、大车主梁制作技术要点 (1)二、大车端梁制作技术要点 (6)三、小车架制作技术要点 (6)主梁主要工艺方法 (8)一、主梁下料工艺措施 (8)1.1、腹板下料 (8)1.2上下盖板下料 (10)1.3大小筋板下料 (11)二、Ⅱ型梁装配 (11)三、Ⅱ型梁里皮焊接 (13)四、装配下盖板 (15)五、主梁头部焊接及修理 (16)六、主梁腰缝焊接 (17)七、主梁的修理与检验 (18)附表: (20)主要技术要点一、大车主梁制作技术要点1、主梁焊接完毕,应有0.9-1.4 L /1000的上拱度F,最大拱度在跨中S/10范围内。
2、主梁水平方向产生的弯曲:L/1000≤f ≤L/2000。
只能向走台侧弯曲,不得有S弯。
3、主梁腹板局部翘曲(波浪度):以1m平尺检测,离上翼缘板H/3以内不应大于0.7t,其余区域不应大于1.2t。
4、箱型主梁上翼缘板的水平偏斜值C≤B/200,此值应在大肋板或节点处测量。
5、箱型梁腹板的垂直偏斜值h≤H/200,此值应在大肋板或节点处测量。
6、主梁上盖板波浪度,t>10时,每米用平尺测量≤4。
7、小车轨道一般宜用整根钢轨(将接头焊为一体),钢轨接头应满足以下要求:a)垂直、水平错位值Hf≤1mm,应将错位处以1:50的斜度磨平。
b)连接处钢轨顶部在水平面内的直线度b,在任意2m测量范围内b 不应大于1mm。
c)小车钢轨上任一点处,轨道中心相对于梁腹板中心的位置偏移量K ≤0.5d)两端最短一段钢轨长度:不应小于1.5m,并在两端加施焊挡铁。
e)小车轨道接头处头部间隙:≤2mm。
f)小车轨道水平弯曲:S>19.5时,≤4mm。
且只能向走台侧弯曲。
g)小车轨距:跨端±2mm,跨中S>19.5m时,+7。
+18、同一台两根主梁高低差:≤2mm,小车轨道高低差E≤2mm。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录第一章绪论 (3)1.1选题背景 (3)1。
2研究的目的和意义 (3)1.3国内外研究综述 (4)第二章焊接变位机的主要性能及结构 (4)2。
1一般焊接设备应具备的性能 (5)2.2焊接变位机的分类 (5)2。
3焊接变位机的主要结构及工作原理 (7)2。
4焊接变位机的选用原则 (8)第三章焊接变位机的方案设计 (9)3。
1焊接变为机的整体方案设计 (9)3。
2 翻转机构设计 (11)3。
2。
1第一级蜗杆的设计 (11)3.2。
2第二级蜗轮的设计蜗杆 (15)第四章校核 (20)4。
1各轴转速 (20)4。
2各轴的功率 (21)4。
3 各轴的转矩 (21)4.4 齿轮的校核 (21)4。
5 轴的校核 (25)4.6小齿轮轴承的校核 (26)第五章控制部分 (28)5。
1 控制部分电气原理图 (28)5.2回转机构的控制部分 (28)5.3翻转电机的控制 (29)致谢 (30)参考文献 (31)第一章绪论1.1选题背景焊接技术自发明至今已有百余年的历史,工业生产中的一切重要产品,如航空、航天及核能工业中产品的生产制造都离不开焊接工艺,并且焊接质量的好坏直接影响产品质量的好坏以及整机性能.所以改进焊接技术,提高焊接质量对现代化工业有着重要的作用,其中提高焊接机械化、自动化水平,实现焊接工艺及装备的现代化是改进焊接质量的一个重要方面。
一般来说,当焊件的质量较大或体积较大时,靠人工改变焊缝位置很不容易,且效率低下,在这样的焊接生产中,就会遇到焊接变位及选择合适的焊接位置的情况,针对这一实际需要,人们就设计制造了焊接变位机。
合适的变位机能将被焊工件的焊缝转动到最佳位置,从而提高焊接质量及生产效率,更避免了立焊、仰焊等情况出现。
变位机可以使工件上的接缝处于理想的船形位置或平焊位置,以方便进行焊接,是提高焊接效率和质量,降低劳动强度的有效工具。
另外,选择合适的变位机能降低工人的劳动强度以及生产成本,加强安全文明生产,有利于现场管理.到如今,焊接变位机不仅仅是一种焊接辅助设备,它更是与与焊接操作机、焊接滚轮架并称为焊接辅助设备中三大机。
1。
2研究的目的和意义自从焊接技术发明以来,它便在机械制造工业当中占据着其不可替代的地位,工业生产中的绝大多数重要产品,如汽车、船舶、飞机等等产品的生产制造都离不开焊接技术。
焊接质量的高低会直接影响产品的整体质量。
所以,改进焊接技术,提高焊接质量对工业现代化起着重要的作用。
而焊接变位机正是这样一个可以提高焊接工艺水平的关键焊接设备。
一般而言,对于加工比较复杂并且质量较重的工件我们很难人为的去改变工件的焊缝位置.在这个时候焊机变位机就显示了它的优越性,通过对工件的翻转与回转,焊接变位机可以将被焊工件的各类焊缝调整到最佳位置,从而避免仰焊、立焊等的出现,提高焊接加工质量。
在现如今的制造业当中焊接机器人的运用越来越广泛,未来能够充分发挥机器人的高能力,我们经常将机器人与焊接变位机组合使用。
焊接变位机已经成为了焊接机器人工作站不可缺少的一部分,因此我对焊机变位机的研究是有很大现实意义的.总之,焊接变位机是保证焊接效率和质量,提高焊接生产率,降低劳动强度,改善工人作业条件,实现机械化、自动化的的有效设备.另外,焊接变位机也能及生产成本,加强安全文明生产,有利于现场管理。
目前,我国的焊接变位机行业已经开始起步,但是与世界一流水平还有一定的差距。
所以,就焊接变位机的重要性和我国目前焊接变位机的现状来说,对焊接变位机的研究具有重大意义。
1。
3国内外研究综述我国的焊接变位机起步较晚,目前处于研究开发阶段,但是在最近的十几年里也取得了巨大的成就。
焊接变位机在我国工程机械行业,有了较大的发展,获得了广泛的应用.就型式系列和品种规格而言,已问世的,约有十余个系列,百余品种规格,正在形成一个小行业。
焊接变位机按机构形式可分为三类:伸臂式焊机变位机、座式焊机变位机、双座式焊机变位机。
在国际领域,各种各样的焊接变位机的产品有百余种。
从技术角度来看,有普通型的,有无隙传动伺服控制型的。
焊接变位机的额定负荷范围也从0。
1KN至18000KN应有尽有.可以这么说,焊接变位机是一个品种多,拥有较高技术水平,产品型号齐全的产品.国外在焊接变位机领域比较著名的公司有德国Severt公司、美国Aroson公司、德国CLOOS公司、日本松下公司。
这些公司大多生产伺服控制与机器人配套的焊接变位机,这些变位机最大的优点就是精准的数字控制,这使得工件的焊接加工位置变得绝对可控,从而大大提高了加工质量,减少了施焊时间,改善了操作工人的工作条件.第二章焊接变位机的主要性能及结构焊接变位机,是在焊接作业中,将焊件回转并倾斜,使焊件上的焊缝置于有利于施焊的位置的焊件变位机械.焊接变位机主要用于机架、机座、机壳、封头等非长型焊件的翻转变位,同时还可用于装配、切割、检验、打磨、喷漆等作业。
焊接变位机主要实现工作台的正反回转,并可无级调速,在最大承载条件下保持其回转速度的波动不超过5%。
变位机能自动倾斜工作台而不抖动、倾覆,并有限位、自锁功能,并且其回转速度无级调速,变速范围大,调速精度高。
2。
1一般焊接设备应具备的性能1)焊件、焊机变位设备要具有较宽的调速范围,稳定的焊接运行速度以及良好的结构刚度。
2)对不同尺寸、不同形状的焊件要有一定的适用范围.3)传动链中,应具备一级反行程自锁传动,以避免动力源突然切断.4)与焊接机器人和精密焊接配合的焊件变位设备,其到位精度(点位控制)和运行轨迹精度(轨迹控制)应视焊件大小、工艺方法控制在0。
1~3mm,最高达到0。
01mm。
5)回程速度要快,但应避免产生冲击和振动。
6)良好的接电、接水、接气设施以及导热和通风性能。
7)整体结构要有良好的密封性,以避免焊接飞溅的损伤,对散落其上的焊渣,药皮等脏物应易清除。
8)焊接变位设备要有联动控制接口和相应的自保护性能,以利于集中控制,相互协调动作。
9)各种焊件变位设备的工作台面上,应刻有安装基线并设有安装槽孔,能方便的安装各种定位器件和夹紧机构。
10)当用于装配的场合时,其工作面要有较高的强度和抗冲击性能。
11)当用于电子束、等离子、激光、钎焊场合时,应注意导电、隔磁、绝缘等方面的特殊要求.2.2焊接变位机的分类焊接变位机的基本结构形式有伸臂式、座式、双座式三种,其特点、性能、适用范围各不相同。
力矩大大减少。
因此,重型变位机多采用这种结构.2。
3焊接变位机的主要结构及工作原理焊接变位机的基本结构形式虽然有上述三种,但其派生形式很多,有的变位机的工作台还具有升降的功能。
通用的座式焊接变位机的主要结构如图所示。
变位机主要有机架、驱动机构(包括翻转减速机构和旋转减速机构)、回转盘、导电机构及控制系统组成。
(1)机架变位机架主要包括机座、工作台支架等.这些构件均采用型材焊接而成.(2)驱动机构变位机工作台的翻转减速运动采用交流电机经二级蜗杆减速器驱动,通过齿轮传动实现,使其具有自锁功能,且翻转力矩大,定位可靠。
工作台的回转驱动机构,有交流电机、回转支撑、回转齿轮等组成,交流电机通过变频调速器,实现无级调速,变速范围大,调速精度高。
(3)导电机构变位机都应设有导电装置,以避免焊接电流通过轴承、齿轮等传动部件。
导电装置的电阻通常不超过1mΩ,其容量应满足焊接电流的要求.(4)控制系统变位机的控制部分设有供自动焊接用的联动接口。
工作台的起动、停止、旋转均在控制盒上实现远程操作.变位机的电器控制由旋转电机及翻转电机控制部分组成。
2.4焊接变位机的选用原则从使用的经济性、时效性出发,应注意以下几点:1)焊件的重量、焊件在工作台上的重心距、偏心距应在变位机的载重图或承载表的数据范围内,并有一定的裕量。
2)若变位机是用来焊接环焊缝时,应根据焊件的坡口的回转半径和焊接速度换算出工作台的回转速度,该速度应在变位机的调速范围内。
另外,要注意工作台的回转平稳性是否能够满足工艺的要求。
3)若焊件外轮廓尺寸很大,则需要考虑工作台倾斜时,倾斜角度是否满足使焊件处于最佳焊接位置的要求;在此倾斜角下是个会出现焊件与地面接触的现象,若出现此现象,那么除选用工作台离地面间隙更大的变位机外,还可以采用增加基础高度或设置地坑的办法来解决.4)变位机上若需要安装气动、电磁夹具以及水冷设施时,应向生产厂家提出接气、接电、接水的要求。
5)变位机的需用焊接电流应大于焊件施焊工艺所要求的最大焊接电流。
第三章焊接变位机的方案设计3。
1焊接变为机的整体方案设计焊接变位机是改变焊件、焊机或焊工位置来完成机械化、自动化焊接的机械装置.使用焊接变位机可缩短辅助焊接时间,提高劳动生存率,减轻工人劳动强度,改善焊接质量,并可充分发挥各种焊接方法的效能.本焊接变位机由工作台、回转机构、翻转机构、机座、控制装置、电动机和焊接导电装置组成。
工作台用于工件的停放和固定。
在工作台面上开沟槽,表面刻有定位基线,用于工件的固定和定位。
回转机构用于实现工作台的回转,不同的焊件合适的施焊速度不同,这可以通过控制变频器实现回转机构的无级调速使个工作台得到所需的回转速度。
翻转机构由电动机经减速器,齿轮传动实现倾斜,安装有位置行程开关精确控制焊件的倾斜角度,使工件到达最有利于施焊的位置。
机座用于支撑其他部件.电动机提供动力。
减速器用于减速,这是由于电动机转速太高,而回转与倾斜转速要很低。
3.2 翻转机构设计如图所示,通过电动机经过减速器再经过二级齿轮传动实现工作台的倾斜.翻转电动机参数如下表型号功率效率转速频率额定电压YEJ-160M11kw0。
88146050Hz380V3.2。
1第一级蜗杆的设计由于需要一级蜗轮蜗杆具有自锁功能,所以取传动比为62已知:电动机功率p=11kw,电动机效率0。
88,蜗杆转速1460r/min,传动比i=62,工作载荷稳定,工作15年,一班制。
1.选择蜗杆传动类型采用渐开线蜗杆 2. 选择材料考虑到蜗杆传动效率不大,速度只是中等,故蜗杆用45钢;因希望效率高些,耐磨性好些,故蜗杆螺旋齿面要求淬火,硬度为45~55HRC 。
蜗轮用铸锡磷青铜ZCuSn10P1,金属模铸造.为了节约贵重的有色金属,仅齿圈用青铜制造,而轮芯用灰铸铁H100制造。
3。
按齿面接触疲劳强度进行设计根据闭式蜗杆传动的设计准则,先按齿面接触疲劳强度进行设计,再校核齿根弯曲疲劳强度。
由工具书查得,传动中心距322][⎪⎭⎫⎝⎛≥HEZ Z KT a σρ(1)确定作用在蜗轮上的转矩T 2 Z1=1,估计效率为0.45,则mmN in P T •=⨯⨯⨯⨯=⨯=8.176656662/146045.088.0111055.9/1055.9612162η(2)确定载荷系数K 查工具书得05.1105.11=⨯⨯==βK K K K VA(3)确定弹性影响系数EZ因选用的是铸锡磷青铜蜗轮和钢蜗杆相配,故21160MPaZ E=(4)确定接触系数ρZ先假设蜗杆分度圆直径d 1和传动中心距的比值35.01=ad,查工具书得9.2=ρZ(5)确定许用接触应力][Hσ可查工具书得MPaH268]'[=σ应力循环次数721009.583001562146016060⨯=⨯⨯⨯⨯⨯==hLjn N寿命系数8159.01009.510877=⨯=HNK则MPa K HHN H 7.2182688159.0]'[][=⨯==σσ(6)计算中心距mmZ Z KT a HE9.2027.2189.21608.176656605.1][32322=⎪⎭⎫ ⎝⎛⨯⨯⨯=⎪⎭⎫⎝⎛≥σρ取中心距,45.0,144,62,1,18,8,62,32021121=========x admm d z z q m i mm a 查工具书得ρρρZ Z Z ≤=',68.2'因此,以上结果可用4. 校核齿根弯曲疲劳σ强度 可知''47'103︒=γ][53.12212FFa FY Y m d d KT σσβ≤=()29.6218.3cos 322==zz v可查得齿形系数28.22=Fa Y螺旋角系数 9773.014018.31=-=φY许用弯曲应力]'[][FFNFK σσ•=可查得MPaF56]'[=σ寿命系数646.01009.510976=⨯=FNKMPaK FFN F 176.3656646.0]'[][=⨯=•=σσ][07.119773.028.284961448.176656605.153.1FFMPa σσ≤=⨯⨯⨯⨯⨯⨯=可知弯曲强度是满足的3。