焊接变位机型式与系列的论述
(完整word版)20T焊接变位机的设计与分析要点
目录第一章绪论 (3)1.1选题背景 (3)1。
2研究的目的和意义 (3)1.3国内外研究综述 (4)第二章焊接变位机的主要性能及结构 (4)2。
1一般焊接设备应具备的性能 (5)2.2焊接变位机的分类 (5)2。
3焊接变位机的主要结构及工作原理 (7)2。
4焊接变位机的选用原则 (8)第三章焊接变位机的方案设计 (9)3。
1焊接变为机的整体方案设计 (9)3。
2 翻转机构设计 (11)3。
2。
1第一级蜗杆的设计 (11)3.2。
2第二级蜗轮的设计蜗杆 (15)第四章校核 (20)4。
1各轴转速 (20)4。
2各轴的功率 (21)4。
3 各轴的转矩 (21)4.4 齿轮的校核 (21)4。
5 轴的校核 (25)4.6小齿轮轴承的校核 (26)第五章控制部分 (28)5。
1 控制部分电气原理图 (28)5.2回转机构的控制部分 (28)5.3翻转电机的控制 (29)致谢 (30)参考文献 (31)第一章绪论1.1选题背景焊接技术自发明至今已有百余年的历史,工业生产中的一切重要产品,如航空、航天及核能工业中产品的生产制造都离不开焊接工艺,并且焊接质量的好坏直接影响产品质量的好坏以及整机性能.所以改进焊接技术,提高焊接质量对现代化工业有着重要的作用,其中提高焊接机械化、自动化水平,实现焊接工艺及装备的现代化是改进焊接质量的一个重要方面。
一般来说,当焊件的质量较大或体积较大时,靠人工改变焊缝位置很不容易,且效率低下,在这样的焊接生产中,就会遇到焊接变位及选择合适的焊接位置的情况,针对这一实际需要,人们就设计制造了焊接变位机。
合适的变位机能将被焊工件的焊缝转动到最佳位置,从而提高焊接质量及生产效率,更避免了立焊、仰焊等情况出现。
变位机可以使工件上的接缝处于理想的船形位置或平焊位置,以方便进行焊接,是提高焊接效率和质量,降低劳动强度的有效工具。
另外,选择合适的变位机能降低工人的劳动强度以及生产成本,加强安全文明生产,有利于现场管理.到如今,焊接变位机不仅仅是一种焊接辅助设备,它更是与与焊接操作机、焊接滚轮架并称为焊接辅助设备中三大机。
手工电弧焊常用焊机的分类构造与原理
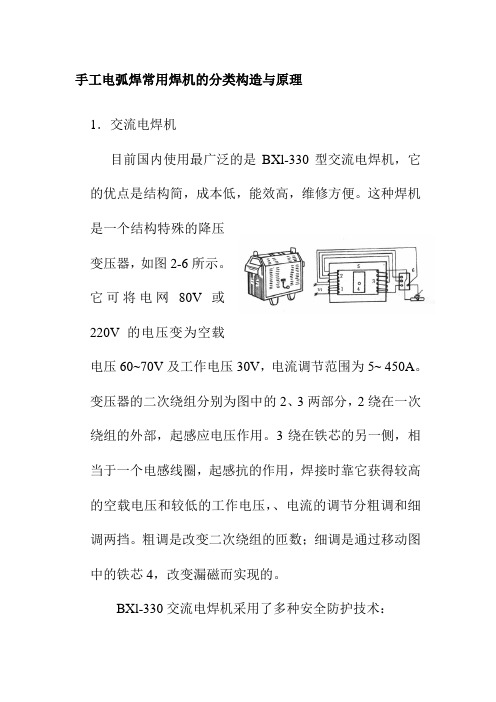
手工电弧焊常用焊机的分类构造与原理1.交流电焊机目前国内使用最广泛的是BXl-330型交流电焊机,它的优点是结构简,成本低,能效高,维修方便。
这种焊机是一个结构特殊的降压变压器,如图2-6所示。
它可将电网80V 或220V 的电压变为空载电压60~70V 及工作电压30V ,电流调节范围为5~ 450A 。
变压器的二次绕组分别为图中的2、3两部分,2绕在一次绕组的外部,起感应电压作用。
3绕在铁芯的另一侧,相当于一个电感线圈,起感抗的作用,焊接时靠它获得较高的空载电压和较低的工作电压,、电流的调节分粗调和细调两挡。
粗调是改变二次绕组的匝数;细调是通过移动图中的铁芯4,改变漏磁而实现的。
BXl-330交流电焊机采用了多种安全防护技术:图2-6 BXl-330交流电焊机 1——次绕组;2、3一二次绕组;4-动铁芯; 5—静铁芯;6—接线片(1)具有陡降的外特性(外特性指在稳定状态下,焊机输出端电压和输出电流的关系)。
当二次回路和电阻值趋于零时,把不断增大的电流值限制在一定的范围内,免除了设备、线路被烧毁,也避免了操作人员被电伤。
(2)装有多孔的铁皮外罩,利用自然空气对流散发热,极大地减缓了绝缘材料老化。
同时,也防止了操作者与带电部分的接触,避免其他导电杂物进入机体造成短路。
(3)具有较大的额定暂载率(65%),保证了长时间工作的可靠性。
(4)装有接线柱罩子,防止人体触电。
(5)装有手把与车轮,便于挪动位置时使用。
注意,这种焊机的手把不得做吊把使用。
这种焊机的缺点是体积较大而且笨重,焊接时活动铁芯被电磁力振动而发出噪声,同时电流有波动。
2.旋转式直流弧焊机AX-320型直流电焊机目前使用较广。
焊机的空载电压为50~80V ,工作电压为30V ,电流调节范围为45~320A ,焊机的外型如图2-7所示。
AX-320型直流电焊机由一台12KW 的三相感应电动机和一台裂极式直流发电机组成。
该焊机由三相电源供电,使电动机驱动发电机电枢旋转发出直流电,供焊接使用,它同样具有降压特性、调节电流特性等性能。
焊接变位机械设计研究
焊接变位机械设计研究焊接变位机械是一种可以帮助焊接过程中工件进行旋转和翻转的设备,它在焊接工艺中具有非常重要的作用。
在焊接自动化过程中,焊接变位机械能够提高焊接效率和质量,减少人力成本和操作风险。
对焊接变位机械的设计和研究具有重要的实际意义。
一、焊接变位机械的类型及其应用1. 类型焊接变位机械根据其结构和工作方式的不同,可以分为旋转式焊接变位机和翻转式焊接变位机两种类型。
旋转式焊接变位机是指通过电机驱动旋转轴,使工件进行旋转的装置。
在焊接过程中,采用旋转式焊接变位机可以使工件保持稳定的旋转速度和角度,从而实现对工件全方位的焊接。
2. 应用焊接变位机械主要用于大型工件焊接过程中的旋转和翻转操作。
在船舶、桥梁、石油化工、风电等领域,需要对大型金属构件进行焊接时,通常就需要使用焊接变位机械来实现对工件的旋转和翻转。
焊接变位机械也可以应用于钢结构、船舶、桥梁等工程机械的生产制造环节。
二、焊接变位机械设计研究现状分析目前,国内外关于焊接变位机械设计研究已经取得了一系列的成果,但与焊接自动化设备的整体发展相比,焊接变位机械的设计研究尚处于起步阶段,存在一些问题和不足。
1. 技术水平不高目前国内焊接变位机械的设计水平相对较低,主要体现在设备的控制精度、稳定性和可靠性方面。
大多数焊接变位机械还停留在传统机械传动和液压控制的阶段,缺乏现代化的电气控制技术和自动化控制系统。
2. 缺乏标准化设计国内焊接变位机械的设计缺乏统一的标准和规范,导致了产品质量参差不齐,生产效率低下,难以满足用户的实际需求。
由于缺乏标准化设计,焊接变位机械的产品结构和性能参数存在较大的差异。
3. 创新能力不足国内焊接变位机械制造企业创新能力不足,缺乏对焊接变位机械的核心技术和关键零部件的研发能力。
目前,市场上主要以进口设备为主,国内产品在技术含量和产品性能上存在明显的差距。
为了提高焊接变位机械的设计水平和产品质量,需要针对关键技术进行深入研究和探讨。
焊接变位机械讲义

焊 接 专 机
环缝焊接专机
环缝焊接系统主要用于 不同材质、不同尺寸和形状 工件的环缝焊接,以提供高 质量的焊缝、减少焊接变形。 焊接接头有不同的形状,包 括对接、角接、搭接、琐底 等接头形式。外部焊接方式 通常的焊接机头处在工件的 顶部,内部焊接需要加其他 装置。 单道和多道GTAW(钨 级氩弧焊)、PAW(等离子 焊)、GMAW(熔化极氩弧 焊)、FCAW(药芯式熔化 极弧焊)、SAW(埋弧焊)、 YAG激光焊接等焊接方法都 可以在焊接机床上实现。作 为选项,焊接机床上可以同 时安装两个以上的焊枪,并 同时进行焊接。
龙门式自动焊接机(中间控制)
按结构设计形式分为: 焊 工 变 位 机 焊 接 变 位 机 械 焊 件 变 位 机 焊 机 变 位 机
焊工升降台
单座
立式 (固定式、可调式、倾斜式) 卧式(固定式、升降式) 机架固定(固定式、升降式)
单回转式
双座
机架移动(固定式、升降式)
自调式、组合式、履带式
多座(滚轮架)
思考:焊件变位机械和焊机 变位机械怎样组合使用?
纵缝焊接专机
纵缝焊机设计采用琴键压紧式机构,提供 均匀稳定的工件夹持和冷却效果,大梁和 焊接小车提供精密的焊接动作,用于进行 高质量、低变形的直线性焊缝的焊接应用。 工件的形式、形状和材质可以不同,大多 数情况下,焊缝是对接接头设计。针对不 同的应用,纵缝焊接系统可以集成的焊接 方式有:GTAW(钨级氩弧焊);PAW (等离子焊);GMAW(熔化极氩弧焊); FCAW(药芯式熔化极弧焊);SAW(埋 弧焊);YAG激光焊接等。 不同焊缝背面保护衬套和成行槽,焊缝 可以被100%焊透,并保证单面焊双面成 型。 焊接焊接专机分为: 外纵缝焊接系统 内缝、纵缝焊接系统 内外组合式纵缝焊接系统 平板拼接纵缝焊接系统 升降式纵缝焊接系统 精密纵缝焊接系统 桌面型焊接系统 自动纵缝焊接系统 立式纵缝焊接系统
超声波焊接变幅杆型号-概述说明以及解释

超声波焊接变幅杆型号-概述说明以及解释1.引言1.1 概述超声波焊接是一种应用超声波能量将两个或多个工件连接在一起的技术。
通过超声波振动产生的摩擦和压力,材料表面在接触区域发生塑性变形,从而实现焊接。
相对于传统的热焊接方法,超声波焊接具有无需外部加热源、能耗低、环境友好、焊接速度快、焊接强度高等优点。
变幅杆是超声波焊接中的关键元件,它负责将振动源产生的高频振动转化为大幅度、低频振动,并传输至焊接头上。
其主要作用是放大振幅,以增大焊接头的振动能量。
变幅杆一般由金属材料制成,具有一定的弹性和刚度。
根据结构和工作原理的不同,变幅杆可以分为两种类型:机械式变幅杆和共振式变幅杆。
机械式变幅杆通过机械机构的放大作用,将振动源产生的高频振动转换为大幅度的低频振动。
共振式变幅杆则利用共振效应,使得振动源的频率和变幅杆的固有频率相吻合,从而实现振幅的最大化。
在实际应用中,不同型号的超声波焊接变幅杆具有不同的特点和适用范围。
根据焊接头的尺寸和材料的不同,可以选择合适的变幅杆型号来实现最佳的焊接效果。
因此,深入研究和分析超声波焊接变幅杆的型号与性能之间的关系,对于提高焊接质量和效率具有重要意义。
总之,超声波焊接是一种高效、可靠的焊接技术,而变幅杆作为其中的关键元件,对焊接效果有着重要的影响。
本文旨在就超声波焊接变幅杆的型号进行深入研究,并对其性能和应用进行总结和展望,以促进超声波焊接技术的发展和应用。
1.2 文章结构文章结构部分的内容如下:文章结构部分旨在介绍本篇长文的框架和组织方式,以帮助读者对整篇文章的结构有一个清晰的认识。
本文采用以下各部分组成的结构:第一部分是引言部分,主要包括概述、文章结构和目的三个小节。
在概述部分,将对超声波焊接变幅杆的重要性和应用背景进行简要介绍,引发读者的兴趣。
文章结构部分将详细说明本文的各个章节和小节的内容安排,以便读者在阅读过程中能够更好地理解文章的逻辑结构和脉络。
目的部分将明确本文的写作目标和意义,指出本文的研究意义和实际应用价值。
500kg伸臂式焊接变位机祥解
摘要随着现代工程机械结构焊接件大多数趋向复杂化,而且是整机主要关键部件,其焊接质量的好坏直接影响整机性能。
设计合适的焊接变位机能提高焊接质量及生产效率,降低工人的劳动强度及生产成本,加强安全文明生产,有利于现场管理。
而且有利于自动化大生产,特别是入世的冲击,工程机械市场竞争将会越来越激烈,国内企业必须适应形势,通过焊接变位机等基础设备投入达到生产能力的革命。
从而使整个工程进入一个好的发展态势。
焊接变位机,是通用型系列化产品,焊接变位机被广泛应用在钢铁企业、汽车企业、造船厂以及轻工业的生产线。
主要用于机架、机座、机壳等非长形工件的焊接。
既可以焊接大型零件,也可以焊接精密小型零件。
工作过程中噪音较小,结构简单。
焊接变位机按结构形式可分为三种。
伸臂式焊接变位机适用于轻小焊件的翻转变位。
座式焊接变位机是应用较广的一种焊接变位机。
双座式焊接变位机适用于大型和重型工件的翻转变位。
本设计因考虑小型零件焊接的精度,故选用伸臂式焊接变位机。
在设计过程中,通过实地考察,并查阅大量相关资料,对伸臂式焊接变位机有了一定的了解。
根据实际需要,本设计选用500kg伸臂式焊接变位机,其主要由工作台回转机构、旋转伸臂机构、伸臂旋转减速器机构等部分组成,并且在其中安有测速发电机和导电装置,保证了设备的精度和使用寿命。
关键词:焊接变位机;旋转;翻转AbstractSince the modern mechanical engineering structure welding, which is the main part of the whole machine, becomes more complex, the quality of welding directly associates with the performance of the machine. Thus, the design of a fine welding conjugation machine can consequently raise welding quality and efficiency, reduce labor and cost of production, enhance manufacturing safety, and benefit the on-the-spot management. What is more, it fits the enormous production of automation. Especially under the pressure of the entrance to WTO, competition in the mechanical engineering market will become fiercer, therefore, domestic enterprises have to comply with the tendency through the application of some basic equipment, such as welding configuration machine to realize the revolution of productive forces and lead the whole project to a better prosperous future.Welding configuration machine is a kind of general production which is widely applied in the steel and iron enterprises、auto-enterprises、shipyard and light industry. It is primarily for the non-long work piece, such as the machine rack, seat and shell. It can not only weld big part, but also some precision parts. Little noise will be produced during its working and it bears simple structure. According to the structure form, welding conjugation machine can be divided into three kinds: Stretching welding conjugation machine is applicable to the small welded pieces.Stand type welding machine is a broader application of conjugation machine. Double-stand welding machine fits the conjugation of big and heavy work pieces.Since this design considers the precision of some small parts’ welding, thus stretching welding conjugation machine is employed. During the process of the whole design, the author conducted the on-the-spot investigation and consulted plenty of technical data and literature, which made him understand more about the machine. Based on the practical need, this design employed 500 KG stretching welding machine, which is mainly composed byworkstations rotation、rotation stretching structure and stretching rotation reducer. Moreover, speed-testing generator and electricity conduct device is set in this machine, thus the precision and service life of the equipment is guaranteed.key word:Welding displacing machine;revolve;turnover目录摘要 (I)Abstract (II)一、概述 (1)(一)国内外焊接装备的发展应用与现状 (1)1.国内焊接装备的发展与类型 (1)2.国外焊接装备的发展与类型 (4)(二)选题材料与总体设计要求 (7)(三)本论文研究内容 (7)二、方案设计 (8)(一)伸臂式焊接变位机的整体结构设计 (8)(二)伸臂式焊接变位机的主要部件 (9)1.驱动装置 (9)2.传动装置 (9)3.工作台 (10)4.导电装置 (10)5.控制装置 (11)6.旋转伸臂设计 (11)7.其余辅助零件设计与选择 (12)三、设计计算 (15)(一)工作台回转机构初定设计参数 (15)(二)电动机计算参数与选用 (15)(三)工作台回转机构V带传动计算参数与选用 (16)(四)工作台回转机构高速级蜗轮蜗杆设计与选用 (18)四、提高圆柱蜗杆传动质量的方法 (24)(一)合理选择几何参数,提高传动质量 (24)(二)消除不利的啮合部位 (24)(三)利用良好的啮合场 (24)(四)双重蜗杆传动 (25)(五)改变共轭齿面的摩擦形式 (25)(六)变蜗杆副接触线特性 (25)(七)其他方法 (25)五、技术经济分析与评价 (26)(一)伸臂式焊接变位机经济性分析 (26)(二)伸臂式焊接变位机的环保性分析 (26)结束语 (27)参考文献 (28)致谢 (29)一、概述(一)国内外焊接装备的发展应用与现状焊接辅助设备确切的名称应为焊接工艺装备,简称焊接装备。
焊机变位机械

教学目标:1、理解焊接变位机械的概念、种类及其应用;2、掌握各种焊机变位机械的特点及使用;3、会要根焊件的特点合理选择焊机变位机械;教学重点:1、平台式焊接操作机;2、伸缩臂式焊接操作机;教学难点:焊接操作机的选用教学内容:焊机变位机(又称焊接操作机)是将焊接机头准确送达并保持在待焊位置,或是以选定的焊接速度沿规定的轨迹移动焊接机头,配合完成焊接操作的焊接变位机械。
与焊件变位机械配合使用,可以完成多种焊缝,如纵缝、环缝、对接焊缝、角焊缝及任意曲线焊缝的自动焊接工作,也可以进行焊件表面的自动堆焊和切割工艺。
1.焊接操作机(1)平台式操作机平台式操作机的基本结构形式如图5-23所示,将焊接机头1放置在平台2上,可在平台的专用轨道上作水平移动。
平台安装在立架3上且可沿立架升降。
立架坐落在台车4上,台车沿地轨运行,调整平台与焊件之间的位置。
平台式操作机有单轨式和双轨式两种类型,为防止倾覆,单轨式须在车间的墙上或柱上设置另一轨道(图5-23a);双轨式在台车上或支架上放置配重5平衡(图5-23b),以增加操作机工作的稳定性。
图5-23 平台式操作机平台操作机主要用于筒形容器的外纵缝和外环缝的焊接。
焊接外纵缝时,焊件横放置平台下固定,焊机在平台上沿专用轨道以焊接速度移动完成焊接。
当焊接外环缝时,焊机固定,焊件依靠滚轮架回转完成焊接。
一般平台上还设置起重电葫芦,目的是吊装焊丝、焊剂等重物,从而保证生产的连续性。
平台操作机的机动性、使用范围、用途均低于伸缩臂式的焊接操作机,在国内的应用已逐年减少。
(2)悬臂式焊接操作机如图5-24所示,悬臂式操作机主要用来焊接容器的内纵缝和内环缝。
悬臂3上面安装有专用轨道,焊机在轨道上移动完成内纵缝的焊接;当焊接内环缝时,焊机在悬臂上固定,容器依靠滚轮架回转而完成工作。
悬臂通过升降机构2与行走台车1相连,悬臂的升降是由手轮通过蜗杆蜗轮机构和螺纹传动机构来实现的。
为便于调整悬臂高低和减少升降机构所受的弯曲力矩,安装了平衡锤用以平衡悬臂。
变位机

焊接机器人焊接机器人系统的组成和分类机器人要完成焊接作业必须依赖控制系统与辅助设备的支持和配合。
完整的焊接机器人系统一般由以下几个部分组成:机器人操作机、变位机、控制器、焊接系统(专用焊接电源、焊枪或焊钳等)、焊接传感器、中央控制计算机和相应的安全设备等。
机器人操作机是焊接机器人系统的执行机构,其任务是精确地保证末端执行器(焊枪)所要求的位置、姿态并实现其运动。
一般情况下,工业机器人操作机至少应具有3个以上自由度。
具有6个旋转关节的铰接开链式机器人操作机能以最小的结构尺寸获取最大的工作空间,并且能以较高的位置精度和最优的路径到达指定位置,因而在焊接领域得到广泛的应用。
变位机是机器人焊接生产线及焊接柔性加工单元的重要组成部分,其作用是将被焊工件旋转(平移)到最佳的焊接位置。
在焊接作业前和焊接过程中,变位机通过夹具装卡和定位被焊工件。
通常,焊接机器人系统采用两台变位机,一台进行焊接作业,另一台则完成工件装卸。
机器人控制器是整个机器人系统的神经中枢。
控制器负责处理焊接机器人工作过程中的全部信息和控制其全部动作。
焊接系统是焊接机器人得以完成作业的必需装备,主要由焊钳或焊枪、焊接控制器以及水、电、气等辅助部分组成。
焊接控制器是焊接系统的控制装置,它根据预定的焊接监控程序,完成焊接参数输入、程序控制及系统故障自诊断,并实现与上位机的通信联系。
焊接电源及送丝设备必须由机器人控制系统直接控制,电源的功率和接通时间必须与自动过程相符。
在焊接过程中,由于存在被焊工件几何尺寸和位置误差以及焊接过程中的热变形,传感器仍是焊接过程中不可缺少的设备。
传感器的任务是实现工件坡口的定位、跟踪以及焊缝熔透信息的获取。
中央控制计算机(上位机)在工业机器人向系统化、PC化和网络化的发展过程中发挥着重要的作用。
通过相应接口与机器人控制器相连接,中央控制计算机主要用于形成通信网络,同时与传感系统相配合,实现焊接路径和参数的离线编程、焊接专家系统的应用及生产数据的管理。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
焊接变位机型式与系列的论述天津工程机械研究院郑永强1 引言在我国,焊接变位机也已悄然成为制造业的一种不可缺少的设备,在焊接领域把他划为焊接辅机。
近十年来,这一产品在我国工程机械行业,有了较大的发展,获得了广泛的应用。
就型式系列和品种规格而言,已问世的,约有十余个系列,百余品种规格,正在形成一个小行业。
笔者希望这一产品能健康、有序、迅速的发展;企业能在一个平等的技术上竞争。
在我国,乃至国际范围内,有关焊接变位机的基本概念、型式与分类、主要技术参数等,存在不统一的问题。
甚至存在某些量纲混淆问题,笔者希望能有一个统一的认识。
在人们的眼里,可能认为焊接变位机是一个无足轻重的产品。
然而,在国际上,包括各种功能的产品在内,有百余系列。
在技术上有普通型的;有无隙传动伺服控制型的;产品的额定负荷范围,达到0.1kN~18000 kN。
可以说,焊接变位机是一个品种多,技术水平不低,小、中、大发展齐全的产品。
本文希望给他一个应有的技术定位。
2 国内外焊接变位机发展简介本文不是研究国内外焊接变位机发展情况的专著。
从上述研究目的出发,在此仅做简介。
一般说来,生产焊接操作机、滚轮架、焊接系统及其他焊接设备的厂家,大都生产焊接变位机;生产焊接机器人的厂家,大都生产机器人配套的焊接变位机。
但是,以焊接变位机为主导产品的企业,非常少见。
德国Severt公司,美国Aroson公司,我国天津鼎盛工程机械有限公司等,算是比较典型的生产焊接变位机的企业。
德国的CLOOS、奥地利igm、日本松下机器人公司等,都生产伺服控制与机器人配套的焊接变位机。
以下仅就变位机型式、第一主参数等做些介绍。
2.2 德国Severt公司该公司主要生产8种类型的产品,其中7种是焊接变位机。
每种型式的焊接变位机,按其功能讲,均包括基本型、调速型、CNC程控型和机器人配套型等4种产品。
⑴S10型,包括S10.1、2、3、4型等4个产品系列。
即:①L型双回转式、L型双回转升降式;②L型双回转-倾翻式、L型双回转-倾翻升降式;③2³L型双回转式、2³L型双回转升降式;④2³L型双回转-倾翻式、2³L型双回转-倾翻升降式。
⑵S20型,包括S20.1、2型2个产品系列。
即:①单座单回转式、单座单回转升降式;②C型双回转式。
⑶S30型,包括S30.1、2型2个产品系列。
即:①立式单回转;②立式单回转双工位。
⑷S40型,包括S40.1、2、3、4、5、6、7等7个产品系列。
即:①双座单回转分体式;②双座首尾单回转式;③H型双座双回转式;④双座首尾单回转尾架移动式;⑤双座首尾倾翻尾架移动式;⑥双座3轴单回转式;⑦单座滚圈单回转式、双座滚圈单回转尾架移动式。
⑸S50型:包括S50.1、2、3、4、5、6、7型,7个多轴(自由度)产品系列。
即:①立式3轴单回转双工位式;②立式单回转双工位2³倾翻--回转式(5轴);③立式单回转多工位2³L型双回转式(5轴);④立式单回转双工位2³L型双回转倾翻式(7轴);⑤立式单回转双工位2³双座单回转式(3轴);⑥立式单回转双工位2³C型双回转式(5轴);⑦立式单回转双工位2³卧式单座单回转(3轴)。
⑹S60型:包括S60.1、2型2个产品系列。
即:①倾翻--回转式(0°~90°);②倾翻--回转式(±90°)。
⑺S70型:包括S70.1、2、3型3个产品系列。
即:①立式多工位式4轴(4自由度)单回转;②立式多工位2³倾翻--回转式(6自由度);③立式4工位立式4轴单回转。
以上共33个产品型式,每种型式都包括上述四种功能的产品,相当于132个产品系列。
额定负荷为100dN~10kdN。
2.2 美国Aroson公司美国Aroson公司生产的焊接设备有焊接变位机、操作机、滚轮架等,可称世界之最。
这个公司生产的焊接变位机,主要类型为倾翻—回转式、倾翻—回转升降式、双座双回转式,双座单回转式和双座单回转升降式。
其承载能力范围为11 kg~1810吨。
⑴手动双回式。
C 系列,型号C1000、2000、4000。
承载能力25磅~4000磅。
⑵小型倾翻-回转式。
LD系列,型号LD 60N、150N、300N,承载能力分别为132磅、330磅、660磅。
⑶倾翻-回转式,倾翻角度135°。
D、HD系列,承载能力314磅~7万磅⑷倾翻-回转(换销)定位升降式,倾翻角度135°。
AB系列(30~AB1200),承载能力4300磅~12万磅。
⑸倾翻-回转(齿轮齿条)无级升降式,GE系列,倾翻角度135°,型号(GE25~GE3500,承载能力2500磅~35万磅。
⑹倾翻-回转式,倾翻角度90°,G系列,G400~G4-MEGA型,承载能力4000磅~400万磅。
⑺双座双回转式,DCG系列,最大产品承载能力为500吨。
⑻单回转式HTS 系列,HTS5、9、12、20、32、40、50、60、90、160、240,承载能力为500磅~24万磅。
⑼单回转(齿轮齿条)升降式,HTS- GE系列,HTS5 GE、HTS 240GE,承载能力为500磅~24万磅。
2.3 德国LCOOS公司德国LCOOS公司是国际上生产焊接设备的大型公司之一。
生产焊接机器人、焊机等产品。
也生产作为焊接机器人外部轴的焊接变位机。
在我国,除可见到与焊接机器人系统配套进口的L型双回转式、倾翻-回转式和单回转式变位机外,还生产卧式单坐单回转WPV、立式单回转RR502以及各种多轴焊接机器人配套的变位机,如立式多工位2³卧式单回转R-WPV 2型(3轴)、立式多工位2³C型双回转式R- WPV2-CD(5自由度)、立式多工位2³倾翻-回转GR-WPK 2(5轴)、立式多工位2³倾翻-回转³单回移动转式GR-WPK 2-CD (9轴)等。
这些产品的主参数,最大允许承载能力(max. admissible load capacity)用N表示。
2.4 日本松下(Panasonic)公司日本松下公司也是机器人制造公司。
这个公司生产的机器人外部设备—焊接变位机有12个系列。
他们把传动装置、机座、夹具体等作成了标准模块,集合而成这些产品系列。
按轴数和结构型式分类。
1轴变位机3个系列,即:立式单回转、卧式单座单回转、双座单回转式;2轴变位机有5个系列,即:C、L、H、准L型双回转式及2³卧式单座单回转式;3轴变位机有3个系列,即:立式多工位2³立式单回转、卧式多工位2³双座单回转式、2³卧式单座单回转式;5轴变位机有1个系列,立式多工位2³L型双回转式。
最大有效负荷(Max. payload)200kg、500kg、1000kg。
2.5 国内变位机的产品简介现在我国生产焊接变位机的厂家已经不少,大都不成规模。
以变位机为主导产品发展起来的企业,尚未形成。
天津鼎盛公司工程机械有限公司、无锡市阳通机械设备有限公司、长沙海普公司、威达自动化焊接设备公司等单位生产的变位机在国内占有较大市场。
到2000年,国内已开发的变位机产品约70余品种规格。
以下简述这些变位机的基本型式。
⑴全双回转式。
包括L、H(双座)、C型双回转式(BZ2-、BZ2A-、BZ2B-、BZ2D-系列)。
⑵倾翻-回转式焊接变位机(BZ2C-系列)。
⑶单回转式焊接变位。
包括三种型式:双座单回转式(BZ-、BZ1--、BZA--、BZA1--系列)、双座单回转尾架移动式(BZY--、BZAY-、BZA1Y-系列)、单座单回转(立式BZAL-、BZL-,卧式BZW-、BZAW-斜式BZAX-系列)。
以上基本型产品发展了17个系列,主要为普通型,用于手把焊。
此外,还有调速型、联控型(PLC、微机控制)和机器人配套型产品。
与焊接机器人配套用的变位机,开发了十余个品种。
包括:工位变换变位机(不参与焊接),如,立式双工位、四工位、八工位变位机,双座单回转式八工位和倾翻回转式双工位变位机等;与机器人配套焊接变位机(机器人外部轴),如,倾翻-回转伺服传动式、双座单回转伺服传动式、多轴单回转伺服传动式等。
3 关于焊接变位机几个基本定义的讨论3.1 焊接变位机的定义在我国,焊接变位机是一个年青的产品。
由于制造业之间发展水平的差异,很多企业的焊接工位,还没有装备焊接变位机;同时,相关的研究也比较薄弱。
迄今为止,没有专门著作去研究它的定义和分类。
对它的称呼也就不可能规范化了。
同一种设备,不同的企业和不同的人可能有不同的称呼。
如:转胎、转台、翻转架、变位器、变位机等。
为此,我们需要赋予它一个定义。
我们称:用来拖动待焊工件,使其待焊焊缝运动至理想位置进行施焊作业的设备,称焊接变位机。
也就是说,把工件装夹在一个设备上,进行施焊作业。
焊件待焊焊缝的初始位置,可能处于空间任一方位。
通过回转变位运动后,使任一方位的待焊焊缝,变为船角焊、平焊或平角焊施焊作业。
完成这个功能的设备称焊接变位机。
它改变了可能需要立焊、仰焊等难以保证焊接质量的施焊操作。
从而,保证了焊接质量,提高了焊接生产率和生产过程的安全性。
3.2 主自由度及全功能焊接变位机可以肯定的讲,如果一台变位机拖动焊件,仅做直线运动,哪怕是三维的,也不可能改变焊缝的姿态,满足施焊要求。
也就是说,变位运动是回转运动,称此回转运动为变位机的主自由度。
还可以做这样一个假设:在X、Y、Z直角坐标系下,设有一空间直线焊缝,绕Z轴可在360°范围内回转,且这个Z轴连同这一焊缝又可绕X(或Y)轴在≥180°范围内回转,那么,经此变位的焊缝,便可变到船角焊位置进行施焊作业。
换言之,一个焊口由两个面的共线MN和夹角α组成,在上述两个回转范围内,经恰当的回转,便可使其共线MN 与水平面平行,且这两个面与水平面的夹角相等,各为α/2,即变为船角焊位置。
这个假设是说,任何复杂焊件,只要装在主自由度为一个全回转和一个半回转的焊接变位机上,即可实现船焊要求。
我们称这种双回转式焊接变位机为全功能变位机。
3.3 焊接变位机的变位自由度涉及到用户对设备装备的理念,以及考虑用于手把焊和自动焊的不同用途,选择和设计焊接变位机时,除主变位自由度外,还要考虑增加辅助变位自由度。
如大件焊接,可增加升降运动自由度,如上述美国、德国这种产品很多。
另外,某些焊件,由于焊缝分布简单,用一个回转自由度就可以解决焊件中大部分和重要焊缝的船焊要求,其余少量非重要焊缝,虽然,不能实施船角焊,但可以实施平角焊。
这样,为简化设备造价,工艺上便考虑采用单自由度或功能退化的焊接变位机,即单回转式变位机。